



1. Introduction
The year 2023 marked the 100th anniversary of G.I. Taylor's seminal publication (Taylor Reference Taylor1923) on flow confined between two rotating concentric cylinders (Taylor–Couette flow) and the 70th anniversary of his work (Taylor Reference Taylor1953) on enhanced mixing in shear flows (Taylor dispersion). With these two landmark papers in mind, we develop a magnetohydrodynamic (MHD) reference flow inspired by the Taylor–Couette system that enhances mixing at low Reynolds numbers via Taylor dispersion.
Our MHD modification of the Taylor–Couette cell uses electromagnetic body forces rather than viscous traction to drive motion; the usually rotating sidewalls of the cylindrical annulus are fixed and made electrically conducting. The base is kept electrically insulating, while the lid is removed to allow free-surface flow. An applied axial magnetic field and radial electric current drive azimuthal flow of an electrolyte, for which (i) magnetic induction is small compared with magnetic diffusion (low magnetic Reynolds number,  ${Rm}$), (ii) magnetic drag is small relative to viscous forces (low Hartmann number,
${Rm}$), (ii) magnetic drag is small relative to viscous forces (low Hartmann number,  ${Ha}$), and (iii) inertia is small compared with viscous forces (low Reynolds number,
${Ha}$), and (iii) inertia is small compared with viscous forces (low Reynolds number,  $Re$). Under these conditions, the azimuthal momentum balance is dominated by the Lorentz force and viscous drag due to the channel sidewalls and base. We term the resulting circulatory motion ‘annular magneto-Stokes flow’.
$Re$). Under these conditions, the azimuthal momentum balance is dominated by the Lorentz force and viscous drag due to the channel sidewalls and base. We term the resulting circulatory motion ‘annular magneto-Stokes flow’.
Similar MHD flows through cylindrical-annular ducts with conducting sidewalls and axial magnetic field have been considered since the works of Early & Dow (Reference Early and Dow1950), Anderson et al. (Reference Anderson, Baker, Bratenahl, Furth and Kunkel1959) and Braginsky (Reference Braginsky1959). Early modelling efforts focus on the high-Hartmann-number limit for analytical convenience (Hunt & Stewartson Reference Hunt and Stewartson1965) and relevance to liquid metal flows (Baylis & Hunt Reference Baylis and Hunt1971). Later numerical and laboratory works have surveyed a broader range of Hartmann numbers in closed annular ducts (Poyé et al. Reference Poyé, Agullo, Plihon, Bos, Desangles and Bousselin2020; Vernet et al. Reference Vernet, Pereira, Fauve and Gissinger2021), analysed the stability of Hartmann layers (Moresco & Alboussire Reference Moresco and Alboussire2004) and studied the effects of modified electric boundary conditions (Stelzer et al. Reference Stelzer, Cébron, Miralles, Vantieghem, Noir, Scarfe and Jackson2015a,Reference Stelzer, Miralles, Cébron, Noir, Vantieghem and Jacksonb) in cylindrical-annular MHD flows. Recently, liquid metal experiments (Vernet, Fauve & Gissinger Reference Vernet, Fauve and Gissinger2022) in a similar geometry have accessed a regime of Keplerian turbulence representative of flows in astrophysical disks.
In contrast to the above studies involving large-scale liquid metal systems, applications of MHD to microfluidic mixing devices have generated interest in low-Hartmann-number flows (West et al. Reference West, Gleeson, Alderman, Collins and Berney2003; Khal'zov & Smolyakov Reference Khal'zov and Smolyakov2006) appropriate for electrolytes. Initial efforts to model annular magneto-Stokes flow (Gleeson & West Reference Gleeson and West2002; Gleeson et al. Reference Gleeson, Roche, West and Gelb2004; Digilov Reference Digilov2007) assumed an infinitely deep layer, arriving at a two-dimensional (2-D) asymptotic solution. Pérez-Barrera et al. (Reference Pérez-Barrera, Pérez-Espinoza, Ortiz, Ramos and Cuevas2015) and Pérez-Barrera, Ortiz & Cuevas (Reference Pérez-Barrera, Ortiz and Cuevas2016) later considered channels of finite depth, solving specifically for the vertically averaged velocity profile  $\langle u_\theta \rangle _z (r)$. Following this, Ortiz-Pérez et al. (Reference Ortiz-Pérez, García-Ángel, Acuña-Ramírez, Vargas-Osuna, Pérez-Barrera and Cuevas2017) and Valenzuela-Delgado et al. (Reference Valenzuela-Delgado, Flores-Fuentes, Rivas-López, Sergiyenko, Lindner, Hernández-Balbuena and Rodríguez-Quiñonez2018a,Reference Valenzuela-Delgado, Ortiz-Pérez, Flores-Fuentes, Bravo-Zanoguera, Acuña-Ramírez, Ocampo-Díaz, Hernández-Balbuena, Rivas-López and Sergiyenkob) used a (semi-analytical) Galerkin approximation to predict steady, axisymmetric flow over radius and depth,
$\langle u_\theta \rangle _z (r)$. Following this, Ortiz-Pérez et al. (Reference Ortiz-Pérez, García-Ángel, Acuña-Ramírez, Vargas-Osuna, Pérez-Barrera and Cuevas2017) and Valenzuela-Delgado et al. (Reference Valenzuela-Delgado, Flores-Fuentes, Rivas-López, Sergiyenko, Lindner, Hernández-Balbuena and Rodríguez-Quiñonez2018a,Reference Valenzuela-Delgado, Ortiz-Pérez, Flores-Fuentes, Bravo-Zanoguera, Acuña-Ramírez, Ocampo-Díaz, Hernández-Balbuena, Rivas-López and Sergiyenkob) used a (semi-analytical) Galerkin approximation to predict steady, axisymmetric flow over radius and depth,  $u_\theta (r,z)$. A fully analytical solution
$u_\theta (r,z)$. A fully analytical solution  $u_\theta (r,z,t)$ for time-dependent annular magneto-Stokes flow does not exist in the literature, to our knowledge, despite the simplicity of the governing equation. Further, there is little discussion of the range of channel geometries for which the deep-layer approximation is valid. Yet, the assumption of infinite depth has been made for engineering problems involving shallow-layer flows (e.g. West et al. Reference West, Gleeson, Alderman, Collins and Berney2003) with strong vertical shear that depart greatly from the 2-D deep-layer solution.
$u_\theta (r,z,t)$ for time-dependent annular magneto-Stokes flow does not exist in the literature, to our knowledge, despite the simplicity of the governing equation. Further, there is little discussion of the range of channel geometries for which the deep-layer approximation is valid. Yet, the assumption of infinite depth has been made for engineering problems involving shallow-layer flows (e.g. West et al. Reference West, Gleeson, Alderman, Collins and Berney2003) with strong vertical shear that depart greatly from the 2-D deep-layer solution.
In this study, we unify and extend these previous efforts by: (i) providing the first complete analytical solution for time-dependent flow  $u_\theta (r,z,t)$ in a channel of arbitrary depth (§ 2), which we validate with laboratory experiments and direct numerical simulations (DNS) (§§ 3, 4); (ii) correctly distinguishing deep, transitional and shallow-layer flow regimes in terms of the appropriate geometric parameter (§ 2); (iii) deriving the shallow-layer asymptotic solution (§ 2); (iv) applying these findings to the design of a microfluidic mixer (§ 5); and (v) showing that the onset of shear-enhanced mixing occurs with the least electromagnetic forcing in the transitional flow regime (§ 5).
$u_\theta (r,z,t)$ in a channel of arbitrary depth (§ 2), which we validate with laboratory experiments and direct numerical simulations (DNS) (§§ 3, 4); (ii) correctly distinguishing deep, transitional and shallow-layer flow regimes in terms of the appropriate geometric parameter (§ 2); (iii) deriving the shallow-layer asymptotic solution (§ 2); (iv) applying these findings to the design of a microfluidic mixer (§ 5); and (v) showing that the onset of shear-enhanced mixing occurs with the least electromagnetic forcing in the transitional flow regime (§ 5).
