



1. Introduction
Inertial waves and internal gravity waves are waves propagating in rotating and stratified fluids, respectively. In three dimensions, when forced locally in a uniformly rotating (or stratified) fluid, these waves have the particularity to propagate along a double cone that makes a constant angle with respect to the axis of rotation (or to the direction of stratification). This property allows one to show that, when propagating within a closed container, wave packets may converge after multiple reflections on solid boundaries to a particular surface called attractor in two dimensions (Maas & Lam Reference Maas and Lam1995) or axisymmetric geometries such as the spherical shell (Rieutord & Valdettaro Reference Rieutord and Valdettaro1997). One of the simplest geometries giving rise to attractors is a rectangular container with a sloping boundary. This trapezoidal geometry has been the subject of numerous works since the first study in a stratified fluid by Maas et al. (Reference Maas, Benielli, Sommeria and Lam1997). The theoretical attractors obtained by ray tracing have been observed both experimentally (Hazewinkel et al. Reference Hazewinkel, Van Breevoort, Dalziel and Maas2008, Reference Hazewinkel, Tsimitri, Maas and Dalziel2010; Scolan, Ermanyuk & Dauxois Reference Scolan, Ermanyuk and Dauxois2013) and numerically (Drijfhout & Maas Reference Drijfhout and Maas2007; Grisouard, Staquet & Pairaud Reference Grisouard, Staquet and Pairaud2008). Similar results were also obtained in rotating fluids in the same geometry (Maas Reference Maas2001; Manders & Maas Reference Manders and Maas2003, Reference Manders and Maas2004) or in its axisymmetric version (Klein et al. Reference Klein, Seelig, Kurgansky, Ghasemi, Borcia, Will, Schaller, Egbers and Harlander2014; Sibgatullin et al. Reference Sibgatullin, Xu, Tretyakov and Ermanyuk2019; Boury et al. Reference Boury, Sibgatullin, Ermanyuk, Shmakova, Odier, Joubaud, Maas and Dauxois2021; Pacary et al. Reference Pacary, Dauxois, Ermanyuk, Metz, Moulin and Joubaud2023). Attractors have also been found to be generic features of inertial waves in spherical shells (Rieutord & Valdettaro Reference Rieutord and Valdettaro1997; Rieutord, Georgeot & Valdettaro Reference Rieutord, Georgeot and Valdettaro2000). Early studies concerned attractors localised close to the equator (Stern Reference Stern1963; Bretherton Reference Bretherton1964; Stewartson Reference Stewartson1972) which possess similar properties to two-dimensional (2-D) attractors (Rieutord, Valdettaro & Georgeot Reference Rieutord, Valdettaro and Georgeot2002). However, the picture seems more complex in a spherical shell owing to the presence of the rotation axis in the domain and of a critical latitude singularity issued from the inner sphere (Rieutord & Valdettaro Reference Rieutord and Valdettaro2010, Reference Rieutord and Valdettaro2018; He et al. Reference He, Favier, Rieutord and Le Dizès2022, Reference He, Favier, Rieutord and Le Dizès2023). The robustness of attractors has been analysed with respect to wall friction (Beckebanze et al. Reference Beckebanze, Brouzet, Sibgatullin and Maas2018), nonlinearity (Grisouard et al. Reference Grisouard, Staquet and Pairaud2008; Favier et al. Reference Favier, Barker, Baruteau and Ogilvie2014; Jouve & Ogilvie Reference Jouve and Ogilvie2014; Beckebanze et al. Reference Beckebanze, Grayson, Maas and Dalziel2021; Ryazanov et al. Reference Ryazanov, Providukhina, Sibgatullin and Ermanyuk2021) and instabilities (Brouzet et al. Reference Brouzet, Sibgatullin, Scolan, Ermanyuk and Dauxois2016b, Reference Brouzet, Ermanyuk, Joubaud, Pillet and Dauxois2017; Dauxois et al. Reference Dauxois, Joubaud, Odier and Venaille2018). The 2-D framework has also been used to obtain most of the available mathematical results (Maas & Lam Reference Maas and Lam1995; Manders, Duistermaat & Maas Reference Manders, Duistermaat and Maas2003; Maas Reference Maas2009; Bajars, Frank & Maas Reference Bajars, Frank and Maas2013; Beckebanze & Keady Reference Beckebanze and Keady2016; de Verdière & Saint-Raymond Reference de Verdière and Saint-Raymond2020; Dyatlov, Wang & Zworski Reference Dyatlov, Wang and Zworski2022; Makridin et al. Reference Makridin, Khe, Sibgatullin and Ermanyuk2023).
While fundamental in nature, studies about attractors are motivated by their ability to focus energy at small length scales, which could potentially impact the dissipative properties of many geophysical systems. Internal gravity waves and attractors can break and lead to turbulence (Staquet & Sommeria Reference Staquet and Sommeria2002; Brouzet et al. Reference Brouzet, Ermanyuk, Joubaud, Sibgatullin and Dauxois2016a), and as such are known to play an important role in the energy budget of the ocean, where they are often excited by tides (Wunsch Reference Wunsch1975). Attractors can for example be excited by tidal waves in a paraboloidal basin (Maas Reference Maas2005) or between two ridges (Echeverri et al. Reference Echeverri, Yokossi, Balmforth and Peacock2011). Their occurrence has been analysed in the configurations of the Mozambique Channel (Manders, Maas & Gerkema Reference Manders, Maas and Gerkema2004) and of the Luzon strait (Tang & Peacock Reference Tang and Peacock2010; Wang et al. Reference Wang, Zheng, Lin, Dai and Qiao2015). In the astrophysical context, inertial waves and attractors could be important in the synchronisation processes of rapidly rotating astrophysical objects as they provide a way to rapidly dissipate energy (Zahn Reference Zahn1975; Ogilvie & Lin Reference Ogilvie and Lin2004).
Most of the works mentioned above have considered a 2-D or a 3-D framework with symmetry (axisymmetric or invariant along one direction). In that case, rays were assumed to remain confined within a particular 2-D plane since the system is effectively invariant along the third direction. As soon as the rays are assumed to propagate out of this 2-D plane, it becomes important to consider the 3-D reflection law of localised wave beams (Manders & Maas Reference Manders and Maas2004; Maas Reference Maas2005). This was done in an axisymmetric geometry by Maas (Reference Maas2005) and Rabitti & Maas (Reference Rabitti and Maas2013, Reference Rabitti and Maas2014), and in a 3-D rectangular domain with a sloping wall but invariant along one direction by Manders & Maas (Reference Manders and Maas2004) and Pillet et al. (Reference Pillet, Ermanyuk, Maas, Sibgatullin and Dauxois2018). For both the axisymmetric spherical shell and the 3-D trapezoidal basin that has a uniform shape in a transverse direction, the authors showed that the attractor is possibly trapped in a specific plane which depends on the initial conditions of the ray tracing protocol. To our knowledge, the only study who considered a completely 3-D geometry is the recent work of Pillet, Maas & Dauxois (Reference Pillet, Maas and Dauxois2019). They considered a trapezoidal geometry, but for which the sloping plane is also inclined in the transverse direction, thus breaking the symmetry on which previous studies were implicitly constructed. In that case, the ray beams tend to drift along the twice-inclined boundary towards the vertical boundary eventually closing the domain. The rays accumulate there around a trapped attractor close to the vertical boundary (Pillet et al. Reference Pillet, Maas and Dauxois2019), which is not due to a global focusing but instead due to the arrest by the vertical side boundary of the continuous shift of the wave beams.
In the present work, focusing on the purely rotating case with inertial waves only, we consider a 3-D non-axisymmetric geometry and show that we obtain a global focusing, regardless of initial conditions, of the wave beams along a local curve (as opposed to a surface in the axisymmetric case). Contrary to the work of Pillet et al. (Reference Pillet, Maas and Dauxois2019), our attractor does not rely on the confinement induced by a vertical boundary but is trapped in the bulk of the fluid domain. We thereby provide the first evidence of a super-attractor, that is, a 1-D curve on which all rays tend to focus after multiple reflections on solid boundaries, regardless of their initial positions and orientations within the fluid volume. In § 2, we present the framework, the 3-D reflection law and our geometry (a truncated elliptic cone). In § 3, we demonstrate that, in our geometry, ray beams corresponding to waves of a given frequency do converge for almost all initial conditions to a unique limit cycle. This limit cycle only depends on the geometry and the frequency of the waves. An analytic formula for the contracting factors obtained in the two focusing directions is derived in this section and compared with numerical ray tracing results. In § 4, numerical simulations of the linear viscous problem are presented. We show that the viscous response to a global forcing tends to be focused onto the super-attractor. A preliminary scaling with respect to the Ekman number is also proposed for the velocity amplitude, before we finally present our conclusions.
2. Formulation of the problem and methods
In this section, we describe the equations of motion, the reflection law of a localised wave packet and the particular geometry considered for the rest of the study.
2.1. General problem and equations
We consider the incompressible flow of a fluid of constant kinematic viscosity  $\nu$ contained inside a closed container rotating at a constant rate
$\nu$ contained inside a closed container rotating at a constant rate  $\boldsymbol {\varOmega }=\varOmega \boldsymbol {e}_z$. While we expect our results to remain valid when the fluid is stratified in density, due to the similarity in the dispersion relations and propagation properties, we focus on the purely rotating case here for simplicity. Using
$\boldsymbol {\varOmega }=\varOmega \boldsymbol {e}_z$. While we expect our results to remain valid when the fluid is stratified in density, due to the similarity in the dispersion relations and propagation properties, we focus on the purely rotating case here for simplicity. Using  $1/(2\varOmega )$ as the time scale and the characteristic length scale
$1/(2\varOmega )$ as the time scale and the characteristic length scale  $a$ of the container as the reference length scale, and focusing on infinitesimal perturbations to the solid body rotation flow, the linearised dimensionless equations of motion in the rotating frame are
$a$ of the container as the reference length scale, and focusing on infinitesimal perturbations to the solid body rotation flow, the linearised dimensionless equations of motion in the rotating frame are
 $$\begin{gather} \frac{\partial\boldsymbol{u}}{\partial t}+\boldsymbol{e}_z\times\boldsymbol{u} ={-}\boldsymbol{\nabla} P+E\nabla^2\boldsymbol{u}, \end{gather}$$
$$\begin{gather} \frac{\partial\boldsymbol{u}}{\partial t}+\boldsymbol{e}_z\times\boldsymbol{u} ={-}\boldsymbol{\nabla} P+E\nabla^2\boldsymbol{u}, \end{gather}$$ $$\begin{gather}\boldsymbol{\nabla}\boldsymbol{\cdot}\boldsymbol{u} =0, \end{gather}$$
$$\begin{gather}\boldsymbol{\nabla}\boldsymbol{\cdot}\boldsymbol{u} =0, \end{gather}$$
where  $\boldsymbol {u}$ is the perturbation velocity,
$\boldsymbol {u}$ is the perturbation velocity,  $P$ is the pressure incorporating the centrifugal acceleration and
$P$ is the pressure incorporating the centrifugal acceleration and  $E=\nu /(2\varOmega a^2)$ is the Ekman number. We shall focus on the response to a harmonic boundary forcing of dimensionless frequency
$E=\nu /(2\varOmega a^2)$ is the Ekman number. We shall focus on the response to a harmonic boundary forcing of dimensionless frequency  $\omega$ and for small Ekman numbers. The frequency of inertial waves is bounded by twice the rotation rate and we therefore focus on dimensionless frequencies comprised between 0 and 1.
$\omega$ and for small Ekman numbers. The frequency of inertial waves is bounded by twice the rotation rate and we therefore focus on dimensionless frequencies comprised between 0 and 1.
Information on the solution can be obtained in an inviscid framework by monitoring the propagation of localised wave beams, as detailed in the next section.
2.2. Reflection law of a localised beam
Our description mainly follows the approach of Manders & Maas (Reference Manders and Maas2004), Maas (Reference Maas2005), Rabitti & Maas (Reference Rabitti and Maas2014) and Pillet et al. (Reference Pillet, Ermanyuk, Maas, Sibgatullin and Dauxois2018, Reference Pillet, Maas and Dauxois2019). However, we slightly modify their approach to obtain a simpler reflection law.
As in Rabitti & Maas (Reference Rabitti and Maas2014), we consider a wave beam of frequency  $\omega$ that is sufficiently localised such that it travels along a geometrical ray path. Each ray is characterised by its angle of propagation
$\omega$ that is sufficiently localised such that it travels along a geometrical ray path. Each ray is characterised by its angle of propagation  $\varphi$ with respect to the vertical rotation axis
$\varphi$ with respect to the vertical rotation axis  $\boldsymbol {e}_z$ and by its azimuthal angle
$\boldsymbol {e}_z$ and by its azimuthal angle  $\phi$ with respect to the axis
$\phi$ with respect to the axis  $\boldsymbol {e}_x$. We assume
$\boldsymbol {e}_x$. We assume  $0\leq \varphi \leq {\rm \pi}$ and
$0\leq \varphi \leq {\rm \pi}$ and  $0\leq \phi < 2 {\rm \pi}$. The angle
$0\leq \phi < 2 {\rm \pi}$. The angle  $\varphi$ is given by
$\varphi$ is given by  ${\rm \pi} /2 \pm \theta$, where the angle
${\rm \pi} /2 \pm \theta$, where the angle  $\theta$ (between 0 and
$\theta$ (between 0 and  ${\rm \pi} /2$) is fixed by the frequency of the inertial oscillations according to the dispersion relation of inertial waves, which in our dimensionless formulation is simply
${\rm \pi} /2$) is fixed by the frequency of the inertial oscillations according to the dispersion relation of inertial waves, which in our dimensionless formulation is simply
 \begin{equation} \omega=\cos\theta . \end{equation}
\begin{equation} \omega=\cos\theta . \end{equation}
This condition means that the rays propagate in an axial cone that makes an angle  $\theta$ with respect to the horizontal plane. This property is maintained during the ray propagation, including when it reflects on solid boundaries (Phillips Reference Phillips1966). In two-dimensional or axisymmetric domains, this non-specular reflection can lead to limit cycles towards which all rays converge. These cycles are called attractors.
