



1. Introduction
Based upon rheological descriptions of granular behaviour (Silbert et al. Reference Silbert, Ertaz, Grest, Halsey, Levine and Plimpton2001; da Cruz et al. Reference da Cruz, Emam, Prochnow, Roux and Chevoir2005; Jop, Forterre & Pouliquen Reference Jop, Forterre and Pouliquen2006), continuum models have in recent decades been applied successfully to a variety of granular surface flows. These include flows over rigid boundaries (Edwards et al. Reference Edwards, Russell, Johnson and Gray2019; Lin & Yang Reference Lin and Yang2020) and flows over erodible layers. The latter include steady channel flows (Jop, Forterre & Pouliquen Reference Jop, Forterre and Pouliquen2005; Liu & Henann Reference Liu and Henann2017; Berzi, Jenkins & Richard Reference Berzi, Jenkins and Richard2020), transient channel flows (Jop, Forterre & Pouliquen Reference Jop, Forterre and Pouliquen2007; Capart, Hung & Stark Reference Capart, Hung and Stark2015; Parez, Aharonov & Toussaint Reference Parez, Aharonov and Toussaint2016; Larcher, Prati & Fraccarollo Reference Larcher, Prati and Fraccarollo2018; Capart Reference Capart2023) and steady, continuous avalanching in rotating drums and draining silos (Hung, Stark & Capart Reference Hung, Stark and Capart2016; Hung, Aussillous & Capart Reference Hung, Aussillous and Capart2018; Hung et al. Reference Hung, Chen, Wang and Hill2023). Important flows over erodible beds that have so far resisted this approach, however, are the discrete avalanches produced in very slowly rotated drums (Evesque Reference Evesque1991; Courrech du Pont et al. Reference Courrech du Pont, Fischer, Gondret, Perrin and Rabaud2005; Liu, Zhou & Specht Reference Liu, Zhou and Specht2010; Balmforth & McElwaine Reference Balmforth and McElwaine2018), in gradually tilted sand boxes (Jaeger, Liu & Nagel Reference Jaeger, Liu and Nagel1989; Evesque et al. Reference Evesque, Fargeix, Habib, Luong and Porion1993; Aguirre et al. Reference Aguirre, Nerone, Calvo, Ippolito and Bideau2000) or down continuously supplied sand piles (Lemieux & Durian Reference Lemieux and Durian2000; Altshuler et al. Reference Altshuler, Toussaint, Martínez, Sotolongo-Costa, Schmittbuhl and Maløy2008; Arran & Vriend Reference Arran and Vriend2018; Alonso-Llanes et al. Reference Alonso-Llanes, Martínez, Batista-Leyva, Toussaint and Altshuler2022). In such configurations, granular slopes can remain at rest in a metastable state, then suddenly relax to milder inclinations by way of short-lived surface avalanches. In slowly driven experiments that used ionic concentration to turn interparticle friction on and off, Perrin et al. (Reference Perrin, Clavaud, Wyart, Metzger and Forterre2019) found that sawtooth-shaped hysteretic avalanches occurred for frictional particles, but that hysteresis completely disappeared for frictionless particles.
In rotating drums, the regime in which discrete avalanches occur is known as the slumping regime, as opposed to the rolling and cascading regimes for which grains flow continuously and steadily along the surface. As illustrated by figure 1(a), a characteristic of the slumping regime is that the granular free surface remains nearly straight as it evolves over time. For the rolling regime, the surface is also nearly straight, but maintains a steady inclination, whereas for the cascading regime the steady free surface becomes curved (Rajchenbach Reference Rajchenbach1990; Hung et al. Reference Hung, Stark and Capart2016; Li & Andrade Reference Li and Andrade2020). In the slumping regime, observed at very slow rotation rates, avalanches occur episodically, alternating with periods of pure rigid body rotation. As illustrated by figure 1(b), during these periods the surface inclination gradually steepens, before the next avalanche occurs. During each avalanche, grains typically accelerate from rest, then decelerate back to arrest within a short time. Granular motion is often limited to a surface layer, but the thickness of this layer can grow and decay over time as the avalanche entrains and detrains grains at the base. The basal boundary is therefore a moving non-material interface (Jop et al. Reference Jop, Forterre and Pouliquen2007; Lusso et al. Reference Lusso, Bouchut, Ern and Mangeney2021; Capart Reference Capart2023). As for other geomorphic flows (Hungr Reference Hungr1995), bulking and debulking may significantly affect the flow dynamics, and in particular control the peak flow rate. Unlike most geomorphic flows, however, water is not needed. Instead, the flowing layer and static deposit are composed of the same material: dry grains.

Figure 1. Discrete avalanches in a slowly rotated drum: (a) definition sketch with key parameters and variables; (b) typical surface inclination history, featuring a series of sudden slope relaxation events lasting from failure at time  $t_f$ to arrest at time
$t_f$ to arrest at time  $t_a$.
$t_a$.
In nature, episodic avalanches of dry grains can be observed down screes or debris slopes (Church, Stock & Ryder Reference Church, Stock and Ryder1979; Dai et al. Reference Dai, Wu, Zhong, Shi, Qin, Yang and Yang2022), or down the lee faces of eolian dunes (Allen Reference Allen1970; Sherman et al. Reference Sherman, Zhang, Pelletier, Ellis, Farrell and Li2022). Related phenomena, also involving the failure of metastable slopes, include landslides and snow avalanches. The study of rotating drum avalanches can thus help clarify generic features of granular flows that are of much broader interest (Evesque Reference Evesque1991; Linz, Hager & Hänggi Reference Linz, Hager and Hänggi1999; Perrin et al. Reference Perrin, Clavaud, Wyart, Metzger and Forterre2019). In particular, episodic avalanches of dry grains represent possibly the simplest case in which a small perturbation, slow steepening or gradual weakening can produce a disproportionate slope response. The prediction of the resulting amplitude, peak flow rate and eventual arrest inclination is therefore a problem of practical as well as fundamental interest.
To simulate the dynamics of discrete avalanches, a number of phenomenological models have been proposed and applied to rotating drum flows (Bouchaud et al. Reference Bouchaud, Cates, Ravi Prakash and Edwards1994; Linz et al. Reference Linz, Hager and Hänggi1999; Fischer et al. Reference Fischer, Gondret, Perrin and Rabaud2008; Fischer, Gondret & Rabaud Reference Fischer, Gondret and Rabaud2009; Marteau & Andrade Reference Marteau and Andrade2018). Typically, these models formulate an ordinary differential equation for the time-evolving surface inclination  $\theta (t)$ (see figure 1a,b), with terms designed to replicate experimentally observed behaviours. Although such models provide valuable insights, they do not deduce the flow dynamics from generally applicable, explicit assumptions about local granular behaviour. Continuum models, on the other hand, have been successful at describing avalanching flows released from rest by suddenly lifting a lid (Jop et al. Reference Jop, Forterre and Pouliquen2007; Larcher et al. Reference Larcher, Prati and Fraccarollo2018) or tilting a channel (Capart et al. Reference Capart, Hung and Stark2015). These include models resolved over the vertical (Jop et al. Reference Jop, Forterre and Pouliquen2007; Sarno et al. Reference Sarno, Wang, Tai, Papa, Villani and Oberlack2022), or integrated over depth (Capart et al. Reference Capart, Hung and Stark2015). So far, however, no continuum model has been able to evolve the inclination and velocity profile of self-triggered avalanches like those observed in slowly rotating drums.
$\theta (t)$ (see figure 1a,b), with terms designed to replicate experimentally observed behaviours. Although such models provide valuable insights, they do not deduce the flow dynamics from generally applicable, explicit assumptions about local granular behaviour. Continuum models, on the other hand, have been successful at describing avalanching flows released from rest by suddenly lifting a lid (Jop et al. Reference Jop, Forterre and Pouliquen2007; Larcher et al. Reference Larcher, Prati and Fraccarollo2018) or tilting a channel (Capart et al. Reference Capart, Hung and Stark2015). These include models resolved over the vertical (Jop et al. Reference Jop, Forterre and Pouliquen2007; Sarno et al. Reference Sarno, Wang, Tai, Papa, Villani and Oberlack2022), or integrated over depth (Capart et al. Reference Capart, Hung and Stark2015). So far, however, no continuum model has been able to evolve the inclination and velocity profile of self-triggered avalanches like those observed in slowly rotating drums.
In the present work, we propose such a deductive model, based on two essential components. The first is a local flow rheology, provided by the linearized  $\mu (I)$ model relating the stress ratio
$\mu (I)$ model relating the stress ratio  $\mu$ to the inertia number
$\mu$ to the inertia number  $I$ (da Cruz et al. Reference da Cruz, Emam, Prochnow, Roux and Chevoir2005; Jop et al. Reference Jop, Forterre and Pouliquen2006). The second is a new set of basal boundary conditions, proposed recently for granular flows over brittle erodible beds (Capart Reference Capart2023). These assert that, for entrainment to occur, the basal shear stress must overcome the erosion resistance of the jammed deposit, while for detrainment to take place the basal shear rate must vanish. Bypass takes place when neither entrainment or detrainment can occur. The adopted rheology, although simple, is supported by experiments (Jop et al. Reference Jop, Forterre and Pouliquen2005; Tapia, Pouliquen & Guazzelli Reference Tapia, Pouliquen and Guazzelli2019) and discrete particle simulations (da Cruz et al. Reference da Cruz, Emam, Prochnow, Roux and Chevoir2005; Azéma & Radjaï Reference Azéma and Radjaï2014). The basal boundary conditions, by contrast, have so far been confronted only with experiments involving starting and stopping flows, down slopes of constant inclination (Capart et al. Reference Capart, Hung and Stark2015; Larcher et al. Reference Larcher, Prati and Fraccarollo2018). Their application to episodic avalanches, down slopes of evolving inclination, thus constitutes a challenging new test.
$I$ (da Cruz et al. Reference da Cruz, Emam, Prochnow, Roux and Chevoir2005; Jop et al. Reference Jop, Forterre and Pouliquen2006). The second is a new set of basal boundary conditions, proposed recently for granular flows over brittle erodible beds (Capart Reference Capart2023). These assert that, for entrainment to occur, the basal shear stress must overcome the erosion resistance of the jammed deposit, while for detrainment to take place the basal shear rate must vanish. Bypass takes place when neither entrainment or detrainment can occur. The adopted rheology, although simple, is supported by experiments (Jop et al. Reference Jop, Forterre and Pouliquen2005; Tapia, Pouliquen & Guazzelli Reference Tapia, Pouliquen and Guazzelli2019) and discrete particle simulations (da Cruz et al. Reference da Cruz, Emam, Prochnow, Roux and Chevoir2005; Azéma & Radjaï Reference Azéma and Radjaï2014). The basal boundary conditions, by contrast, have so far been confronted only with experiments involving starting and stopping flows, down slopes of constant inclination (Capart et al. Reference Capart, Hung and Stark2015; Larcher et al. Reference Larcher, Prati and Fraccarollo2018). Their application to episodic avalanches, down slopes of evolving inclination, thus constitutes a challenging new test.
The paper is structured as follows. In § 2, model assumptions and equations are presented, simplified and cast in dimensionless form. In § 3, analytical techniques are used to derive solutions for three successive stages of avalanche evolution, characterized respectively by entrainment, bypass and detrainment. In § 4, the behaviour of the solutions is described, as a function of the dimensionless number that measures the brittleness of the slope. In § 5, comparisons are made with experiments and discrete element simulations. Section 6, finally, is devoted to conclusions and avenues for future work.
2. Model formulation
2.1. Model equations and assumptions
As illustrated by figure 1(a), we consider dry granular avalanches down erodible slopes of surface inclination  $\theta$ close to the critical angle
$\theta$ close to the critical angle  $\theta _c$, and choose axes
$\theta _c$, and choose axes  $(x,z)$ tilted at this angle. We denote by
$(x,z)$ tilted at this angle. We denote by  ${\tilde {z}}(x,t)$ and
${\tilde {z}}(x,t)$ and  ${\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{z}}(x,t)$ the upper and lower boundaries of the flow layer, with
${\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{z}}(x,t)$ the upper and lower boundaries of the flow layer, with  $h(x,t) = {\tilde {z}} - {\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {z}}$ the corresponding thickness. Local governing equations are then applied to domain
$h(x,t) = {\tilde {z}} - {\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {z}}$ the corresponding thickness. Local governing equations are then applied to domain  ${\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {z}} < z < {\tilde {z}}$, subject to the following assumptions. In a drum of width
${\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {z}} < z < {\tilde {z}}$, subject to the following assumptions. In a drum of width  $W$, we consider solid grains of diameter
$W$, we consider solid grains of diameter  $D$ and density
$D$ and density  $\rho _S$, and assume dense granular flows for which the solid fraction
$\rho _S$, and assume dense granular flows for which the solid fraction  $c_S$ and bulk density
$c_S$ and bulk density  $\rho = c_S \rho _S$ are approximately constant, as supported by experimental observations (MiDi Reference Midi2004). Although the transition from static to flowing typically involves some degree of dilatancy, the resulting changes in volume fraction are assumed small enough to be negligible. Mass conservation therefore reduces to the continuity equation
$\rho = c_S \rho _S$ are approximately constant, as supported by experimental observations (MiDi Reference Midi2004). Although the transition from static to flowing typically involves some degree of dilatancy, the resulting changes in volume fraction are assumed small enough to be negligible. Mass conservation therefore reduces to the continuity equation
 \begin{equation} \frac{\partial u}{\partial x} + \frac{\partial w}{\partial z} = 0, \end{equation}
\begin{equation} \frac{\partial u}{\partial x} + \frac{\partial w}{\partial z} = 0, \end{equation}
where  $u,w$ are the downslope and normal components of velocity. Secondly, shallow flows are assumed, hence local momentum balance equations parallel and normal to the slope can be written
$u,w$ are the downslope and normal components of velocity. Secondly, shallow flows are assumed, hence local momentum balance equations parallel and normal to the slope can be written
 $$\begin{gather} \rho \left( \frac{\partial u}{\partial t} + u\frac{\partial u}{\partial x} + w \frac{\partial u}{\partial z} \right) = \rho g \sin{\theta} + \frac{\partial \tau}{\partial z}, \end{gather}$$
$$\begin{gather} \rho \left( \frac{\partial u}{\partial t} + u\frac{\partial u}{\partial x} + w \frac{\partial u}{\partial z} \right) = \rho g \sin{\theta} + \frac{\partial \tau}{\partial z}, \end{gather}$$ $$\begin{gather}\frac{\partial \sigma}{\partial z} ={-}\rho g \cos{\theta}, \end{gather}$$
$$\begin{gather}\frac{\partial \sigma}{\partial z} ={-}\rho g \cos{\theta}, \end{gather}$$
where  $\tau$ and
$\tau$ and  $\sigma$ are respectively the shear and normal granular stresses, and g is the gravitational acceleration. Transverse velocity variations are neglected, and the flows are assumed sufficiently shallow and wide to neglect the influence of sidewall friction. For some granular flows in thin channels, sidewall friction plays a crucial role, as it controls the flow depth attained at steady state over erodible beds (Taberlet et al. Reference Taberlet, Richard, Valance, Losert, Pasini, Jenkins and Delannay2003; Jop et al. Reference Jop, Forterre and Pouliquen2005). Episodic surface avalanches, however, also occur in wide drums, or in discrete element simulations for which sidewalls are replaced by periodic boundary conditions (Han et al. Reference Han, Feng, Zhang, Yang, Zivkovic and Li2021). This indicates that sidewall friction is not a crucial factor for unsteady, discrete avalanching. Even when frictional sidewalls are present, in this work we will assume for simplicity that the ratio of flow depth to drum width remains small enough for sidewall friction to be negligible.
$\sigma$ are respectively the shear and normal granular stresses, and g is the gravitational acceleration. Transverse velocity variations are neglected, and the flows are assumed sufficiently shallow and wide to neglect the influence of sidewall friction. For some granular flows in thin channels, sidewall friction plays a crucial role, as it controls the flow depth attained at steady state over erodible beds (Taberlet et al. Reference Taberlet, Richard, Valance, Losert, Pasini, Jenkins and Delannay2003; Jop et al. Reference Jop, Forterre and Pouliquen2005). Episodic surface avalanches, however, also occur in wide drums, or in discrete element simulations for which sidewalls are replaced by periodic boundary conditions (Han et al. Reference Han, Feng, Zhang, Yang, Zivkovic and Li2021). This indicates that sidewall friction is not a crucial factor for unsteady, discrete avalanching. Even when frictional sidewalls are present, in this work we will assume for simplicity that the ratio of flow depth to drum width remains small enough for sidewall friction to be negligible.
For the shear stress  $\tau$ within the flow layer, we assume the linearized
$\tau$ within the flow layer, we assume the linearized  $\mu (I)$ rheology (da Cruz et al. Reference da Cruz, Emam, Prochnow, Roux and Chevoir2005)
$\mu (I)$ rheology (da Cruz et al. Reference da Cruz, Emam, Prochnow, Roux and Chevoir2005)
 \begin{equation} \tau = \mu(I)\sigma = (\tan\theta_c + \chi \sqrt{\rho/\rho_S} I) \sigma = \tan\theta_c \sigma + \chi D \sqrt{\rho \sigma} \dot{\gamma}, \end{equation}
\begin{equation} \tau = \mu(I)\sigma = (\tan\theta_c + \chi \sqrt{\rho/\rho_S} I) \sigma = \tan\theta_c \sigma + \chi D \sqrt{\rho \sigma} \dot{\gamma}, \end{equation}
where  $\mu$ is the dimensionless shear to normal stress ratio,
$\mu$ is the dimensionless shear to normal stress ratio,  $\chi$ a dimensionless rheological coefficient,
$\chi$ a dimensionless rheological coefficient,  $\dot {\gamma } = \partial u/\partial z$ the local shear rate and
$\dot {\gamma } = \partial u/\partial z$ the local shear rate and  $I = \dot {\gamma }D/\sqrt {\sigma /\rho _S}$ the inertial number. For sustained shear at very slow shear rate,
$I = \dot {\gamma }D/\sqrt {\sigma /\rho _S}$ the inertial number. For sustained shear at very slow shear rate,  $I \ll 1$, the ratio of shear to normal stress therefore reduces to
$I \ll 1$, the ratio of shear to normal stress therefore reduces to  $\tau /\sigma = \tan \theta _c$, which defines the critical angle of internal friction
$\tau /\sigma = \tan \theta _c$, which defines the critical angle of internal friction  $\theta _c$. As
$\theta _c$. As  $\dot {\gamma }$ increases,
$\dot {\gamma }$ increases,  $\tau$ increases proportionately, with an effective viscosity
$\tau$ increases proportionately, with an effective viscosity  $\chi D \sqrt {\rho \sigma }$ that varies as the square root of the normal stress
$\chi D \sqrt {\rho \sigma }$ that varies as the square root of the normal stress  $\sigma$. For frictional spheres, experiments (Jop et al. Reference Jop, Forterre and Pouliquen2005; Tapia et al. Reference Tapia, Pouliquen and Guazzelli2019) and discrete element simulations (Azéma & Radjaï Reference Azéma and Radjaï2014) show that the rheological coefficient does not vary greatly with particle properties, and takes the approximate value
$\sigma$. For frictional spheres, experiments (Jop et al. Reference Jop, Forterre and Pouliquen2005; Tapia et al. Reference Tapia, Pouliquen and Guazzelli2019) and discrete element simulations (Azéma & Radjaï Reference Azéma and Radjaï2014) show that the rheological coefficient does not vary greatly with particle properties, and takes the approximate value  $\chi \approx 1$. For frictionless particles, simulations with two-dimensional (Bouzid et al. Reference Bouzid, Trulsson, Claudin, Clément and Andreotti2013) and three-dimensional grains (Dumont et al. Reference Dumont, Bonneau, Salez, Raphaël and Damman2023) indicate that, instead of a linear relationship, the rate-dependent component of the shear stress varies roughly with the square root of the shear rate. In this work, we restrict our attention to frictional spheres.
$\chi \approx 1$. For frictionless particles, simulations with two-dimensional (Bouzid et al. Reference Bouzid, Trulsson, Claudin, Clément and Andreotti2013) and three-dimensional grains (Dumont et al. Reference Dumont, Bonneau, Salez, Raphaël and Damman2023) indicate that, instead of a linear relationship, the rate-dependent component of the shear stress varies roughly with the square root of the shear rate. In this work, we restrict our attention to frictional spheres.
Boundary conditions at the surface and at the base of the flowing layer are formulated as follows. First, we assume zero flux across the free surface  $z = {\tilde {z}}$, hence the kinematic boundary condition
$z = {\tilde {z}}$, hence the kinematic boundary condition
 \begin{equation} \frac{ \partial {\tilde{z}} }{\partial t} + {\tilde{u}} \frac{\partial {\tilde{z}}}{\partial x} = {\tilde{w}}, \end{equation}
\begin{equation} \frac{ \partial {\tilde{z}} }{\partial t} + {\tilde{u}} \frac{\partial {\tilde{z}}}{\partial x} = {\tilde{w}}, \end{equation}
where  ${\tilde {u}}, {\tilde {w}}$ denote the velocity components along the free surface. At the surface, we also assume no stress, or
${\tilde {u}}, {\tilde {w}}$ denote the velocity components along the free surface. At the surface, we also assume no stress, or  $\tilde {\tau } = \tilde {\sigma } = 0$. The normal stress then integrates to
$\tilde {\tau } = \tilde {\sigma } = 0$. The normal stress then integrates to  $\sigma = \rho g_{_{\perp }} y$, where
$\sigma = \rho g_{_{\perp }} y$, where  $g_{_{\perp }} = g \cos \theta _c$ and
$g_{_{\perp }} = g \cos \theta _c$ and  $y = {\tilde {z}} - z$ denotes the depth below free surface. Assuming the rheology (2.4), the shear rate must therefore vanish at the upper free surface. This is at variance with experiments (Capart et al. Reference Capart, Hung and Stark2015) and discrete element simulations (Parez et al. Reference Parez, Aharonov and Toussaint2016), which show instead a finite shear rate at the top. The resulting velocity profiles, however, remain in relatively close agreement.
$y = {\tilde {z}} - z$ denotes the depth below free surface. Assuming the rheology (2.4), the shear rate must therefore vanish at the upper free surface. This is at variance with experiments (Capart et al. Reference Capart, Hung and Stark2015) and discrete element simulations (Parez et al. Reference Parez, Aharonov and Toussaint2016), which show instead a finite shear rate at the top. The resulting velocity profiles, however, remain in relatively close agreement.
At the base, we adopt the new boundary conditions proposed recently by Capart (Reference Capart2023) for granular flows over brittle beds. Flow is assumed to take place over an erodible granular substrate, or bed, with which grains can be exchanged. The basal boundary  $z = {\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {z}}$, representing the interface between the flow and bed, is defined as the uppermost locus where
$z = {\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {z}}$, representing the interface between the flow and bed, is defined as the uppermost locus where  ${\rm \Delta} u = 0$, with
${\rm \Delta} u = 0$, with  ${\rm \Delta} u$ denoting the granular velocity in excess of the bed velocity due to rigid body rotation. For slow drum rotation rates, the bed rotation velocity can be neglected, as it is much smaller than the velocity of avalanching grains. Regardless, the decrease of the excess velocity
${\rm \Delta} u$ denoting the granular velocity in excess of the bed velocity due to rigid body rotation. For slow drum rotation rates, the bed rotation velocity can be neglected, as it is much smaller than the velocity of avalanching grains. Regardless, the decrease of the excess velocity  ${\rm \Delta} u$ to zero at a well-defined finite depth is again an idealization, as actual velocity profiles typically show a more gradual exponential decay or power law decrease to zero at the base.
${\rm \Delta} u$ to zero at a well-defined finite depth is again an idealization, as actual velocity profiles typically show a more gradual exponential decay or power law decrease to zero at the base.
Subject to this idealization, the basal interface constitutes a sharply defined moving boundary that evolves according to
 \begin{equation} \frac{\partial {\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{z}}}{\partial t} - {\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{w}} ={-} e + d. \end{equation}
\begin{equation} \frac{\partial {\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{z}}}{\partial t} - {\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{w}} ={-} e + d. \end{equation}
On the left-hand side,  ${\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {w}}$ is the velocity at which the basal substrate uplifts (
${\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {w}}$ is the velocity at which the basal substrate uplifts ( ${\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {w}} > 0$) or subsides (
${\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {w}} > 0$) or subsides ( ${\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {w}} < 0$) due to drum rotation or sandbox tilting. On the right-hand side,
${\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {w}} < 0$) due to drum rotation or sandbox tilting. On the right-hand side,  $e \geq 0$ is the rate of erosion or entrainment and
$e \geq 0$ is the rate of erosion or entrainment and  $d \geq 0$ the rate of deposition or detrainment, both assumed positive. Whether entrainment (
$d \geq 0$ the rate of deposition or detrainment, both assumed positive. Whether entrainment ( $e>0$) or detrainment (
$e>0$) or detrainment ( $d>0$) can occur then depends on the shear stress
$d>0$) can occur then depends on the shear stress  $\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\tau }$ and shear rate
$\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\tau }$ and shear rate  $\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}$ attained at the base of the flow layer. For erosion to occur (
$\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}$ attained at the base of the flow layer. For erosion to occur ( $e>0$), the basal shear stress must overcome the erosion resistance
$e>0$), the basal shear stress must overcome the erosion resistance
 \begin{equation} \tau_e = \tan\theta_e \sigma, \end{equation}
\begin{equation} \tau_e = \tan\theta_e \sigma, \end{equation}
where  $\theta _e > \theta _c$ is an angle of friction describing the bed resistance to erosion: a greater shear stress is needed to unjam bed grains than to keep them flowing at a slow shear rate (Atman et al. Reference Atman, Claudin, Combe and Martins2014; Farain & Bonn Reference Farain and Bonn2023). Note that the angle
$\theta _e > \theta _c$ is an angle of friction describing the bed resistance to erosion: a greater shear stress is needed to unjam bed grains than to keep them flowing at a slow shear rate (Atman et al. Reference Atman, Claudin, Combe and Martins2014; Farain & Bonn Reference Farain and Bonn2023). Note that the angle  $\theta _e$, like the failure angle
$\theta _e$, like the failure angle  $\theta _f$, does not take a unique value. Instead, it may depend on system history and exhibit random variation from one avalanche to the next. For a single avalanche, however, we will assume
$\theta _f$, does not take a unique value. Instead, it may depend on system history and exhibit random variation from one avalanche to the next. For a single avalanche, however, we will assume  $\theta _e$ to be constant. Similar to our assumed gap between
$\theta _e$ to be constant. Similar to our assumed gap between  $\theta _e$ and
$\theta _e$ and  $\theta _c$, Dumont et al. (Reference Dumont, Soulard, Salez, Raphaël and Damman2020) conducted discrete element simulations of heap and inclined plane flows of frictional spheres in which they found a significant gap between erosion and sedimentation angles.
$\theta _c$, Dumont et al. (Reference Dumont, Soulard, Salez, Raphaël and Damman2020) conducted discrete element simulations of heap and inclined plane flows of frictional spheres in which they found a significant gap between erosion and sedimentation angles.
Accordingly, when  $e>0$, the shear stress at the base of the flowing layer must satisfy
$e>0$, the shear stress at the base of the flowing layer must satisfy
 \begin{equation} \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\tau} = \tan\theta_e \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\sigma} = \tan\theta_c \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\sigma} + \chi D \sqrt{ \rho \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\sigma}}\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}}, \end{equation}
\begin{equation} \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\tau} = \tan\theta_e \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\sigma} = \tan\theta_c \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\sigma} + \chi D \sqrt{ \rho \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\sigma}}\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}}, \end{equation}
where  $\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\sigma } = \rho g_{_{\perp }} h$ is the normal stress at the base. For entrainment to occur, the requisite shear stress must be provided by rapidly sheared near-bed grains. Thus the basal shear rate has to reach the maximal value
$\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\sigma } = \rho g_{_{\perp }} h$ is the normal stress at the base. For entrainment to occur, the requisite shear stress must be provided by rapidly sheared near-bed grains. Thus the basal shear rate has to reach the maximal value
 \begin{equation} \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}}_{max} = \frac{\tan\theta_e - \tan\theta_c}{\chi D} \sqrt{ g_{_{{\perp}}} h }, \end{equation}
\begin{equation} \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}}_{max} = \frac{\tan\theta_e - \tan\theta_c}{\chi D} \sqrt{ g_{_{{\perp}}} h }, \end{equation}
proportional to the difference between the two friction coefficients  $\tan \theta _e$ and
$\tan \theta _e$ and  $\tan \theta _c$. For detrainment to occur (
$\tan \theta _c$. For detrainment to occur ( $d>0$), on the other hand, we assume that the basal shear rate must decrease to zero. The entrainment and detrainment rates
$d>0$), on the other hand, we assume that the basal shear rate must decrease to zero. The entrainment and detrainment rates  $e,d$ are therefore governed by the following complementary inequalities
$e,d$ are therefore governed by the following complementary inequalities
 $$\begin{gather} e \geq 0,\quad \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}} \leq \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}}_{max},\quad (\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}} - \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}}_{max})e = 0, \end{gather}$$
$$\begin{gather} e \geq 0,\quad \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}} \leq \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}}_{max},\quad (\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}} - \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}}_{max})e = 0, \end{gather}$$ $$\begin{gather}d \geq 0,\quad \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}} \geq 0,\quad \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}} d = 0. \end{gather}$$
$$\begin{gather}d \geq 0,\quad \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}} \geq 0,\quad \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}} d = 0. \end{gather}$$By eroding or depositing grains as needed, the flow layer thus maintains its basal shear rate within a finite range, bracketed by the following lower and upper bounds:
 \begin{equation} 0 \leq \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}} \leq \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}}_{max}. \end{equation}
\begin{equation} 0 \leq \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}} \leq \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}}_{max}. \end{equation}
Conversely, these bounds must be attained for the flow to erode or deposit grains. If the bounds are not attained,  $0 < \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }} < \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}_{max}$, we assume that the flow can neither entrain or detrain, and call this situation bypass. These three possible basal behaviours – entrainment, bypass and detrainment – are illustrated in figure 2. As the flow evolves over time, the conditions (2.10a–c) and (2.10a–c) allow the flow to transition continuously between these three behaviours.
$0 < \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }} < \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}_{max}$, we assume that the flow can neither entrain or detrain, and call this situation bypass. These three possible basal behaviours – entrainment, bypass and detrainment – are illustrated in figure 2. As the flow evolves over time, the conditions (2.10a–c) and (2.10a–c) allow the flow to transition continuously between these three behaviours.