2. Theory
2.1. Axisymmetric governing equations
We consider a free-surface layer of conducting fluid of depth  $h$ in the annular gap between two cylindrical electrodes of radius
$h$ in the annular gap between two cylindrical electrodes of radius  $r_i$ and
$r_i$ and  $r_o$ (
$r_o$ ( $r_i< r_o$). A controlled current
$r_i< r_o$). A controlled current  $I$ runs through the fluid from inner to outer electrode, and the entire annulus is subject to a vertical, imposed magnetic field
$I$ runs through the fluid from inner to outer electrode, and the entire annulus is subject to a vertical, imposed magnetic field  $\boldsymbol {B} = -B_0 \boldsymbol {e_z}$. Figure 1(a) shows a schematic of the annular channel with the imposed magnetic field and current. For a low-conductivity fluid like saltwater and small
$\boldsymbol {B} = -B_0 \boldsymbol {e_z}$. Figure 1(a) shows a schematic of the annular channel with the imposed magnetic field and current. For a low-conductivity fluid like saltwater and small  $B_0$, the magnetic field is quasi-static (e.g. Knaepen & Moreau Reference Knaepen and Moreau2008; Favier et al. Reference Favier, Godeferd, Cambon, Delache and Bos2011; Davidson Reference Davidson2016; Verma Reference Verma2017) and the total Lorentz force on the fluid may be expressed as the sum of the applied driving force and magnetic drag,
$B_0$, the magnetic field is quasi-static (e.g. Knaepen & Moreau Reference Knaepen and Moreau2008; Favier et al. Reference Favier, Godeferd, Cambon, Delache and Bos2011; Davidson Reference Davidson2016; Verma Reference Verma2017) and the total Lorentz force on the fluid may be expressed as the sum of the applied driving force and magnetic drag,
 \begin{equation} \boldsymbol{F}=\boldsymbol{J}\times\boldsymbol{B}=\sigma(\boldsymbol{E}\times\boldsymbol{B}) - \sigma B_0^2(u_r \boldsymbol{e}_r + u_\theta \boldsymbol{e}_\theta), \end{equation}
\begin{equation} \boldsymbol{F}=\boldsymbol{J}\times\boldsymbol{B}=\sigma(\boldsymbol{E}\times\boldsymbol{B}) - \sigma B_0^2(u_r \boldsymbol{e}_r + u_\theta \boldsymbol{e}_\theta), \end{equation}
after using Ohm's law to express the current density  $\boldsymbol {J}$ in terms of the electrical conductivity of the fluid
$\boldsymbol {J}$ in terms of the electrical conductivity of the fluid  $\sigma$, the imposed electric field
$\sigma$, the imposed electric field  $\boldsymbol {E}$ and the fluid velocity
$\boldsymbol {E}$ and the fluid velocity  $\boldsymbol {u}$.
$\boldsymbol {u}$.

Figure 1. (a) Diagram of the magneto-Stokes system. A power supply controls the electric current  $I$ through the fluid layer. Radially outwards (
$I$ through the fluid layer. Radially outwards ( $+\boldsymbol {e}_r$) current density
$+\boldsymbol {e}_r$) current density  $\boldsymbol {J}$ and downwards (
$\boldsymbol {J}$ and downwards ( $-\boldsymbol {e}_z$) magnetic field
$-\boldsymbol {e}_z$) magnetic field  $\boldsymbol {B}$ produce an azimuthal (
$\boldsymbol {B}$ produce an azimuthal ( $+\boldsymbol {e}_\theta$) Lorentz force
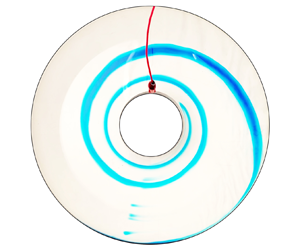
$+\boldsymbol {e}_\theta$) Lorentz force  $\boldsymbol {F}$ on the fluid. (b) Photograph of the channel used in laboratory experiments, with flow visualised by blue dye. The channel rests atop a wooden case of permanent magnets, which is replaced by a solenoid electromagnet (not pictured) for cases I–IV discussed in § 3.
$\boldsymbol {F}$ on the fluid. (b) Photograph of the channel used in laboratory experiments, with flow visualised by blue dye. The channel rests atop a wooden case of permanent magnets, which is replaced by a solenoid electromagnet (not pictured) for cases I–IV discussed in § 3.
Letting  $U$ denote a characteristic velocity scale, the magnitude of the magnetic drag (
$U$ denote a characteristic velocity scale, the magnitude of the magnetic drag ( ${\sim }\sigma B_0^2U$) may be compared with that of the viscous drag (
${\sim }\sigma B_0^2U$) may be compared with that of the viscous drag ( ${\sim }\varrho \nu U/h^2$) by means of the Hartmann number,
${\sim }\varrho \nu U/h^2$) by means of the Hartmann number,
 \begin{equation} {Ha} = \sqrt{\frac{\sigma B_0^2U}{\varrho\nu U/h^2}} = B_0 h\sqrt{\frac{\sigma}{\varrho\nu}}, \end{equation}
\begin{equation} {Ha} = \sqrt{\frac{\sigma B_0^2U}{\varrho\nu U/h^2}} = B_0 h\sqrt{\frac{\sigma}{\varrho\nu}}, \end{equation}
where  $\varrho$ and
$\varrho$ and  $\nu$ are the density and kinematic viscosity of the fluid, respectively.
$\nu$ are the density and kinematic viscosity of the fluid, respectively.
In our experiments,  ${Ha} \lesssim 10^{-2}$ and thus the only component of current density
${Ha} \lesssim 10^{-2}$ and thus the only component of current density  $\boldsymbol {J}$ that makes a significant contribution to the Lorentz force is
$\boldsymbol {J}$ that makes a significant contribution to the Lorentz force is  $\sigma \boldsymbol {E}$, which may be determined purely from the electric boundary conditions. A DC power supply can control the voltage across the sidewalls such that the total current
$\sigma \boldsymbol {E}$, which may be determined purely from the electric boundary conditions. A DC power supply can control the voltage across the sidewalls such that the total current  $I$ is set to a desired value at each time
$I$ is set to a desired value at each time  $t$. In this case, current rather than voltage is used as a control parameter, and the Lorentz force is appropriately expressed as
$t$. In this case, current rather than voltage is used as a control parameter, and the Lorentz force is appropriately expressed as
 \begin{equation} \boldsymbol{F} = \sigma(\boldsymbol{E}\times\boldsymbol{B})= \frac{B_0 I(t)}{2 {\rm \pi}r h}\boldsymbol{e_\theta}, \end{equation}
\begin{equation} \boldsymbol{F} = \sigma(\boldsymbol{E}\times\boldsymbol{B})= \frac{B_0 I(t)}{2 {\rm \pi}r h}\boldsymbol{e_\theta}, \end{equation}
neglecting any fringing of electric field lines due to the finite fluid depth (i.e. assuming that  $\partial _z \boldsymbol {E} = 0$).
$\partial _z \boldsymbol {E} = 0$).
The resulting circulatory flow is governed by the incompressible equations of motion,
 \begin{equation} \partial_t \boldsymbol{u} + \boldsymbol{u}\boldsymbol{\cdot}\boldsymbol{\nabla}\boldsymbol{u} ={-}\frac{1}{\varrho}\boldsymbol{\nabla} p + \nu \nabla^2 \boldsymbol{u}+ \frac{1}{\varrho}\boldsymbol{F},\quad \boldsymbol{\nabla}\boldsymbol{\cdot}\boldsymbol{u} = 0, \end{equation}
\begin{equation} \partial_t \boldsymbol{u} + \boldsymbol{u}\boldsymbol{\cdot}\boldsymbol{\nabla}\boldsymbol{u} ={-}\frac{1}{\varrho}\boldsymbol{\nabla} p + \nu \nabla^2 \boldsymbol{u}+ \frac{1}{\varrho}\boldsymbol{F},\quad \boldsymbol{\nabla}\boldsymbol{\cdot}\boldsymbol{u} = 0, \end{equation}
where  $p$ is the deviation in pressure from the static pressure field
$p$ is the deviation in pressure from the static pressure field  $\varrho g (h-z)$.
$\varrho g (h-z)$.
