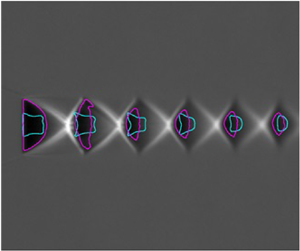
This study identifies two previously unrecognised screech modes in non-axisymmetric jets. Spectral proper orthogonal decomposition (SPOD) of ultra-high-speed schlieren images reveals a bi-axial flapping mode in a rectangular jet and a quasi-helical mode in an elliptical jet. To educe the complex three-dimensional structure of these new modes, SPOD is performed on datasets from different viewing perspectives, produced by rotating the nozzle with respect to the schlieren path to an azimuthal angle  $\theta$. The bi-axial flapping mode is strongly antisymmetric from any perspective. However, the SPOD eigenvalue at the screech frequency (
$\theta$. The bi-axial flapping mode is strongly antisymmetric from any perspective. However, the SPOD eigenvalue at the screech frequency ( $\lambda _s$) varies with
$\lambda _s$) varies with  $\theta$ and the axial distance of the SPOD domain from the nozzle lip. This mode most closely resembles a flapping mode in the minor-axis plane close to the nozzle lip and a wagging mode in the major-axis plane further downstream. This transition from flapping to wagging at the same frequency correlates with the axis switching defined by the shock-cell structure in the mean flow. The quasi-helical mode in the elliptical jet is characterised by an antisymmetric structure present in the SPOD spatial modes whose eigenvalue
$\theta$ and the axial distance of the SPOD domain from the nozzle lip. This mode most closely resembles a flapping mode in the minor-axis plane close to the nozzle lip and a wagging mode in the major-axis plane further downstream. This transition from flapping to wagging at the same frequency correlates with the axis switching defined by the shock-cell structure in the mean flow. The quasi-helical mode in the elliptical jet is characterised by an antisymmetric structure present in the SPOD spatial modes whose eigenvalue  $\lambda _s$ is insensitive to both
$\lambda _s$ is insensitive to both  $\theta$ and the axial domain. These findings indicate that the spatial evolution of the mean flow in non-axisymmetric jets may allow them to support a range of additional screech modes that differ significantly from those supported by the original three-dimensional shape of the jet.
$\theta$ and the axial domain. These findings indicate that the spatial evolution of the mean flow in non-axisymmetric jets may allow them to support a range of additional screech modes that differ significantly from those supported by the original three-dimensional shape of the jet.
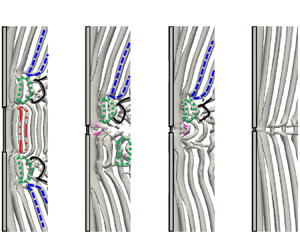
The three-dimensional flow field past an I-shaped dual-step cylinder has been obtained by numerical integration of the Navier–Stokes equations at Reynolds number ( $Re_D$) 150. The I-shaped cylinder consisted of two large-diameter (D) cylinders with a small-diameter (d) cylinder in between. With a view to exploring the vortex dynamics and structural loads, simulations were performed for eight different lengths
$Re_D$) 150. The I-shaped cylinder consisted of two large-diameter (D) cylinders with a small-diameter (d) cylinder in between. With a view to exploring the vortex dynamics and structural loads, simulations were performed for eight different lengths  $l$ of the small cylinder, varied from
$l$ of the small cylinder, varied from  $l/D=10$ to 0.2 for a fixed diameter ratio
$l/D=10$ to 0.2 for a fixed diameter ratio  $D/d=2$. When the length of the small cylinder is sufficiently large, the wake behind the I-shaped cylinder is similar to the wake behind the single-step cylinder (Tian et al., J. Fluid Mech., vol. 891, 2020, A24). As the small cylinder length decreases, the enhanced interactions between the two steps make the present wake deviate from the wake of the single-step cylinder, leading to four different wake modes distinguished by different combinations of vortex cells. The physical formation mechanisms were analysed in terms of the vortex dynamics. Besides the wake flow, the streamwise vortices around the I-shaped step cylinder were also investigated. A pair of edge vortices and a junction vortex were identified for
$D/d=2$. When the length of the small cylinder is sufficiently large, the wake behind the I-shaped cylinder is similar to the wake behind the single-step cylinder (Tian et al., J. Fluid Mech., vol. 891, 2020, A24). As the small cylinder length decreases, the enhanced interactions between the two steps make the present wake deviate from the wake of the single-step cylinder, leading to four different wake modes distinguished by different combinations of vortex cells. The physical formation mechanisms were analysed in terms of the vortex dynamics. Besides the wake flow, the streamwise vortices around the I-shaped step cylinder were also investigated. A pair of edge vortices and a junction vortex were identified for  $l/D \geq ~1$. When the gap between the two steps becomes too small,
$l/D \geq ~1$. When the gap between the two steps becomes too small,  $l/D \leq ~0.2$, the junction vortex disappears, and only a pair of edge vortices exists. Varying the distance between the two steps strongly affects the structural loads (drag and lift) along the I-shaped cylinder. The dependence of the loads on
$l/D \leq ~0.2$, the junction vortex disappears, and only a pair of edge vortices exists. Varying the distance between the two steps strongly affects the structural loads (drag and lift) along the I-shaped cylinder. The dependence of the loads on  $l/D$ was readily explained by the different wake modes.