Figure 2. Three possible solution behaviours dependent on the basal shear rate: (a) entrainment, possible only when the shear rate is maximal (dashed blue line); (b) bypass, when the basal shear rate is intermediate; (c) detrainment, possible only when the basal shear rate is zero (dashed magenta line). Arrows up or down denote basal interface motions, and a cross the absence of such motion.
2.2. Reduced equations
Integrated over depth, the local continuity equation (2.1) yields an evolution equation for the surface profile  ${\tilde {z}}(x,t)$
${\tilde {z}}(x,t)$
 \begin{equation} \frac{\partial {\tilde{z}}}{\partial t} + \frac{ \partial q }{\partial x} = {\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{w}}, \end{equation}
\begin{equation} \frac{\partial {\tilde{z}}}{\partial t} + \frac{ \partial q }{\partial x} = {\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{w}}, \end{equation}
where  $q = \int u\,{\rm d} z$ is the discharge per unit width. Upon invoking (2.6), we can then deduce
$q = \int u\,{\rm d} z$ is the discharge per unit width. Upon invoking (2.6), we can then deduce
 \begin{equation} \frac{\partial h}{\partial t} + \frac{\partial q}{\partial x} = e - d. \end{equation}
\begin{equation} \frac{\partial h}{\partial t} + \frac{\partial q}{\partial x} = e - d. \end{equation}
The erosion and deposition rates  $e,d$ thus affect the evolution of the flow thickness
$e,d$ thus affect the evolution of the flow thickness  $h$, but do not directly affect the evolution of the free surface elevation
$h$, but do not directly affect the evolution of the free surface elevation  ${\tilde {z}}$. For application to rotating drums, the basal velocity
${\tilde {z}}$. For application to rotating drums, the basal velocity  ${\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {w}}$ induced by drum rotation can be expressed
${\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {w}}$ induced by drum rotation can be expressed
 \begin{equation} {\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{w}} ={-}\varOmega x, \end{equation}
\begin{equation} {\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{w}} ={-}\varOmega x, \end{equation}
where  $\varOmega$ is the drum rotation rate, and with the origin
$\varOmega$ is the drum rotation rate, and with the origin  $x=0$ placed at mid-slope. When the drum is slowly rotated, episodic avalanches occur, during which the surface inclination drops rapidly, alternating with periods of no flow and gradual re-steepening. Both during and between slope relaxation events, experiments indicate that the surface profile
$x=0$ placed at mid-slope. When the drum is slowly rotated, episodic avalanches occur, during which the surface inclination drops rapidly, alternating with periods of no flow and gradual re-steepening. Both during and between slope relaxation events, experiments indicate that the surface profile  ${\tilde {z}}(x,t)$ can be well approximated by a straight line of time-varying inclination
${\tilde {z}}(x,t)$ can be well approximated by a straight line of time-varying inclination
 \begin{equation} {\tilde{z}}(x,t) ={-} (\theta(t)-\theta_c)x. \end{equation}
\begin{equation} {\tilde{z}}(x,t) ={-} (\theta(t)-\theta_c)x. \end{equation}Substitution of (2.15) and (2.16) into (2.13) produces
 \begin{equation} \frac{\partial q}{\partial x} = \left(\frac{{\rm d}\theta}{{\rm d} t} - \varOmega\right) x. \end{equation}
\begin{equation} \frac{\partial q}{\partial x} = \left(\frac{{\rm d}\theta}{{\rm d} t} - \varOmega\right) x. \end{equation}
Integration subject to boundary conditions  $q=0$ at
$q=0$ at  $x = \pm L/2$ then yields
$x = \pm L/2$ then yields
 \begin{equation} q(x,t) = \frac{(L/2)^2 - x^2}{2}\left(\varOmega-\frac{{\rm d}\theta}{{\rm d} t}\right). \end{equation}
\begin{equation} q(x,t) = \frac{(L/2)^2 - x^2}{2}\left(\varOmega-\frac{{\rm d}\theta}{{\rm d} t}\right). \end{equation}
By assuming that the free surface remains perfectly straight, with a time-dependent but uniform inclination, we therefore constrain the flow discharge to evolve synchronously everywhere along the slope. Thus we neglect the local surface irregularities and propagation dynamics that can be observed in both experiments (Balmforth & McElwaine Reference Balmforth and McElwaine2018) and discrete element simulations (Han et al. Reference Han, Feng, Zhang, Yang, Zivkovic and Li2021). In what follows, we will assume very slow steepening rates ( $\varOmega \ll -{\rm d}\theta /{\rm d} t$) and focus on the comparatively fast slope relaxation events. Applying (2.18) at mid-slope then yields for the inclination
$\varOmega \ll -{\rm d}\theta /{\rm d} t$) and focus on the comparatively fast slope relaxation events. Applying (2.18) at mid-slope then yields for the inclination  $\theta (t)$ the ordinary differential equation (Courrech du Pont et al. Reference Courrech du Pont, Fischer, Gondret, Perrin and Rabaud2005)
$\theta (t)$ the ordinary differential equation (Courrech du Pont et al. Reference Courrech du Pont, Fischer, Gondret, Perrin and Rabaud2005)
 \begin{equation} \frac{{\rm d}\theta}{{\rm d} t} ={-} \frac{8}{L^2} q(0,t), \end{equation}
\begin{equation} \frac{{\rm d}\theta}{{\rm d} t} ={-} \frac{8}{L^2} q(0,t), \end{equation}
involving only the discharge  $q(0,t)$ at mid-slope (
$q(0,t)$ at mid-slope ( $x=0$), where
$x=0$), where  ${\tilde {z}}(0,t) = 0$. At mid-slope, moreover,
${\tilde {z}}(0,t) = 0$. At mid-slope, moreover,  $\partial q/\partial x = 0$ and the flow is approximately uniform, so that convective acceleration terms can be safely neglected. The local momentum balance equation (2.2) can therefore be approximated there by
$\partial q/\partial x = 0$ and the flow is approximately uniform, so that convective acceleration terms can be safely neglected. The local momentum balance equation (2.2) can therefore be approximated there by
 \begin{equation} \rho \frac{\partial u}{\partial t} = \rho g \sin{\theta} + \frac{\partial \tau}{\partial z}. \end{equation}
\begin{equation} \rho \frac{\partial u}{\partial t} = \rho g \sin{\theta} + \frac{\partial \tau}{\partial z}. \end{equation}Substitution of the rheology (2.4) then yields
 \begin{equation} \frac{\partial u}{\partial t} = g_{_{{\perp}}} (\tan\theta-\tan\theta_c) + g_{_{{\perp}}}^{1/2} \chi D \frac{\partial}{\partial y}\left( y^{1/2} \frac{\partial u}{\partial y}\right), \end{equation}
\begin{equation} \frac{\partial u}{\partial t} = g_{_{{\perp}}} (\tan\theta-\tan\theta_c) + g_{_{{\perp}}}^{1/2} \chi D \frac{\partial}{\partial y}\left( y^{1/2} \frac{\partial u}{\partial y}\right), \end{equation}
where it is convenient to use the depth coordinate  $y = {\tilde {z}}-z$ instead of
$y = {\tilde {z}}-z$ instead of  $z$. Upon defining the excess slope
$z$. Upon defining the excess slope  $S(t)$ by
$S(t)$ by
 \begin{equation} S(t) = \tan\theta(t) - \tan\theta_c, \end{equation}
\begin{equation} S(t) = \tan\theta(t) - \tan\theta_c, \end{equation}
we can approximate  ${\rm d}\theta /{\rm d} t = \cos ^2\theta _c \,{\rm d} S/{\rm d} t$. We can therefore describe the relaxation of slopes of finite length using two coupled equations. The first is an ordinary differential equation for the excess slope
${\rm d}\theta /{\rm d} t = \cos ^2\theta _c \,{\rm d} S/{\rm d} t$. We can therefore describe the relaxation of slopes of finite length using two coupled equations. The first is an ordinary differential equation for the excess slope
 \begin{equation} \cos^2\theta_c \frac{{\rm d} S}{{\rm d} t} ={-} \frac{8}{L^2} \int_0^h u {{\rm d}y}, \end{equation}
\begin{equation} \cos^2\theta_c \frac{{\rm d} S}{{\rm d} t} ={-} \frac{8}{L^2} \int_0^h u {{\rm d}y}, \end{equation}
featuring on the right-hand side the integral of the velocity profile at mid-slope,  $u(y,t)$. The second is a partial differential equation for this velocity profile
$u(y,t)$. The second is a partial differential equation for this velocity profile
 \begin{equation} \frac{\partial u}{\partial t} = g_{_{{\perp}}} S(t) + g_{_{{\perp}}}^{1/2} \chi D \frac{\partial}{\partial y}\left(y^{1/2} \frac{\partial u}{\partial y}\right)\quad (0 < y < h), \end{equation}
\begin{equation} \frac{\partial u}{\partial t} = g_{_{{\perp}}} S(t) + g_{_{{\perp}}}^{1/2} \chi D \frac{\partial}{\partial y}\left(y^{1/2} \frac{\partial u}{\partial y}\right)\quad (0 < y < h), \end{equation}
where the excess slope  $S(t)$ intervenes as a time-dependent forcing term. The velocity profile is subject to three boundary conditions, one at the free surface and two at the base
$S(t)$ intervenes as a time-dependent forcing term. The velocity profile is subject to three boundary conditions, one at the free surface and two at the base
 $$\begin{gather} \frac{\partial u}{\partial y} = 0\quad (y=0), \end{gather}$$
$$\begin{gather} \frac{\partial u}{\partial y} = 0\quad (y=0), \end{gather}$$ $$\begin{gather}u = 0,\quad 0\leq{-}\frac{\partial u}{\partial y} \leq \frac{\tan\theta_e-\tan\theta_c}{\chi D}\sqrt{g_{_{{\perp}}} h}\quad (y=h). \end{gather}$$
$$\begin{gather}u = 0,\quad 0\leq{-}\frac{\partial u}{\partial y} \leq \frac{\tan\theta_e-\tan\theta_c}{\chi D}\sqrt{g_{_{{\perp}}} h}\quad (y=h). \end{gather}$$
Two boundary conditions are needed at the base because the time-evolving flow thickness  $h(t)$ is also unknown. For the initial conditions, finally, we assume that the granular slope starts from rest, at failure time
$h(t)$ is also unknown. For the initial conditions, finally, we assume that the granular slope starts from rest, at failure time  $t_f$ and failure angle
$t_f$ and failure angle  $\theta _f$, with a flow layer of zero initial thickness
$\theta _f$, with a flow layer of zero initial thickness  $h_f = 0$.
$h_f = 0$.
Assuming slow rotation rates, note that the equations derived here apply to arbitrary drum fill level  $l$, the influence of which we capture via the slope length
$l$, the influence of which we capture via the slope length  $L$. Following Gray (Reference Gray2001), we define the fill level
$L$. Following Gray (Reference Gray2001), we define the fill level  $l$ as the offset distance of the flat free surface away from the drum centre. The slope length is then
$l$ as the offset distance of the flat free surface away from the drum centre. The slope length is then  $L = 2\sqrt { R^2 - l^2}$, and reduces to
$L = 2\sqrt { R^2 - l^2}$, and reduces to  $L = 2R$ when the drum is half-filled (
$L = 2R$ when the drum is half-filled ( $l = 0$). Provided that the correct slope length
$l = 0$). Provided that the correct slope length  $L$ is used, all our results continue to hold when
$L$ is used, all our results continue to hold when  $l \neq 0$, motivating our choice of
$l \neq 0$, motivating our choice of  $L$ instead of
$L$ instead of  $R$ as our defining length. In § 5, we will need this flexibility to apply the theory to the discrete element simulations of Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021), for which the drum was not half-filled. Prior to solving the equations, it is useful to first cast them in dimensionless form. For this purpose, a scaling analysis is conducted in the next section.
$R$ as our defining length. In § 5, we will need this flexibility to apply the theory to the discrete element simulations of Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021), for which the drum was not half-filled. Prior to solving the equations, it is useful to first cast them in dimensionless form. For this purpose, a scaling analysis is conducted in the next section.
2.3. Scaling analysis
To make the equations dimensionless, let us adopt the slope length  $L$ as length scale, and
$L$ as length scale, and  $S_e = \tan \theta _e-\tan \theta _c$ as slope scale. We then seek time, velocity and depth scales
$S_e = \tan \theta _e-\tan \theta _c$ as slope scale. We then seek time, velocity and depth scales  $T$,
$T$,  $U$ and
$U$ and  $H$ that balance the different terms of the reduced equations. From (2.23), we deduce
$H$ that balance the different terms of the reduced equations. From (2.23), we deduce
 \begin{equation} \cos^2\theta_c \frac{S_e}{T} = \frac{HU}{L^2}. \end{equation}
\begin{equation} \cos^2\theta_c \frac{S_e}{T} = \frac{HU}{L^2}. \end{equation}From (2.24), on the other hand, we get
 \begin{equation} \frac{U}{T} = g_{_{{\perp}}} S_e = \frac{g_{_{{\perp}}}^{1/2}\chi D U}{H^{3/2}}. \end{equation}
\begin{equation} \frac{U}{T} = g_{_{{\perp}}} S_e = \frac{g_{_{{\perp}}}^{1/2}\chi D U}{H^{3/2}}. \end{equation}For the depth scale, we obtain
 \begin{equation} H = (\chi D L\cos\theta_c)^{1/2}. \end{equation}
\begin{equation} H = (\chi D L\cos\theta_c)^{1/2}. \end{equation}
The depth scale  $H$ is therefore proportional to the geometric mean of the grain diameter
$H$ is therefore proportional to the geometric mean of the grain diameter  $D$ and slope length
$D$ and slope length  $L$, a surprisingly simple result that does not seem to have been reported previously. For the time scale, we deduce
$L$, a surprisingly simple result that does not seem to have been reported previously. For the time scale, we deduce
 \begin{equation} T = \frac{(L\cos\theta_c)^{3/4}}{g_{_{{\perp}}}^{1/2}(\chi D)^{1/4}}, \end{equation}
\begin{equation} T = \frac{(L\cos\theta_c)^{3/4}}{g_{_{{\perp}}}^{1/2}(\chi D)^{1/4}}, \end{equation}
proportional to the slope length  $L$ raised to the power
$L$ raised to the power  $3/4$, and inversely proportional to the grain diameter
$3/4$, and inversely proportional to the grain diameter  $D$ to the power
$D$ to the power  $1/4$. For the velocity scale, finally, we get
$1/4$. For the velocity scale, finally, we get
 \begin{equation} U = g_{_{{\perp}}}^{1/2} \frac{(L\cos\theta_c)^{3/4}}{(\chi D)^{1/4}}S_e, \end{equation}
\begin{equation} U = g_{_{{\perp}}}^{1/2} \frac{(L\cos\theta_c)^{3/4}}{(\chi D)^{1/4}}S_e, \end{equation}
proportional to the slope scale  $S_e$. We use these scales to define the dimensionless variables
$S_e$. We use these scales to define the dimensionless variables
 \begin{equation} y^* = \frac{y}{H},\quad h^* = \frac{h}{H},\quad t^*=\frac{t-t_f}{T},\quad S^* = \frac{S}{S_e},\quad u^* = \frac{u}{U},\quad \dot{\gamma}^* = \frac{\dot{\gamma}}{U/H}. \end{equation}
\begin{equation} y^* = \frac{y}{H},\quad h^* = \frac{h}{H},\quad t^*=\frac{t-t_f}{T},\quad S^* = \frac{S}{S_e},\quad u^* = \frac{u}{U},\quad \dot{\gamma}^* = \frac{\dot{\gamma}}{U/H}. \end{equation}The governing equations then become, in dimensionless form,
 $$\begin{gather} \frac{{\rm d} S^*}{{\rm d} t^*} ={-}8 \int_0^{h^*} u^* \,{{\rm d}y}^*, \end{gather}$$
$$\begin{gather} \frac{{\rm d} S^*}{{\rm d} t^*} ={-}8 \int_0^{h^*} u^* \,{{\rm d}y}^*, \end{gather}$$ $$\begin{gather}\frac{\partial u^*}{\partial t^*} = S^* + \frac{\partial}{\partial y^*}\left( y^{*1/2} \frac{\partial u^*}{\partial y^*} \right), \end{gather}$$
$$\begin{gather}\frac{\partial u^*}{\partial t^*} = S^* + \frac{\partial}{\partial y^*}\left( y^{*1/2} \frac{\partial u^*}{\partial y^*} \right), \end{gather}$$with boundary conditions
 $$\begin{gather} \frac{\partial u^*}{\partial y^*}=0\quad (y^* = 0), \end{gather}$$
$$\begin{gather} \frac{\partial u^*}{\partial y^*}=0\quad (y^* = 0), \end{gather}$$ $$\begin{gather}u^*=0,\quad 0 \leq{-}\frac{\partial u^*}{\partial y^*} \leq h^{*1/2}\quad (y^* = h^*), \end{gather}$$
$$\begin{gather}u^*=0,\quad 0 \leq{-}\frac{\partial u^*}{\partial y^*} \leq h^{*1/2}\quad (y^* = h^*), \end{gather}$$and initial conditions
 \begin{equation} h^* = 0,\quad S^* = S^*_f = \frac{\tan\theta_f-\tan\theta_c}{\tan\theta_e-\tan\theta_c} \approx \frac{\theta_f-\theta_c}{\theta_e-\theta_c}\quad (t^*=t^*_f = 0). \end{equation}
\begin{equation} h^* = 0,\quad S^* = S^*_f = \frac{\tan\theta_f-\tan\theta_c}{\tan\theta_e-\tan\theta_c} \approx \frac{\theta_f-\theta_c}{\theta_e-\theta_c}\quad (t^*=t^*_f = 0). \end{equation}
The number  $S^*_f$, the only dimensionless number that remains, represents the over-steepening of the slope at failure. It is defined as the ratio of excess slope at failure to excess resistance to erosion. Remarkably, the failure and erosion resistance inclinations
$S^*_f$, the only dimensionless number that remains, represents the over-steepening of the slope at failure. It is defined as the ratio of excess slope at failure to excess resistance to erosion. Remarkably, the failure and erosion resistance inclinations  $\theta _f$ and
$\theta _f$ and  $\theta _e$ affect the dimensionless dynamics of discrete avalanches only jointly, via this number
$\theta _e$ affect the dimensionless dynamics of discrete avalanches only jointly, via this number  $S^*_f$. Analogous to the brittleness index introduced by Bishop (Reference Bishop1971), it provides a dimensionless measure of the brittleness, or degree of metastability of the slope.
$S^*_f$. Analogous to the brittleness index introduced by Bishop (Reference Bishop1971), it provides a dimensionless measure of the brittleness, or degree of metastability of the slope.
Mathematically, we obtain a rather unusual system coupling one integro-differential equation for the slope  $S^*(t^*)$ (2.33), with one partial differential equation for the velocity profile
$S^*(t^*)$ (2.33), with one partial differential equation for the velocity profile  $u^*(y^*,t^*)$ (2.34). To solve this system, we need to examine in sequence three distinct stages, characterized respectively by entrainment, bypass and detrainment. In the next section, analytical techniques will be used to derive solutions for each stage.
$u^*(y^*,t^*)$ (2.34). To solve this system, we need to examine in sequence three distinct stages, characterized respectively by entrainment, bypass and detrainment. In the next section, analytical techniques will be used to derive solutions for each stage.
3. Solution derivation
3.1. Entrainment stage
Upon failure, the avalanching layer must first entrain grains from the underlying substrate. For erosion to occur, the basal shear rate must attain its upper limit
 \begin{equation} {-}\frac{\partial u^*}{\partial y^*}(y^*=h^*) = \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}}^*_{max} = h^{*1/2}. \end{equation}
\begin{equation} {-}\frac{\partial u^*}{\partial y^*}(y^*=h^*) = \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}}^*_{max} = h^{*1/2}. \end{equation}By analogy with the constant slope case treated in Capart (Reference Capart2023), we seek an exact similarity solution whereby the flowing layer simultaneously thickens and accelerates, while maintaining a velocity profile of Bagnold shape. The time-evolving velocity profile satisfying the boundary conditions at the surface and at the base is then
 \begin{equation} u^*(y^*,t^*) =\begin{cases} \frac{2}{3}(h^*(t^*)^{3/2}-y^{*3/2}), & 0\leq y^* \leq h^*(t^*),\\ 0, & h^*(t^*)\leq y^*, \end{cases} \end{equation}
\begin{equation} u^*(y^*,t^*) =\begin{cases} \frac{2}{3}(h^*(t^*)^{3/2}-y^{*3/2}), & 0\leq y^* \leq h^*(t^*),\\ 0, & h^*(t^*)\leq y^*, \end{cases} \end{equation}
where  $h^*(t^*)$ is the flow thickness evolution, yet to be determined. Substituting this ansatz into the mass and momentum balance equations (2.33) and (2.34) yields
$h^*(t^*)$ is the flow thickness evolution, yet to be determined. Substituting this ansatz into the mass and momentum balance equations (2.33) and (2.34) yields
 $$\begin{gather} \frac{{\rm d} S^*}{{\rm d} t^*} ={-}\frac{16}{5}h^{*5/2}, \end{gather}$$
$$\begin{gather} \frac{{\rm d} S^*}{{\rm d} t^*} ={-}\frac{16}{5}h^{*5/2}, \end{gather}$$ $$\begin{gather}h^{*1/2}\frac{{\rm d} h^*}{{\rm d} t^*} = S^* - 1, \end{gather}$$
$$\begin{gather}h^{*1/2}\frac{{\rm d} h^*}{{\rm d} t^*} = S^* - 1, \end{gather}$$
which form a pair of nonlinear ordinary differential equations (ODEs) for the coupled time evolution of the avalanche slope  $S^*(t^*)$ and thickness
$S^*(t^*)$ and thickness  $h^*(t^*)$. Note that the Bagnold velocity profile does not represent an extra assumption or approximation on our part, nor is it restricted to flows over a non-erodible base. For the entrainment stage, the time-evolving Bagnold profile (3.2) is the exact solution to the assumed governing equations, boundary and initial conditions, provided that the two ODEs (3.3) and (3.4) are satisfied. This was derived step by step in Capart (Reference Capart2023), and can be checked by direct substitution into (2.33) to (2.37). During bypass and detrainment, the Bagnold shape no longer applies and the velocity profile deforms into a sigmoidal shape.
$h^*(t^*)$. Note that the Bagnold velocity profile does not represent an extra assumption or approximation on our part, nor is it restricted to flows over a non-erodible base. For the entrainment stage, the time-evolving Bagnold profile (3.2) is the exact solution to the assumed governing equations, boundary and initial conditions, provided that the two ODEs (3.3) and (3.4) are satisfied. This was derived step by step in Capart (Reference Capart2023), and can be checked by direct substitution into (2.33) to (2.37). During bypass and detrainment, the Bagnold shape no longer applies and the velocity profile deforms into a sigmoidal shape.
To solve the equations, the time variable can be eliminated from (3.4) by using the chain rule together with (3.3), yielding the separable ODE
 \begin{equation} h^{*1/2}\frac{{\rm d} h^*}{{\rm d} S^*}\frac{{\rm d} S^*}{{\rm d} t^*} ={-}\frac{16}{5}h^{*3}\frac{{\rm d} h^*}{{\rm d} S^*} = S^*-1. \end{equation}
\begin{equation} h^{*1/2}\frac{{\rm d} h^*}{{\rm d} S^*}\frac{{\rm d} S^*}{{\rm d} t^*} ={-}\frac{16}{5}h^{*3}\frac{{\rm d} h^*}{{\rm d} S^*} = S^*-1. \end{equation}
This can be integrated with initial conditions  $S^* = S^*_f$ and
$S^* = S^*_f$ and  $h^*=0$ at time
$h^*=0$ at time  $t^*_f = 0$, to get
$t^*_f = 0$, to get
 \begin{equation} h^*(S^*) = \left(\tfrac{5}{8}\right)^{1/4}((S^*_f-1)^2-(S^*-1)^2)^{1/4}. \end{equation}
\begin{equation} h^*(S^*) = \left(\tfrac{5}{8}\right)^{1/4}((S^*_f-1)^2-(S^*-1)^2)^{1/4}. \end{equation}
The flow layer thickness increases until  $S^* = S^*_e = 1$, where it saturates at the extremal value
$S^* = S^*_e = 1$, where it saturates at the extremal value
 \begin{equation} h^*_e = \left(\tfrac{5}{8}\right)^{1/4} (S^*_f-1)^{1/2}, \end{equation}
\begin{equation} h^*_e = \left(\tfrac{5}{8}\right)^{1/4} (S^*_f-1)^{1/2}, \end{equation}retained during the ensuing bypass stage. By integrating the profile (3.2) over depth, we can also calculate the discharge evolution
 \begin{equation} q^*(S^*) = \tfrac{2}{5}\left(\tfrac{5}{8}\right)^{5/8}((S^*_f-1)^2-(S^*-1)^2)^{5/8}. \end{equation}
\begin{equation} q^*(S^*) = \tfrac{2}{5}\left(\tfrac{5}{8}\right)^{5/8}((S^*_f-1)^2-(S^*-1)^2)^{5/8}. \end{equation}
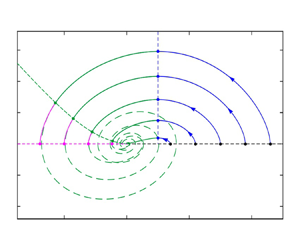
The resulting orbits are shown in figure 3(a), for five different values of  $S^*_f$. The discharge peaks at the end of the entrainment stage (
$S^*_f$. The discharge peaks at the end of the entrainment stage ( $S^* = S^*_e =1$), reaching the maximum value
$S^* = S^*_e =1$), reaching the maximum value
 \begin{equation} q^*_e = \tfrac{2}{5}\left(\tfrac{5}{8}\right)^{5/8} (S^*_f-1)^{5/4}. \end{equation}
\begin{equation} q^*_e = \tfrac{2}{5}\left(\tfrac{5}{8}\right)^{5/8} (S^*_f-1)^{5/4}. \end{equation}
Upon defining  $S^{\prime } = S^*-1$,
$S^{\prime } = S^*-1$,  $\hat {S}^{\prime } = S^{\prime }/S_f^{\prime }$ and
$\hat {S}^{\prime } = S^{\prime }/S_f^{\prime }$ and  $\hat {q}=q^*/q^*_e$, the slope-discharge relationship can also be written
$\hat {q}=q^*/q^*_e$, the slope-discharge relationship can also be written
 \begin{equation} \hat{S}^{\prime 2} + (\hat{q}^{4/5})^2 = 1. \end{equation}
\begin{equation} \hat{S}^{\prime 2} + (\hat{q}^{4/5})^2 = 1. \end{equation}
In the  $(\hat {S}^{\prime },\hat {q}^{4/5})$ plane, the orbits trace a unit circle centred at the origin. In the
$(\hat {S}^{\prime },\hat {q}^{4/5})$ plane, the orbits trace a unit circle centred at the origin. In the  $(S^*,q^*)$ plane, as illustrated in figure 3(a), the orbits become slightly distorted. Different failure slopes
$(S^*,q^*)$ plane, as illustrated in figure 3(a), the orbits become slightly distorted. Different failure slopes  $S^*_f$ yield geometrically similar orbits (scaled copies of each other) with similarity centre
$S^*_f$ yield geometrically similar orbits (scaled copies of each other) with similarity centre  $(S^*_e,0)=(1,0)$. Starting from rest, no self-accelerating erosion can occur if
$(S^*_e,0)=(1,0)$. Starting from rest, no self-accelerating erosion can occur if  $S^*_f\leq 1$. Beyond this threshold, the greater the oversteepening at failure, the greater the maximum discharge attained by the resulting avalanche.
$S^*_f\leq 1$. Beyond this threshold, the greater the oversteepening at failure, the greater the maximum discharge attained by the resulting avalanche.