We scale radial distances  $r$ by the outer sidewall radius
$r$ by the outer sidewall radius  $r_o$, vertical distances
$r_o$, vertical distances  $z$ by the fluid depth
$z$ by the fluid depth  $h$ and electric current
$h$ and electric current  $I$ by its maximum value
$I$ by its maximum value  $I_0$, defining the non-dimensional quantities
$I_0$, defining the non-dimensional quantities  $\rho = r/r_o$,
$\rho = r/r_o$,  $\zeta =z/h$ and
$\zeta =z/h$ and  $\varUpsilon = I/I_0$. A velocity scale
$\varUpsilon = I/I_0$. A velocity scale  $U$ may be found by balancing the basal viscous drag (
$U$ may be found by balancing the basal viscous drag ( ${\sim }2{\nu U}/{h^2}$) and Lorentz forces (
${\sim }2{\nu U}/{h^2}$) and Lorentz forces ( ${\sim }B_0 I_0/[{\rm \pi} h \varrho (r_i+r_o)]$) at the surface mid-gap,
${\sim }B_0 I_0/[{\rm \pi} h \varrho (r_i+r_o)]$) at the surface mid-gap,  $z=h$,
$z=h$,  $r=(r_i+r_o)/2$:
$r=(r_i+r_o)/2$:
 \begin{equation} U = \frac{B_0 I_0 h}{2 {\rm \pi}\nu \varrho (r_i+r_o)}. \end{equation}
\begin{equation} U = \frac{B_0 I_0 h}{2 {\rm \pi}\nu \varrho (r_i+r_o)}. \end{equation}
This scale is used to produce the non-dimensional velocity  $\boldsymbol {\upsilon } = \upsilon _\rho \boldsymbol {e_r} + \upsilon _\theta \boldsymbol {e_\theta } + (h/r_o)\upsilon _\zeta \boldsymbol {e_z}$, with components
$\boldsymbol {\upsilon } = \upsilon _\rho \boldsymbol {e_r} + \upsilon _\theta \boldsymbol {e_\theta } + (h/r_o)\upsilon _\zeta \boldsymbol {e_z}$, with components  $\upsilon _\rho = u_r/U$,
$\upsilon _\rho = u_r/U$,  $\upsilon _\theta = u_\theta /U$ and
$\upsilon _\theta = u_\theta /U$ and  $\upsilon _\zeta = (r_o/h) u_z/U$. An inertial scale
$\upsilon _\zeta = (r_o/h) u_z/U$. An inertial scale  $\varrho {U}^2$ is used to non-dimensionalise reduced pressure as
$\varrho {U}^2$ is used to non-dimensionalise reduced pressure as  $\varPi = p/(\varrho {U}^2)$. Time is non-dimensionalised as
$\varPi = p/(\varrho {U}^2)$. Time is non-dimensionalised as  $\tau = t/T$ by a surface mid-gap advective time scale:
$\tau = t/T$ by a surface mid-gap advective time scale:
 \begin{equation} T=\frac{r_i+r_o}{U}. \end{equation}
\begin{equation} T=\frac{r_i+r_o}{U}. \end{equation}In sum, our non-dimensionalisation makes the mapping
 \begin{equation} (\boldsymbol{u}, p, I)(r,\theta,z,t) \mapsto (\boldsymbol{\upsilon}, \varPi, \varUpsilon)(\rho,\theta,\zeta,\tau). \end{equation}
\begin{equation} (\boldsymbol{u}, p, I)(r,\theta,z,t) \mapsto (\boldsymbol{\upsilon}, \varPi, \varUpsilon)(\rho,\theta,\zeta,\tau). \end{equation} We introduce an a priori control Reynolds number  $Re$ and a magnetic Reynolds number
$Re$ and a magnetic Reynolds number  ${Rm}$,
${Rm}$,
 \begin{equation} Re = \frac{h^2/\nu}{T} = \frac{B_0 I_0 h^3}{2 {\rm \pi}\nu ^2 \varrho (r_i+r_o)^2} \quad \text{and} \quad {Rm} = \frac{h^2/\eta}{T} = \frac{\nu}{\eta}Re, \end{equation}
\begin{equation} Re = \frac{h^2/\nu}{T} = \frac{B_0 I_0 h^3}{2 {\rm \pi}\nu ^2 \varrho (r_i+r_o)^2} \quad \text{and} \quad {Rm} = \frac{h^2/\eta}{T} = \frac{\nu}{\eta}Re, \end{equation}
where  $\eta = (\mu _0 \sigma )^{-1}$ is the fluid's magnetic diffusivity and
$\eta = (\mu _0 \sigma )^{-1}$ is the fluid's magnetic diffusivity and  $\mu _0$ is the magnetic permeability of free space. For
$\mu _0$ is the magnetic permeability of free space. For  ${Rm} \ll 1$, magnetic diffusion dominates over advection, and the quasi-static description of the Lorentz force (2.3) is valid (e.g. Knaepen & Moreau Reference Knaepen and Moreau2008; Favier et al. Reference Favier, Godeferd, Cambon, Delache and Bos2011; Davidson Reference Davidson2016; Verma Reference Verma2017). As defined,
${Rm} \ll 1$, magnetic diffusion dominates over advection, and the quasi-static description of the Lorentz force (2.3) is valid (e.g. Knaepen & Moreau Reference Knaepen and Moreau2008; Favier et al. Reference Favier, Godeferd, Cambon, Delache and Bos2011; Davidson Reference Davidson2016; Verma Reference Verma2017). As defined,  ${Rm} \lesssim 10^{-10}$ for our experiments.
${Rm} \lesssim 10^{-10}$ for our experiments.
Also relevant are the radius ratio  $\mathcal {R}$, aspect ratio
$\mathcal {R}$, aspect ratio  $\mathcal {H}$ and depth-to-gap-width ratio
$\mathcal {H}$ and depth-to-gap-width ratio  $\varGamma$:
$\varGamma$:
 \begin{equation} \mathcal{R} = r_i/r_o, \quad \mathcal{H} = h/r_o, \quad \text{and} \quad \varGamma = h/(r_o-r_i) = \mathcal{H}/(1-\mathcal{R}). \end{equation}
\begin{equation} \mathcal{R} = r_i/r_o, \quad \mathcal{H} = h/r_o, \quad \text{and} \quad \varGamma = h/(r_o-r_i) = \mathcal{H}/(1-\mathcal{R}). \end{equation} Symbols for all dimensional parameters are listed in table 1. Definitions of scales and non-dimensional parameters are collected in table 2. The full non-dimensional axisymmetric equations in scaled cylindrical coordinates ( $\rho,\theta,\zeta$) may be found in Appendix A.
$\rho,\theta,\zeta$) may be found in Appendix A.
Table 1. Dimensional parameter definitions. Values are given in § 3.

Table 2. Scales and non-dimensional parameters. All quantities below the dashed line are non-dimensional.