$\theta$ with respect to the horizontal plane. This property is maintained during the ray propagation, including when it reflects on solid boundaries (Phillips Reference Phillips1966). In two-dimensional or axisymmetric domains, this non-specular reflection can lead to limit cycles towards which all rays converge. These cycles are called attractors.
The horizontal (or azimuthal) angle  $\phi$ is irrelevant in two dimensions since the ray always propagates inside the same predefined plane. In three dimensions, however, the ray is free to move through the whole volume. Contrary to
$\phi$ is irrelevant in two dimensions since the ray always propagates inside the same predefined plane. In three dimensions, however, the ray is free to move through the whole volume. Contrary to  $\varphi$,
$\varphi$,  $\phi$ is not conserved during reflections on solid boundaries. The reflection law is not specular but corresponds to a tendency for the ray to converge towards the vertical plane containing the steepest descent direction. This has been extensively discussed in Manders & Maas (Reference Manders and Maas2004), Rabitti & Maas (Reference Rabitti and Maas2013, Reference Rabitti and Maas2014) and Pillet et al. (Reference Pillet, Ermanyuk, Maas, Sibgatullin and Dauxois2018, Reference Pillet, Maas and Dauxois2019).
$\phi$ is not conserved during reflections on solid boundaries. The reflection law is not specular but corresponds to a tendency for the ray to converge towards the vertical plane containing the steepest descent direction. This has been extensively discussed in Manders & Maas (Reference Manders and Maas2004), Rabitti & Maas (Reference Rabitti and Maas2013, Reference Rabitti and Maas2014) and Pillet et al. (Reference Pillet, Ermanyuk, Maas, Sibgatullin and Dauxois2018, Reference Pillet, Maas and Dauxois2019).
In the present study, we shall use the following relation between the incident and reflected angles  $\phi _i$ and
$\phi _i$ and  $\phi _r$ when a ray reflects on a plane surface inclined by an angle
$\phi _r$ when a ray reflects on a plane surface inclined by an angle  $\alpha$ (between 0 and
$\alpha$ (between 0 and  ${\rm \pi} /2$) with respect to the horizontal plane (see figure 1):
${\rm \pi} /2$) with respect to the horizontal plane (see figure 1):
 \begin{equation} \tan (\phi_r -\phi_{\boldsymbol n}) = \frac{(\tan^2\theta - \tan^2\alpha) \sin(\phi_i -\phi_{\boldsymbol n})}{ (\tan ^2\theta + \tan^2 \alpha ) \cos(\phi_i -\phi_{\boldsymbol n}) + 2 \zeta \tan \alpha \tan \theta }. \end{equation}
\begin{equation} \tan (\phi_r -\phi_{\boldsymbol n}) = \frac{(\tan^2\theta - \tan^2\alpha) \sin(\phi_i -\phi_{\boldsymbol n})}{ (\tan ^2\theta + \tan^2 \alpha ) \cos(\phi_i -\phi_{\boldsymbol n}) + 2 \zeta \tan \alpha \tan \theta }. \end{equation}
In this expression,  $\phi _{\boldsymbol n}$ is the azimuthal angle of the normal vector
$\phi _{\boldsymbol n}$ is the azimuthal angle of the normal vector  ${\boldsymbol n}$ of the surface oriented towards the fluid and
${\boldsymbol n}$ of the surface oriented towards the fluid and  $\zeta = {\rm sgn}(n_zV_{iz})$, where
$\zeta = {\rm sgn}(n_zV_{iz})$, where  $n_z$ is the vertical component of the normal vector and
$n_z$ is the vertical component of the normal vector and  $V_{iz}$ is the vertical component of the incident velocity. A similar expression was derived in Manders & Maas (Reference Manders and Maas2004) for wavevector angles in the context of plane wave reflection. In term of wave propagation directions, the reflection law has never been written in this form in the literature. We provide a derivation in Appendix A.
$V_{iz}$ is the vertical component of the incident velocity. A similar expression was derived in Manders & Maas (Reference Manders and Maas2004) for wavevector angles in the context of plane wave reflection. In term of wave propagation directions, the reflection law has never been written in this form in the literature. We provide a derivation in Appendix A.

Figure 1. Reflection of an inertial beam on an inclined surface. The incident and reflected beams are defined by their velocity vectors  ${\boldsymbol {V_i}}$ and
${\boldsymbol {V_i}}$ and  ${\boldsymbol {V_r}}$, and the surface by its normal vector
${\boldsymbol {V_r}}$, and the surface by its normal vector  ${\boldsymbol n}$ oriented toward the fluid. (a) Three-dimensional view; (b) projected view on the horizontal plane.
${\boldsymbol n}$ oriented toward the fluid. (a) Three-dimensional view; (b) projected view on the horizontal plane.
2.3. Geometry of the fluid domain
We consider the volume contained within a truncated elliptic cone defined by
 \begin{equation} x^2 + \frac{y^2}{b^2} \leq \frac{z^2}{\tan^2 \alpha} , \end{equation}
\begin{equation} x^2 + \frac{y^2}{b^2} \leq \frac{z^2}{\tan^2 \alpha} , \end{equation}
with  $\tan \alpha \leq z \leq \tan \alpha +H$. The angle
$\tan \alpha \leq z \leq \tan \alpha +H$. The angle  $\alpha$ is the angle made by the conical surface with respect to the horizontal in the
$\alpha$ is the angle made by the conical surface with respect to the horizontal in the  $x$-direction. The base of the cone always has a unit radius along the
$x$-direction. The base of the cone always has a unit radius along the  $x$-axis while it reaches
$x$-axis while it reaches  $b$ along the
$b$ along the  $y$-axis. Without loss of generality, we assume
$y$-axis. Without loss of generality, we assume  $b\geq 1$, so that the short axis is always along the
$b\geq 1$, so that the short axis is always along the  $x$-axis. As will become apparent later, the attractor will localise in that case onto the particular plane
$x$-axis. As will become apparent later, the attractor will localise in that case onto the particular plane  $(Oxz)$. The case
$(Oxz)$. The case  $b=1$ corresponds to the classical axisymmetric truncated cone geometry. This type of axisymmetric geometry involving a truncated conical surface, sometimes called a frustum, has already been studied previously (Beardsley Reference Beardsley1970; Henderson & Aldridge Reference Henderson and Aldridge1992; Borcia & Harlander Reference Borcia and Harlander2013; Klein et al. Reference Klein, Seelig, Kurgansky, Ghasemi, Borcia, Will, Schaller, Egbers and Harlander2014; Sibgatullin et al. Reference Sibgatullin, Xu, Tretyakov and Ermanyuk2019; Pacary et al. Reference Pacary, Dauxois, Ermanyuk, Metz, Moulin and Joubaud2023). The novelty of our study is to extend the linear wave dynamics to the case of non-axisymmetric domains, which correspond in our case to
$b=1$ corresponds to the classical axisymmetric truncated cone geometry. This type of axisymmetric geometry involving a truncated conical surface, sometimes called a frustum, has already been studied previously (Beardsley Reference Beardsley1970; Henderson & Aldridge Reference Henderson and Aldridge1992; Borcia & Harlander Reference Borcia and Harlander2013; Klein et al. Reference Klein, Seelig, Kurgansky, Ghasemi, Borcia, Will, Schaller, Egbers and Harlander2014; Sibgatullin et al. Reference Sibgatullin, Xu, Tretyakov and Ermanyuk2019; Pacary et al. Reference Pacary, Dauxois, Ermanyuk, Metz, Moulin and Joubaud2023). The novelty of our study is to extend the linear wave dynamics to the case of non-axisymmetric domains, which correspond in our case to  $b>1$. Although theoretical results will be derived for any values of
$b>1$. Although theoretical results will be derived for any values of  $H$ and
$H$ and  $\alpha$, the numerical investigations will focus on the particular parameters
$\alpha$, the numerical investigations will focus on the particular parameters  $H=1$ and
$H=1$ and  $\alpha ={\rm \pi} /4$ and consider super-critical slopes only for which
$\alpha ={\rm \pi} /4$ and consider super-critical slopes only for which  $\theta <\alpha$.
$\theta <\alpha$.
3. Ray tracing and local analysis
In this section, we discuss the properties of the 3-D ray paths satisfying the reflection laws discussed above. We start by discussing the axisymmetric case ( $b=1$) before considering ray paths in the non-axisymmetric geometry (
$b=1$) before considering ray paths in the non-axisymmetric geometry ( $b>1$).
$b>1$).
3.1. Axisymmetric truncated cone
In this section, we consider the case  $b=1$ in (2.5), which corresponds to an axisymmetric truncated cone. This geometry has recently been considered in Pacary et al. (Reference Pacary, Dauxois, Ermanyuk, Metz, Moulin and Joubaud2023). It corresponds to the axisymmetric version of the 2-D trapezoidal geometry that has been studied in numerous works, as described in the introduction. Owing to the axisymmetry, the normal vector of the conical surface is always oriented toward the axis of symmetry
$b=1$ in (2.5), which corresponds to an axisymmetric truncated cone. This geometry has recently been considered in Pacary et al. (Reference Pacary, Dauxois, Ermanyuk, Metz, Moulin and Joubaud2023). It corresponds to the axisymmetric version of the 2-D trapezoidal geometry that has been studied in numerous works, as described in the introduction. Owing to the axisymmetry, the normal vector of the conical surface is always oriented toward the axis of symmetry  $Oz$. This implies that, if a ray is oriented towards this axis, it reaches the conical surface with a meridional angle
$Oz$. This implies that, if a ray is oriented towards this axis, it reaches the conical surface with a meridional angle  $\phi _i = \phi _{\boldsymbol n}+ {\rm \pi}$, and reflects with an angle
$\phi _i = \phi _{\boldsymbol n}+ {\rm \pi}$, and reflects with an angle  $\phi _r =\phi _{\boldsymbol n}$ as prescribed by (2.4). It therefore continues to be oriented towards the axis. This means that, if a ray initially lies within a meridional plane, it remains confined to this plane forever as in a 2-D geometry.
$\phi _r =\phi _{\boldsymbol n}$ as prescribed by (2.4). It therefore continues to be oriented towards the axis. This means that, if a ray initially lies within a meridional plane, it remains confined to this plane forever as in a 2-D geometry.
The ray paths confined within a particular meridional 2-D plane of the axisymmetric cone, which is equivalent to a 2-D trapezoid, have been analysed in many papers (Maas & Lam Reference Maas and Lam1995; Maas et al. Reference Maas, Benielli, Sommeria and Lam1997; Grisouard et al. Reference Grisouard, Staquet and Pairaud2008; Brunet, Dauxois & Cortet Reference Brunet, Dauxois and Cortet2019; Pacary et al. Reference Pacary, Dauxois, Ermanyuk, Metz, Moulin and Joubaud2023). They converge towards attractors owing to the focusing effect resulting from the reflection along the conical slope. This is illustrated in figure 2(a), where we show two ray paths converging towards an attractor for the particular case  $\omega =0.8$,
$\omega =0.8$,  $H=1$ and
$H=1$ and  $\tan \alpha =1$. This particular attractor (shown in red in figure 2a) is composed of two symmetrical quadrangles and is the simplest attractor (with the lowest number of reflections) that can be obtained in this geometry. It exists for
$\tan \alpha =1$. This particular attractor (shown in red in figure 2a) is composed of two symmetrical quadrangles and is the simplest attractor (with the lowest number of reflections) that can be obtained in this geometry. It exists for  $\alpha > \theta$ (i.e. when the reflection on the sloping boundary is supercritical) and in a finite range of parameters that can be obtained by finding the coordinates of the reflection points. For instance, the points
$\alpha > \theta$ (i.e. when the reflection on the sloping boundary is supercritical) and in a finite range of parameters that can be obtained by finding the coordinates of the reflection points. For instance, the points  $(\pm x_a,z_a)$, where the attractor reflects on the inclined boundary (see figure 6 below), can be expressed in terms of the angles
$(\pm x_a,z_a)$, where the attractor reflects on the inclined boundary (see figure 6 below), can be expressed in terms of the angles  $\alpha$ and
$\alpha$ and  $\theta$ and the height
$\theta$ and the height  $H$ as
$H$ as
 \begin{equation} x_a = \frac{H}{\tan\theta} ,\quad z_a = \frac{H \tan \alpha}{\tan \theta} . \end{equation}
\begin{equation} x_a = \frac{H}{\tan\theta} ,\quad z_a = \frac{H \tan \alpha}{\tan \theta} . \end{equation}
Writing the condition that  $z_a$ is between
$z_a$ is between  $\tan \alpha$ and
$\tan \alpha$ and  $\tan \alpha + H$, implies the following condition:
$\tan \alpha + H$, implies the following condition:
 \begin{equation} \tan \theta < H < \frac{\tan\alpha \tan\theta}{\tan \alpha - \tan \theta} . \end{equation}
\begin{equation} \tan \theta < H < \frac{\tan\alpha \tan\theta}{\tan \alpha - \tan \theta} . \end{equation}
This condition can be written in term of the frequency  $\omega =\cos \theta$ as
$\omega =\cos \theta$ as
 \begin{equation} \frac{1}{\sqrt{1 + H^2} }< \omega <\frac{\tan\alpha + H}{\sqrt{ (\tan\alpha + H)^2 + H^2\tan^2\alpha}}, \end{equation}
\begin{equation} \frac{1}{\sqrt{1 + H^2} }< \omega <\frac{\tan\alpha + H}{\sqrt{ (\tan\alpha + H)^2 + H^2\tan^2\alpha}}, \end{equation}
which defines the frequency range for which this type of attractor exists. For the parameters used in figure 2 ( $H=1$ and
$H=1$ and  $\tan \alpha =1$), it corresponds to the interval
$\tan \alpha =1$), it corresponds to the interval  $1/\sqrt {2}< \omega < 2 \sqrt {5}$. This interval can be seen in figure 2(b), where we show the positions on the
$1/\sqrt {2}< \omega < 2 \sqrt {5}$. This interval can be seen in figure 2(b), where we show the positions on the  $x$-axis of each reflection (after a large number of reflections in order to focus on the attractor path) for many random initial conditions uniformly distributed across the surface and as a function of frequency. There are no attractors for frequencies below
$x$-axis of each reflection (after a large number of reflections in order to focus on the attractor path) for many random initial conditions uniformly distributed across the surface and as a function of frequency. There are no attractors for frequencies below  $\omega <1/\sqrt {2}$. The relatively empty regions for these low frequencies correspond to rays trapped in the upper corners. For
$\omega <1/\sqrt {2}$. The relatively empty regions for these low frequencies correspond to rays trapped in the upper corners. For  $\omega >2/\sqrt {5}$, other attractors are still observed but they are now characterised by a more complex path involving multiple reflections on each of the boundaries. In the following, we will focus on the simpler attractor observed for frequencies satisfying the conditions (3.3).