Figure 3. Solution curves for slopes of varying brittleness, during successive evolution stages: (a,b) solutions for the entrainment stage (blue lines) and their continuation beyond their domain of validity (long blue dashes); (c,d) solutions for the bypass stage (green lines) and their continuation beyond their domain of validity (long green dashes); (e,f) solutions for the detrainment stage (magenta lines). Short dashes: domain boundaries.
To obtain the time evolution, the solution (3.6) can be substituted back into (3.3) to get
 \begin{equation} \frac{{\rm d} S^*}{{\rm d} t^*} ={-}2\left(\frac{8}{5}\right)^{3/8}((S^*_f-1)^2-(S^*-1)^2)^{5/8}. \end{equation}
\begin{equation} \frac{{\rm d} S^*}{{\rm d} t^*} ={-}2\left(\frac{8}{5}\right)^{3/8}((S^*_f-1)^2-(S^*-1)^2)^{5/8}. \end{equation}
Defining  $\hat {t} = 2(\frac {8}{5})^{3/8} S^{\prime 1/4}_f t^*$, this ODE can be normalized and separated into
$\hat {t} = 2(\frac {8}{5})^{3/8} S^{\prime 1/4}_f t^*$, this ODE can be normalized and separated into
 \begin{equation} \frac{{\rm d}\hat{S}^{\prime}}{(1-\hat{S}^{\prime 2})^{5/8}} ={-} {\rm d}\hat{t}. \end{equation}
\begin{equation} \frac{{\rm d}\hat{S}^{\prime}}{(1-\hat{S}^{\prime 2})^{5/8}} ={-} {\rm d}\hat{t}. \end{equation}
Integration subject to initial condition  $\hat {S}^{\prime }(0)=1$ then yields the implicit solution
$\hat {S}^{\prime }(0)=1$ then yields the implicit solution
 \begin{equation} G_{5/4}(\hat{S}^{\prime}) - G_{5/4}(1)={-}\hat{t}. \end{equation}
\begin{equation} G_{5/4}(\hat{S}^{\prime}) - G_{5/4}(1)={-}\hat{t}. \end{equation}Here, we have introduced the generalized arcsine function
 \begin{equation} G_\varphi(x) = \int_0^x\frac{{\rm d}\xi}{(1-\xi^2)^{\varphi/2}} = x {}_2F_1\left(\frac{1}{2},\frac{\varphi}{2};\frac{3}{2};x^2\right), \end{equation}
\begin{equation} G_\varphi(x) = \int_0^x\frac{{\rm d}\xi}{(1-\xi^2)^{\varphi/2}} = x {}_2F_1\left(\frac{1}{2},\frac{\varphi}{2};\frac{3}{2};x^2\right), \end{equation}
where  $_2F_1(a,b;c,x)$ is the hypergeometric function. Defined over interval
$_2F_1(a,b;c,x)$ is the hypergeometric function. Defined over interval  $-1\leq x \leq 1$,
$-1\leq x \leq 1$,  $G_\varphi (x)$ is an odd function that resembles an arcsine and in fact reduces to
$G_\varphi (x)$ is an odd function that resembles an arcsine and in fact reduces to  $G_1(x) = \sin ^{-1}(x)$ when
$G_1(x) = \sin ^{-1}(x)$ when  $\varphi = 1$. The normalized time at which
$\varphi = 1$. The normalized time at which  $\hat {S}^{\prime }=0$, erosion ends and the discharge peaks is then given by
$\hat {S}^{\prime }=0$, erosion ends and the discharge peaks is then given by
 \begin{equation} \hat{t}_e = G_{5/4}(1) = \int_0^1\frac{{\rm d}\kern 0.06em x}{(1-x^2)^{5/8}} = \frac{\sqrt{\rm \pi}\varGamma\left(\dfrac{3}{8}\right)}{2\varGamma\left(\dfrac{7}{8}\right)} \approx 1.9279, \end{equation}
\begin{equation} \hat{t}_e = G_{5/4}(1) = \int_0^1\frac{{\rm d}\kern 0.06em x}{(1-x^2)^{5/8}} = \frac{\sqrt{\rm \pi}\varGamma\left(\dfrac{3}{8}\right)}{2\varGamma\left(\dfrac{7}{8}\right)} \approx 1.9279, \end{equation}
where  $\varGamma ({\cdot })$ is the gamma function. In terms of dimensionless variables (2.36), this result can also be written
$\varGamma ({\cdot })$ is the gamma function. In terms of dimensionless variables (2.36), this result can also be written
 \begin{equation} t^*_e = \tfrac{1}{2}\left(\tfrac{5}{8}\right)^{3/8}\hat{t}_e (S^*_f-1)^{{-}1/4} = \tfrac{1}{4}\left(\tfrac{5}{2}\right)^{3/10}\hat{t}_e q^{*-1/5}_e. \end{equation}
\begin{equation} t^*_e = \tfrac{1}{2}\left(\tfrac{5}{8}\right)^{3/8}\hat{t}_e (S^*_f-1)^{{-}1/4} = \tfrac{1}{4}\left(\tfrac{5}{2}\right)^{3/10}\hat{t}_e q^{*-1/5}_e. \end{equation}
Thus the greater the oversteepening at failure, the greater the peak discharge, and the shorter the time needed to attain this peak. This is illustrated in figure 3(b), which shows the dimensionless discharge hydrographs  $q^*(t^*)$ associated with the orbits of figure 3(a). Note that the results of this section are valid only for the entrainment stage, over time interval
$q^*(t^*)$ associated with the orbits of figure 3(a). Note that the results of this section are valid only for the entrainment stage, over time interval  $t^*_f = 0 \leq t^* \leq t^*_e$. The corresponding curve segments are shown as solid lines on figure 3(a,b). To show what the formulas produce beyond this range of validity, however, the corresponding curves are also shown as dashed lines. The correct curves for
$t^*_f = 0 \leq t^* \leq t^*_e$. The corresponding curve segments are shown as solid lines on figure 3(a,b). To show what the formulas produce beyond this range of validity, however, the corresponding curves are also shown as dashed lines. The correct curves for  $t^*>t^*_e$ are derived in the next sections.
$t^*>t^*_e$ are derived in the next sections.
3.2. Bypass stage
At time  $t^* = t^*_e$, the flow layer starts to decelerate. Detrainment cannot yet occur, however, because the basal shear rate
$t^* = t^*_e$, the flow layer starts to decelerate. Detrainment cannot yet occur, however, because the basal shear rate  $\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}^*$ at this time still has the maximal value
$\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}^*$ at this time still has the maximal value
 \begin{equation} \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}}^*_{max} = h^{*1/2}_e. \end{equation}
\begin{equation} \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}}^*_{max} = h^{*1/2}_e. \end{equation}
Starting from this finite value, the basal shear rate must drop back to zero before deposition can occur. Over some time  $t^*_e\leq t^* \leq t^*_d$, the flowing layer will therefore undergo bypass, during which it will retain the constant thickness
$t^*_e\leq t^* \leq t^*_d$, the flowing layer will therefore undergo bypass, during which it will retain the constant thickness  $h^* = h^*_e$ given by (3.7). During the bypass stage, the Bagnold shape (3.2) no longer holds, hence the evolving shape of the velocity profile must be derived anew. The equations to be solved can be written
$h^* = h^*_e$ given by (3.7). During the bypass stage, the Bagnold shape (3.2) no longer holds, hence the evolving shape of the velocity profile must be derived anew. The equations to be solved can be written
 $$\begin{gather} \frac{{\rm d} S^*}{{\rm d} t^*} ={-}8h^*_e \int_0^1 u^* \,{\rm d}\eta, \end{gather}$$
$$\begin{gather} \frac{{\rm d} S^*}{{\rm d} t^*} ={-}8h^*_e \int_0^1 u^* \,{\rm d}\eta, \end{gather}$$ $$\begin{gather}\frac{\partial u^*}{\partial t^*} = S^* + \frac{1}{h^{* 3/2}_e} \frac{\partial}{\partial \eta}\left(\eta^{1/2} \frac{\partial u^*}{\partial \eta}\right), \end{gather}$$
$$\begin{gather}\frac{\partial u^*}{\partial t^*} = S^* + \frac{1}{h^{* 3/2}_e} \frac{\partial}{\partial \eta}\left(\eta^{1/2} \frac{\partial u^*}{\partial \eta}\right), \end{gather}$$
where  $\eta = y/h = y^*/h^*$ is a normalized depth coordinate, and where the evolving velocity profile
$\eta = y/h = y^*/h^*$ is a normalized depth coordinate, and where the evolving velocity profile  $u^*(\eta,t^*)$ must satisfy the homogeneous boundary conditions
$u^*(\eta,t^*)$ must satisfy the homogeneous boundary conditions
 \begin{equation} \frac{\partial u^*}{\partial \eta}(0,t^*) = 0,\quad u^*(1,t^*) = 0. \end{equation}
\begin{equation} \frac{\partial u^*}{\partial \eta}(0,t^*) = 0,\quad u^*(1,t^*) = 0. \end{equation}
Given at time  $t^*=t^*_e$, the initial conditions for the slope and velocity profile are
$t^*=t^*_e$, the initial conditions for the slope and velocity profile are
 \begin{equation} S^*(t^*_e) = 1,\quad u^*(\eta,t^*_e) = \tfrac{2}{3}h^{*3/2}_e(1-\eta^{3/2}), \end{equation}
\begin{equation} S^*(t^*_e) = 1,\quad u^*(\eta,t^*_e) = \tfrac{2}{3}h^{*3/2}_e(1-\eta^{3/2}), \end{equation}
as obtained in the previous section. Whereas for the entrainment stage a nonlinear moving boundary problem had to be solved, here the flow thickness remains constant. The equations therefore become linear and homogeneous: they are linear in the two unknowns  $S^*$ and
$S^*$ and  $u^*$, and admit the solution pair
$u^*$, and admit the solution pair  $u^*=0$,
$u^*=0$,  $S^*=0$. Moreover, their behaviour depends on the single dimensionless number
$S^*=0$. Moreover, their behaviour depends on the single dimensionless number  $h^*_e = (\frac {5}{8})^{1/4} (S^*_f-1)^{1/2}$, which itself depends only on the oversteepening at failure,
$h^*_e = (\frac {5}{8})^{1/4} (S^*_f-1)^{1/2}$, which itself depends only on the oversteepening at failure,  $S^*_f$.
$S^*_f$.
Generalizing an approach applied earlier by Parez et al. (Reference Parez, Aharonov and Toussaint2016) and Capart (Reference Capart2023) to the constant slope case, we seek series solutions for  $S^*(t)$ and
$S^*(t)$ and  $u^*(\eta,t^*)$ of the form
$u^*(\eta,t^*)$ of the form
 $$\begin{gather} S^*(t^*) = \sum_{n=1}^{N}C_n \exp(-\lambda_n (t^*-t^*_e)), \end{gather}$$
$$\begin{gather} S^*(t^*) = \sum_{n=1}^{N}C_n \exp(-\lambda_n (t^*-t^*_e)), \end{gather}$$ $$\begin{gather}u^*(\eta,t^*) = \sum_{n=1}^{N} C_n\, f_n(\eta)\exp(-\lambda_n (t^*-t^*_e)), \end{gather}$$
$$\begin{gather}u^*(\eta,t^*) = \sum_{n=1}^{N} C_n\, f_n(\eta)\exp(-\lambda_n (t^*-t^*_e)), \end{gather}$$
where the roots  $\lambda _n$ and coefficients
$\lambda _n$ and coefficients  $C_n$ can be real or complex, and the infinite series is truncated to a finite number of terms
$C_n$ can be real or complex, and the infinite series is truncated to a finite number of terms  $N=8$ (in practice,
$N=8$ (in practice,  $N=3$ is sufficient for accuracy to at least three significant figures). The eigenfunctions
$N=3$ is sufficient for accuracy to at least three significant figures). The eigenfunctions  $f_n(\eta )$ that satisfy the partial differential equation (3.19) and boundary conditions (3.20a,b) are obtained as
$f_n(\eta )$ that satisfy the partial differential equation (3.19) and boundary conditions (3.20a,b) are obtained as
 \begin{equation} f_n(\eta) = \frac{\eta^{1/4}{\rm J}_{{-}1/3}(\kappa_n \eta^{3/4}) - {\rm J}_{{-}1/3}(\kappa_n)}{\lambda_n {\rm J}_{{-}1/3}(\kappa_n)}, \end{equation}
\begin{equation} f_n(\eta) = \frac{\eta^{1/4}{\rm J}_{{-}1/3}(\kappa_n \eta^{3/4}) - {\rm J}_{{-}1/3}(\kappa_n)}{\lambda_n {\rm J}_{{-}1/3}(\kappa_n)}, \end{equation}
where  $\kappa _n = \tfrac {4}{3}\lambda _n^{1/2}h^{*3/4}_e$, and
$\kappa _n = \tfrac {4}{3}\lambda _n^{1/2}h^{*3/4}_e$, and  ${\rm J}_\nu (z)$ is the Bessel function of the first kind of order
${\rm J}_\nu (z)$ is the Bessel function of the first kind of order  $\nu$. To satisfy (3.18), the roots
$\nu$. To satisfy (3.18), the roots  $\lambda _n$ must satisfy the transcendental equation
$\lambda _n$ must satisfy the transcendental equation
 \begin{equation} K(\lambda) = (\lambda^2 + 8 h^*_e) {\rm J}_{{-}1/3}(\kappa) - 8 h^{*1/4}_e \frac{{\rm J}_{2/3}(\kappa)}{\lambda^{1/2}} = 0, \end{equation}
\begin{equation} K(\lambda) = (\lambda^2 + 8 h^*_e) {\rm J}_{{-}1/3}(\kappa) - 8 h^{*1/4}_e \frac{{\rm J}_{2/3}(\kappa)}{\lambda^{1/2}} = 0, \end{equation}
in which  $\kappa = \frac {4}{3}\lambda ^{1/2}h^{*3/4}_e$. Note that
$\kappa = \frac {4}{3}\lambda ^{1/2}h^{*3/4}_e$. Note that  $K(\lambda )$ is a complex-valued function of a complex variable, hence we must find roots
$K(\lambda )$ is a complex-valued function of a complex variable, hence we must find roots  $\lambda$ in the complex plane that zero both its real and imaginary parts. The condition (3.25) yields infinitely many discrete roots
$\lambda$ in the complex plane that zero both its real and imaginary parts. The condition (3.25) yields infinitely many discrete roots  $\lambda _n$,
$\lambda _n$,  $n = 1,\ldots,\infty$, indexed by taking the real part of
$n = 1,\ldots,\infty$, indexed by taking the real part of  $\lambda _n$ in ascending order. For selected values of the slope brittleness
$\lambda _n$ in ascending order. For selected values of the slope brittleness  $S^*_f$, the first three calculated roots
$S^*_f$, the first three calculated roots  $\lambda _n$,
$\lambda _n$,  $n = 1,\ldots,3$ are listed in table 1. The real parts of all roots are positive, yielding, as expected, solutions that decay over time. All roots starting from
$n = 1,\ldots,3$ are listed in table 1. The real parts of all roots are positive, yielding, as expected, solutions that decay over time. All roots starting from  $n=3$ are real and distinct. For
$n=3$ are real and distinct. For  $n>3$, the values
$n>3$, the values  $\kappa _n$ can be approximated by the zeros of
$\kappa _n$ can be approximated by the zeros of  ${\rm J}_{-1/3}(\kappa )$, the roots obtained earlier for the constant slope case (Capart Reference Capart2023). For the first three roots, however, the variable slope condition (3.25) must be used.
${\rm J}_{-1/3}(\kappa )$, the roots obtained earlier for the constant slope case (Capart Reference Capart2023). For the first three roots, however, the variable slope condition (3.25) must be used.
Table 1. First calculated roots  $\lambda _n$ and coefficients
$\lambda _n$ and coefficients  $C_n$ of the bypass series solution.
$C_n$ of the bypass series solution.