We assume vertical hydrostasy,  $0={\partial _{\zeta }\varPi }$, and cyclostrophic balance,
$0={\partial _{\zeta }\varPi }$, and cyclostrophic balance,  ${\upsilon _{\theta }^2}/{\rho }=\partial _{\rho }\varPi$, achieved via deflection of the free surface. Under these conditions, the meridional flow
${\upsilon _{\theta }^2}/{\rho }=\partial _{\rho }\varPi$, achieved via deflection of the free surface. Under these conditions, the meridional flow  $\boldsymbol {\upsilon }_\bot = \upsilon _\rho \boldsymbol {e_r} + \mathcal {H}\upsilon _\zeta \boldsymbol {e_z}$ vanishes, leaving a linear equation for azimuthal magneto-Stokes flow,
$\boldsymbol {\upsilon }_\bot = \upsilon _\rho \boldsymbol {e_r} + \mathcal {H}\upsilon _\zeta \boldsymbol {e_z}$ vanishes, leaving a linear equation for azimuthal magneto-Stokes flow,
 \begin{equation} Re\, \partial_{\tau}\upsilon_{\theta }={\nabla}^{2}_{\bot} \upsilon_\theta - \mathcal{H}^2\frac{\upsilon_\theta}{\rho^2} +\frac{\mathcal{R} +1}{\rho}\varUpsilon(\tau), \end{equation}
\begin{equation} Re\, \partial_{\tau}\upsilon_{\theta }={\nabla}^{2}_{\bot} \upsilon_\theta - \mathcal{H}^2\frac{\upsilon_\theta}{\rho^2} +\frac{\mathcal{R} +1}{\rho}\varUpsilon(\tau), \end{equation}where we have defined the operator
 \begin{equation} {\nabla}^{2}_{\bot}({\cdot}) = \left[\mathcal{H}^2 {\rho}^{{-}1} \partial_{\rho}{\rho}\partial_{\rho} + \partial_{\zeta}^2\right] ({\cdot}). \end{equation}
\begin{equation} {\nabla}^{2}_{\bot}({\cdot}) = \left[\mathcal{H}^2 {\rho}^{{-}1} \partial_{\rho}{\rho}\partial_{\rho} + \partial_{\zeta}^2\right] ({\cdot}). \end{equation} We consider the rectangular domain  $(\rho,\zeta ) \in (\mathcal {R},1)\times (0,1)$ with boundary conditions
$(\rho,\zeta ) \in (\mathcal {R},1)\times (0,1)$ with boundary conditions
 \begin{equation} \upsilon_\theta(\mathcal{R},\zeta,\tau)=\upsilon_\theta(1,\zeta,\tau)=\upsilon_\theta(\rho,0,\tau) = \left[\partial_{\zeta} \upsilon_\theta\right]_{\zeta=1} = 0. \end{equation}
\begin{equation} \upsilon_\theta(\mathcal{R},\zeta,\tau)=\upsilon_\theta(1,\zeta,\tau)=\upsilon_\theta(\rho,0,\tau) = \left[\partial_{\zeta} \upsilon_\theta\right]_{\zeta=1} = 0. \end{equation}
This approximation to the free-surface boundary conditions is appropriate as long as the deflection due to capillary action and centrifugation is negligible (e.g. Greenspan & Howard Reference Greenspan and Howard1963). The Froude number  ${Fr}$ compares the deflection of the free surface due to centrifugation (
${Fr}$ compares the deflection of the free surface due to centrifugation ( ${\sim }U^2 g^{-1}$) with the depth of the fluid (
${\sim }U^2 g^{-1}$) with the depth of the fluid ( $h$):
$h$):
 \begin{equation} {Fr} = \sqrt{{U^2 g^{{-}1}}/{h}}. \end{equation}
\begin{equation} {Fr} = \sqrt{{U^2 g^{{-}1}}/{h}}. \end{equation} Surface deflection due to capillary rise or dewetting is characterised by the capillary length (e.g. Martino et al. Reference Martino, De La Mora, Yoshida, Saito and Wilkes2006),  $l = \sqrt {\gamma /(\varrho g)}$. The Bond number
$l = \sqrt {\gamma /(\varrho g)}$. The Bond number  ${Bo}$ compares this length scale with the fluid depth:
${Bo}$ compares this length scale with the fluid depth:
 \begin{equation} {Bo} = (h/l)^2 = \varrho g h^2/\gamma. \end{equation}
\begin{equation} {Bo} = (h/l)^2 = \varrho g h^2/\gamma. \end{equation} In our validation experiments,  ${Fr} \lesssim 10^{-2}$ and
${Fr} \lesssim 10^{-2}$ and  ${Bo} \geqslant 4.4$, so we adopt (2.12).
${Bo} \geqslant 4.4$, so we adopt (2.12).
2.2. Spin up from rest
Solutions to (2.10), (2.12) that develop from an initially quiescent fluid ( $\upsilon _\theta =0$ at
$\upsilon _\theta =0$ at  $\tau = 0$) once constant electric current is applied (
$\tau = 0$) once constant electric current is applied ( $\varUpsilon = 1$ for
$\varUpsilon = 1$ for  $\tau >0$) may be expressed as
$\tau >0$) may be expressed as
 \begin{equation} \upsilon_\theta(\rho,\zeta,\tau) = \bar{\upsilon}_\theta(\rho,\zeta) + \upsilon_\theta'(\rho,\zeta,\tau). \end{equation}
\begin{equation} \upsilon_\theta(\rho,\zeta,\tau) = \bar{\upsilon}_\theta(\rho,\zeta) + \upsilon_\theta'(\rho,\zeta,\tau). \end{equation}The stationary component is
 \begin{align} \bar{\upsilon}_{\theta}(\rho,\zeta)&=\left(\frac{\mathcal{R}+1}{2}\right)\frac{2\zeta-\zeta^2}{\rho}\nonumber\\ &\quad -\sum_{n=1}^{\infty}\frac{2(\mathcal{R}+1)}{k_n^2 \mathcal{H}} \left[A_n {\rm{I}}_1\left(\frac{k_n }{\mathcal{H}}\rho\right)+B_n {\rm{K}}_1\left(\frac{k_n }{\mathcal{H} }\rho\right)\right] \sin (k_n \zeta), \end{align}
\begin{align} \bar{\upsilon}_{\theta}(\rho,\zeta)&=\left(\frac{\mathcal{R}+1}{2}\right)\frac{2\zeta-\zeta^2}{\rho}\nonumber\\ &\quad -\sum_{n=1}^{\infty}\frac{2(\mathcal{R}+1)}{k_n^2 \mathcal{H}} \left[A_n {\rm{I}}_1\left(\frac{k_n }{\mathcal{H}}\rho\right)+B_n {\rm{K}}_1\left(\frac{k_n }{\mathcal{H} }\rho\right)\right] \sin (k_n \zeta), \end{align}with
 $$\begin{gather} A_n=\frac{\mathcal{H}}{k_n \mathcal{R}}\left[\frac{\mathcal{R} {\rm{K}}_1\left({k_n \mathcal{R}}/{\mathcal{H} }\right)-{\rm{K}}_1\left({k_n }/{\mathcal{H}}\right)}{{\rm{I}}_1\left({k_n}/{\mathcal{H} }\right) {\rm{K}}_1\left({k_n\mathcal{R} }/{\mathcal{H}}\right)-{\rm{K}}_1\left({k_n}/{\mathcal{H} }\right) {\rm{I}}_1\left({k_n \mathcal{R} }/{\mathcal{H}}\right)}\right], \end{gather}$$
$$\begin{gather} A_n=\frac{\mathcal{H}}{k_n \mathcal{R}}\left[\frac{\mathcal{R} {\rm{K}}_1\left({k_n \mathcal{R}}/{\mathcal{H} }\right)-{\rm{K}}_1\left({k_n }/{\mathcal{H}}\right)}{{\rm{I}}_1\left({k_n}/{\mathcal{H} }\right) {\rm{K}}_1\left({k_n\mathcal{R} }/{\mathcal{H}}\right)-{\rm{K}}_1\left({k_n}/{\mathcal{H} }\right) {\rm{I}}_1\left({k_n \mathcal{R} }/{\mathcal{H}}\right)}\right], \end{gather}$$ $$\begin{gather}B_n=\frac{{\rm{I}}_1\left({k_n}/{\mathcal{H}}\right)-\mathcal{R} {\rm{I}}_1\left({k_n\mathcal{R} }/{\mathcal{H}}\right)}{\mathcal{R} {\rm{K}}_1\left({k_n \mathcal{R}}/{\mathcal{H} }\right)-{\rm{K}}_1\left({k_n }/{\mathcal{H}}\right)} A_n, \end{gather}$$
$$\begin{gather}B_n=\frac{{\rm{I}}_1\left({k_n}/{\mathcal{H}}\right)-\mathcal{R} {\rm{I}}_1\left({k_n\mathcal{R} }/{\mathcal{H}}\right)}{\mathcal{R} {\rm{K}}_1\left({k_n \mathcal{R}}/{\mathcal{H} }\right)-{\rm{K}}_1\left({k_n }/{\mathcal{H}}\right)} A_n, \end{gather}$$
where  ${\rm {I}}_1$ and
${\rm {I}}_1$ and  ${\rm {K}}_1$ denote modified Bessel functions of the first and second kind, respectively, and
${\rm {K}}_1$ denote modified Bessel functions of the first and second kind, respectively, and  $k_n={\rm \pi} (n-1/2)$.
$k_n={\rm \pi} (n-1/2)$.