$\omega >2/\sqrt {5}$, other attractors are still observed but they are now characterised by a more complex path involving multiple reflections on each of the boundaries. In the following, we will focus on the simpler attractor observed for frequencies satisfying the conditions (3.3).
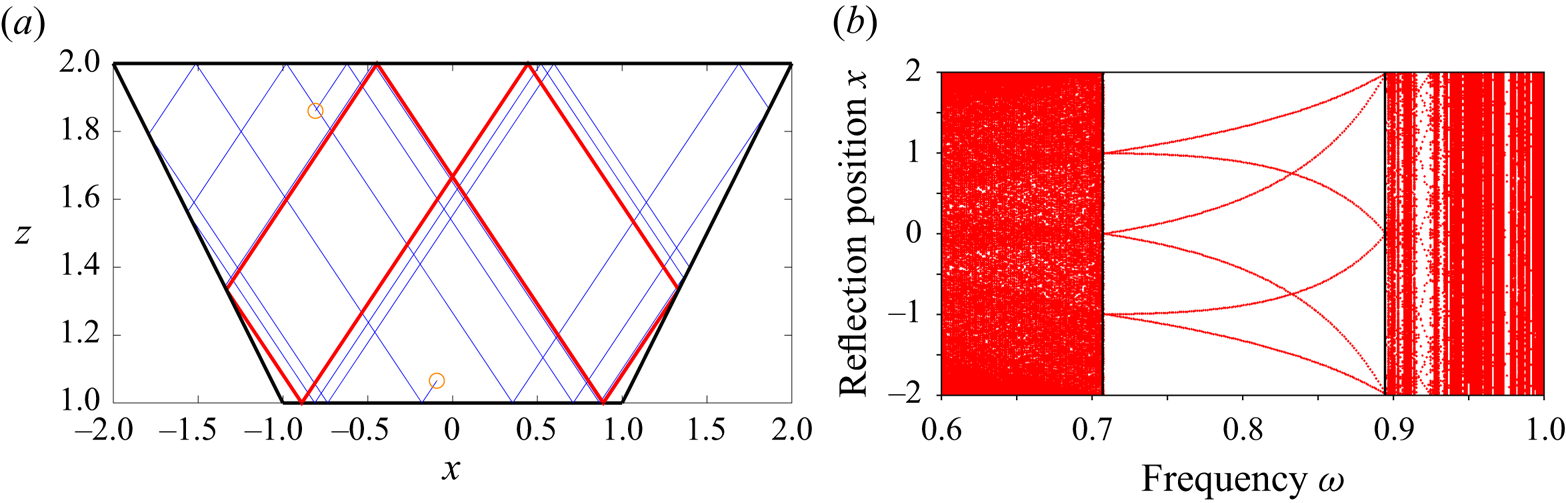
Figure 2. (a) Two-dimensional ray paths for two particular trajectories starting from the orange empty circles and for  $\omega =0.8$. The red path corresponds to the last half of the many reflections and shows the final attractor. (b) Position of each reflection along the
$\omega =0.8$. The red path corresponds to the last half of the many reflections and shows the final attractor. (b) Position of each reflection along the  $x$ axis of the last few reflections as a function of
$x$ axis of the last few reflections as a function of  $\omega$. The two vertical lines correspond to
$\omega$. The two vertical lines correspond to  $\omega =1/\sqrt {2}$ and
$\omega =1/\sqrt {2}$ and  $\omega =2/\sqrt {5}$.
$\omega =2/\sqrt {5}$.
If we now authorise the ray beams to deviate from a particular meridional plane, their path becomes more complex. One has to monitor the horizontal angle  $\phi$ of the direction of the ray and the meridional angle
$\phi$ of the direction of the ray and the meridional angle  $\psi$ of the position where it reflects on the boundaries (see figure 6b below). This problem has been recently studied in Pacary et al. (Reference Pacary, Dauxois, Ermanyuk, Metz, Moulin and Joubaud2023) for this particular geometry (see also § 7 in Maas Reference Maas2005). They showed that the 2-D attractor is still obtained but its location along the azimuthal direction is now dependent on the choice of initial conditions. This phenomenon is illustrated in figure 3, where we show that two rays emitted from the same location with different initial horizontal angles of propagation
$\psi$ of the position where it reflects on the boundaries (see figure 6b below). This problem has been recently studied in Pacary et al. (Reference Pacary, Dauxois, Ermanyuk, Metz, Moulin and Joubaud2023) for this particular geometry (see also § 7 in Maas Reference Maas2005). They showed that the 2-D attractor is still obtained but its location along the azimuthal direction is now dependent on the choice of initial conditions. This phenomenon is illustrated in figure 3, where we show that two rays emitted from the same location with different initial horizontal angles of propagation  $\phi$ end on the same 2-D attractor but in different meridional planes. However, the geometry being azimuthally invariant, all the meridional planes are possible and should be obtained with the same probability. A fully axisymmetric attractor would then be obtained (with a non-uniform distribution of trapping planes though, see Maas Reference Maas2005) if all the possible initial conditions were simultaneously considered (with the exception of whispering gallery modes (Pillet et al. Reference Pillet, Maas and Dauxois2019) which we did not observe here). More details can be found in Pacary (Reference Pacary2023) and Pacary et al. (Reference Pacary, Dauxois, Ermanyuk, Metz, Moulin and Joubaud2023), where such an axisymmetric system is explored using both ray tracing and experiments.
$\phi$ end on the same 2-D attractor but in different meridional planes. However, the geometry being azimuthally invariant, all the meridional planes are possible and should be obtained with the same probability. A fully axisymmetric attractor would then be obtained (with a non-uniform distribution of trapping planes though, see Maas Reference Maas2005) if all the possible initial conditions were simultaneously considered (with the exception of whispering gallery modes (Pillet et al. Reference Pillet, Maas and Dauxois2019) which we did not observe here). More details can be found in Pacary (Reference Pacary2023) and Pacary et al. (Reference Pacary, Dauxois, Ermanyuk, Metz, Moulin and Joubaud2023), where such an axisymmetric system is explored using both ray tracing and experiments.

Figure 3. Ray path for two particular trajectories initialised at the same point indicated by the empty circle. The two trajectories differ only by the initial horizontal angle of propagation. The thin lines correspond to the transient propagation while the thick lines correspond to the final limit cycle after many reflections. The conical surface is coloured in light grey to distinguish it from the horizontal planes. The height of the cone is  $H=1$, its opening angle is
$H=1$, its opening angle is  $\tan \alpha =1$ and the frequency is
$\tan \alpha =1$ and the frequency is  $\omega =0.8$. (a) Side view. (b) View from the top. A movie (Movie 1) showing the propagation of many randomly initialised rays can be found in the Supplementary materials available at https://doi.org/10.1017/jfm.2024.5.
$\omega =0.8$. (a) Side view. (b) View from the top. A movie (Movie 1) showing the propagation of many randomly initialised rays can be found in the Supplementary materials available at https://doi.org/10.1017/jfm.2024.5.
3.2. Elliptic cone
In this section, we consider the unexplored case  $b>1$ in (2.5) which corresponds to a truncated elliptic cone. As the axisymmetry is now broken, we do not expect the presence of any axisymmetric attractor. In the following, we focus on the case where the reflection on the conical surface remains supercritical, which leads to the following upper bound on
$b>1$ in (2.5) which corresponds to a truncated elliptic cone. As the axisymmetry is now broken, we do not expect the presence of any axisymmetric attractor. In the following, we focus on the case where the reflection on the conical surface remains supercritical, which leads to the following upper bound on  $b$:
$b$:
 \begin{equation} b< b_c=\frac{\tan\alpha}{\tan\theta} . \end{equation}
\begin{equation} b< b_c=\frac{\tan\alpha}{\tan\theta} . \end{equation} The first effect of the elliptic deformation is to modify the orientation of the normal vector of the conical surface. Except in the vertical planes  $x=0$ and
$x=0$ and  $y=0$ corresponding to the directions of the principal axes of the elliptic cone, the normal vector to the cone is no longer oriented towards the vertical rotation axis. This means that, contrary to the axisymmetric case, no ray can stay trapped in a particular meridional plane apart from the planes
$y=0$ corresponding to the directions of the principal axes of the elliptic cone, the normal vector to the cone is no longer oriented towards the vertical rotation axis. This means that, contrary to the axisymmetric case, no ray can stay trapped in a particular meridional plane apart from the planes  $x=0$ and
$x=0$ and  $y=0$. When a ray is initialised inside any other meridional plane, it deviates from it after its first reflection on the conical surface. Whether the planes
$y=0$. When a ray is initialised inside any other meridional plane, it deviates from it after its first reflection on the conical surface. Whether the planes  $x=0$ and
$x=0$ and  $y=0$ are an stable or unstable equilibrium will be discussed below.
$y=0$ are an stable or unstable equilibrium will be discussed below.
We first repeat the ray tracing experiment done previously for  $b=1$ but in a non-axisymmetric geometry with
$b=1$ but in a non-axisymmetric geometry with  $b=1.2$. The same frequency
$b=1.2$. The same frequency  $\omega =0.8$ is considered. An example is shown in figure 4, where two ray paths are generated from the same initial position but with different horizontal angles. We observe that the two ray paths now converge towards the same unique attractor localised in the plane
$\omega =0.8$ is considered. An example is shown in figure 4, where two ray paths are generated from the same initial position but with different horizontal angles. We observe that the two ray paths now converge towards the same unique attractor localised in the plane  $y=0$ containing the semi-minor axis of the elliptic cone. One can repeat the experiment for many initial positions and horizontal angles
$y=0$ containing the semi-minor axis of the elliptic cone. One can repeat the experiment for many initial positions and horizontal angles  $\phi$ showing that all rays eventually end up in this particular plane
$\phi$ showing that all rays eventually end up in this particular plane  $y=0$ and along the same limit cycle. For this particular case, it thus seems that the plane
$y=0$ and along the same limit cycle. For this particular case, it thus seems that the plane  $y=0$ is a stable equilibrium while the plane
$y=0$ is a stable equilibrium while the plane  $x=0$ is unstable. This is further confirmed in figure 5, where we show the positions
$x=0$ is unstable. This is further confirmed in figure 5, where we show the positions  $x$ and
$x$ and  $y$ of the reflection points of the limit cycle (obtained by considering the last ten iterations of a total of five hundred) for many frequencies and many random initial conditions. We compare the axisymmetric case
$y$ of the reflection points of the limit cycle (obtained by considering the last ten iterations of a total of five hundred) for many frequencies and many random initial conditions. We compare the axisymmetric case  $b=1$ in figure 5(a) with the elliptic case
$b=1$ in figure 5(a) with the elliptic case  $b=1.2$ in figure 5(b). The thin lines indicate the
$b=1.2$ in figure 5(b). The thin lines indicate the  $x$ coordinates of the six reflection points of the 2-D attractor path, as already shown in figure 2(b), in the particular plane
$x$ coordinates of the six reflection points of the 2-D attractor path, as already shown in figure 2(b), in the particular plane  $y=0$ which is the same for all ellipticities
$y=0$ which is the same for all ellipticities  $b$ in our case. For the axisymmetric case, each independent ray path converges towards a similar 2-D attractor in a particular meridional plane, depending on its initial conditions, leading to a dense pattern of reflection points when plotting their
$b$ in our case. For the axisymmetric case, each independent ray path converges towards a similar 2-D attractor in a particular meridional plane, depending on its initial conditions, leading to a dense pattern of reflection points when plotting their  $(x,y)$ coordinates. Note that the projection from the axisymmetric domain to the arbitrary coordinates
$(x,y)$ coordinates. Note that the projection from the axisymmetric domain to the arbitrary coordinates  $x$ and
$x$ and  $y$ leads to a non-uniform density of reflection points which tend to accumulate close to the expected positions of the 2-D attractors (shown by the thin lines). For the non-axisymmetric case
$y$ leads to a non-uniform density of reflection points which tend to accumulate close to the expected positions of the 2-D attractors (shown by the thin lines). For the non-axisymmetric case  $b=1.2$, however, all the rays converge towards the particular plane
$b=1.2$, however, all the rays converge towards the particular plane  $y=0$, regardless of their initial conditions in terms of position and initial horizontal angle, while we recover the same attractor structure as in two dimensions when considering the
$y=0$, regardless of their initial conditions in terms of position and initial horizontal angle, while we recover the same attractor structure as in two dimensions when considering the  $x$ coordinates. Note that we recover this peculiar property for all frequencies within the attractor range given by (3.3).