The character of the first two roots depends on the value of  $S_f^*$ relative to the value
$S_f^*$ relative to the value  $S^*_{f,{crit}} \approx 1.4976$ at which critical damping occurs. For
$S^*_{f,{crit}} \approx 1.4976$ at which critical damping occurs. For  $1 < S^*_f < S^*_{f,{crit}}$, the first two roots are real and distinct,
$1 < S^*_f < S^*_{f,{crit}}$, the first two roots are real and distinct,  $0 < \lambda _1 < \lambda _2$. For
$0 < \lambda _1 < \lambda _2$. For  $S^*_f > S^*_{f,{crit}}$, by contrast, the first two roots are complex conjugate,
$S^*_f > S^*_{f,{crit}}$, by contrast, the first two roots are complex conjugate,  $\lambda _{1,2} = \alpha \pm i \beta$. The value
$\lambda _{1,2} = \alpha \pm i \beta$. The value  $S^*_f = S^*_{f,{crit}}$ therefore marks a transition from overdamping to underdamping. For avalanching flows started from
$S^*_f = S^*_{f,{crit}}$ therefore marks a transition from overdamping to underdamping. For avalanching flows started from  $S^*_f < S^*_{f,{crit}}$, the flowing layer decelerates asymptotically to zero. Likewise, the basal shear rate
$S^*_f < S^*_{f,{crit}}$, the flowing layer decelerates asymptotically to zero. Likewise, the basal shear rate  $\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}^*$ decreases asymptotically to zero, without ever reaching zero and triggering detrainment. For avalanching flows started from
$\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}^*$ decreases asymptotically to zero, without ever reaching zero and triggering detrainment. For avalanching flows started from  $S^*_f >S^*_{f,{crit}}$, on the other hand, the flowing layer decelerates more strongly, and reaches zero basal shear rate in finite time. This finite time
$S^*_f >S^*_{f,{crit}}$, on the other hand, the flowing layer decelerates more strongly, and reaches zero basal shear rate in finite time. This finite time  $t^* = t^*_d$ at which detrainment starts is again dependent on
$t^* = t^*_d$ at which detrainment starts is again dependent on  $h^*_e$, or equivalently on
$h^*_e$, or equivalently on  $S^*_f$.
$S^*_f$.
The coefficients  $C_n$, finally, must be chosen to satisfy the initial conditions (3.20a,b). In table 1, we provide calculated values for the first three coefficients, for selected values of
$C_n$, finally, must be chosen to satisfy the initial conditions (3.20a,b). In table 1, we provide calculated values for the first three coefficients, for selected values of  $S^*_f$. As needed to satisfy the initial condition
$S^*_f$. As needed to satisfy the initial condition  $S^*(t^*_e) = 1$, it can be checked that the coefficients
$S^*(t^*_e) = 1$, it can be checked that the coefficients  $C_n$ sum to 1 in each case. Once the coefficients
$C_n$ sum to 1 in each case. Once the coefficients  $C_n$ are known, the time-evolving discharge can be obtained from
$C_n$ are known, the time-evolving discharge can be obtained from
 \begin{equation} q^*(t^*) = h^*_e\int_0^1 u^*(\eta)\,{\rm d}\eta = \sum_{n=1}^{N} \frac{\lambda_n C_n}{8} \exp(-\lambda_n (t^*-t^*_e)). \end{equation}
\begin{equation} q^*(t^*) = h^*_e\int_0^1 u^*(\eta)\,{\rm d}\eta = \sum_{n=1}^{N} \frac{\lambda_n C_n}{8} \exp(-\lambda_n (t^*-t^*_e)). \end{equation}Likewise the time-evolving basal shear rate can be calculated from
 \begin{equation} \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}}^*(t^*) = \sum_{n=1}^{N} C_n^{\prime} \exp(-\lambda_n (t^*-t^*_e)), \end{equation}
\begin{equation} \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}}^*(t^*) = \sum_{n=1}^{N} C_n^{\prime} \exp(-\lambda_n (t^*-t^*_e)), \end{equation}where
 \begin{equation} C_n^{\prime} ={-}\frac{C_n}{h^*_e}\frac{{\rm d} f_n}{{\rm d}\eta}(1) =\left( \frac{{\rm J}_{2/3}(\kappa_n)-{\rm J}_{{-}4/3}(\kappa_n)}{2\lambda_n^{1/2}h^{*1/4}_e {\rm J}_{{-}1/3}(\kappa_n)} - \frac{1}{4\lambda_nh^*_e} \right)C_n. \end{equation}
\begin{equation} C_n^{\prime} ={-}\frac{C_n}{h^*_e}\frac{{\rm d} f_n}{{\rm d}\eta}(1) =\left( \frac{{\rm J}_{2/3}(\kappa_n)-{\rm J}_{{-}4/3}(\kappa_n)}{2\lambda_n^{1/2}h^{*1/4}_e {\rm J}_{{-}1/3}(\kappa_n)} - \frac{1}{4\lambda_nh^*_e} \right)C_n. \end{equation}
If  $S_f^*>S_{f,{crit}}$, this basal shear rate drops to zero at the finite time
$S_f^*>S_{f,{crit}}$, this basal shear rate drops to zero at the finite time  $t^*_d$. To find this time, we approximate the series (3.27) at
$t^*_d$. To find this time, we approximate the series (3.27) at  $t^*_d$ by its first two terms, with complex conjugate coefficients
$t^*_d$ by its first two terms, with complex conjugate coefficients  $C^{\prime }_{1,2} = A\pm i B$, such that
$C^{\prime }_{1,2} = A\pm i B$, such that
 \begin{equation} \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}}^*(t^*_d) \approx (2A \cos(\beta(t^*_d-t^*_e)) + 2B \sin(\beta(t^*_d-t^*_e))) \exp(-\alpha(t^*_d-t^*_e)). \end{equation}
\begin{equation} \underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}}{\dot{\gamma}}^*(t^*_d) \approx (2A \cos(\beta(t^*_d-t^*_e)) + 2B \sin(\beta(t^*_d-t^*_e))) \exp(-\alpha(t^*_d-t^*_e)). \end{equation}
The time  $t^*_d$ at which
$t^*_d$ at which  $\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}^*(t^*_d)=0$ is therefore obtained as
$\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}^*(t^*_d)=0$ is therefore obtained as
 \begin{equation} t^*_d \approx t^*_e + \frac{1}{\beta}\tan^{{-}1}({-}A/B). \end{equation}
\begin{equation} t^*_d \approx t^*_e + \frac{1}{\beta}\tan^{{-}1}({-}A/B). \end{equation}
By sampling (3.22) and (3.23) at time  $t^*_d$, we can also determine the slope
$t^*_d$, we can also determine the slope  $S^*_d = S^*(t^*_d)<0$ and velocity profile
$S^*_d = S^*(t^*_d)<0$ and velocity profile  $u^*_d(\eta ) = u^*(\eta,t^*_d)$ attained when detrainment starts.
$u^*_d(\eta ) = u^*(\eta,t^*_d)$ attained when detrainment starts.
For the values of  $S^*_f$ listed in table 1, the resulting orbits
$S^*_f$ listed in table 1, the resulting orbits  $(S^*(t^*),q^*(t^*))$ are plotted in figure 3(c) (green curves). For
$(S^*(t^*),q^*(t^*))$ are plotted in figure 3(c) (green curves). For  $S^*_f=1.4$, the solution is overdamped, and reaches the origin
$S^*_f=1.4$, the solution is overdamped, and reaches the origin  $(0,0)$ without ever leaving the upper half-plane. The other orbits are underdamped, and would eventually spiral inwards to the origin if the basal shear rate did not first drop to zero. The locus
$(0,0)$ without ever leaving the upper half-plane. The other orbits are underdamped, and would eventually spiral inwards to the origin if the basal shear rate did not first drop to zero. The locus  $\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}^*=0$ across which this occurs (short green dashes) is located in the upper left quadrant of the
$\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}^*=0$ across which this occurs (short green dashes) is located in the upper left quadrant of the  $(S^*,q^*)$ plane. The flow therefore reaches zero basal shear rate before the discharge
$(S^*,q^*)$ plane. The flow therefore reaches zero basal shear rate before the discharge  $q^*$ becomes negative. The corresponding discharge hydrographs
$q^*$ becomes negative. The corresponding discharge hydrographs  $q^*(t^*)$ are plotted in figure 3(d). Valid solutions for the bypass stage (continuous green lines) are restricted to the time interval
$q^*(t^*)$ are plotted in figure 3(d). Valid solutions for the bypass stage (continuous green lines) are restricted to the time interval  $t^*_e \leq t^* \leq t^*_d$, during which the basal shear rate remains positive. The underdamped curves are also plotted beyond this range (dashed green lines), but only to show their oscillatory behaviour. The correct curves for
$t^*_e \leq t^* \leq t^*_d$, during which the basal shear rate remains positive. The underdamped curves are also plotted beyond this range (dashed green lines), but only to show their oscillatory behaviour. The correct curves for  $t^*>t^*_d$ are derived in the next section.
$t^*>t^*_d$ are derived in the next section.
3.3. Detrainment stage
During the detrainment stage, the flow simultaneously thins and decelerates. We are thus back to a moving boundary problem, this time with a given initial velocity profile at dimensionless time  $t^* = t^*_d$. For this stage an exact analytical solution is out of reach, but an approximate semi-analytical solution can be obtained. For this purpose, we let both the flow layer thickness
$t^* = t^*_d$. For this stage an exact analytical solution is out of reach, but an approximate semi-analytical solution can be obtained. For this purpose, we let both the flow layer thickness  $h^*$ and mean velocity
$h^*$ and mean velocity  $\bar {u}^{*} = q^*/h^*$ evolve over time, but assume that the velocity profile maintains the self-similar shape
$\bar {u}^{*} = q^*/h^*$ evolve over time, but assume that the velocity profile maintains the self-similar shape
 \begin{equation} \frac{u^*(\eta,t^*)}{\bar{u}^{*}(t^*)} = \frac{u^*(\eta,t^*_d)}{\bar{u}^{*}(t^*_d)}, \end{equation}
\begin{equation} \frac{u^*(\eta,t^*)}{\bar{u}^{*}(t^*)} = \frac{u^*(\eta,t^*_d)}{\bar{u}^{*}(t^*_d)}, \end{equation}
inherited from the bypass solution at time  $t^* = t^*_d$. Self-similarity does not hold exactly, but is supported by numerical solutions of stopping transients (Capart et al. Reference Capart, Hung and Stark2015; Barker & Gray Reference Barker and Gray2017). Subject to this assumption, only three variables
$t^* = t^*_d$. Self-similarity does not hold exactly, but is supported by numerical solutions of stopping transients (Capart et al. Reference Capart, Hung and Stark2015; Barker & Gray Reference Barker and Gray2017). Subject to this assumption, only three variables  $S^*(t^*)$,
$S^*(t^*)$,  $h^*(t^*)$ and
$h^*(t^*)$ and  $\bar {u}^*(t^*)$ suffice to describe the system. Like before, the slope must satisfy
$\bar {u}^*(t^*)$ suffice to describe the system. Like before, the slope must satisfy
 \begin{equation} \frac{{\rm d} S^*}{{\rm d} t^*} ={-}8 h^* \bar{u}^{*}. \end{equation}
\begin{equation} \frac{{\rm d} S^*}{{\rm d} t^*} ={-}8 h^* \bar{u}^{*}. \end{equation}
Subject to the basal boundary condition  $\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}^* = 0$, appropriate for detrainment, we integrate (2.34) over the flow depth to obtain the momentum balance equation
$\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}^* = 0$, appropriate for detrainment, we integrate (2.34) over the flow depth to obtain the momentum balance equation
 \begin{equation} \frac{{\rm d}}{{\rm d} t^*}(h^*\bar{u}^{*}) = h^* S^*. \end{equation}
\begin{equation} \frac{{\rm d}}{{\rm d} t^*}(h^*\bar{u}^{*}) = h^* S^*. \end{equation}
Finally, we follow Capart et al. (Reference Capart, Hung and Stark2015) and integrate over depth  $u^*$ times (2.34) to obtain a balance equation for the kinetic energy of the flow layer
$u^*$ times (2.34) to obtain a balance equation for the kinetic energy of the flow layer
 \begin{equation} \frac{{\rm d}}{{\rm d} t^*}\left(\frac{1}{2}\varphi h^*\bar{u}^{*2}\right) = h^*\bar{u}^{*}S^* - \psi\frac{\bar{u}^{*2}}{h^{*1/2}}, \end{equation}
\begin{equation} \frac{{\rm d}}{{\rm d} t^*}\left(\frac{1}{2}\varphi h^*\bar{u}^{*2}\right) = h^*\bar{u}^{*}S^* - \psi\frac{\bar{u}^{*2}}{h^{*1/2}}, \end{equation}
where  $\varphi$ (Boussinesq coefficient) and
$\varphi$ (Boussinesq coefficient) and  $\psi$ are the two shape factors defined by
$\psi$ are the two shape factors defined by
 \begin{equation} \varphi = \frac{1}{h \bar{u}^{2}}\int_0^h u^2 \,{{\rm d}y},\quad \psi = \frac{h^{1/2}}{\bar{u}^{2}} \int_0^h y^{1/2}\dot{\gamma}^2 \,{{\rm d}y}. \end{equation}
\begin{equation} \varphi = \frac{1}{h \bar{u}^{2}}\int_0^h u^2 \,{{\rm d}y},\quad \psi = \frac{h^{1/2}}{\bar{u}^{2}} \int_0^h y^{1/2}\dot{\gamma}^2 \,{{\rm d}y}. \end{equation}
Under the similarity assumption (3.31), both  $\varphi$ and
$\varphi$ and  $\psi$ remain constant during detrainment. Using the product rule and taking quasilinear combinations of (3.33) and (3.34), we deduce the following evolution equations for the flow depth and mean velocity:
$\psi$ remain constant during detrainment. Using the product rule and taking quasilinear combinations of (3.33) and (3.34), we deduce the following evolution equations for the flow depth and mean velocity:
 $$\begin{gather} \frac{1}{2}\varphi\bar{u}^{*}\frac{{\rm d} h^*}{{\rm d} t^*}= (\varphi-1)h^*S^* +\psi \frac{\bar{u}^{*}}{h^{*1/2}}, \end{gather}$$
$$\begin{gather} \frac{1}{2}\varphi\bar{u}^{*}\frac{{\rm d} h^*}{{\rm d} t^*}= (\varphi-1)h^*S^* +\psi \frac{\bar{u}^{*}}{h^{*1/2}}, \end{gather}$$ $$\begin{gather}\frac{1}{2}\varphi h\frac{{\rm d}\bar{u}^{*}}{{\rm d} t^*}=(1-\tfrac{\varphi}{2})h^*S^* - \psi \frac{\bar{u}^{*}}{h^{*1/2}}. \end{gather}$$
$$\begin{gather}\frac{1}{2}\varphi h\frac{{\rm d}\bar{u}^{*}}{{\rm d} t^*}=(1-\tfrac{\varphi}{2})h^*S^* - \psi \frac{\bar{u}^{*}}{h^{*1/2}}. \end{gather}$$
Together, the three equations (3.32), (3.36) and (3.37) form a closed system of three coupled nonlinear ODEs for  $S^*(t^*)$,
$S^*(t^*)$,  $h^*(t^*)$ and
$h^*(t^*)$ and  $\bar {u}^*(t^*)$. Unless
$\bar {u}^*(t^*)$. Unless  $\psi = 0$ is assumed, no closed form solution could be found. The equations can, however, be integrated numerically, starting from the known initial conditions
$\psi = 0$ is assumed, no closed form solution could be found. The equations can, however, be integrated numerically, starting from the known initial conditions
 \begin{equation} S^*(t^*_d) = S^*_d,\quad h^*(t^*_d) = h^*_e,\quad \bar{u}^{*}(t^*_d) = \bar{u}^{*}_d, \end{equation}
\begin{equation} S^*(t^*_d) = S^*_d,\quad h^*(t^*_d) = h^*_e,\quad \bar{u}^{*}(t^*_d) = \bar{u}^{*}_d, \end{equation}
applied at the time  $t^*_d$ when bypass ends and detrainment starts. Flow stops when
$t^*_d$ when bypass ends and detrainment starts. Flow stops when  $\bar {u}^{*}$ and
$\bar {u}^{*}$ and  $h^*$ drop to zero, at which point the arrest time
$h^*$ drop to zero, at which point the arrest time  $t^*_a$ has been reached, and the slope has attained the inclination
$t^*_a$ has been reached, and the slope has attained the inclination  $S^*_a < 0$. Contrary to early ideas about rotating drum avalanches (Carrigy Reference Carrigy1970), the arrest angle
$S^*_a < 0$. Contrary to early ideas about rotating drum avalanches (Carrigy Reference Carrigy1970), the arrest angle  $S^*_a$ is therefore not a property of the granular material, but a consequence of the avalanching process that can be predicted from the model. For selected values of
$S^*_a$ is therefore not a property of the granular material, but a consequence of the avalanching process that can be predicted from the model. For selected values of  $S^*_f$, table 2 lists the calculated values of these and other flow properties.
$S^*_f$, table 2 lists the calculated values of these and other flow properties.
Table 2. Calculated solution properties for selected values of  $S^*_f$.
$S^*_f$.