$l/D$ was readily explained by the different wake modes.
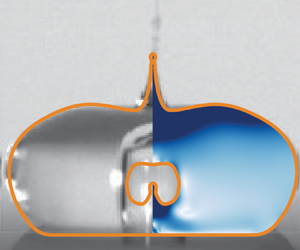
A liquid drop impacting a rigid substrate undergoes deformation and spreading due to normal reaction forces, which are counteracted by surface tension. On a non-wetting substrate, the drop subsequently retracts and takes off. Our recent work (Zhang et al., Phys. Rev. Lett., vol. 129, 2022, 104501) revealed two peaks in the temporal evolution of the normal force  $F(t)$ – one at impact and another at jump-off. The second peak coincides with a Worthington jet formation, which vanishes at high viscosities due to increased viscous dissipation affecting flow focusing. In this article, using experiments, direct numerical simulations and scaling arguments, we characterize both the peak amplitude
$F(t)$ – one at impact and another at jump-off. The second peak coincides with a Worthington jet formation, which vanishes at high viscosities due to increased viscous dissipation affecting flow focusing. In this article, using experiments, direct numerical simulations and scaling arguments, we characterize both the peak amplitude  $F_1$ at impact and the one at takeoff (
$F_1$ at impact and the one at takeoff ( $F_2$) and elucidate their dependency on the control parameters: the Weber number
$F_2$) and elucidate their dependency on the control parameters: the Weber number  $We$ (dimensionless impact kinetic energy) and the Ohnesorge number
$We$ (dimensionless impact kinetic energy) and the Ohnesorge number  $Oh$ (dimensionless viscosity). The first peak amplitude
$Oh$ (dimensionless viscosity). The first peak amplitude  $F_1$ and the time
$F_1$ and the time  $t_1$ to reach it depend on inertial time scales for low viscosity liquids, remaining nearly constant for viscosities up to 100 times that of water. For high viscosity liquids, we balance the rate of change in kinetic energy with viscous dissipation to obtain new scaling laws:
$t_1$ to reach it depend on inertial time scales for low viscosity liquids, remaining nearly constant for viscosities up to 100 times that of water. For high viscosity liquids, we balance the rate of change in kinetic energy with viscous dissipation to obtain new scaling laws:  $F_1/F_\rho \sim \sqrt {Oh}$ and
$F_1/F_\rho \sim \sqrt {Oh}$ and  $t_1/\tau _\rho \sim 1/\sqrt {Oh}$, where
$t_1/\tau _\rho \sim 1/\sqrt {Oh}$, where  $F_\rho$ and
$F_\rho$ and  $\tau _\rho$ are the inertial force and time scales, respectively, which are consistent with our data. The time
$\tau _\rho$ are the inertial force and time scales, respectively, which are consistent with our data. The time  $t_2$ at which the amplitude
$t_2$ at which the amplitude  $F_2$ appears is set by the inertiocapillary time scale
$F_2$ appears is set by the inertiocapillary time scale  $\tau _\gamma$, independent of both the viscosity and the impact velocity of the drop. However, these properties dictate the magnitude of this amplitude.
$\tau _\gamma$, independent of both the viscosity and the impact velocity of the drop. However, these properties dictate the magnitude of this amplitude.