$x$ coordinates. Note that we recover this peculiar property for all frequencies within the attractor range given by (3.3).

Figure 4. Same as figure 3 but for a non-axisymmetric domain with  $b=1.2$ in (2.5). The other parameters are
$b=1.2$ in (2.5). The other parameters are  $\omega =0.8$,
$\omega =0.8$,  $H=1$ and
$H=1$ and  $\tan \alpha =1$. (a) Side view in the
$\tan \alpha =1$. (a) Side view in the  $(y,z)$ plane. (b) Side view in the
$(y,z)$ plane. (b) Side view in the  $(x,z)$ plane. (c) Three-dimensional view. (d) Top view in the
$(x,z)$ plane. (c) Three-dimensional view. (d) Top view in the  $(x,y)$ plane. A movie (Movie 2) showing the propagation of many randomly initialised rays can be found in the Supplementary materials available at https://doi.org/10.1017/jfm.2024.5.
$(x,y)$ plane. A movie (Movie 2) showing the propagation of many randomly initialised rays can be found in the Supplementary materials available at https://doi.org/10.1017/jfm.2024.5.

Figure 5. Positions of the reflection points along the  $x$ axis in red and along the
$x$ axis in red and along the  $y$ axis in blue for the final limit cycle obtained from many random initial conditions. (a) Axisymmetric case
$y$ axis in blue for the final limit cycle obtained from many random initial conditions. (a) Axisymmetric case  $b=1$ and (b) elliptic case
$b=1$ and (b) elliptic case  $b=1.2$. The cone height is
$b=1.2$. The cone height is  $H=1$ and its opening angle is
$H=1$ and its opening angle is  $\tan \alpha =1$. The graph focuses on the frequency range defined by (3.3). The thin lines correspond to the analytical position of the six reflection points of the 2-D attractor.
$\tan \alpha =1$. The graph focuses on the frequency range defined by (3.3). The thin lines correspond to the analytical position of the six reflection points of the 2-D attractor.
The attractor in the particular plane  $y=0$ seems to attract all the rays, regardless of their initial positions within the volume, with the exception of rays initialised within the
$y=0$ seems to attract all the rays, regardless of their initial positions within the volume, with the exception of rays initialised within the  $x=0$ plane, which is also an equilibrium, albeit unstable. Contrary to the axisymmetric case, there is a second azimuthal convergence (related to the varying curvature of the elliptic cone along the azimuthal direction) in addition to the meridional convergence at the origin of the classical 2-D attractor (related to the inclination of the conical surface). For this reason, we call this final limit cycle a ‘super-attractor’, to differentiate it from the classical attractor surface observed in the axisymmetric case. The super-attractor results from a convergence of rays in both axial and azimuthal directions while there is no azimuthal convergence for an attractor in an axisymmetric geometry, as its azimuthal position depends on the initial position and horizontal angle of propagation.
$x=0$ plane, which is also an equilibrium, albeit unstable. Contrary to the axisymmetric case, there is a second azimuthal convergence (related to the varying curvature of the elliptic cone along the azimuthal direction) in addition to the meridional convergence at the origin of the classical 2-D attractor (related to the inclination of the conical surface). For this reason, we call this final limit cycle a ‘super-attractor’, to differentiate it from the classical attractor surface observed in the axisymmetric case. The super-attractor results from a convergence of rays in both axial and azimuthal directions while there is no azimuthal convergence for an attractor in an axisymmetric geometry, as its azimuthal position depends on the initial position and horizontal angle of propagation.
3.2.1. Local analysis of the super-attractor
In this section, we analyse the local properties of the super-attractor. Our objective is to confirm the attracting character of the super-attractor both towards a particular limit cycle in the meridional plane and towards a particular meridional plane, regardless of initial conditions. While the first property is shared with regular attractors, we show that the second is specific to super-attractors. We aim to obtain an analytic expression for the attraction rate (i.e. Lyapunov coefficient) as a function of the geometrical parameters.
We focus on the super-attractor which is made of two symmetrical quadrangles, as illustrated in figure 2(a). This 2-D attractor has been studied in § 3.1. It exists in the plane  $x=0$ for frequencies in the interval defined in (3.3). The points
$x=0$ for frequencies in the interval defined in (3.3). The points  $(\pm x_a,0,z_a)$ where reflection occurs has been given in (3.1a,b).
$(\pm x_a,0,z_a)$ where reflection occurs has been given in (3.1a,b).
We now want to analyse the behaviour of a ray close to the attractor. We consider a ray emitted from a point  $(x_0,y_0,z_0)$ on the inclined surface close to
$(x_0,y_0,z_0)$ on the inclined surface close to  $(x_a,0,z_a)$. This ray is emitted downward with a vertical angle
$(x_a,0,z_a)$. This ray is emitted downward with a vertical angle  $\varphi _0 = {\rm \pi}/2 + \theta$ and an azimuthal angle
$\varphi _0 = {\rm \pi}/2 + \theta$ and an azimuthal angle  $\phi _0$ as illustrated in figure 6. If this ray is not too far from the attractor, it first reflects on the lower plane surface, then reflects on the upper plane surface before reaching the inclined surface on the other side in a point
$\phi _0$ as illustrated in figure 6. If this ray is not too far from the attractor, it first reflects on the lower plane surface, then reflects on the upper plane surface before reaching the inclined surface on the other side in a point  $(x_1,y_1,z_1)$ close to
$(x_1,y_1,z_1)$ close to  $(-x_a,0,z_a)$. Both points
$(-x_a,0,z_a)$. Both points  $(x_0,y_0,z_0)$ and
$(x_0,y_0,z_0)$ and  $(x_1,y_1,z_1)$ are on the cone defined by (2.5) so their horizontal coordinates can be written as
$(x_1,y_1,z_1)$ are on the cone defined by (2.5) so their horizontal coordinates can be written as
 $$\begin{gather} x_0 = z_0 \frac{\cos \psi_0 }{\tan \alpha} ,\quad y_0 = b z_0 \frac{\sin \psi_0 }{\tan \alpha} , \end{gather}$$
$$\begin{gather} x_0 = z_0 \frac{\cos \psi_0 }{\tan \alpha} ,\quad y_0 = b z_0 \frac{\sin \psi_0 }{\tan \alpha} , \end{gather}$$ $$\begin{gather}x_1 = z_1 \frac{\cos \psi_1 }{\tan \alpha} ,\quad y_1 = b z_1 \frac{\sin \psi_1 }{\tan \alpha} , \end{gather}$$
$$\begin{gather}x_1 = z_1 \frac{\cos \psi_1 }{\tan \alpha} ,\quad y_1 = b z_1 \frac{\sin \psi_1 }{\tan \alpha} , \end{gather}$$
where  $\psi _0$ and
$\psi _0$ and  $\psi _1$ are their azimuthal angles (see figure 6b).
$\psi _1$ are their azimuthal angles (see figure 6b).

Figure 6. (a) Perspective view of the elliptic cone in thick solid line. The attractor is indicated by the red line. The cone is twice symmetrically duplicated to avoid considering the reflections on the horizontal planes. (b) View from the top of a ray emitted close to the attractor. The red dashed lines indicate the section of the cone at the altitude  $z_a$ of the attractor. The ray emitted from the point
$z_a$ of the attractor. The ray emitted from the point  $(x_0,y_0,z_0)$ with a horizontal angle
$(x_0,y_0,z_0)$ with a horizontal angle  $\phi _0$ is reflected at
$\phi _0$ is reflected at  $(x_1,y_1,z_1)$ with the angle
$(x_1,y_1,z_1)$ with the angle  $\phi _1$.
$\phi _1$.
As the reflections on the plane surfaces do not modify the azimuthal angle of the ray (see (2.4) for the particular case  $\alpha =0$), the coordinates of the point
$\alpha =0$), the coordinates of the point  $(x_1,y_1,z_1)$ can be obtained by continuing the ray in horizontal mirror images of the cones. Such a ray reaches the boundary of the second cone image in a point which has just been shifted vertically by twice the height of the cone, that is in
$(x_1,y_1,z_1)$ can be obtained by continuing the ray in horizontal mirror images of the cones. Such a ray reaches the boundary of the second cone image in a point which has just been shifted vertically by twice the height of the cone, that is in  $(x_1,y_1,z_1-2H)$ (see figure 6). This property means that there exists
$(x_1,y_1,z_1-2H)$ (see figure 6). This property means that there exists  $\lambda$ such that
$\lambda$ such that
 $$\begin{gather} x_1 = x_0 - \lambda \cos \theta \cos \phi_0 , \end{gather}$$
$$\begin{gather} x_1 = x_0 - \lambda \cos \theta \cos \phi_0 , \end{gather}$$ $$\begin{gather}y_1 = y_0 - \lambda \cos \theta \sin \phi_0 , \end{gather}$$
$$\begin{gather}y_1 = y_0 - \lambda \cos \theta \sin \phi_0 , \end{gather}$$ $$\begin{gather}z_1 -2H = z_0 + \lambda \sin\theta . \end{gather}$$
$$\begin{gather}z_1 -2H = z_0 + \lambda \sin\theta . \end{gather}$$ When the ray is close to the attractor,  $(x_0,y_0,z_0)$ and
$(x_0,y_0,z_0)$ and  $(x_1,y_1,z_1)$ are assumed to be close to
$(x_1,y_1,z_1)$ are assumed to be close to  $(x_a,0,z_a)$ and
$(x_a,0,z_a)$ and  $(-x_a,0,z_a)$, respectively. Moreover,
$(-x_a,0,z_a)$, respectively. Moreover,  $\psi _0$ is assumed to be small, and
$\psi _0$ is assumed to be small, and  $\phi _0$ and
$\phi _0$ and  $\psi _0$ are close to
$\psi _0$ are close to  ${\rm \pi}$. At first order, (3.5) give for the relative distances
${\rm \pi}$. At first order, (3.5) give for the relative distances
 $$\begin{gather} \delta x_0 \sim \frac{\delta z_0 }{\tan \alpha} ,\quad \delta y_0 \sim b z_a \frac{ \psi_0 }{\tan \alpha} , \end{gather}$$
$$\begin{gather} \delta x_0 \sim \frac{\delta z_0 }{\tan \alpha} ,\quad \delta y_0 \sim b z_a \frac{ \psi_0 }{\tan \alpha} , \end{gather}$$ $$\begin{gather}\delta x_1 \sim{-} \frac{\delta z_1 }{\tan \alpha} ,\quad \delta y_1 \sim{-} b z_a \frac{ (\psi_1 - {\rm \pi}) }{\tan \alpha} . \end{gather}$$
$$\begin{gather}\delta x_1 \sim{-} \frac{\delta z_1 }{\tan \alpha} ,\quad \delta y_1 \sim{-} b z_a \frac{ (\psi_1 - {\rm \pi}) }{\tan \alpha} . \end{gather}$$
From (3.6c), one gets  $\lambda$ as
$\lambda$ as
 \begin{equation} \lambda \sim \frac{-2H + \delta z_1 -\delta z_0}{\sin\theta}. \end{equation}
\begin{equation} \lambda \sim \frac{-2H + \delta z_1 -\delta z_0}{\sin\theta}. \end{equation}Inserting this expression in (3.6a), one obtains, using (3.7a,b), that
 \begin{equation} \delta x_1 \sim{-} K \delta x_0 ,\quad \delta z_1 \sim K \delta z_0 , \end{equation}
\begin{equation} \delta x_1 \sim{-} K \delta x_0 ,\quad \delta z_1 \sim K \delta z_0 , \end{equation}with
 \begin{equation} K = \frac{\tan \alpha - \tan \theta}{\tan\alpha + \tan \theta} = \frac{\sin(\alpha- \theta)}{\sin(\alpha+\theta)} , \end{equation}
\begin{equation} K = \frac{\tan \alpha - \tan \theta}{\tan\alpha + \tan \theta} = \frac{\sin(\alpha- \theta)}{\sin(\alpha+\theta)} , \end{equation}which corresponds to the 2-D contraction factor of the attractor.