As plotted in figure 3(e,f) (magenta lines) the detrainment solutions provide the last missing segments of the orbits and discharge hydrographs. The complete orbits (figure 3e) adopt teardrop shapes when  $S^*_f< S^*_{f,{crit}}$. They become ovoidal when
$S^*_f< S^*_{f,{crit}}$. They become ovoidal when  $S^*_f>S^*_{f,{crit}}$ and get gradually more symmetrical as the slope brittleness
$S^*_f>S^*_{f,{crit}}$ and get gradually more symmetrical as the slope brittleness  $S^*_f$ increases. The discharge hydrographs, likewise, become more symmetrical about their peaks as
$S^*_f$ increases. The discharge hydrographs, likewise, become more symmetrical about their peaks as  $S^*_f$ increases (figure 3f). When
$S^*_f$ increases (figure 3f). When  $S^*_f>S^*_{f,{crit}}$, the discharge decreases to zero in finite time, and this time to arrest
$S^*_f>S^*_{f,{crit}}$, the discharge decreases to zero in finite time, and this time to arrest  $t^*_a$ occurs sooner as
$t^*_a$ occurs sooner as  $S^*_f$ increases. The behaviour of the resulting solutions is described further in the next section.
$S^*_f$ increases. The behaviour of the resulting solutions is described further in the next section.
4. Solution behaviour
To further illustrate solution behaviour, time-evolving velocity profiles are shown in figure 4. Here, plots are normalized by the maximum flow thickness  $h^*_e$ and maximum surface velocity
$h^*_e$ and maximum surface velocity  $u^*_e = \frac {2}{3}(\frac {5}{8})^{3/8}(S^*_f-1)^{3/4}$ experienced during the avalanche. During the entrainment phase (figure 4a), the flow simultaneously accelerates and thickens, while preserving a self-similar shape given by the Bagnold profile of (3.2). The same normalized evolution, moreover, occurs regardless of the value of the slope brittleness
$u^*_e = \frac {2}{3}(\frac {5}{8})^{3/8}(S^*_f-1)^{3/4}$ experienced during the avalanche. During the entrainment phase (figure 4a), the flow simultaneously accelerates and thickens, while preserving a self-similar shape given by the Bagnold profile of (3.2). The same normalized evolution, moreover, occurs regardless of the value of the slope brittleness  $S^*_f$. After the transition from entrainment to bypass, by contrast, the behaviour of the velocity profile becomes strongly affected by the slope brittleness. When
$S^*_f$. After the transition from entrainment to bypass, by contrast, the behaviour of the velocity profile becomes strongly affected by the slope brittleness. When  $S^*_f< S^*_{f,{crit}}$ (overdamped case, figure 4b), the flow thickness remains constant indefinitely, and the flow layer arrests by decelerating gradually throughout its thickness. Asymptotically, the velocity profile reduces to the first term of the series (3.23), and decreases to zero over time as a negative exponential. During this deceleration, the basal shear rate always remains positive and no detrainment occurs.
$S^*_f< S^*_{f,{crit}}$ (overdamped case, figure 4b), the flow thickness remains constant indefinitely, and the flow layer arrests by decelerating gradually throughout its thickness. Asymptotically, the velocity profile reduces to the first term of the series (3.23), and decreases to zero over time as a negative exponential. During this deceleration, the basal shear rate always remains positive and no detrainment occurs.