The exact form of the time-dependent component  $\upsilon _\theta '(\rho,\zeta,\tau )$ is provided in Appendix A, but is well approximated for shallow layers (
$\upsilon _\theta '(\rho,\zeta,\tau )$ is provided in Appendix A, but is well approximated for shallow layers ( $\varGamma \ll 1$) by
$\varGamma \ll 1$) by
 \begin{equation} \upsilon_\theta'(\rho,\zeta,\tau) \approx{-}\bar{\upsilon}_{\theta}(\rho,\zeta)\exp\left(-\frac{T \tau}{T_{su}} \right), \end{equation}
\begin{equation} \upsilon_\theta'(\rho,\zeta,\tau) \approx{-}\bar{\upsilon}_{\theta}(\rho,\zeta)\exp\left(-\frac{T \tau}{T_{su}} \right), \end{equation}where the characteristic time scale for spin up from rest is
 \begin{equation} T_{su} = \frac{4 Re}{{\rm \pi} ^2}T = \frac{4 h^2}{{\rm \pi}^2 \nu }. \end{equation}
\begin{equation} T_{su} = \frac{4 Re}{{\rm \pi} ^2}T = \frac{4 h^2}{{\rm \pi}^2 \nu }. \end{equation}2.3. Shallow- and deep-layer regimes
The first term in (2.16) is equal to the asymptotic solution in the shallow-layer limit  $\varGamma \to 0$:
$\varGamma \to 0$:
 \begin{equation} \lim_{\varGamma \to 0}\bar{\upsilon}_{\theta}=\left(\frac{\mathcal{R}+1}{2}\right)\frac{2\zeta-\zeta^2}{\rho}, \end{equation}
\begin{equation} \lim_{\varGamma \to 0}\bar{\upsilon}_{\theta}=\left(\frac{\mathcal{R}+1}{2}\right)\frac{2\zeta-\zeta^2}{\rho}, \end{equation}
which inherits the inverse dependence on radius of the Lorentz force (since  $\lVert \boldsymbol {J}\rVert \propto 1/r$). The surface velocity profile is then identical to Taylor–Couette flow with inner and outer sidewall rotation rates given by
$\lVert \boldsymbol {J}\rVert \propto 1/r$). The surface velocity profile is then identical to Taylor–Couette flow with inner and outer sidewall rotation rates given by
 \begin{equation} \varOmega_i = \frac{B_0 I(t) h}{4 {\rm \pi}\varrho \nu r_i^2} \quad \text{and} \quad \varOmega_o = \frac{B_0 I(t) h}{4 {\rm \pi}\varrho \nu r_o^2}, \end{equation}
\begin{equation} \varOmega_i = \frac{B_0 I(t) h}{4 {\rm \pi}\varrho \nu r_i^2} \quad \text{and} \quad \varOmega_o = \frac{B_0 I(t) h}{4 {\rm \pi}\varrho \nu r_o^2}, \end{equation}
and naturally shares Taylor–Couette flow's kinematic reversibility for  $Re \ll 1$ (Taylor Reference Taylor1967).
$Re \ll 1$ (Taylor Reference Taylor1967).
For  $\mathcal {H}>0$, the series in (2.16) produces boundary layers at both sidewalls with 95 % thicknesses
$\mathcal {H}>0$, the series in (2.16) produces boundary layers at both sidewalls with 95 % thicknesses  $\delta _{i}$,
$\delta _{i}$,  $\delta _{o}$ defined such that
$\delta _{o}$ defined such that
 \begin{equation} \bar{\upsilon}_\theta = 0.95\lim_{\varGamma \to 0}\bar{\upsilon}_{\theta} \quad \text{at}\ \rho = (r_i + \delta_{i})/r_o,\; (r_o - \delta_{o})/r_o, \quad \zeta = 1. \end{equation}
\begin{equation} \bar{\upsilon}_\theta = 0.95\lim_{\varGamma \to 0}\bar{\upsilon}_{\theta} \quad \text{at}\ \rho = (r_i + \delta_{i})/r_o,\; (r_o - \delta_{o})/r_o, \quad \zeta = 1. \end{equation} Figure 2(a) shows the stationary solution given by (2.16) for a channel with geometric ratios  $\mathcal {H}=0.05$ and
$\mathcal {H}=0.05$ and  $\mathcal {R}=0.25$. Contours correspond to different vertical positions
$\mathcal {R}=0.25$. Contours correspond to different vertical positions  $\zeta$ within the fluid, and dashed yellow lines indicate the 95 % thicknesses of the sidewall boundary layers. The size of each boundary layer relative to the channel width scales as
$\zeta$ within the fluid, and dashed yellow lines indicate the 95 % thicknesses of the sidewall boundary layers. The size of each boundary layer relative to the channel width scales as
 \begin{equation} \varDelta_i \equiv \frac{\delta_{i}}{r_o - r_i} \approx 2.51 \varGamma^{1.08}, \quad \varDelta_o \equiv \frac{\delta_{o}}{r_o - r_i}\approx 2.11 \varGamma^{1.06}. \end{equation}
\begin{equation} \varDelta_i \equiv \frac{\delta_{i}}{r_o - r_i} \approx 2.51 \varGamma^{1.08}, \quad \varDelta_o \equiv \frac{\delta_{o}}{r_o - r_i}\approx 2.11 \varGamma^{1.06}. \end{equation}
All numerical factors and powers in (2.23a,b) are fit to values of  $\varDelta _i$,
$\varDelta _i$,  $\varDelta _o$ computed from (2.16) for
$\varDelta _o$ computed from (2.16) for  $0.01 \leqslant \mathcal {H} \leqslant 0.3$ and
$0.01 \leqslant \mathcal {H} \leqslant 0.3$ and  $0.01 \leqslant \mathcal {R} \leqslant 0.99$.
$0.01 \leqslant \mathcal {R} \leqslant 0.99$.

Figure 2. (a) Stationary magneto-Stokes flow solution given by (2.16) for a channel with geometric ratios  $\mathcal {H}=0.05$ and
$\mathcal {H}=0.05$ and  $\mathcal {R}=0.25$. Labelled contours trace the solution profile at different heights
$\mathcal {R}=0.25$. Labelled contours trace the solution profile at different heights  $\zeta$ above the channel base. A dash-dotted grey line shows the solution in the shallow limit (
$\zeta$ above the channel base. A dash-dotted grey line shows the solution in the shallow limit ( $\varGamma \to 0$), and yellow dashed lines correspond to the 95 % thicknesses of the sidewall boundary layers. (b) Magnitude of the surface mid-gap velocity as a function of depth-to-gap-width ratio
$\varGamma \to 0$), and yellow dashed lines correspond to the 95 % thicknesses of the sidewall boundary layers. (b) Magnitude of the surface mid-gap velocity as a function of depth-to-gap-width ratio  $\varGamma$ for a channel with
$\varGamma$ for a channel with  $\mathcal {R}=0.9$. The exact solution (black) is computed using (2.16). The curves corresponding to shallow- (teal) and deep-layer (pink) asymptotic solutions are plotted using (2.20) and (2.26), respectively.
$\mathcal {R}=0.9$. The exact solution (black) is computed using (2.16). The curves corresponding to shallow- (teal) and deep-layer (pink) asymptotic solutions are plotted using (2.20) and (2.26), respectively.
The scalings (2.23a,b) predict a shallow-layer regime in which sidewall boundary layers are distinct (i.e.  $\varDelta _i + \varDelta _o < 1$) for
$\varDelta _i + \varDelta _o < 1$) for  $\varGamma \lesssim 0.24$. This regime is also characterised by the growth of the mid-gap velocity magnitude
$\varGamma \lesssim 0.24$. This regime is also characterised by the growth of the mid-gap velocity magnitude
 \begin{equation} u_{\theta,{mid\text{-}gap}}=U\bar{\upsilon}_\theta(\rho=\mathcal{R}/2+1/2,\zeta=1), \end{equation}
\begin{equation} u_{\theta,{mid\text{-}gap}}=U\bar{\upsilon}_\theta(\rho=\mathcal{R}/2+1/2,\zeta=1), \end{equation}
with layer depth  $h$ necessary for the basal viscous drag (
$h$ necessary for the basal viscous drag ( ${\sim }2{\nu U}/{h^2} \propto U h^{-2}$) to balance the Lorentz force (
${\sim }2{\nu U}/{h^2} \propto U h^{-2}$) to balance the Lorentz force ( ${\sim }B_0 I_0/[{\rm \pi} h \varrho (r_i+r_o)] \propto h^{-1}$). Figure 2(b) shows the growth of
${\sim }B_0 I_0/[{\rm \pi} h \varrho (r_i+r_o)] \propto h^{-1}$). Figure 2(b) shows the growth of  $u_{\theta,{mid\text {-}gap}}$ (black curve) with layer depth closely following the linear dependence predicted by the asymptotic shallow-layer solution (2.20) (teal curve) for
$u_{\theta,{mid\text {-}gap}}$ (black curve) with layer depth closely following the linear dependence predicted by the asymptotic shallow-layer solution (2.20) (teal curve) for  $\varGamma \lesssim 0.24$.