In (3.5b), we obtain
 \begin{equation} \delta y_1 \sim \delta y_0 - \frac{2 H (\phi_0 -{\rm \pi})}{\tan\theta} , \end{equation}
\begin{equation} \delta y_1 \sim \delta y_0 - \frac{2 H (\phi_0 -{\rm \pi})}{\tan\theta} , \end{equation}which gives a first relation between the angles
 \begin{equation} \psi _1 - {\rm \pi}={-}\psi _0 + \frac{2 }{b} (\phi_0 - {\rm \pi}) . \end{equation}
\begin{equation} \psi _1 - {\rm \pi}={-}\psi _0 + \frac{2 }{b} (\phi_0 - {\rm \pi}) . \end{equation} A second relation that expresses the angle  $\phi _1$ of the reflected ray in terms of
$\phi _1$ of the reflected ray in terms of  $\phi _0$ and
$\phi _0$ and  $\psi _0$ is obtained by applying the condition of reflection (2.4) at
$\psi _0$ is obtained by applying the condition of reflection (2.4) at  $(x_1,y_1,z_1)$. Close to the attractor, the azimuthal angle
$(x_1,y_1,z_1)$. Close to the attractor, the azimuthal angle  $\phi _{\boldsymbol n}$ of the normal vector
$\phi _{\boldsymbol n}$ of the normal vector  ${\boldsymbol n}$ is given at leading order by
${\boldsymbol n}$ is given at leading order by
 \begin{equation} \phi_{\boldsymbol n} \sim \frac{(\psi_1 - {\rm \pi})}{b} . \end{equation}
\begin{equation} \phi_{\boldsymbol n} \sim \frac{(\psi_1 - {\rm \pi})}{b} . \end{equation}
The normal vector  ${\boldsymbol n}$ and the incident rays are oppositely oriented with respect to the vertical, so
${\boldsymbol n}$ and the incident rays are oppositely oriented with respect to the vertical, so  $\zeta ={\rm sgn}(n_z V_{iz}) = -1$. Expression (2.4) then gives, for small angles,
$\zeta ={\rm sgn}(n_z V_{iz}) = -1$. Expression (2.4) then gives, for small angles,
 \begin{equation} \phi_1 - \phi_{\boldsymbol n} \sim{-}\frac{\tan \alpha - \tan \theta}{\tan\alpha + \tan \theta} (\phi_0 - {\rm \pi}- \phi_{\boldsymbol n}) ={-} K (\phi _0 -{\rm \pi} -\phi_{\boldsymbol n}) . \end{equation}
\begin{equation} \phi_1 - \phi_{\boldsymbol n} \sim{-}\frac{\tan \alpha - \tan \theta}{\tan\alpha + \tan \theta} (\phi_0 - {\rm \pi}- \phi_{\boldsymbol n}) ={-} K (\phi _0 -{\rm \pi} -\phi_{\boldsymbol n}) . \end{equation}Using (3.12) and (3.13), this expression finally reduces to
 \begin{equation} \phi_1 \sim{-}\frac{1+K}{b} \psi_0 + \left(\frac{2(1+K)}{b^2} - K\right) (\phi_0 - {\rm \pi}) . \end{equation}
\begin{equation} \phi_1 \sim{-}\frac{1+K}{b} \psi_0 + \left(\frac{2(1+K)}{b^2} - K\right) (\phi_0 - {\rm \pi}) . \end{equation}Expressions (3.12) and (3.15) can be written as
 \begin{equation} \boldsymbol{\varPsi}_{\!1} = \boldsymbol{\mathcal{M}} \boldsymbol{\varPsi}_{\!0}, \end{equation}
\begin{equation} \boldsymbol{\varPsi}_{\!1} = \boldsymbol{\mathcal{M}} \boldsymbol{\varPsi}_{\!0}, \end{equation}
for the vectors  $\boldsymbol {\varPsi }_{\!1} = (\psi _1 - {\rm \pi}, \phi _1)^\top$ and
$\boldsymbol {\varPsi }_{\!1} = (\psi _1 - {\rm \pi}, \phi _1)^\top$ and  $\boldsymbol {\varPsi }_{\!0} = (\psi _0, \phi _0 -{\rm \pi} )^\top$ where the matrix
$\boldsymbol {\varPsi }_{\!0} = (\psi _0, \phi _0 -{\rm \pi} )^\top$ where the matrix  $\boldsymbol {\mathcal {M}}$ is
$\boldsymbol {\mathcal {M}}$ is
 \begin{equation} \boldsymbol{\mathcal{M}} = \left( \begin{array}{cc} -1 & 2/b \\ -(1+K)/b & 2(1+K)/b^2 - K \end{array} \right)\!. \end{equation}
\begin{equation} \boldsymbol{\mathcal{M}} = \left( \begin{array}{cc} -1 & 2/b \\ -(1+K)/b & 2(1+K)/b^2 - K \end{array} \right)\!. \end{equation}
The operation can be repeated and after  $2N$ reflections on the cone boundary, that is
$2N$ reflections on the cone boundary, that is  $N$ cycles, we get
$N$ cycles, we get
 \begin{equation} \boldsymbol{\varPsi}_{\!2N} = \boldsymbol{\mathcal{M}}^{2N} \boldsymbol{\varPsi}_{\!0}, \end{equation}
\begin{equation} \boldsymbol{\varPsi}_{\!2N} = \boldsymbol{\mathcal{M}}^{2N} \boldsymbol{\varPsi}_{\!0}, \end{equation}
where  $\boldsymbol {\varPsi }_{\!2N} = (\psi _{2N}, \phi _{2N} - {\rm \pi})^\top$.
$\boldsymbol {\varPsi }_{\!2N} = (\psi _{2N}, \phi _{2N} - {\rm \pi})^\top$.
Introducing the eigenvalues  $\lambda _{\pm }$ and associated eigenvectors
$\lambda _{\pm }$ and associated eigenvectors  $\boldsymbol {\varPsi }_{\!\pm }$ of the matrix
$\boldsymbol {\varPsi }_{\!\pm }$ of the matrix  $\boldsymbol {\mathcal {M}}$, which are defined by
$\boldsymbol {\mathcal {M}}$, which are defined by
 $$\begin{gather} \lambda _{{\pm}} = \frac{(1+K)(2/b^2-1) \pm \left((1+K)^2 (2/b^2-1)^2 - 4~K\right)^{1/2}}{2}, \end{gather}$$
$$\begin{gather} \lambda _{{\pm}} = \frac{(1+K)(2/b^2-1) \pm \left((1+K)^2 (2/b^2-1)^2 - 4~K\right)^{1/2}}{2}, \end{gather}$$ $$\begin{gather}\boldsymbol{\varPsi}_{\!\pm} = (2/b, 1 + \lambda_{{\pm}})^\top , \end{gather}$$
$$\begin{gather}\boldsymbol{\varPsi}_{\!\pm} = (2/b, 1 + \lambda_{{\pm}})^\top , \end{gather}$$
 $\boldsymbol {\varPsi }_{\!2N}$ can be written as
$\boldsymbol {\varPsi }_{\!2N}$ can be written as
 \begin{equation} \boldsymbol{\varPsi}_{\!2N} = C_0 (\lambda _+)^{2N} \boldsymbol{\varPsi}_{\!+} + D_0 (\lambda _-)^{2N} \boldsymbol{\varPsi}_{\!-} , \end{equation}
\begin{equation} \boldsymbol{\varPsi}_{\!2N} = C_0 (\lambda _+)^{2N} \boldsymbol{\varPsi}_{\!+} + D_0 (\lambda _-)^{2N} \boldsymbol{\varPsi}_{\!-} , \end{equation}
where  $C_0$ and
$C_0$ and  $D_0$ are constants depending on the initial condition only
$D_0$ are constants depending on the initial condition only
 $$\begin{gather} C_0= \frac{2(\phi_0-{\rm \pi}) - b(1+\lambda_-)\psi_0}{2(\lambda_+ - \lambda_-)} , \end{gather}$$
$$\begin{gather} C_0= \frac{2(\phi_0-{\rm \pi}) - b(1+\lambda_-)\psi_0}{2(\lambda_+ - \lambda_-)} , \end{gather}$$ $$\begin{gather}D_0= \frac{2(\phi_0-{\rm \pi}) - b(1+\lambda_+)\psi_0}{2(\lambda_- - \lambda_+)} . \end{gather}$$
$$\begin{gather}D_0= \frac{2(\phi_0-{\rm \pi}) - b(1+\lambda_+)\psi_0}{2(\lambda_- - \lambda_+)} . \end{gather}$$ The functions  $\lambda _+$ and
$\lambda _+$ and  $\lambda _-$ characterise the behaviour of the angles
$\lambda _-$ characterise the behaviour of the angles  $\psi _{2N}$ and
$\psi _{2N}$ and  $\phi _{2N} -{\rm \pi}$ as a function of the cycle number
$\phi _{2N} -{\rm \pi}$ as a function of the cycle number  $N$. These angles go to zero if and only if
$N$. These angles go to zero if and only if  $|\lambda _\pm | <1$. This condition is here equivalent to
$|\lambda _\pm | <1$. This condition is here equivalent to  $b>1$ (since
$b>1$ (since  $0< K<1$). The functions
$0< K<1$). The functions  $\lambda _{\pm }$ depend on the value of
$\lambda _{\pm }$ depend on the value of  $b$ with respect to the particular values
$b$ with respect to the particular values
 \begin{equation} b_{c\pm} = \frac{\sqrt{2(1+K)}}{1\pm \sqrt{K}} . \end{equation}
\begin{equation} b_{c\pm} = \frac{\sqrt{2(1+K)}}{1\pm \sqrt{K}} . \end{equation} The two  $\lambda _\pm$ are real positive for
$\lambda _\pm$ are real positive for  $1< b< b_{c+}$, and real negative for
$1< b< b_{c+}$, and real negative for  $b>b_{c-}$. For
$b>b_{c-}$. For  $b_{c+}< b< b_{c-}$, they are complex conjugates with a constant absolute values equal to
$b_{c+}< b< b_{c-}$, they are complex conjugates with a constant absolute values equal to  $\sqrt {K}$. When
$\sqrt {K}$. When  $b=b_{c\pm }$, the solution evolves differently as shown in Appendix B.
$b=b_{c\pm }$, the solution evolves differently as shown in Appendix B.
3.2.2. Comparison between local analysis and numerical ray tracing
This section compares the prediction of the local analysis with that of the global ray tracing approach described above. To do so, we randomise the initial position inside the volume, the horizontal angle of propagation and the sign of the vertical velocity component. We then track the ray for  $10^4$ reflections on boundaries, which is enough to reach the attractor in most cases. The horizontal angle is computed at each reflection on the conical surface and for
$10^4$ reflections on boundaries, which is enough to reach the attractor in most cases. The horizontal angle is computed at each reflection on the conical surface and for  $x_i>0$ according to
$x_i>0$ according to  $\psi _{i}=\textrm {arg}(x_i+\textrm {i}y_i)=\textrm {atan2}(y_i,x_i)$, where
$\psi _{i}=\textrm {arg}(x_i+\textrm {i}y_i)=\textrm {atan2}(y_i,x_i)$, where  $(x_i,y_i)$ are the coordinates of the
$(x_i,y_i)$ are the coordinates of the  $i^{\textrm {th}}$ reflection point on the positive half
$i^{\textrm {th}}$ reflection point on the positive half  $x>0$ of the conical surface. The horizontal angle difference
$x>0$ of the conical surface. The horizontal angle difference  $\Delta \psi _i=|\psi _i-\psi _{i-1}|$ is then tracked as a function of the number of cycles. Note that we track the convergence of the horizontal angle after a complete cycle around the attractor for comparison with the prediction (3.19) of the local analysis presented in § 3.2.1. In that case, the analysis is performed on the number of cycles around the attractor and not on the number of reflections on the boundaries (there are 6 reflections on boundaries and 2 reflections on the conical surface per cycle for the particular attractor considered here).
$\Delta \psi _i=|\psi _i-\psi _{i-1}|$ is then tracked as a function of the number of cycles. Note that we track the convergence of the horizontal angle after a complete cycle around the attractor for comparison with the prediction (3.19) of the local analysis presented in § 3.2.1. In that case, the analysis is performed on the number of cycles around the attractor and not on the number of reflections on the boundaries (there are 6 reflections on boundaries and 2 reflections on the conical surface per cycle for the particular attractor considered here).
The evolution of the horizontal angle increment is typically characterised by a short transient followed by an exponential decay until machine accuracy is eventually reached and the ray becomes trapped in a particular plane. Some examples for  $\omega =0.8$,
$\omega =0.8$,  $H=1$,
$H=1$,  $\tan \alpha =1$ and three values of
$\tan \alpha =1$ and three values of  $b$ are shown in figure 7(a) to illustrate the convergence process. We observe that all rays converge towards the super-attractor at the same exponential rate, irrespective of the initial conditions. The duration of the transient before the ray effectively converges towards the attractor depends on the initial conditions and corresponds to the early reflections far from the final limit cycle. Note that for this particular case, the particular value of
$b$ are shown in figure 7(a) to illustrate the convergence process. We observe that all rays converge towards the super-attractor at the same exponential rate, irrespective of the initial conditions. The duration of the transient before the ray effectively converges towards the attractor depends on the initial conditions and corresponds to the early reflections far from the final limit cycle. Note that for this particular case, the particular value of  $b$ defined by (3.22) is
$b$ defined by (3.22) is  $b_{c+}=1.097$. Consistent with the theoretical prediction, we observe real values for the decay rate when
$b_{c+}=1.097$. Consistent with the theoretical prediction, we observe real values for the decay rate when  $b< b_{c+}$ (see the two cases
$b< b_{c+}$ (see the two cases  $b=1.02$ and
$b=1.02$ and  $b=1.05$ in figure 7a) and complex values when
$b=1.05$ in figure 7a) and complex values when  $b>b_{c+}$ (see the case
$b>b_{c+}$ (see the case  $b=1.2$).