Figure 4. Normalized solutions for the time-evolving velocity profile at the centreline: (a) entrainment stage; (b) bypass stage for overdamped avalanche ( $S^*_f=1.4$); (c) bypass (green) and detrainment (magenta) stages for underdamped avalanche (
$S^*_f=1.4$); (c) bypass (green) and detrainment (magenta) stages for underdamped avalanche ( $S^*_f=3$); (d) close up of detrainment stage for underdamped avalanche (
$S^*_f=3$); (d) close up of detrainment stage for underdamped avalanche ( $S^*_f=3$). Arrows show direction of change: acceleration vs deceleration at the top; entrainment vs detrainment to the side. There is no detrainment stage for the overdamped case.
$S^*_f=3$). Arrows show direction of change: acceleration vs deceleration at the top; entrainment vs detrainment to the side. There is no detrainment stage for the overdamped case.
When  $S^*_f>S^*_{f,{crit}}$ (underdamped case, figure 4c), deceleration during the bypass stage (green lines) causes the velocity profile to gradually deform into a sigmoidal shape. As a result, the basal shear rate decreases to zero in finite time. At this point, detrainment occurs, and the ensuing velocity profiles simultaneously thin and decelerate (magenta lines, see also the close up of figure 4d). As the profiles shrink to zero, flow arrest occurs abruptly, also in finite time. During the deceleration phase, resistance to erosion no longer influences the evolution of the flow, and the resulting profiles agree qualitatively with numerical and analytical solutions obtained earlier for stopping flows (Barker & Gray Reference Barker and Gray2017; Capart Reference Capart2023).
$S^*_f>S^*_{f,{crit}}$ (underdamped case, figure 4c), deceleration during the bypass stage (green lines) causes the velocity profile to gradually deform into a sigmoidal shape. As a result, the basal shear rate decreases to zero in finite time. At this point, detrainment occurs, and the ensuing velocity profiles simultaneously thin and decelerate (magenta lines, see also the close up of figure 4d). As the profiles shrink to zero, flow arrest occurs abruptly, also in finite time. During the deceleration phase, resistance to erosion no longer influences the evolution of the flow, and the resulting profiles agree qualitatively with numerical and analytical solutions obtained earlier for stopping flows (Barker & Gray Reference Barker and Gray2017; Capart Reference Capart2023).
Throughout the avalanching process, the evolving velocity profile remains continuous in both space and time. The rate of change of the velocity also remains continuous, except at the base of the flow layer upon passage of the erosion front, and at the surface upon failure and sudden arrest. To within approximation error, these continuity properties also hold across the transitions from entrainment to bypass, and from bypass to detrainment. The adopted governing equations and basal boundary conditions therefore let the flow transition freely and smoothly between entrainment, bypass and detrainment.
The time evolution of some additional solution properties is illustrated in figure 5. Figures 5(a) and 5(b) show how the flow thickness  $h^*(t^*)$ and
$h^*(t^*)$ and  $\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}^*(t^*)$ jointly evolve subject to the complementary inequalities (2.10a–c) and (2.10a–c). During the entrainment stage (blue lines), both increase in algebraic lockstep, as the two quantities vary together while satisfying the quadratic relation
$\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}^*(t^*)$ jointly evolve subject to the complementary inequalities (2.10a–c) and (2.10a–c). During the entrainment stage (blue lines), both increase in algebraic lockstep, as the two quantities vary together while satisfying the quadratic relation  $h^*=\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}_{max}^{*2}$ implied by (3.1). During the bypass stage (green lines), by contrast, the flow thickness remains constant while the basal shear rate decreases. For the overdamped case (
$h^*=\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}_{max}^{*2}$ implied by (3.1). During the bypass stage (green lines), by contrast, the flow thickness remains constant while the basal shear rate decreases. For the overdamped case ( $S^*_f=1.4$), the basal shear rate decreases asymptotically to zero, and detrainment does not occur. For the underdamped case, the basal shear rate reaches zero in finite time, after which detrainment occurs (magenta lines) until the flow thickness has decreased to zero and flow arrest occurs.
$S^*_f=1.4$), the basal shear rate decreases asymptotically to zero, and detrainment does not occur. For the underdamped case, the basal shear rate reaches zero in finite time, after which detrainment occurs (magenta lines) until the flow thickness has decreased to zero and flow arrest occurs.

Figure 5. Time-evolving variables for overdamped ( $S^*_f=1.4$, long dashes) and underdamped avalanches (
$S^*_f=1.4$, long dashes) and underdamped avalanches ( $S^*_f=3$, continuous lines): (a) flowing layer thickness; (b) basal shear rate; (c) surface velocity; (d) surface inclination. Blue: entrainment stage (short blue dashes: response for infinitely long channel); green: bypass stage; magenta: detrainment stage. There is no detrainment stage for the overdamped case.
$S^*_f=3$, continuous lines): (a) flowing layer thickness; (b) basal shear rate; (c) surface velocity; (d) surface inclination. Blue: entrainment stage (short blue dashes: response for infinitely long channel); green: bypass stage; magenta: detrainment stage. There is no detrainment stage for the overdamped case.
Figure 5(c) shows the corresponding evolution of the surface velocity  ${\tilde {u}}^{*}(t^*)$. Surface grains accelerate during the entrainment stage (blue lines), then decelerate during the bypass (green lines) and detrainment stages (magenta line). Whereas for the overdamped case, the surface velocity decreases asymptotically to zero, for the underdamped case the deceleration to zero occurs abruptly. Like the discharge, the surface velocity peaks at time
${\tilde {u}}^{*}(t^*)$. Surface grains accelerate during the entrainment stage (blue lines), then decelerate during the bypass (green lines) and detrainment stages (magenta line). Whereas for the overdamped case, the surface velocity decreases asymptotically to zero, for the underdamped case the deceleration to zero occurs abruptly. Like the discharge, the surface velocity peaks at time  $t^*_e$. The erosion resistance angle
$t^*_e$. The erosion resistance angle  $\theta _e$ is therefore the angle at which both the discharge and surface velocity reach their maximum. This makes it straightforward to estimate from experiments or discrete element simulations. The angle of peak velocity was earlier identified by Marteau & Andrade (Reference Marteau and Andrade2018) as an important characteristic of granular avalanches.
$\theta _e$ is therefore the angle at which both the discharge and surface velocity reach their maximum. This makes it straightforward to estimate from experiments or discrete element simulations. The angle of peak velocity was earlier identified by Marteau & Andrade (Reference Marteau and Andrade2018) as an important characteristic of granular avalanches.
Finally figure 5(d) shows the time evolution of the surface inclination during the sudden relaxation process. Immediately after failure, the inclination  $S^*$ changes slowly at first. The variables thus behave as if the channel inclination remained frozen. Accordingly, the early time evolutions of the other variables match the power laws
$S^*$ changes slowly at first. The variables thus behave as if the channel inclination remained frozen. Accordingly, the early time evolutions of the other variables match the power laws  $h^* \propto t^{*2/3}$,
$h^* \propto t^{*2/3}$,  $\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}^* \propto t^{*1/3}$ and
$\underset{\raise0.3em\hbox{$\smash{\scriptscriptstyle\thicksim}$}} {\dot {\gamma }}^* \propto t^{*1/3}$ and  ${\tilde {u}}^* \propto t^{*}$ derived in Capart (Reference Capart2023) for entraining flows in channels of constant inclination (dashed blue lines in figure 5a–c). For slopes of finite length, however, the surface inclination eventually starts to drop. When the curves reach the inclination
${\tilde {u}}^* \propto t^{*}$ derived in Capart (Reference Capart2023) for entraining flows in channels of constant inclination (dashed blue lines in figure 5a–c). For slopes of finite length, however, the surface inclination eventually starts to drop. When the curves reach the inclination  $S^*_e=1$, they exhibit an inflection point and the flow switches from entrainment (blue lines) to bypass (green lines). In the overdamped case, the inclination then decreases asymptotically to the critical slope
$S^*_e=1$, they exhibit an inflection point and the flow switches from entrainment (blue lines) to bypass (green lines). In the overdamped case, the inclination then decreases asymptotically to the critical slope  $S^*_c=0$, and it takes infinite time for the flow to stop completely. Such exponentially decaying angle histories were observed by Perrin et al. (Reference Perrin, Clavaud, Wyart, Metzger and Forterre2019) in drum experiments involving frictionless immersed grains. In the underdamped case, by contrast, the surface inclination undershoots the critical inclination, reaching an arrest inclination
$S^*_c=0$, and it takes infinite time for the flow to stop completely. Such exponentially decaying angle histories were observed by Perrin et al. (Reference Perrin, Clavaud, Wyart, Metzger and Forterre2019) in drum experiments involving frictionless immersed grains. In the underdamped case, by contrast, the surface inclination undershoots the critical inclination, reaching an arrest inclination  $S^*_a$ (magenta dashes) that is milder than the critical inclination
$S^*_a$ (magenta dashes) that is milder than the critical inclination  $S^*_c = 0$ (black dashes), and stops evolving in finite time. Such stopping in finite time was likewise observed by Perrin et al. (Reference Perrin, Clavaud, Wyart, Metzger and Forterre2019) in drum experiments, when performed with frictional grains. Unlike the transition from entrainment to bypass (blue to green), the transition from bypass to detrainment (green to magenta) does not coincide with any peak or inflection point of the surface velocity or inclination history (figure 5c,d). Its occurrence hinges instead on what occurs at the base of the flow layer (figure 5a,b), more difficult to observe.
$S^*_c = 0$ (black dashes), and stops evolving in finite time. Such stopping in finite time was likewise observed by Perrin et al. (Reference Perrin, Clavaud, Wyart, Metzger and Forterre2019) in drum experiments, when performed with frictional grains. Unlike the transition from entrainment to bypass (blue to green), the transition from bypass to detrainment (green to magenta) does not coincide with any peak or inflection point of the surface velocity or inclination history (figure 5c,d). Its occurrence hinges instead on what occurs at the base of the flow layer (figure 5a,b), more difficult to observe.
As illustrated by figure 6, the characteristic times of the avalanching process vary with the slope brittleness  $S^*_f$. At time
$S^*_f$. At time  $t^*_e$ (blue curve), avalanches reach their peak discharge, and transition from entrainment to bypass. This time is undefined for
$t^*_e$ (blue curve), avalanches reach their peak discharge, and transition from entrainment to bypass. This time is undefined for  $S^*_f < 1$, as in that case resistance to erosion at the base prevents avalanches from growing and accelerating. For
$S^*_f < 1$, as in that case resistance to erosion at the base prevents avalanches from growing and accelerating. For  $S^*_f > 1$,
$S^*_f > 1$,  $t^*_e$ becomes shorter as the slope becomes more brittle, and diverges to infinity as
$t^*_e$ becomes shorter as the slope becomes more brittle, and diverges to infinity as  $S^*_f \downarrow 1$. This limit is associated with avalanches that grow and decay infinitely slowly. At time
$S^*_f \downarrow 1$. This limit is associated with avalanches that grow and decay infinitely slowly. At time  $t^*_d$ (green curve), avalanches transition from bypass to detrainment, and at time
$t^*_d$ (green curve), avalanches transition from bypass to detrainment, and at time  $t^*_a$ they come to complete arrest (magenta curve). When
$t^*_a$ they come to complete arrest (magenta curve). When  $S^*_f \leq S^*_{f,{crit}}$, neither event occurs in finite time. For
$S^*_f \leq S^*_{f,{crit}}$, neither event occurs in finite time. For  $S^*_f > S^*_{f,{crit}}$, by contrast, both
$S^*_f > S^*_{f,{crit}}$, by contrast, both  $t^*_d$ and
$t^*_d$ and  $t^*_a$ are finite, and occur sooner as the slope becomes more brittle. Both times also diverge to infinity as
$t^*_a$ are finite, and occur sooner as the slope becomes more brittle. Both times also diverge to infinity as  $S^*_f \downarrow S^*_{f,{crit}}$. When
$S^*_f \downarrow S^*_{f,{crit}}$. When  $1 < S^*_f \leq S^*_{f,{crit}}$, avalanches reach their peak discharge in finite time, but arrest infinitely slowly. Such contrasted approaches to flow arrest were observed earlier by Perrin et al. (Reference Perrin, Clavaud, Wyart, Metzger and Forterre2019), in drum avalanche experiments performed with frictionless and frictional immersed grains.
$1 < S^*_f \leq S^*_{f,{crit}}$, avalanches reach their peak discharge in finite time, but arrest infinitely slowly. Such contrasted approaches to flow arrest were observed earlier by Perrin et al. (Reference Perrin, Clavaud, Wyart, Metzger and Forterre2019), in drum avalanche experiments performed with frictionless and frictional immersed grains.

Figure 6. Dimensionless characteristic times as a function of slope brittleness. Solid lines: times at which entrainment ends (blue), detrainment starts (green) and arrest occurs (magenta). The dashed lines are the two vertical asymptotes.
5. Comparison with experiments and discrete element simulations
5.1. Data sources and processing
To test the proposed theory, its predictions will be compared with data from three different sources: laboratory experiments by Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008) and Balmforth & McElwaine (Reference Balmforth and McElwaine2018), and discrete element simulations by Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021). The three test cases chosen, listed in table 3, are those that were described most completely in each reference. All involve frictional spherical particles in partially filled rotating drums, but the grain sizes, drum dimensions and rotation rates differ. Crucially, inclination histories featuring multiple avalanche events were reported for each test case, allowing characteristic angles to be determined. For illustration, we show in figures 7 and 8 how we processed the data from the discrete element simulations of Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021). As explained in the original references, Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008) and Balmforth & McElwaine (Reference Balmforth and McElwaine2018) used similar steps to process their own experimental data.
Table 3. Test conditions and model parameters determined from inclination history data. Experiments by Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008) (case 1) and Balmforth & McElwaine (Reference Balmforth and McElwaine2018) (case 2); discrete particle simulations by Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021) (case 3a).