$\varGamma \lesssim 0.24$.
If the layer depth is increased (while still keeping inertial forces small,  $Re \ll 1$), the dominant balance of Lorentz and sidewall viscous drag forces (
$Re \ll 1$), the dominant balance of Lorentz and sidewall viscous drag forces ( ${\sim }8 \nu U_{deep}/[r_o-r_i]^2$) leads to an alternate velocity scale
${\sim }8 \nu U_{deep}/[r_o-r_i]^2$) leads to an alternate velocity scale
 \begin{equation} U_{deep}= \frac{B_0 I_0 (r_o-r_i)^2}{8 {\rm \pi}h \nu \varrho (r_i+r_o)}=\frac{U}{4 \varGamma^2}. \end{equation}
\begin{equation} U_{deep}= \frac{B_0 I_0 (r_o-r_i)^2}{8 {\rm \pi}h \nu \varrho (r_i+r_o)}=\frac{U}{4 \varGamma^2}. \end{equation}
Using  $U_{deep}$ to non-dimensionalise velocity as
$U_{deep}$ to non-dimensionalise velocity as  $w_\theta = u_\theta /U_{deep}$, the steady solution for an infinitely deep channel is
$w_\theta = u_\theta /U_{deep}$, the steady solution for an infinitely deep channel is
 \begin{equation} \lim_{\varGamma \to\infty} \bar{w}_\theta=\frac{2 \left(1-\rho^2\right) \mathcal{R} ^2 \log (\mathcal{R} )-2 \left(1-\mathcal{R} ^2\right) \rho^2 \log \left(\rho\right)}{(1-\mathcal{R})^3 \rho}. \end{equation}
\begin{equation} \lim_{\varGamma \to\infty} \bar{w}_\theta=\frac{2 \left(1-\rho^2\right) \mathcal{R} ^2 \log (\mathcal{R} )-2 \left(1-\mathcal{R} ^2\right) \rho^2 \log \left(\rho\right)}{(1-\mathcal{R})^3 \rho}. \end{equation}See Gleeson et al. (Reference Gleeson, Roche, West and Gelb2004) for the dimensional form of (2.26).
For deep channels of finite depth ( $0.24 \lesssim \varGamma < \infty$), flow is invariant with height outside of a basal boundary layer with 95 % thickness
$0.24 \lesssim \varGamma < \infty$), flow is invariant with height outside of a basal boundary layer with 95 % thickness  $\delta _{b}$ defined such that
$\delta _{b}$ defined such that
 \begin{equation} \bar{w}_\theta = 0.95\lim_{\varGamma \to \infty}\bar{w}_{\theta} \quad \text{at} \ \rho = (1+\mathcal{R})/2, \quad \zeta = \delta_{b}/h. \end{equation}
\begin{equation} \bar{w}_\theta = 0.95\lim_{\varGamma \to \infty}\bar{w}_{\theta} \quad \text{at} \ \rho = (1+\mathcal{R})/2, \quad \zeta = \delta_{b}/h. \end{equation}The relative thickness scales as
 \begin{equation} \varDelta_b \equiv \delta_{b}/h \approx 0.831 \varGamma^{{-}0.961}. \end{equation}
\begin{equation} \varDelta_b \equiv \delta_{b}/h \approx 0.831 \varGamma^{{-}0.961}. \end{equation}
The numerical factor and power in (2.28) are fit to values of  $\varDelta _b$ computed from (2.16) for
$\varDelta _b$ computed from (2.16) for  $1 \leqslant \mathcal {H} \leqslant 20$ and
$1 \leqslant \mathcal {H} \leqslant 20$ and  $0.01 \leqslant \mathcal {R} \leqslant 0.99$.
$0.01 \leqslant \mathcal {R} \leqslant 0.99$.
We may then define a deep-layer regime with the condition  $\varDelta _b < 0.2$, satisfied for
$\varDelta _b < 0.2$, satisfied for  $\varGamma \gtrsim 4.4$. This regime is also characterised by the decrease of
$\varGamma \gtrsim 4.4$. This regime is also characterised by the decrease of  $u_{\theta,{mid\text {-}gap}}$ with layer depth, since the dependence of
$u_{\theta,{mid\text {-}gap}}$ with layer depth, since the dependence of  $u_{\theta,{mid\text {-}gap}}$ on
$u_{\theta,{mid\text {-}gap}}$ on  $h$ is mainly controlled by the Lorentz force (
$h$ is mainly controlled by the Lorentz force ( $\propto h^{-1}$). Figure 2(b) shows the change in
$\propto h^{-1}$). Figure 2(b) shows the change in  $u_{\theta,\textit{mid-gap}}$ (black curve) with layer depth closely following the inverse dependence predicted by the asymptotic deep-layer solution (2.26) (pink curve) for
$u_{\theta,\textit{mid-gap}}$ (black curve) with layer depth closely following the inverse dependence predicted by the asymptotic deep-layer solution (2.26) (pink curve) for  $\varGamma > 1$.
$\varGamma > 1$.
Figure 3(a) uses the conditions  $\varDelta _i + \varDelta _o < 1$ and
$\varDelta _i + \varDelta _o < 1$ and  $\varDelta _b < 0.2$ with the scalings (2.23a,b), (2.28) to demarcate shallow- and deep-layer regimes in the space of aspect and radius ratios. Teal, purple and pink dots in figure 3(a) correspond to shallow-layer, transitional and deep-layer flows in channels of the same radius ratio
$\varDelta _b < 0.2$ with the scalings (2.23a,b), (2.28) to demarcate shallow- and deep-layer regimes in the space of aspect and radius ratios. Teal, purple and pink dots in figure 3(a) correspond to shallow-layer, transitional and deep-layer flows in channels of the same radius ratio  $\mathcal {R}=0.9$, whose predicted radial and vertical profiles are plotted in panels (b,c), respectively. Asymptotic shallow- and deep-layer solutions (2.20), (2.26) are plotted as dashed curves.
$\mathcal {R}=0.9$, whose predicted radial and vertical profiles are plotted in panels (b,c), respectively. Asymptotic shallow- and deep-layer solutions (2.20), (2.26) are plotted as dashed curves.

Figure 3. (a) Regime diagram for annular magneto-Stokes flow in the space of radius ratios  $\mathcal {R}$ and aspect ratios
$\mathcal {R}$ and aspect ratios  $\mathcal {H}$. Renderings of cylindrical annuli correspond to axes values. Background tones grade from cool to warm with increasing
$\mathcal {H}$. Renderings of cylindrical annuli correspond to axes values. Background tones grade from cool to warm with increasing  $\varGamma$. A solid grey line indicates the boundary
$\varGamma$. A solid grey line indicates the boundary  $\varDelta _i + \varDelta _o \approx 1$ (predicted by (2.23a,b)) between shallow-layer and transitional regimes, while a dashed grey line indicates the boundary
$\varDelta _i + \varDelta _o \approx 1$ (predicted by (2.23a,b)) between shallow-layer and transitional regimes, while a dashed grey line indicates the boundary  $\varDelta _b \approx 0.2$ (predicted by (2.28)) between transitional and deep-layer regimes. Points labelled with roman numerals correspond to laboratory cases discussed in §§ 3, 4. Open markers correspond to DNS cases discussed in § 5.2. (b) A comparison of magneto-Stokes flows in channels of varying depth-to-gap-width ratio
$\varDelta _b \approx 0.2$ (predicted by (2.28)) between transitional and deep-layer regimes. Points labelled with roman numerals correspond to laboratory cases discussed in §§ 3, 4. Open markers correspond to DNS cases discussed in § 5.2. (b) A comparison of magneto-Stokes flows in channels of varying depth-to-gap-width ratio  $\varGamma$ at a fixed radius ratio
$\varGamma$ at a fixed radius ratio  $\mathcal {R}=0.9$. Plotted are radial profiles of surface azimuthal velocity predicted from theory (2.16) and scaled by surface values at the channel centre,
$\mathcal {R}=0.9$. Plotted are radial profiles of surface azimuthal velocity predicted from theory (2.16) and scaled by surface values at the channel centre,  $u_{\theta,{mid\text {-}gap}}$. Solid curves correspond to open markers of the same colour in the regime diagram (panel a). Dashed teal and pink curves show the corresponding shallow (2.20) and deep (2.26) asymptotic solutions, respectively.