$b=1.2$).

Figure 7. (a) Angle difference  $\Delta \psi _N= |\psi _N-\psi _{N-1}|$ in logarithmic scale as a function of the number of cycles
$\Delta \psi _N= |\psi _N-\psi _{N-1}|$ in logarithmic scale as a function of the number of cycles  $N$. We show 100 independent realisations with different initial conditions for each value of
$N$. We show 100 independent realisations with different initial conditions for each value of  $b$. (b) Decay rate
$b$. (b) Decay rate  $\sigma$ defined by
$\sigma$ defined by  $\Delta \psi _N\sim \exp (\sigma N)$ as a function of the long axis
$\Delta \psi _N\sim \exp (\sigma N)$ as a function of the long axis  $b$. Symbols correspond to the ray tracing approach while lines correspond to the linear local analysis (3.19). The upper branches correspond to
$b$. Symbols correspond to the ray tracing approach while lines correspond to the linear local analysis (3.19). The upper branches correspond to  $\sigma = \ln |\lambda _+|$ while the lower branches correspond to
$\sigma = \ln |\lambda _+|$ while the lower branches correspond to  $\sigma = \ln |\lambda _-|$. Note that the data for
$\sigma = \ln |\lambda _-|$. Note that the data for  $\omega =0.76$ stop because of the upper bound
$\omega =0.76$ stop because of the upper bound  $b_c\approx 1.17$ as given by (3.4).
$b_c\approx 1.17$ as given by (3.4).
A best fit  $\Delta \psi _N\sim \exp (\sigma N)$, where
$\Delta \psi _N\sim \exp (\sigma N)$, where  $N$ is the number of cycles, is computed in the range
$N$ is the number of cycles, is computed in the range  $10^{-14}<\Delta \psi _N<10^{-3}$ and averaged over
$10^{-14}<\Delta \psi _N<10^{-3}$ and averaged over  $10^3$ independent rays initialised randomly within the whole volume. Results are shown in figure 7(b). An excellent agreement between the local theoretical prediction and the ray tracing approach is observed for various values of
$10^3$ independent rays initialised randomly within the whole volume. Results are shown in figure 7(b). An excellent agreement between the local theoretical prediction and the ray tracing approach is observed for various values of  $b$ and three different frequencies within the attractor range. Interestingly, the decay rate is
$b$ and three different frequencies within the attractor range. Interestingly, the decay rate is  $\sigma =\ln |\lambda _-|=\ln |K|$ when
$\sigma =\ln |\lambda _-|=\ln |K|$ when  $b=1$ while it is smaller when
$b=1$ while it is smaller when  $b>1$. There is therefore a drastic difference between the case
$b>1$. There is therefore a drastic difference between the case  $b=1$, for which all rays converge rapidly toward a plane different for each ray, and the case
$b=1$, for which all rays converge rapidly toward a plane different for each ray, and the case  $b>1$, for which the convergence rate is smaller and actually tends to 0 when
$b>1$, for which the convergence rate is smaller and actually tends to 0 when  $b\rightarrow 1$. Although the breaking of the axisymmetry does create a globally attracting plane, as already discussed previously, the rate of convergence towards this unique plane increases with
$b\rightarrow 1$. Although the breaking of the axisymmetry does create a globally attracting plane, as already discussed previously, the rate of convergence towards this unique plane increases with  $b$ and is actually maximum once
$b$ and is actually maximum once  $b>b_{c+}$. In that case, it is actually half of that observed when
$b>b_{c+}$. In that case, it is actually half of that observed when  $b=1$.
$b=1$.
4. Numerical simulations of the linear viscous problem
Up to now, we have only discussed the properties of the ray paths which are only valid in the limit of vanishing Ekman numbers. The link between the properties of the ray paths and the actual viscous solution of the original linear Navier–Stokes equations (2.1) is not obvious. In this context, it is desirable to check whether the globally attracting solutions discussed in previous sections have any counterpart when considering the direct solution of (2.1).
To that end, we solve the linear viscous equations (2.1) using the spectral element solver Nek5000 (Fischer Reference Fischer1997; Deville, Fischer & Mund Reference Deville, Fischer and Mund2002). The domain is discretised using a number  $\mathcal {E}$ of hexahedral elements. Elements have been refined close to all boundaries to properly resolve viscous Ekman layers. The velocity is discretised within each element using Lagrange polynomial interpolants based on tensor-product arrays of Gauss–Lobatto–Legendre quadrature points. The polynomial order
$\mathcal {E}$ of hexahedral elements. Elements have been refined close to all boundaries to properly resolve viscous Ekman layers. The velocity is discretised within each element using Lagrange polynomial interpolants based on tensor-product arrays of Gauss–Lobatto–Legendre quadrature points. The polynomial order  $l_d$ of the expansion basis on each element is fixed to
$l_d$ of the expansion basis on each element is fixed to  $11$ in this study, while the number of elements goes up to
$11$ in this study, while the number of elements goes up to  $\mathcal {E}=29\,952$ for
$\mathcal {E}=29\,952$ for  $E=10^{-7}$. Convergence has been tested by gradually increasing the polynomial order for a fixed number of elements. The Coriolis term is treated explicitly by a third-order extrapolation scheme whereas the viscous terms are treated implicitly by a third-order backward differentiation scheme. Similarly to the ray tracing approach discussed previously, we focus on the particular case
$E=10^{-7}$. Convergence has been tested by gradually increasing the polynomial order for a fixed number of elements. The Coriolis term is treated explicitly by a third-order extrapolation scheme whereas the viscous terms are treated implicitly by a third-order backward differentiation scheme. Similarly to the ray tracing approach discussed previously, we focus on the particular case  $H=1$,
$H=1$,  $\alpha ={\rm \pi} /4$ and
$\alpha ={\rm \pi} /4$ and  $\omega =0.8$.
$\omega =0.8$.
Since we want to compare the axisymmetric conical geometry with its elliptic counterpart, care must be taken when choosing the forcing. In particular, latitudinal libration is not well suited since the forcing would be of viscous nature in the axisymmetric case (since the velocity at the boundaries would be purely tangential) while there would be a non-zero normal velocity and hence pressure coupling in the non-axisymmetric elliptic case. Another constraint comes from the corners, which will inevitably contribute to the viscous dynamics by emitting their own singular shear layers. Taking into account these considerations, we opted for a rotating vertical forcing at the bottom plane of the cone, sometimes called negative nutation (Sibgatullin et al. Reference Sibgatullin, Ermanyuk, Maas, Xu and Dauxois2017), defined by
 \begin{equation} u_z(z=1)=\begin{cases} \left(x\cos(\omega t)-y\sin(\omega t)\right)f(r), & \text{if }r<1,\\ 0, & \text{if }r>1, \end{cases} \end{equation}
\begin{equation} u_z(z=1)=\begin{cases} \left(x\cos(\omega t)-y\sin(\omega t)\right)f(r), & \text{if }r<1,\\ 0, & \text{if }r>1, \end{cases} \end{equation}
where  $f(r)=2r^3-3r^2+1$ is a smoothing function to ensure that the forcing vanishes close to the corners and
$f(r)=2r^3-3r^2+1$ is a smoothing function to ensure that the forcing vanishes close to the corners and  $r=\sqrt {x^2+y^2}$ is the cylindrical radius. The other two velocity components are zero and the other boundaries are all no slip. A similar forcing has already been used both experimentally (Pacary et al. Reference Pacary, Dauxois, Ermanyuk, Metz, Moulin and Joubaud2023) and numerically (Sibgatullin et al. Reference Sibgatullin, Xu, Tretyakov and Ermanyuk2019). Note that we obtained qualitatively similar results when considering an axisymmetric forcing similar to that used by Boury et al. (Reference Boury, Sibgatullin, Ermanyuk, Shmakova, Odier, Joubaud, Maas and Dauxois2021) for example.
$r=\sqrt {x^2+y^2}$ is the cylindrical radius. The other two velocity components are zero and the other boundaries are all no slip. A similar forcing has already been used both experimentally (Pacary et al. Reference Pacary, Dauxois, Ermanyuk, Metz, Moulin and Joubaud2023) and numerically (Sibgatullin et al. Reference Sibgatullin, Xu, Tretyakov and Ermanyuk2019). Note that we obtained qualitatively similar results when considering an axisymmetric forcing similar to that used by Boury et al. (Reference Boury, Sibgatullin, Ermanyuk, Shmakova, Odier, Joubaud, Maas and Dauxois2021) for example.
From a fluid at rest, we run the simulation until a periodic response is obtained. In order to quantify the inhomogeneities between different attractor planes, we first define the 2-D attractor path for each plane obtained from the intersection between a vertical plane containing the origin and the frustum. Each plane is parametrised with its azimuthal angle with respect to the  $x$ direction. The plane crossing the short elliptic axis thus corresponds to
$x$ direction. The plane crossing the short elliptic axis thus corresponds to  $\phi =0$ while the plane crossing the long elliptic axis corresponds to
$\phi =0$ while the plane crossing the long elliptic axis corresponds to  $\phi =\pm {\rm \pi}/2$. Note that the 2-D attractor path on each plane depends on the ellipticity
$\phi =\pm {\rm \pi}/2$. Note that the 2-D attractor path on each plane depends on the ellipticity  $b$. While the same attractor path is expected on each individual plane when
$b$. While the same attractor path is expected on each individual plane when  $b=1$, different attractors (but the same rectangular topology) are expected when
$b=1$, different attractors (but the same rectangular topology) are expected when  $b>1$. We then compute the averaged velocity amplitude along each path by averaging over time once the periodic response is obtained and along the attractor path. This averaged amplitude is a constant in the axisymmetric case
$b>1$. We then compute the averaged velocity amplitude along each path by averaging over time once the periodic response is obtained and along the attractor path. This averaged amplitude is a constant in the axisymmetric case  $b=1$ but depends on the orientation of the plane once
$b=1$ but depends on the orientation of the plane once  $b\neq 1$. As we vary the ellipticity of the domain, the amplitude of the response also varies. In order to focus on the azimuthal inhomogeneities induced by the wave attractor, we further normalise the amplitude by its average over all azimuthal angles
$b\neq 1$. As we vary the ellipticity of the domain, the amplitude of the response also varies. In order to focus on the azimuthal inhomogeneities induced by the wave attractor, we further normalise the amplitude by its average over all azimuthal angles  $\phi$.
$\phi$.
This ratio is plotted in figure 8(a) for a fixed  $E=10^{-7}$ and varying
$E=10^{-7}$ and varying  $b\geq 1$. As expected, it is unity for the axisymmetric case
$b\geq 1$. As expected, it is unity for the axisymmetric case  $b=1$. As
$b=1$. As  $b$ increases, a clear focusing of the energy along the short axis corresponding to
$b$ increases, a clear focusing of the energy along the short axis corresponding to  $\phi =0$ is observed. Note that a second local maximum is also observed along the long axis
$\phi =0$ is observed. Note that a second local maximum is also observed along the long axis  $\phi =\pm {\rm \pi}/2$. The same simulations are now run at a fixed
$\phi =\pm {\rm \pi}/2$. The same simulations are now run at a fixed  $b=1.2$ and varying Ekman number from
$b=1.2$ and varying Ekman number from  $E=10^{-4}$ down to
$E=10^{-4}$ down to  $E=10^{-7}$. Results are displayed in figure 8(b). While focusing is observed for all Ekman numbers, it is more and more pronounced as the Ekman number decreases. Note again that a residual localisation also persists around the long axis
$E=10^{-7}$. Results are displayed in figure 8(b). While focusing is observed for all Ekman numbers, it is more and more pronounced as the Ekman number decreases. Note again that a residual localisation also persists around the long axis  $\phi =\pm {\rm \pi}/2$. This secondary localisation of the energy is not expected from the ray tracing approach only since it corresponds to an unstable equilibrium as discussed previously in § 3.2.1. We have observed such residual localisation strongly depends on the particular choice of forcing and seems to be partially dependent on contributions from the bottom corner (see figure 9b), which goes well beyond our current understanding mostly based on local ray tracing.
$\phi =\pm {\rm \pi}/2$. This secondary localisation of the energy is not expected from the ray tracing approach only since it corresponds to an unstable equilibrium as discussed previously in § 3.2.1. We have observed such residual localisation strongly depends on the particular choice of forcing and seems to be partially dependent on contributions from the bottom corner (see figure 9b), which goes well beyond our current understanding mostly based on local ray tracing.

Figure 8. Azimuthal profile of the velocity amplitude averaged over time and over the 2-D attractor path on each meridional plane. (a) Variable long axis  $b$ at constant Ekman number
$b$ at constant Ekman number  $E=10^{-7}$. The amplitude is normalised by its azimuthal average. (b) Variable Ekman number at constant long axis
$E=10^{-7}$. The amplitude is normalised by its azimuthal average. (b) Variable Ekman number at constant long axis  $b=1.2$. The forcing frequency is
$b=1.2$. The forcing frequency is  $\omega =0.8$ and the forcing pattern is defined by (4.1) in all cases.
$\omega =0.8$ and the forcing pattern is defined by (4.1) in all cases.