Figure 7. Processing of surface inclination history recorded in an experiment or discrete element simulation (here, a simulation by Kasper et al. Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021): (a) segmentation of angle history into separate avalanche events; (b) identification of extremal slope relaxation rates from numerically differentiated signal. Symbols: failure (stars), arrest (plus) and extremal values (circles). Dashes: drum rotation rate.

Figure 8. Master curves (a,b) and angle correlations (c,d) deduced from experiments (a,c) and discrete element simulations (b,d). Experiments by Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008) (blue) and Balmforth & McElwaine (Reference Balmforth and McElwaine2018) (magenta); discrete element simulations by Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021). Continuous lines: master curves; short dashes:  $\pm$ one standard deviation; symbols: angle data from individual avalanche events; long dashes: fits through these data.
$\pm$ one standard deviation; symbols: angle data from individual avalanche events; long dashes: fits through these data.
Illustrated in figure 7, the inclination time history  $\theta (t)$ can be obtained by video analysis in experiments (Fischer et al. Reference Fischer, Gondret, Perrin and Rabaud2008; Balmforth & McElwaine Reference Balmforth and McElwaine2018), or by processing particle positions in discrete element simulations (Kasper et al. Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021). From such time series, individual avalanche events can be identified and analysed. For each event, the
$\theta (t)$ can be obtained by video analysis in experiments (Fischer et al. Reference Fischer, Gondret, Perrin and Rabaud2008; Balmforth & McElwaine Reference Balmforth and McElwaine2018), or by processing particle positions in discrete element simulations (Kasper et al. Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021). From such time series, individual avalanche events can be identified and analysed. For each event, the  $(t,\theta )$ coordinates of the maximum and minimum inclinations can first be acquired (figure 7a). These approximate the failure time and angle
$(t,\theta )$ coordinates of the maximum and minimum inclinations can first be acquired (figure 7a). These approximate the failure time and angle  $(t_f,\theta _f)$, and the arrest time and angle
$(t_f,\theta _f)$, and the arrest time and angle  $(t_a,\theta _a)$ associated with the event. Secondly, numerical differentiation can be used to obtain the inclination rate of change,
$(t_a,\theta _a)$ associated with the event. Secondly, numerical differentiation can be used to obtain the inclination rate of change,  ${\rm d}\theta /{\rm d} t$, and estimate from its extreme value the time, angle and angular velocity
${\rm d}\theta /{\rm d} t$, and estimate from its extreme value the time, angle and angular velocity  $(t_e,\theta _e,({\rm d}\theta /{\rm d} t)_e)$ at the end of the entrainment phase (figure 7b).
$(t_e,\theta _e,({\rm d}\theta /{\rm d} t)_e)$ at the end of the entrainment phase (figure 7b).
In both simulations and experiments, avalanching is quasi-periodic (Evesque Reference Evesque1991), featuring a regular sequence of similar but not identical avalanches. Even after the drum has rotated at constant speed for some time, there is considerable variation between successive avalanche events. In particular, a broad distribution is obtained for the avalanche amplitude  ${\rm \Delta} \theta = \theta _f - \theta _a$. By contrast, the avalanche and entrainment durations,
${\rm \Delta} \theta = \theta _f - \theta _a$. By contrast, the avalanche and entrainment durations,  $t_a - t_f$ and
$t_a - t_f$ and  $t_e - t_f$, show less variation. Angle histories
$t_e - t_f$, show less variation. Angle histories  $\theta (t)$ for distinct avalanches, moreover, exhibit similar shapes. They were found by Balmforth & McElwaine (Reference Balmforth and McElwaine2018) to collapse reasonably close together when normalized in the form
$\theta (t)$ for distinct avalanches, moreover, exhibit similar shapes. They were found by Balmforth & McElwaine (Reference Balmforth and McElwaine2018) to collapse reasonably close together when normalized in the form
 \begin{equation} \varPhi(t) = \frac{\theta(t-t_m)-\theta_a}{\theta_f-\theta_a}, \end{equation}
\begin{equation} \varPhi(t) = \frac{\theta(t-t_m)-\theta_a}{\theta_f-\theta_a}, \end{equation}
where  $t_m$ is the time at which the angle crosses the midpoint value
$t_m$ is the time at which the angle crosses the midpoint value  $\theta _m = (\theta _f + \theta _a)/2$. This normalized signal can therefore be averaged over multiple events to obtain the mean signal, or master curve,
$\theta _m = (\theta _f + \theta _a)/2$. This normalized signal can therefore be averaged over multiple events to obtain the mean signal, or master curve,
 \begin{equation} \bar{\theta}(t) = \bar{\theta}_a + \bar{\varPhi}(t)(\bar{\theta}_f - \bar{\theta}_a) , \end{equation}
\begin{equation} \bar{\theta}(t) = \bar{\theta}_a + \bar{\varPhi}(t)(\bar{\theta}_f - \bar{\theta}_a) , \end{equation}
where  $\bar {\theta }_f$ and
$\bar {\theta }_f$ and  $\bar {\theta }_a$ are mean failure and arrest angles, averaged over many avalanches. The resulting master curves are shown in figure 8(a,b), respectively, for the experiments of Balmforth & McElwaine (Reference Balmforth and McElwaine2018) (magenta line) and the discrete element simulations of Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021) (green line). The master curve derived by Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008) from 340 avalanches is also plotted on figure 8(a) (blue line). Note, however, that these authors used a slightly different averaging procedure, in which they also normalized the time scale (for details, see Fischer et al. Reference Fischer, Gondret, Perrin and Rabaud2008).
$\bar {\theta }_a$ are mean failure and arrest angles, averaged over many avalanches. The resulting master curves are shown in figure 8(a,b), respectively, for the experiments of Balmforth & McElwaine (Reference Balmforth and McElwaine2018) (magenta line) and the discrete element simulations of Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021) (green line). The master curve derived by Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008) from 340 avalanches is also plotted on figure 8(a) (blue line). Note, however, that these authors used a slightly different averaging procedure, in which they also normalized the time scale (for details, see Fischer et al. Reference Fischer, Gondret, Perrin and Rabaud2008).
In their experiments (figure 8(c), blue dots), Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008) found a weak, but unambiguous negative correlation between the arrest angle  $\theta _a$ and the failure angle
$\theta _a$ and the failure angle  $\theta _f$. Avalanche events that start from a higher than average failure inclination
$\theta _f$. Avalanche events that start from a higher than average failure inclination  $\theta _f$ tend to stop at a lower than average arrest inclination
$\theta _f$ tend to stop at a lower than average arrest inclination  $\theta _a$. To describe this relationship, Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008) proposed a linear fit of the form
$\theta _a$. To describe this relationship, Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008) proposed a linear fit of the form
 \begin{equation} \theta_a = \theta_n + \varTheta_a (\theta_f - \theta_n), \end{equation}
\begin{equation} \theta_a = \theta_n + \varTheta_a (\theta_f - \theta_n), \end{equation}
where  $\varTheta _a < 0$ is the slope of the best fit line, and
$\varTheta _a < 0$ is the slope of the best fit line, and  $\theta _n$ the neutral angle defined by
$\theta _n$ the neutral angle defined by
 \begin{equation} \theta_n = \bar{\theta}_a - \frac{\varTheta_a}{1-\varTheta_a}(\bar{\theta}_f - \bar{\theta}_a). \end{equation}
\begin{equation} \theta_n = \bar{\theta}_a - \frac{\varTheta_a}{1-\varTheta_a}(\bar{\theta}_f - \bar{\theta}_a). \end{equation}
As illustrated by figure 8(c) (magenta dots), Balmforth & McElwaine (Reference Balmforth and McElwaine2018) found a similar negative correlation between the arrest and failure angles, for episodic avalanches produced at low drum rotation rates. At higher rotation rates, they investigated also the continuous granular flow regime. When extrapolated to zero rotation rate ( $\varOmega = 0$), the inclinations of their continuous flows yield inclination angles
$\varOmega = 0$), the inclinations of their continuous flows yield inclination angles  $\theta _1$ that approximately match the neutral angles obtained from their episodic avalanches. For glass spheres of diameter 3 mm, for instance, they obtained
$\theta _1$ that approximately match the neutral angles obtained from their episodic avalanches. For glass spheres of diameter 3 mm, for instance, they obtained  $\theta _1 = 26.5^\circ$, vs
$\theta _1 = 26.5^\circ$, vs  $\theta _n = 26.4^\circ$ calculated from (5.4). The critical angle
$\theta _n = 26.4^\circ$ calculated from (5.4). The critical angle  $\theta _c$, defined as the friction angle under slow, sustained shear, can therefore be identified with either
$\theta _c$, defined as the friction angle under slow, sustained shear, can therefore be identified with either  $\theta _1$ or
$\theta _1$ or  $\theta _n$. Since
$\theta _n$. Since  $\theta _n$ can be estimated from the data for all three test cases, in this work we will set
$\theta _n$ can be estimated from the data for all three test cases, in this work we will set  $\theta _c = \theta _n$ as calculated from (5.4).
$\theta _c = \theta _n$ as calculated from (5.4).
Whereas hundreds of avalanche events were recorded in the experiments by Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008) and Balmforth & McElwaine (Reference Balmforth and McElwaine2018), the simulated signal reported by Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021) includes only seven avalanches. Nevertheless, the data from these seven events again show a clear negative correlation (figure 8(d), green plus symbols). They also exhibit a clear positive correlation between  $\theta _e$ and
$\theta _e$ and  $\theta _f$ (green circles), well described by the linear fit
$\theta _f$ (green circles), well described by the linear fit
 \begin{equation} \theta_e = \theta_c + \varTheta_e (\theta_f - \theta_c), \end{equation}
\begin{equation} \theta_e = \theta_c + \varTheta_e (\theta_f - \theta_c), \end{equation}
where  $0< \varTheta _e < 1$ is the slope of the best fit line, and
$0< \varTheta _e < 1$ is the slope of the best fit line, and  $\theta _c$ is again calculated using (5.4). Unfortunately, neither Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008) nor Balmforth & McElwaine (Reference Balmforth and McElwaine2018) reported values of
$\theta _c$ is again calculated using (5.4). Unfortunately, neither Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008) nor Balmforth & McElwaine (Reference Balmforth and McElwaine2018) reported values of  $\theta _e$ for individual avalanches. The time
$\theta _e$ for individual avalanches. The time  $t_e-t_f$, mean inclination
$t_e-t_f$, mean inclination  $\bar {\theta }_e$ and angular velocity
$\bar {\theta }_e$ and angular velocity  $(d\bar {\theta }/dt)_e$ at the end of the entrainment phase can nevertheless be deduced from their master curves. We can then estimate the implied correlation from
$(d\bar {\theta }/dt)_e$ at the end of the entrainment phase can nevertheless be deduced from their master curves. We can then estimate the implied correlation from
 \begin{equation} \varTheta_e = \frac{\bar{\theta}_e-\theta_c}{\bar{\theta}_f - \theta_c}. \end{equation}
\begin{equation} \varTheta_e = \frac{\bar{\theta}_e-\theta_c}{\bar{\theta}_f - \theta_c}. \end{equation}The resulting numbers are listed in table 3, together with those calculated from the discrete element simulations.
The above observations provide useful guidance for model parameterization. They imply that neither the failure angle  $\theta _f$ nor the erosion angle
$\theta _f$ nor the erosion angle  $\theta _e$ can be taken as constant, even for avalanches taking place in identical conditions. The critical angle
$\theta _e$ can be taken as constant, even for avalanches taking place in identical conditions. The critical angle  $\theta _c$ and the slope brittleness
$\theta _c$ and the slope brittleness  $S_f^* = 1/\varTheta _e$, by contrast, do appear approximately constant over repeat events. Thus although
$S_f^* = 1/\varTheta _e$, by contrast, do appear approximately constant over repeat events. Thus although  $\theta _f$ and
$\theta _f$ and  $\theta _e$ both vary from one event to another, they do so together according to the approximate relationship (5.5). This suggests that they are set by a common jamming process, undergone by the slope material prior to failure. For avalanches involving the same materials in identical conditions, we will therefore assume a constant value
$\theta _e$ both vary from one event to another, they do so together according to the approximate relationship (5.5). This suggests that they are set by a common jamming process, undergone by the slope material prior to failure. For avalanches involving the same materials in identical conditions, we will therefore assume a constant value  $S^*_f= 1/\varTheta _e$, estimated from the empirical correlation
$S^*_f= 1/\varTheta _e$, estimated from the empirical correlation  $\varTheta _e$. We will also adopt the constant approximate value
$\varTheta _e$. We will also adopt the constant approximate value  $\chi \approx 1$ for the rheological coefficient, except when flow thickness data are available to make a more precise determination.
$\chi \approx 1$ for the rheological coefficient, except when flow thickness data are available to make a more precise determination.
To summarize, table 3 lists the two condition-dependent parameters that must be provided as inputs to the theory. They are: the critical angle,  $\theta _c$, and the erosion correlation,
$\theta _c$, and the erosion correlation,  $\varTheta _e$. From these parameters, the complete evolution of an avalanche event can be predicted from its initial failure inclination
$\varTheta _e$. From these parameters, the complete evolution of an avalanche event can be predicted from its initial failure inclination  $\theta _f$. Table 3 also lists some additional measurements, likewise determined from the slope data, but which are not needed as model inputs. They are: the entrainment phase duration,
$\theta _f$. Table 3 also lists some additional measurements, likewise determined from the slope data, but which are not needed as model inputs. They are: the entrainment phase duration,  $t_e-t_f$, the extremal rate of change of the mean inclination,
$t_e-t_f$, the extremal rate of change of the mean inclination,  $({\rm d}\bar {\theta }/{\rm d} t)_e$, the arrest correlation,
$({\rm d}\bar {\theta }/{\rm d} t)_e$, the arrest correlation,  $\varTheta _a$, and the avalanche duration
$\varTheta _a$, and the avalanche duration  $t_a-t_f$. Among these parameters, the arrest correlation
$t_a-t_f$. Among these parameters, the arrest correlation  $\varTheta _a$ is deduced from linear fits through the arrest inclination data (figure 8c,d). The other parameters are averaged from multiple events, when possible, or obtained from the master curve
$\varTheta _a$ is deduced from linear fits through the arrest inclination data (figure 8c,d). The other parameters are averaged from multiple events, when possible, or obtained from the master curve  $\bar {\theta }(t)$ otherwise.
$\bar {\theta }(t)$ otherwise.
5.2. Comparison and discussion
As illustrated in figure 9, the parameters listed in table 3 allow various predictions of the theory to be tested. For the inclination rate of change, (3.13) governing the slope evolution during entrainment implies the dimensionless relationship
 \begin{equation} \frac{({\rm d}\bar{\theta}/{\rm d} t)_e(t_e-t_f)}{\bar{\theta}_f-\bar{\theta}_c} ={-}\hat{t}_e (S^*_f-1), \end{equation}
\begin{equation} \frac{({\rm d}\bar{\theta}/{\rm d} t)_e(t_e-t_f)}{\bar{\theta}_f-\bar{\theta}_c} ={-}\hat{t}_e (S^*_f-1), \end{equation}
where  $\hat {t}_e$ is the numerical constant given by (3.15). The arrest correlation
$\hat {t}_e$ is the numerical constant given by (3.15). The arrest correlation  $\varTheta _a$, on the other hand, should satisfy the dimensionless relationship
$\varTheta _a$, on the other hand, should satisfy the dimensionless relationship
 \begin{equation} \varTheta_a = \frac{S^*_a(S^*_f)}{S^*_f}, \end{equation}
\begin{equation} \varTheta_a = \frac{S^*_a(S^*_f)}{S^*_f}, \end{equation}
where  $S^*_a(S^*_f)$ is the predicted under-steepening at arrest, calculated from the theory as a function of the over-steepening at failure,
$S^*_a(S^*_f)$ is the predicted under-steepening at arrest, calculated from the theory as a function of the over-steepening at failure,  $S^*_f$. In figure 9(a,b), the two theoretical relations (5.7) and (5.8) are compared with the data for the three test cases. Excellent agreement is observed, indicating that the theory accurately describes these two characteristics of slope relaxation, associated, respectively, with entrainment and arrest.
$S^*_f$. In figure 9(a,b), the two theoretical relations (5.7) and (5.8) are compared with the data for the three test cases. Excellent agreement is observed, indicating that the theory accurately describes these two characteristics of slope relaxation, associated, respectively, with entrainment and arrest.