$u_{\theta,{mid\text {-}gap}}$. Solid curves correspond to open markers of the same colour in the regime diagram (panel a). Dashed teal and pink curves show the corresponding shallow (2.20) and deep (2.26) asymptotic solutions, respectively.
3. Experimental methods
We validate the approximate solution (2.15) via four laboratory experiments (cases I–IV), matched with DNS of the nonlinear axisymmetric flow governed by (A1), (A2). This complementary approach permits us to test various physical effects not accounted for in our model: the DNS test the impact of meridional flow alone, while the laboratory experiments add the effects of surface tension and a dynamic free surface. The results of these validation cases are discussed in § 4. An additional laboratory experiment (case HS) is detailed in § 5.
3.1. Laboratory experiments
Validation experiments (cases I–IV) are performed using an open-top annular channel consisting of a 17.5 cm-radius steel outer cylindrical sidewall, acrylic base and a removable stainless steel inner cylindrical sidewall, which may be replaced with cylinders of different radii. The channel is placed inside the solenoidal electromagnet bore of UCLA's RoMag device (Xu, Horn & Aurnou Reference Xu, Horn and Aurnou2022), and a DC bench power supply provides a controlled current  $I$ between the channel sidewalls. An
$I$ between the channel sidewalls. An  $80.0 \pm 0.05\ {\rm g}\ {\rm l}^{-1}$
$80.0 \pm 0.05\ {\rm g}\ {\rm l}^{-1}$  ${\rm NaCl}:{\rm H}_2{\rm O}$ solution is used as the working fluid for all cases; 0.1 ml of dish detergent is added for every litre of solution to reduce surface tension, which is measured as
${\rm NaCl}:{\rm H}_2{\rm O}$ solution is used as the working fluid for all cases; 0.1 ml of dish detergent is added for every litre of solution to reduce surface tension, which is measured as  $\gamma = 38 \pm 4\ {\rm mN}\ {\rm m}^{-1}$ using the capillary rise method (e.g. Martino et al. Reference Martino, De La Mora, Yoshida, Saito and Wilkes2006). The fluid is estimated to have electrical conductivity
$\gamma = 38 \pm 4\ {\rm mN}\ {\rm m}^{-1}$ using the capillary rise method (e.g. Martino et al. Reference Martino, De La Mora, Yoshida, Saito and Wilkes2006). The fluid is estimated to have electrical conductivity  $\sigma = 12.3 \pm 0.1\ {\rm S}\ {\rm m}^{-1}$, kinematic viscosity
$\sigma = 12.3 \pm 0.1\ {\rm S}\ {\rm m}^{-1}$, kinematic viscosity  $\nu = (1.10 \pm 0.05) \times 10^{-6}\ {\rm m}^2\ {\rm s}^{-1}$ and density
$\nu = (1.10 \pm 0.05) \times 10^{-6}\ {\rm m}^2\ {\rm s}^{-1}$ and density  $\varrho = 1059.1 \pm 0.7\ {\rm kg}\ {\rm m}^{-3}$, using the salinity-based models of Park (Reference Park1964), Isdale, Spence & Tudhope (Reference Isdale, Spence and Tudhope1972) and Isdale & Morris (Reference Isdale and Morris1972), respectively.
$\varrho = 1059.1 \pm 0.7\ {\rm kg}\ {\rm m}^{-3}$, using the salinity-based models of Park (Reference Park1964), Isdale, Spence & Tudhope (Reference Isdale, Spence and Tudhope1972) and Isdale & Morris (Reference Isdale and Morris1972), respectively.
Inner radius, fluid height, electric current and magnetic field strength are varied across cases I–IV; values of these dimensional parameters are reported in table 3. Cases I–IV span three different radius ratios  $\mathcal {R}$ = 0.25, 0.44, 0.58 and two different aspect ratios
$\mathcal {R}$ = 0.25, 0.44, 0.58 and two different aspect ratios  $\mathcal {H}$ = 0.023, 0.046; these values correspond to the solid points in figure 3(a). Fluid depth is kept above the capillary length
$\mathcal {H}$ = 0.023, 0.046; these values correspond to the solid points in figure 3(a). Fluid depth is kept above the capillary length  $l = 0.19 \pm 0.01$ cm (
$l = 0.19 \pm 0.01$ cm ( ${Bo} > 1$) to minimise relative differences in depth due to capillary action. Voltage across the electrodes is maintained under
${Bo} > 1$) to minimise relative differences in depth due to capillary action. Voltage across the electrodes is maintained under  $\sim$1.5 V to prevent electrolysis of water. Under this constraint, electric current and magnetic field strength are held between 0.04 and 0.1 A and 20 and 35 mT, respectively, to keep
$\sim$1.5 V to prevent electrolysis of water. Under this constraint, electric current and magnetic field strength are held between 0.04 and 0.1 A and 20 and 35 mT, respectively, to keep  $Re < 1$ and
$Re < 1$ and  ${Fr}^2 \ll 1$. Values of these non-dimensional control parameters are reported in table 4.
${Fr}^2 \ll 1$. Values of these non-dimensional control parameters are reported in table 4.
Table 3. Dimensional experimental parameters and predicted velocity  $U$ at surface mid-gap (
$U$ at surface mid-gap ( $z=h, r=[r_i+r_o]/2$), computed using (2.5). Error in values of
$z=h, r=[r_i+r_o]/2$), computed using (2.5). Error in values of  $U$ reflect the propagation of measurement uncertainty of the control parameters.
$U$ reflect the propagation of measurement uncertainty of the control parameters.

Table 4. Non-dimensional experimental parameters. The radius ratio  $\mathcal {R}$, aspect ratio
$\mathcal {R}$, aspect ratio  $\mathcal {H}$, control Reynolds number
$\mathcal {H}$, control Reynolds number  $Re$, Froude number
$Re$, Froude number  ${Fr}$, Bond number
${Fr}$, Bond number  ${Bo}$, Hartmann number
${Bo}$, Hartmann number  ${Ha}$ and magnetic Reynolds number
${Ha}$ and magnetic Reynolds number  ${Rm}$ are defined in § 2.
${Rm}$ are defined in § 2.

Before the start of each case (I–IV), a streak of buoyant blue dye is drawn across the quiescent fluid surface. From  $t=0$ to
$t=0$ to  $t=0.5 {\rm \pi}T$, the power supply drives a constant current
$t=0.5 {\rm \pi}T$, the power supply drives a constant current  $I_0$, and an overhead camera records the dye advection. Blue-channel thresholding and Canny edge detection (Canny Reference Canny1986; Bradski Reference Bradski2000) are applied to the perspective-corrected video in order to track the (Lagrangian) angular position
$I_0$, and an overhead camera records the dye advection. Blue-channel thresholding and Canny edge detection (Canny Reference Canny1986; Bradski Reference Bradski2000) are applied to the perspective-corrected video in order to track the (Lagrangian) angular position  $\theta (r,t)$ of the leading dye streak edge. Uncertainty in
$\theta (r,t)$ of the leading dye streak edge. Uncertainty in  $\theta (r,t)$ is computed as the change in estimated position under a 10 % adjustment of colour threshold values. At every
$\theta (r,t)$ is computed as the change in estimated position under a 10 % adjustment of colour threshold values. At every  $\Delta t = 0.5 T_{su}$,
$\Delta t = 0.5 T_{su}$,  $\theta$ is determined at 15 points across the channel (in
$\theta$ is determined at 15 points across the channel (in  $r$), excluding the menisci at the sidewalls where dye spreads rapidly via adhesion instead of advection. A time series of surface velocity
$r$), excluding the menisci at the sidewalls where dye spreads rapidly via adhesion instead of advection. A time series of surface velocity  $u_\theta (r)$ is then estimated via second-order central difference of
$u_\theta (r)$ is then estimated via second-order central difference of  $\theta (r,t)$ over time.