Figure 9. Vertical velocity component in the planes (a)  $y=0$, (b)
$y=0$, (b)  $x=0$ and (c)
$x=0$ and (c)  $z=1.9$. The same colour scale is used for the three plots. Parameters are
$z=1.9$. The same colour scale is used for the three plots. Parameters are  $E=10^{-7}$,
$E=10^{-7}$,  $\omega =0.8$ and
$\omega =0.8$ and  $b=1.2$. The inclined line in (a) indicates the profile of the plane shown in figure 10. The dotted lines in (a,b) indicate the plane
$b=1.2$. The inclined line in (a) indicates the profile of the plane shown in figure 10. The dotted lines in (a,b) indicate the plane  $z=1.9$ shown in (c) while the dashed lines show the 2-D attractor path in each meridional plane.
$z=1.9$ shown in (c) while the dashed lines show the 2-D attractor path in each meridional plane.
A visual inspection of the wave field qualitatively confirms this conclusion. Figure 9 shows the vertical velocity component at a particular time once a periodic response has been obtained. One can see that the response along the attractor path is much stronger in the  $y=0$ plane (see figure 9a) than it is in the
$y=0$ plane (see figure 9a) than it is in the  $x=0$ plane (see figure 9b). Note of course that the 2-D attractor path (shown as dashed lines in figure 9a,b) is not the same in both planes since the domain is non-axisymmetric. This explains why we observe apparently curved wave beams. They correspond to the gradual modification of the attractor path as the geometry changes along the azimuthal direction due to the weak elliptic deformation. Similar structures were for example observed by Bühler & Muller (Reference Bühler and Muller2007). We also see in figure 9(b) that the attractor path in the unstable plane
$x=0$ plane (see figure 9b). Note of course that the 2-D attractor path (shown as dashed lines in figure 9a,b) is not the same in both planes since the domain is non-axisymmetric. This explains why we observe apparently curved wave beams. They correspond to the gradual modification of the attractor path as the geometry changes along the azimuthal direction due to the weak elliptic deformation. Similar structures were for example observed by Bühler & Muller (Reference Bühler and Muller2007). We also see in figure 9(b) that the attractor path in the unstable plane  $x=0$ is very close to the bottom corner, which perhaps explains why we have observed a secondary peak of energy in figure 8. The bottom corner forces a local shear layer which might overlap with the attractor beam in a non-trivial way. Nevertheless, figure 9(c) clearly shows that the amplitude of the stable attractor localised around the plane
$x=0$ is very close to the bottom corner, which perhaps explains why we have observed a secondary peak of energy in figure 8. The bottom corner forces a local shear layer which might overlap with the attractor beam in a non-trivial way. Nevertheless, figure 9(c) clearly shows that the amplitude of the stable attractor localised around the plane  $y=0$ is significantly larger than that of any other planes, including the unstable attractor localised in the
$y=0$ is significantly larger than that of any other planes, including the unstable attractor localised in the  $x=0$ plane.
$x=0$ plane.
In order to show the local structure of the super-attractor, we define a plane perpendicular to the attractor path along the short axis, as shown in figure 9(a). The velocity amplitude is averaged over time and normalised by its local maximum closest to the attractor path to obtain the maps displayed in figure 10. We compare the axisymmetric case  $b=0$ on the bottom row with the non-axisymmetric case
$b=0$ on the bottom row with the non-axisymmetric case  $b=1.2$ on the top row. For the axisymmetric case, one observes the gradual focusing of the axisymmetric wave beam around the attractor position as the Ekman number is decreased. The observed curvature is due to intersection between the flat plane and the curved axisymmetric wave beam. This axisymmetric pattern is clearly broken for
$b=1.2$ on the top row. For the axisymmetric case, one observes the gradual focusing of the axisymmetric wave beam around the attractor position as the Ekman number is decreased. The observed curvature is due to intersection between the flat plane and the curved axisymmetric wave beam. This axisymmetric pattern is clearly broken for  $b=1.2$. At
$b=1.2$. At  $E=10^{-5}$, while we observe a local maximum close to the theoretical position of the super-attractor (which corresponds to the origin with our choice of coordinates), no local beam is observed. At lower Ekman numbers, however, a localised beam is observed with a complex anisotropic structure. It is more elongated along the transverse direction
$E=10^{-5}$, while we observe a local maximum close to the theoretical position of the super-attractor (which corresponds to the origin with our choice of coordinates), no local beam is observed. At lower Ekman numbers, however, a localised beam is observed with a complex anisotropic structure. It is more elongated along the transverse direction  $y$ than along the in-plane coordinate
$y$ than along the in-plane coordinate  $s$. This confirms that the energy injected by the global large-scale forcing is eventually focused preferentially onto the super-attractor path localised around the
$s$. This confirms that the energy injected by the global large-scale forcing is eventually focused preferentially onto the super-attractor path localised around the  $y=0$ plane. While it is too early to convincingly discuss possible scalings with the Ekman number, we nevertheless report the amplitude scaling observed in our simulations in figure 11. We consider three different measures of amplitudes. The first is obtained by averaging over all 2-D attractor paths of each meridional section, which we refer to as global. The second corresponds to the average on the short axis attractor only while the last corresponds to the local amplitude maximum obtained from the maps displayed in figure 10. We observe that, for all three measures, the amplitude increases as the Ekman number decreases. The local measure might follow the scaling
$y=0$ plane. While it is too early to convincingly discuss possible scalings with the Ekman number, we nevertheless report the amplitude scaling observed in our simulations in figure 11. We consider three different measures of amplitudes. The first is obtained by averaging over all 2-D attractor paths of each meridional section, which we refer to as global. The second corresponds to the average on the short axis attractor only while the last corresponds to the local amplitude maximum obtained from the maps displayed in figure 10. We observe that, for all three measures, the amplitude increases as the Ekman number decreases. The local measure might follow the scaling  $E^{-1/6}$, which is expected from classical 2-D attractors (He et al. Reference He, Favier, Rieutord and Le Dizès2023) forced by inviscid forcing, although a much larger range of Ekman numbers should be explored to convincingly conclude on this matter. This is left for future works.
$E^{-1/6}$, which is expected from classical 2-D attractors (He et al. Reference He, Favier, Rieutord and Le Dizès2023) forced by inviscid forcing, although a much larger range of Ekman numbers should be explored to convincingly conclude on this matter. This is left for future works.

Figure 10. Maps of averaged velocity amplitude normalised by its maximum value on the local plane shown in figure 9(a). The Ekman number is decreasing from left to right. The top row (a–c) corresponds to the non-axisymmetric case  $b=1.2$ while the bottom row (d–f) corresponds to the axisymmetric case
$b=1.2$ while the bottom row (d–f) corresponds to the axisymmetric case  $b=1$. The line shows the iso-contour corresponding to 90 % of the local maximum value around the theoretical attractor location which is the origin of the local frame used here.
$b=1$. The line shows the iso-contour corresponding to 90 % of the local maximum value around the theoretical attractor location which is the origin of the local frame used here.

Figure 11. Amplitude scaling with Ekman for three different measures: the average is performed over all attractor paths irrespective of their azimuthal orientation (Global), only along the ray path corresponding to the short axis (Short axis) or focusing on the local maximum observed on the maps shown in figure 10 (Local). Note that the local value at  $E=10^{-4}$ is absent since we cannot unambiguously measure a local maximum in that case.
$E=10^{-4}$ is absent since we cannot unambiguously measure a local maximum in that case.
5. Discussion
We have shown how a 2-D attractor can be localised in three dimensions into a particular plane by breaking the axisymmetry of the fluid domain. All ray paths have been observed to converge to a particular 1-D curve contained within a specific plane. A local analysis has allowed us to confirm the exponential decay of the horizontal angle and has been successfully compared with ray tracing computations. While numerical simulations have shown a localisation of the energy onto the attracting plane, the harmonic response also contains contributions from the corners which might be at the origin of a secondary peak of energy along the long axis, which is unstable according to our ray tracing analysis. By construction of our particular geometry, the secondary unstable attractor is more and more affected by the corner contributions as  $b$ increases, which might explain why we observe a secondary energy increase there. However, the observed increase of kinetic energy along the stable super-attractor can only be explained by a secondary focusing since its topology within the particular plane
$b$ increases, which might explain why we observe a secondary energy increase there. However, the observed increase of kinetic energy along the stable super-attractor can only be explained by a secondary focusing since its topology within the particular plane  $y=0$ remains the same regardless of the elliptic deformation
$y=0$ remains the same regardless of the elliptic deformation  $b$.
$b$.
While our example has convincingly shown the existence of such super-attractors, generalising this result to other geometries would be valuable. We have focused on super-critical reflections only since  $\alpha >\theta$ in our case while it is known that the focusing properties of the 3-D reflection is non-trivially depending on the criticality of the slope (Pillet et al. Reference Pillet, Maas and Dauxois2019). We suspect that similar super-attractors exist in other conical geometries, including those involving sub-critical slopes, such as those used by Klein et al. (Reference Klein, Seelig, Kurgansky, Ghasemi, Borcia, Will, Schaller, Egbers and Harlander2014), Sibgatullin et al. (Reference Sibgatullin, Ermanyuk, Maas, Xu and Dauxois2017) and Boury et al. (Reference Boury, Sibgatullin, Ermanyuk, Shmakova, Odier, Joubaud, Maas and Dauxois2021), provided that the axisymmetry used up to now is broken. Other geometries known to support 2-D or axisymmetric attractors, such as the spherical shell or the paraboloidal/parabolic-shaped stadium, can probably generate super-attractors once elliptically deformed. In that respect, much remains to be done to bridge the gap between the local analysis close to the attracting plane and the global properties for which the whole geometry, and not just its asymptotic behaviour close to the attracting plane, matters.
$\alpha >\theta$ in our case while it is known that the focusing properties of the 3-D reflection is non-trivially depending on the criticality of the slope (Pillet et al. Reference Pillet, Maas and Dauxois2019). We suspect that similar super-attractors exist in other conical geometries, including those involving sub-critical slopes, such as those used by Klein et al. (Reference Klein, Seelig, Kurgansky, Ghasemi, Borcia, Will, Schaller, Egbers and Harlander2014), Sibgatullin et al. (Reference Sibgatullin, Ermanyuk, Maas, Xu and Dauxois2017) and Boury et al. (Reference Boury, Sibgatullin, Ermanyuk, Shmakova, Odier, Joubaud, Maas and Dauxois2021), provided that the axisymmetry used up to now is broken. Other geometries known to support 2-D or axisymmetric attractors, such as the spherical shell or the paraboloidal/parabolic-shaped stadium, can probably generate super-attractors once elliptically deformed. In that respect, much remains to be done to bridge the gap between the local analysis close to the attracting plane and the global properties for which the whole geometry, and not just its asymptotic behaviour close to the attracting plane, matters.
We have considered the particular case of an elliptic deformation in order to break the axisymmetry. While it has the advantage of being a well-defined perturbation of the axisymmetric reference case, it is certainly not the only way to proceed. It would be interesting to consider other types of non-axisymmetric geometries such as cuboids (Wu, Welfert & Lopez Reference Wu, Welfert and Lopez2023). Possible connections with quantum chaos in stadium billiards resulting in scarred patterns could also be explored (Kudrolli, Abraham & Gollub Reference Kudrolli, Abraham and Gollub2001). One could also further investigate the required geometrical properties of the fluid container necessary for the emergence of super-attractors. Finally, it is important to realise that, while the final super-attractor is indeed one-dimensional in the sense that all rays converge towards a 1-D parametric curve, this particular attractor is contained inside a plane since it corresponds to the localisation of the otherwise 2-D attractor. An interesting question would be to know whether general 1-D curves, not necessarily contained within the same plane, can be super-attractors and, if so, in which geometries. This is a tremendous geometrical problem and we hope this preliminary work will motivate future studies in that direction.
Supplementary movies
Supplementary movies are available at https://doi.org/10.1017/jfm.2024.5.
Acknowledgements
The authors would like to acknowledge L. Maas for fruitful discussions and relevant comments on an earlier version of the manuscript. Centre de Calcul Intensif d'Aix-Marseille is acknowledged for granting access to its high-performance computing resources.
Funding
This work was granted access to the HPC resources of IDRIS under the allocation 2023-A0140407543 made by GENCI.
Declaration of interests
The authors report no conflict of interest.