Figure 9. Comparison of predicted relationships with the data of Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008) (blue), Balmforth & McElwaine (Reference Balmforth and McElwaine2018) (magenta) and Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021) (green), for different variables as a function of slope brittleness: (a) extremal slope relaxation rate; (b) arrest inclination; (c) times at which entrainment ends (dashed line, circles) and arrest occurs (solid line, plus symbols).
For the avalanche and entrainment durations, the theory predicts the results
 \begin{equation} \frac{t_e-t_f}{T} = t^*_e(S^*_f),\quad \frac{t_a-t_f}{T} = t^*_a(S^*_f), \end{equation}
\begin{equation} \frac{t_e-t_f}{T} = t^*_e(S^*_f),\quad \frac{t_a-t_f}{T} = t^*_a(S^*_f), \end{equation}
where  $T=(L\cos \theta _c)^{3/4}/(g_{_{\perp }}^{1/2}(\chi D)^{1/4})$ is the time scale given by (2.30), and where
$T=(L\cos \theta _c)^{3/4}/(g_{_{\perp }}^{1/2}(\chi D)^{1/4})$ is the time scale given by (2.30), and where  $t^*_e$,
$t^*_e$,  $t^*_a$ are the dimensionless times plotted earlier in figure 4. In figure 9(c), these model estimates are compared with the data. Agreement is good with the experimental data of Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008), but quite poor for the other two cases. The predicted evolution is three times faster than that measured by Balmforth & McElwaine (Reference Balmforth and McElwaine2018), and twice faster than that simulated by Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021). To reproduce the observed durations for these cases, we would need to adopt values of the rheological coefficient
$t^*_a$ are the dimensionless times plotted earlier in figure 4. In figure 9(c), these model estimates are compared with the data. Agreement is good with the experimental data of Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008), but quite poor for the other two cases. The predicted evolution is three times faster than that measured by Balmforth & McElwaine (Reference Balmforth and McElwaine2018), and twice faster than that simulated by Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021). To reproduce the observed durations for these cases, we would need to adopt values of the rheological coefficient  $\chi$ much smaller than the expected approximate value
$\chi$ much smaller than the expected approximate value  $\chi \approx 1$.
$\chi \approx 1$.
For the experiments of Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008), the drum rotation rate  $\varOmega$ is only approximately 1 % of the peak slope relaxation rate
$\varOmega$ is only approximately 1 % of the peak slope relaxation rate  $-({\rm d}\bar {\theta }/{\rm d} t)_e$. For the test cases of Balmforth & McElwaine (Reference Balmforth and McElwaine2018) and Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021), by contrast, the corresponding ratios are, respectively, 12 % and 36 % (see table 3). For these two test cases, one may therefore suspect that the discrepancy is due to the relatively faster rotation rates, compromising the approximation
$-({\rm d}\bar {\theta }/{\rm d} t)_e$. For the test cases of Balmforth & McElwaine (Reference Balmforth and McElwaine2018) and Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021), by contrast, the corresponding ratios are, respectively, 12 % and 36 % (see table 3). For these two test cases, one may therefore suspect that the discrepancy is due to the relatively faster rotation rates, compromising the approximation  $\varOmega \ll -{\rm d}\theta /{\rm d} t$ adopted to derive solutions and process the data. Because they reported more complete results for this run, the test case we selected for comparison (test case 2) corresponds to the moderate drum rotation rate
$\varOmega \ll -{\rm d}\theta /{\rm d} t$ adopted to derive solutions and process the data. Because they reported more complete results for this run, the test case we selected for comparison (test case 2) corresponds to the moderate drum rotation rate  $\varOmega = 0.23$ deg. s
$\varOmega = 0.23$ deg. s $^{-1}$. In their figure 14(d), however, Balmforth and McElwaine also reported avalanche duration data obtained in otherwise identical conditions, but for much slower rotation rates, down to
$^{-1}$. In their figure 14(d), however, Balmforth and McElwaine also reported avalanche duration data obtained in otherwise identical conditions, but for much slower rotation rates, down to  $\varOmega = 0.005$ deg. s
$\varOmega = 0.005$ deg. s $^{-1}$. This does not reduce the discrepancy, ruling out the finite rotating rate as the most likely reason.
$^{-1}$. This does not reduce the discrepancy, ruling out the finite rotating rate as the most likely reason.
The following other factors, not taken into account by our model, may account for the discrepancy. First, failure may not occur synchronously along the slope face, but instead nucleate locally and take time to propagate elsewhere (Balmforth & McElwaine Reference Balmforth and McElwaine2018; Han et al. Reference Han, Feng, Zhang, Yang, Zivkovic and Li2021). Secondly, sidewall friction or finite size effects may slow the avalanching process. As reported by Balmforth and McElwaine (see their figure 13), avalanche duration increases when the drum width  $W$ is reduced. Finally, the assumed transition between zero and finite shear rate subject to the rheology (2.4) may fail to capture important aspects of granular system evolution during the cyclic process. Some creep, for instance, may take place before yield occurs (Komatsu et al. Reference Komatsu, Inagaki, Nakagawa and Nasuno2001; Farain & Bonn Reference Farain and Bonn2023).
$W$ is reduced. Finally, the assumed transition between zero and finite shear rate subject to the rheology (2.4) may fail to capture important aspects of granular system evolution during the cyclic process. Some creep, for instance, may take place before yield occurs (Komatsu et al. Reference Komatsu, Inagaki, Nakagawa and Nasuno2001; Farain & Bonn Reference Farain and Bonn2023).
In figure 10(a–c), model results for the time evolution of the avalanches are compared with the master curves. To correct for the time scale discrepancy noted in the previous paragraph, for these comparisons we normalize the time coordinate by the duration of the entrainment phase,  $t_e-t_f$, as was done for figure 9(a). When time is normalized in this way, good agreement is obtained between the predicted solutions and the recorded master curves, both for the inclination
$t_e-t_f$, as was done for figure 9(a). When time is normalized in this way, good agreement is obtained between the predicted solutions and the recorded master curves, both for the inclination  $\theta (t)$ (figure 10a) and for its rate of change
$\theta (t)$ (figure 10a) and for its rate of change  ${\rm d}\theta /{\rm d} t$ (figure 10b), a proxy for flow rate
${\rm d}\theta /{\rm d} t$ (figure 10b), a proxy for flow rate  $q(t)$, as functions of the normalized time. The shapes of the orbits (figure 10c) are also well reproduced. For low slope brittleness (experiments of Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008), in blue), the flow rate curve is less sharply peaked and the orbit is more ovoidal, indicating a greater asymmetry between acceleration and deceleration. For high slope brittleness (experiments of Balmforth & McElwaine (Reference Balmforth and McElwaine2018), in magenta), by contrast, the flow rate curve is more sharply peaked, and the orbit more elliptical, indicating greater symmetry between acceleration and deceleration. The simulations of Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021) (in green) are intermediate between the two experimental cases. Agreement is closest with the experiments of Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008), which also best satisfy the assumptions of the model.
$q(t)$, as functions of the normalized time. The shapes of the orbits (figure 10c) are also well reproduced. For low slope brittleness (experiments of Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008), in blue), the flow rate curve is less sharply peaked and the orbit is more ovoidal, indicating a greater asymmetry between acceleration and deceleration. For high slope brittleness (experiments of Balmforth & McElwaine (Reference Balmforth and McElwaine2018), in magenta), by contrast, the flow rate curve is more sharply peaked, and the orbit more elliptical, indicating greater symmetry between acceleration and deceleration. The simulations of Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021) (in green) are intermediate between the two experimental cases. Agreement is closest with the experiments of Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008), which also best satisfy the assumptions of the model.

Figure 10. Comparison of predicted evolution curves with the data from Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008) (blue, cyan), Balmforth & McElwaine (Reference Balmforth and McElwaine2018) (magenta) and Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021) (green): (a–c) dimensionless solutions (solid lines) compared with master curve data (short dashes); (d–f) dimensional solutions (solid lines) compared with the data (dots) from two individual avalanche events reported by Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008).
To check that the model can reproduce not just the composite master curve, but also individual avalanches, figure 10(d–f) compares solution curves with the two measured avalanche events reported by Fischer et al. (Reference Fischer, Gondret, Perrin and Rabaud2008). For these comparisons, no adjustment or normalization is performed, and all parameters are kept the same as before save for the failure angles  $\theta _f = 25.64$ and
$\theta _f = 25.64$ and  $\theta _f = 24.70$ deg. that were measured for these two events. The resulting solution curves (solid lines) are in fair agreement with the measurements (dots), supporting the ability of the model to describe individual avalanches despite their variability from one event to the next. Closer agreement (not shown), would be achieved by adjusting the critical angle
$\theta _f = 24.70$ deg. that were measured for these two events. The resulting solution curves (solid lines) are in fair agreement with the measurements (dots), supporting the ability of the model to describe individual avalanches despite their variability from one event to the next. Closer agreement (not shown), would be achieved by adjusting the critical angle  $\theta _c$ and slope brittleness value
$\theta _c$ and slope brittleness value  $S^*_f$ for each event, but this would undermine the predictive character of the model. Instead, the fair agreement obtained while keeping these two parameters constant suggests that they represent (approximately) intrinsic properties of the granular slope, unlike the highly variable failure and arrest angles.
$S^*_f$ for each event, but this would undermine the predictive character of the model. Instead, the fair agreement obtained while keeping these two parameters constant suggests that they represent (approximately) intrinsic properties of the granular slope, unlike the highly variable failure and arrest angles.
Finally, the predicted velocity profiles at peak flow rate can be compared with the profiles obtained by Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021) from discrete particle simulations. The simulations were performed with particles of three different diameters, in otherwise identical conditions. This makes it possible to test the scaling (2.29) for the dependence of the flow thickness on particle diameter and slope length. To compare theory and simulations, model parameters were set as follows. Because characteristic angles vary with grain size, and from one event to another, they were determined separately for each case (table 4). The critical angles  $\theta _c$ were obtained from the angle histories reported by Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021), using the fitting procedure of figure 8(d). The failure angles
$\theta _c$ were obtained from the angle histories reported by Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021), using the fitting procedure of figure 8(d). The failure angles  $\theta _f$, on the other hand, were set by matching the peak flow rates
$\theta _f$, on the other hand, were set by matching the peak flow rates  $q_e$ of the theory, as calculated using (3.9), with the simulated flow rates obtained by integrating the reported velocity profiles. The
$q_e$ of the theory, as calculated using (3.9), with the simulated flow rates obtained by integrating the reported velocity profiles. The  $\theta _f$ values deduced in this way (table 4) are somewhat higher than expected from the reported angle histories
$\theta _f$ values deduced in this way (table 4) are somewhat higher than expected from the reported angle histories  $\theta (t)$. Likewise, the integrated values
$\theta (t)$. Likewise, the integrated values  $q_e$ are higher than expected from the
$q_e$ are higher than expected from the  $({\rm d}\theta /{\rm d} t)_e$ values of the simulated inclination histories. For the other model parameters, identical values were adopted for all three cases. For the slope brittleness, the value
$({\rm d}\theta /{\rm d} t)_e$ values of the simulated inclination histories. For the other model parameters, identical values were adopted for all three cases. For the slope brittleness, the value  $S^*_f = 1/\varTheta _e = 2.70$ was retained, as determined earlier from the inclination history data of figure 8(d). For the rheological coefficient, finally, the common value
$S^*_f = 1/\varTheta _e = 2.70$ was retained, as determined earlier from the inclination history data of figure 8(d). For the rheological coefficient, finally, the common value  $\chi = 0.95$ was adopted, adjusted slightly from the reference value
$\chi = 0.95$ was adopted, adjusted slightly from the reference value  $\chi = 1$ used earlier.
$\chi = 1$ used earlier.
Table 4. Test conditions and avalanche event parameters for the velocity profiles obtained by Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021) from discrete particle simulations.

The resulting comparisons are shown in figure 11(a). Good agreement is obtained for the velocity profile shape. Over most of the flowing layer, the simulated velocities match well the predicted Bagnold profile. At the base, however, the simulated profiles decrease to zero more gradually. Instead of the sharp drop in shear rate assumed by the model, the simulations indicate a more gradual decrease. In earlier experiments, Courrech du Pont et al. (Reference Courrech du Pont, Fischer, Gondret, Perrin and Rabaud2005) measured velocity profiles along the sidewall during a single avalanche event, and found an even more diffuse, approximately exponential decrease. For steady flows over erodible heaps, models based on non-local rheology have been successful at describing velocity profiles that decay into the bed, in agreement with experiments (Komatsu et al. Reference Komatsu, Inagaki, Nakagawa and Nasuno2001). The applicability of such models to unsteady and eroding flows, however, remains uncertain (Liu & Henann Reference Liu and Henann2017). In this work, we did not explore this avenue and restricted our attention to the  $\mu (I)$ rheology, known to make the velocity decrease to zero at finite depth (Jop et al. Reference Jop, Forterre and Pouliquen2005).
$\mu (I)$ rheology, known to make the velocity decrease to zero at finite depth (Jop et al. Reference Jop, Forterre and Pouliquen2005).

Figure 11. Comparison of predicted velocity profiles at peak flow rate (lines) with the discrete element simulations (circles) of Kasper et al. (Reference Kasper, Magnanimo, de Jong, Beek and Jarray2021) for three different grain diameters (magenta,  $D = 2.5$ mm; blue,
$D = 2.5$ mm; blue,  $D=4$ mm; green,
$D=4$ mm; green,  $D=6$ mm) in otherwise identical conditions: (a) dimensional comparison; (b) dimensionless comparison.
$D=6$ mm) in otherwise identical conditions: (a) dimensional comparison; (b) dimensionless comparison.
For the velocity magnitude, the agreement obtained is not meaningful, since we matched peak flow rates between theory and simulations. For the thickness of the flowing layer, likewise, we improved agreement by adjusting the value of the rheological coefficient. A common value for this coefficient, however, yields excellent agreement for all three grain sizes. The simulations therefore verify the predicted scaling law (2.29), whereby the characteristic thickness  $H$ of the flowing layer increases in proportion to the geometric mean of the grain diameter
$H$ of the flowing layer increases in proportion to the geometric mean of the grain diameter  $D$ and slope length
$D$ and slope length  $L$. This is further emphasized by the normalized profiles of figure 11(b). When plotted in dimensionless form, the simulated velocity profiles collapse closely together, and onto a common profile that matches well the predicted Bagnold shape.
$L$. This is further emphasized by the normalized profiles of figure 11(b). When plotted in dimensionless form, the simulated velocity profiles collapse closely together, and onto a common profile that matches well the predicted Bagnold shape.
6. Conclusions
In this paper, a simple continuum model of discrete granular avalanches was formulated and solved, then compared with experiments and discrete element simulations. The model assumes a linearized  $\mu (I)$ rheology, and a basal erosion resistance
$\mu (I)$ rheology, and a basal erosion resistance  $\tau _e = \tan \theta _e \sigma$ in excess of the critical stress
$\tau _e = \tan \theta _e \sigma$ in excess of the critical stress  $\tau _c=\tan \theta _c \sigma$ needed to sustain shear deformation. Subject to these assumptions, the model can evolve the surface inclination and mid-slope velocity profile of transient avalanches, starting from rest at the failure inclination
$\tau _c=\tan \theta _c \sigma$ needed to sustain shear deformation. Subject to these assumptions, the model can evolve the surface inclination and mid-slope velocity profile of transient avalanches, starting from rest at the failure inclination  $\theta _f$. The resulting avalanche dynamics is controlled by well-defined thickness, velocity and time scales, together with a single dimensionless number
$\theta _f$. The resulting avalanche dynamics is controlled by well-defined thickness, velocity and time scales, together with a single dimensionless number  $S^*_f = (\tan \theta _f-\tan \theta _c)/(\tan \theta _e-\tan \theta _c)$ that measures the brittleness of the slope. From inclination histories recording multiple discrete avalanches, both the critical angle
$S^*_f = (\tan \theta _f-\tan \theta _c)/(\tan \theta _e-\tan \theta _c)$ that measures the brittleness of the slope. From inclination histories recording multiple discrete avalanches, both the critical angle  $\theta _c$ and the slope brittleness
$\theta _c$ and the slope brittleness  $S^*_f$ can be determined. Avalanche characteristics that can then be predicted include the peak flow rate and surface velocity, occurring when the inclination
$S^*_f$ can be determined. Avalanche characteristics that can then be predicted include the peak flow rate and surface velocity, occurring when the inclination  $\theta _e$ is crossed, and the arrest inclination
$\theta _e$ is crossed, and the arrest inclination  $\theta _a \leq \theta _c$ attained when the flow ends.
$\theta _a \leq \theta _c$ attained when the flow ends.
The resulting solution curves and properties are in partial agreement with rotating drum experiments and discrete element simulations. Agreement is good for the arrest angle, the normalized time evolution of the slope inclination, the shape of the velocity profile at peak flow and the predicted scaling for the flow thickness, proportional to the geometric mean of the grain diameter and slope length. For the avalanche duration, however, agreement is good for one test case, but poor for the other two. To probe the remaining discrepancies, new careful experiments or discrete element simulations performed at slow drum rotation rates over multiple avalanche events would be very valuable. Detailed particle simulations could also help elucidate the grain-scale mechanisms governing slope failure and basal erosion (Atman et al. Reference Atman, Claudin, Combe and Martins2014). Likewise, the effects of finite grain size relative to channel width, slope length and flow thickness remain to be clarified.
Multiple model limitations would also need be addressed. First, the influence of interparticle friction and finite rates of drum rotation should be considered. This is necessary to model their influence on the dynamics of discrete avalanches (Allen Reference Allen1970; Balmforth & McElwaine Reference Balmforth and McElwaine2018), and the transition between discrete and continuous avalanching (Rajchenbach Reference Rajchenbach1990; Linz et al. Reference Linz, Hager and Hänggi1999; Fischer et al. Reference Fischer, Gondret and Rabaud2009; Balmforth & McElwaine Reference Balmforth and McElwaine2018; Perrin et al. Reference Perrin, Clavaud, Wyart, Metzger and Forterre2019). Secondly, partial derivatives in the longitudinal and transverse directions must be included to model spatially varying flows, such as avalanches initiated from irregular terrain topography (Tai & Kuo Reference Tai and Kuo2008). Finally the presence of an interstitial fluid should be considered, to model liquid-immersed (Courrech du Pont et al. Reference Courrech du Pont, Gondret, Perrin and Rabaud2003), fluidized (Jessop et al. Reference Jessop, Hogg, Gilbertson and Schoof2017) or liquid-driven (Gonzalez-Ondina, Liu & Fraccarollo Reference Gonzalez-Ondina, Liu and Fraccarollo2022) granular flows. Such model extensions will likely require suitable numerical methods, to solve either the complete equations (see e.g. Lin & Yang Reference Lin and Yang2020; Sarno et al. Reference Sarno, Wang, Tai, Papa, Villani and Oberlack2022) or the simpler equations obtained by integration over depth (see e.g. Capart et al. Reference Capart, Hung and Stark2015; Edwards et al. Reference Edwards, Russell, Johnson and Gray2019). Solutions obtained by analytical techniques, such as those derived in the present paper, should nevertheless remain useful to guide and verify numerical methods. These various tasks are recommended as avenues for future work.
Acknowledgements
This work benefited from discussions and earlier joint research with C.-Y. Hung, C. Stark and P. Aussillous. Experiments by J.-J. Hung, T.-Y. Chou and Y.-F. Hung provided motivation and useful indications. Valuable feedback was also received at the 2023 Salamina Grain Workshop on ‘Discrete Simulation and Continuum Modeling of Granular Matter’, for which we wish to thank the participants and organizers.
Funding
The research was supported by the Taiwan National Science and Technology Council (NSTC).
Declaration of interests
The authors report no conflict of interest.

































 Open access
Open access