Appendix A. Three-dimensional reflection law
In this section, the 3-D reflection law is obtained. The relation between the incident and reflected angles  $\phi _i$ and
$\phi _i$ and  $\phi _r$ can be obtained by writing down the conditions on the velocity vectors
$\phi _r$ can be obtained by writing down the conditions on the velocity vectors  ${\boldsymbol V_i}$ and
${\boldsymbol V_i}$ and  ${\boldsymbol V_r}$ during the reflection process. We consider a plane surface inclined by an angle
${\boldsymbol V_r}$ during the reflection process. We consider a plane surface inclined by an angle  $\alpha$ (between 0 and
$\alpha$ (between 0 and  ${\rm \pi} /2$) with respect to the horizontal plane and defined it using its normal vector
${\rm \pi} /2$) with respect to the horizontal plane and defined it using its normal vector  ${\boldsymbol n}$ oriented towards the fluid. The first condition is the condition of non-penetrability, which reads
${\boldsymbol n}$ oriented towards the fluid. The first condition is the condition of non-penetrability, which reads
 \begin{equation} ({\boldsymbol V_r} + {\boldsymbol V_i})\boldsymbol{\cdot} {\boldsymbol n} =0 . \end{equation}
\begin{equation} ({\boldsymbol V_r} + {\boldsymbol V_i})\boldsymbol{\cdot} {\boldsymbol n} =0 . \end{equation}The second condition is the conservation of the horizontal velocity perpendicular to the normal, which can be written as
 \begin{equation} ({\boldsymbol V_r}\times {\boldsymbol e_z})\boldsymbol{\cdot} {\boldsymbol n} = ({\boldsymbol V_i}\times {\boldsymbol e_z})\boldsymbol{\cdot} {\boldsymbol n} . \end{equation}
\begin{equation} ({\boldsymbol V_r}\times {\boldsymbol e_z})\boldsymbol{\cdot} {\boldsymbol n} = ({\boldsymbol V_i}\times {\boldsymbol e_z})\boldsymbol{\cdot} {\boldsymbol n} . \end{equation}
They are two other conditions that prescribe the direction of propagation of the incident and reflected beams which should be on the axial cone of angle  $\theta$:
$\theta$:
 \begin{gather} \tan^2\theta \|{\boldsymbol V_r}\times{\boldsymbol e_z} \|^2 = |{\boldsymbol V_r}\boldsymbol{\cdot} {\boldsymbol e_z}|^2 , \end{gather}
\begin{gather} \tan^2\theta \|{\boldsymbol V_r}\times{\boldsymbol e_z} \|^2 = |{\boldsymbol V_r}\boldsymbol{\cdot} {\boldsymbol e_z}|^2 , \end{gather} \begin{gather} \tan^2\theta \|{\boldsymbol V_i}\times{\boldsymbol e_z} \|^2 = |{\boldsymbol V_i}\boldsymbol{\cdot} {\boldsymbol e_z}|^2 . \end{gather}
\begin{gather} \tan^2\theta \|{\boldsymbol V_i}\times{\boldsymbol e_z} \|^2 = |{\boldsymbol V_i}\boldsymbol{\cdot} {\boldsymbol e_z}|^2 . \end{gather}To obtain a general formula, the idea is to express the vectors  ${\boldsymbol n}$,
${\boldsymbol n}$,  $\boldsymbol V_r$ and
$\boldsymbol V_r$ and  $\boldsymbol V_i$ in the frame
$\boldsymbol V_i$ in the frame  $(x',y',z)$ oriented along the steepest descent direction (see figure 1).
$(x',y',z)$ oriented along the steepest descent direction (see figure 1).
The above equations can then be written as
 $$\begin{gather} (V_{rx'} + V_{ix'}) \tan \varphi_{\boldsymbol n} + (V_{rz} + V_{iz}) = 0 , \end{gather}$$
$$\begin{gather} (V_{rx'} + V_{ix'}) \tan \varphi_{\boldsymbol n} + (V_{rz} + V_{iz}) = 0 , \end{gather}$$ $$\begin{gather}V_{ry'} = V_{iy'} , \end{gather}$$
$$\begin{gather}V_{ry'} = V_{iy'} , \end{gather}$$ $$\begin{gather}\tan^2\theta (V_{rx'}^2 + V_{ry'}^2) = V_{rz}^2 , \end{gather}$$
$$\begin{gather}\tan^2\theta (V_{rx'}^2 + V_{ry'}^2) = V_{rz}^2 , \end{gather}$$ $$\begin{gather}\tan^2\theta (V_{ix'}^2 + V_{iy'}^2) = V_{iz}^2 , \end{gather}$$
$$\begin{gather}\tan^2\theta (V_{ix'}^2 + V_{iy'}^2) = V_{iz}^2 , \end{gather}$$
where  $\varphi _{\boldsymbol n}$ is the angle (between 0 and
$\varphi _{\boldsymbol n}$ is the angle (between 0 and  ${\rm \pi}$) of the vector
${\rm \pi}$) of the vector  ${\boldsymbol n}$ with respect to the vertical axis. Using (A5b) to eliminate
${\boldsymbol n}$ with respect to the vertical axis. Using (A5b) to eliminate  $V_{ry'}$ and
$V_{ry'}$ and  $V_{iy'}$ in the equation obtained by subtracting (A5d)–(A5c) gives
$V_{iy'}$ in the equation obtained by subtracting (A5d)–(A5c) gives
 \begin{equation} \tan^2\theta(V_{rx'}^2 - V_{ix'}^2) = V_{rz}^2 - V_{iz}^2 , \end{equation}
\begin{equation} \tan^2\theta(V_{rx'}^2 - V_{ix'}^2) = V_{rz}^2 - V_{iz}^2 , \end{equation}
which, after eliminating  $v_{ix'}$ using (A5a), reduces to
$v_{ix'}$ using (A5a), reduces to
 \begin{equation} (\tan ^2\theta - \tan^2 \varphi_{\boldsymbol n}) V_{rx'} = 2 \tan \varphi_{\boldsymbol n} V_{iz} + (\tan ^2\theta + \tan^2 \varphi_{\boldsymbol n}) V_{ix'} . \end{equation}
\begin{equation} (\tan ^2\theta - \tan^2 \varphi_{\boldsymbol n}) V_{rx'} = 2 \tan \varphi_{\boldsymbol n} V_{iz} + (\tan ^2\theta + \tan^2 \varphi_{\boldsymbol n}) V_{ix'} . \end{equation}Using
 \begin{equation} \frac{V_{iz}}{V_{iy'}} = \frac{{\rm cotan} \varphi_i}{ \sin (\phi_i - \phi_{\boldsymbol n})} ,\quad \frac{V_{ix'}}{V_{iy'}}= {\rm cotan}(\phi_i -\phi_{\boldsymbol n}) ,\quad \frac{V_{rx'}}{V_{ry'}} ={\rm cotan}(\phi_r-\phi_{\boldsymbol n}), \end{equation}
\begin{equation} \frac{V_{iz}}{V_{iy'}} = \frac{{\rm cotan} \varphi_i}{ \sin (\phi_i - \phi_{\boldsymbol n})} ,\quad \frac{V_{ix'}}{V_{iy'}}= {\rm cotan}(\phi_i -\phi_{\boldsymbol n}) ,\quad \frac{V_{rx'}}{V_{ry'}} ={\rm cotan}(\phi_r-\phi_{\boldsymbol n}), \end{equation}
we get an expression that gives the angle  $\phi _r -\phi _{\boldsymbol n}$ ,
$\phi _r -\phi _{\boldsymbol n}$ ,
 \begin{equation} \tan (\phi_r -\phi_{\boldsymbol n}) = \frac{(\tan^2\theta - \tan^2\varphi_{\boldsymbol n}) \sin(\phi_i -\phi_{\boldsymbol n})}{ (\tan ^2\theta + \tan^2 \varphi_{\boldsymbol n} ) \cos(\phi_i -\phi_{\boldsymbol n}) + 2 \tan \varphi_{\boldsymbol n} {\rm cotan}\varphi_i }. \end{equation}
\begin{equation} \tan (\phi_r -\phi_{\boldsymbol n}) = \frac{(\tan^2\theta - \tan^2\varphi_{\boldsymbol n}) \sin(\phi_i -\phi_{\boldsymbol n})}{ (\tan ^2\theta + \tan^2 \varphi_{\boldsymbol n} ) \cos(\phi_i -\phi_{\boldsymbol n}) + 2 \tan \varphi_{\boldsymbol n} {\rm cotan}\varphi_i }. \end{equation} This formula applies to all configurations. Only the term  $\tan \varphi _n {\rm cotan}\varphi _i$ depends on the orientation of the normal
$\tan \varphi _n {\rm cotan}\varphi _i$ depends on the orientation of the normal  ${\boldsymbol n}$ and of the incident beam
${\boldsymbol n}$ and of the incident beam  ${\boldsymbol V_i}$ with respect to the vertical. As
${\boldsymbol V_i}$ with respect to the vertical. As  $\varphi _i = {\rm \pi}/2 - \theta$ and
$\varphi _i = {\rm \pi}/2 - \theta$ and  $\varphi _{\boldsymbol n} = \alpha$ (respectively
$\varphi _{\boldsymbol n} = \alpha$ (respectively  $\varphi _i = {\rm \pi}/2 + \theta$ and
$\varphi _i = {\rm \pi}/2 + \theta$ and  $\varphi _{\boldsymbol n} = {\rm \pi}-\alpha$) when these vectors are oriented upwards (respectively downwards), we get
$\varphi _{\boldsymbol n} = {\rm \pi}-\alpha$) when these vectors are oriented upwards (respectively downwards), we get
 \begin{equation} \tan (\phi_r -\phi_{\boldsymbol n}) = \frac{(\tan^2\theta - \tan^2\alpha) \sin(\phi_i -\phi_{\boldsymbol n})}{ (\tan ^2\theta + \tan^2 \alpha ) \cos(\phi_i -\phi_{\boldsymbol n}) \pm 2 \tan \alpha \tan \theta }, \end{equation}
\begin{equation} \tan (\phi_r -\phi_{\boldsymbol n}) = \frac{(\tan^2\theta - \tan^2\alpha) \sin(\phi_i -\phi_{\boldsymbol n})}{ (\tan ^2\theta + \tan^2 \alpha ) \cos(\phi_i -\phi_{\boldsymbol n}) \pm 2 \tan \alpha \tan \theta }, \end{equation}
where the sign  $-$ is taken when the two vectors
$-$ is taken when the two vectors  ${\boldsymbol n}$ and
${\boldsymbol n}$ and  ${\boldsymbol {V_i}}$ are oriented oppositely with respect to the vertical (one of the two vectors is oriented upward and the other downward). This formula works for all types of reflections (subcritical or supercritical), and for horizontal and vertical surfaces as well. For this reason, we think that it is more convenient than the formulas that have been used in Rabitti & Maas (Reference Rabitti and Maas2014) and Pillet et al. (Reference Pillet, Ermanyuk, Maas, Sibgatullin and Dauxois2018).
${\boldsymbol {V_i}}$ are oriented oppositely with respect to the vertical (one of the two vectors is oriented upward and the other downward). This formula works for all types of reflections (subcritical or supercritical), and for horizontal and vertical surfaces as well. For this reason, we think that it is more convenient than the formulas that have been used in Rabitti & Maas (Reference Rabitti and Maas2014) and Pillet et al. (Reference Pillet, Ermanyuk, Maas, Sibgatullin and Dauxois2018).
Appendix B. Local behaviour for  $b=b_{c\pm }$
$b=b_{c\pm }$

For the values  $b= b_{c\pm }$, the two eigenvalues are equal (to
$b= b_{c\pm }$, the two eigenvalues are equal (to  $\lambda _{c\pm } = \pm \sqrt {K}$) and (3.21a,b) giving
$\lambda _{c\pm } = \pm \sqrt {K}$) and (3.21a,b) giving  $C_0$ and
$C_0$ and  $D_0$ break down. In that case, the two eigenvectors given by (3.19b) are also equal (to
$D_0$ break down. In that case, the two eigenvectors given by (3.19b) are also equal (to  $\boldsymbol {\varPsi }_{\!c\pm }$). One should introduce another vector, say
$\boldsymbol {\varPsi }_{\!c\pm }$). One should introduce another vector, say  $\boldsymbol {E}_1=(1,0)^\top$ to decompose the vector
$\boldsymbol {E}_1=(1,0)^\top$ to decompose the vector  $\boldsymbol {\varPsi }_{\!2p}$. Using the fact that when
$\boldsymbol {\varPsi }_{\!2p}$. Using the fact that when  $b=b_{c\pm }$,
$b=b_{c\pm }$,
 \begin{equation} \boldsymbol{\mathcal{M}}^{2p} \boldsymbol{E}_1 =K^{p} \boldsymbol{E}_1 \mp p K^{p-1/2} \sqrt{2(1+K)} \boldsymbol{\varPsi}_{\!c\pm}, \end{equation}
\begin{equation} \boldsymbol{\mathcal{M}}^{2p} \boldsymbol{E}_1 =K^{p} \boldsymbol{E}_1 \mp p K^{p-1/2} \sqrt{2(1+K)} \boldsymbol{\varPsi}_{\!c\pm}, \end{equation}one can easily show that
 \begin{equation}
\boldsymbol{\varPsi}_{\!2p} = \big(C_{c\pm} K^{p} \mp
D_{c} \,p K^{p-1/2}
\sqrt{2(1+K)}\big)\boldsymbol{\varPsi}_{\!c\pm} + D_{c}
K^{p} \boldsymbol{E}_1,
\end{equation}
\begin{equation}
\boldsymbol{\varPsi}_{\!2p} = \big(C_{c\pm} K^{p} \mp
D_{c} \,p K^{p-1/2}
\sqrt{2(1+K)}\big)\boldsymbol{\varPsi}_{\!c\pm} + D_{c}
K^{p} \boldsymbol{E}_1,
\end{equation}where
 \begin{equation} C_{c\pm} = \frac{\phi_0 -{\rm \pi}}{1\pm \sqrt{K}},\quad D_{c} = \psi_0 - \sqrt{\frac{2}{1+K}} (\phi_0 -{\rm \pi}) . \end{equation}
\begin{equation} C_{c\pm} = \frac{\phi_0 -{\rm \pi}}{1\pm \sqrt{K}},\quad D_{c} = \psi_0 - \sqrt{\frac{2}{1+K}} (\phi_0 -{\rm \pi}) . \end{equation}

































