$\theta (r,t)$ over time.
3.2. Direct numerical simulations
Cases I–IV are matched with DNS of nonlinear, axisymmetric flow governed by (A1), (A2) with initially quiescent flow ( $\boldsymbol {\upsilon }=0$ at
$\boldsymbol {\upsilon }=0$ at  $\tau = 0$,
$\tau = 0$,  $\varUpsilon = 1$ for
$\varUpsilon = 1$ for  $\tau >0$) and no-slip conditions on all boundaries except for the surface, which is treated as a free-slip rigid lid:
$\tau >0$) and no-slip conditions on all boundaries except for the surface, which is treated as a free-slip rigid lid:  $\boldsymbol {\upsilon }(\mathcal {R},\zeta,\tau )=\boldsymbol {\upsilon }(1,\zeta,\tau )=\boldsymbol {\upsilon }(\rho,0,\tau ) = 0$,
$\boldsymbol {\upsilon }(\mathcal {R},\zeta,\tau )=\boldsymbol {\upsilon }(1,\zeta,\tau )=\boldsymbol {\upsilon }(\rho,0,\tau ) = 0$,  $[\partial _{\zeta } \upsilon _\rho ]_{\zeta =1}=[\partial _{\zeta } \upsilon _\theta ]_{\zeta =1}=\upsilon _\zeta (\rho,1,\tau ) = 0$. We employ the Dedalus pseudospectral framework (Burns et al. Reference Burns, Vasil, Oishi, Lecoanet and Brown2020), expanding
$[\partial _{\zeta } \upsilon _\rho ]_{\zeta =1}=[\partial _{\zeta } \upsilon _\theta ]_{\zeta =1}=\upsilon _\zeta (\rho,1,\tau ) = 0$. We employ the Dedalus pseudospectral framework (Burns et al. Reference Burns, Vasil, Oishi, Lecoanet and Brown2020), expanding  $\upsilon _\zeta$ in 512 sine modes in
$\upsilon _\zeta$ in 512 sine modes in  $\zeta$ and all other fields in 512 cosine modes in
$\zeta$ and all other fields in 512 cosine modes in  $\zeta$; all fields are expanded in
$\zeta$; all fields are expanded in  $\rho$ with 256 Chebyshev modes. The no-slip condition is enforced at
$\rho$ with 256 Chebyshev modes. The no-slip condition is enforced at  $\zeta =0$ using the volume-penalty method (Hester, Vasil & Burns Reference Hester, Vasil and Burns2021), which adds spatially masked linear damping terms
$\zeta =0$ using the volume-penalty method (Hester, Vasil & Burns Reference Hester, Vasil and Burns2021), which adds spatially masked linear damping terms  $-G({\zeta }/{\delta }){\upsilon _\rho }/{\tau _{VP}}$,
$-G({\zeta }/{\delta }){\upsilon _\rho }/{\tau _{VP}}$,  $-G({\zeta }/{\delta }){\upsilon _\theta }/{\tau _{VP}}$,
$-G({\zeta }/{\delta }){\upsilon _\theta }/{\tau _{VP}}$,  $-G({\zeta }/{\delta }){\upsilon _\zeta }/{\tau _{VP}}$ to the corresponding components of the axisymmetric momentum equation (A1), where
$-G({\zeta }/{\delta }){\upsilon _\zeta }/{\tau _{VP}}$ to the corresponding components of the axisymmetric momentum equation (A1), where  $G(x) = [1-{\rm {erf}}(\sqrt {{\rm \pi} }x)]/2$ is a masking function and
$G(x) = [1-{\rm {erf}}(\sqrt {{\rm \pi} }x)]/2$ is a masking function and  $\tau _{VP}$ is the volume-penalty damping time scale non-dimensionalised by
$\tau _{VP}$ is the volume-penalty damping time scale non-dimensionalised by  $T$. The masking function is smoothed over a vertical length scale
$T$. The masking function is smoothed over a vertical length scale  $\delta$ (set here to
$\delta$ (set here to  $\delta =0.01$), which is used to determine an appropriate value for
$\delta =0.01$), which is used to determine an appropriate value for  $\tau _{VP}$. This is effected by requiring the damping length scale
$\tau _{VP}$. This is effected by requiring the damping length scale  $\sqrt {\tau _{VP}/Re}$ to be proportional to the smoothing scale:
$\sqrt {\tau _{VP}/Re}$ to be proportional to the smoothing scale:  $\sqrt {\tau _{VP}/Re} =\delta /\delta ^*$. The proportionality constant
$\sqrt {\tau _{VP}/Re} =\delta /\delta ^*$. The proportionality constant  $\delta ^*$ is set to the optimal value found by Hester et al. (Reference Hester, Vasil and Burns2021),
$\delta ^*$ is set to the optimal value found by Hester et al. (Reference Hester, Vasil and Burns2021),  $\delta ^*=3.11346786$; this choice of
$\delta ^*=3.11346786$; this choice of  $\delta ^*$ eliminates the displacement length error associated with the mask,
$\delta ^*$ eliminates the displacement length error associated with the mask,  $G(x)$. See Hester et al. (Reference Hester, Vasil and Burns2021) for details on optimising the volume-penalty method.
$G(x)$. See Hester et al. (Reference Hester, Vasil and Burns2021) for details on optimising the volume-penalty method.
In all simulations, the system is integrated from  $\tau =0$ to
$\tau =0$ to  $\tau = 1.1{\rm \pi}$ over
$\tau = 1.1{\rm \pi}$ over  $10^4$ time steps using the second-order semi-implicit backwards difference (SBDF2) scheme (Wang & Ruuth Reference Wang and Ruuth2008, (2.8)). Acceleration, pressure and rectilinear viscous terms are time integrated implicitly; the remaining terms are treated explicitly.
$10^4$ time steps using the second-order semi-implicit backwards difference (SBDF2) scheme (Wang & Ruuth Reference Wang and Ruuth2008, (2.8)). Acceleration, pressure and rectilinear viscous terms are time integrated implicitly; the remaining terms are treated explicitly.
Reported results match those obtained at half their spatial resolution as well as the analytical solution at  $t= 3 T_{su}$. The code used for these simulations and for the dye-tracking described in § 3.1 is available online (https://github.com/cysdavid/magnetoStokes).
$t= 3 T_{su}$. The code used for these simulations and for the dye-tracking described in § 3.1 is available online (https://github.com/cysdavid/magnetoStokes).
4. Results
Figure 4 shows three photographs of laboratory case I, taken when power is turned on (a), after 0.25 circulation times (b) and after 0.5 circulation times (c). The time-integrated analytical solution (2.15) and DNS results are overlain in magenta and grey, respectively. Laboratory, analytical and numerical results match well in the bulk, differing most within the boundary layers (dashed yellow lines). A close up (b, inset) of the inner boundary layer shows the laboratory dye streak and DNS curve trailing behind the analytical solution, resulting from the parasitic effect of meridional circulation on the steady-state azimuthal flow and from a lag in spin-up. The bulk flow also exhibits finite spin-up time effects. In each panel of figure 4, a magenta dot is placed on the analytical curve at  $r = (r_i + r_o)/2$. For flow that has fully spun up,
$r = (r_i + r_o)/2$. For flow that has fully spun up,  ${\rm \pi} T$ is the time it takes for this dot to make one revolution. In figure 4(b), the magenta dot has travelled slightly less than a quarter revolution from
${\rm \pi} T$ is the time it takes for this dot to make one revolution. In figure 4(b), the magenta dot has travelled slightly less than a quarter revolution from  $t=0$ to
$t=0$ to  $t = 0.25 {\rm \pi}T$, a product of the finite
$t = 0.25 {\rm \pi}T$, a product of the finite  $Re$ value in our experiments.
$Re$ value in our experiments.

Figure 4. Snapshots of a free-surface dye track (blue) from laboratory case I, (a) when power is turned on, (b) after  $\sim$5 spin up times and (c) after
$\sim$5 spin up times and (c) after  $\sim$10 spin up times. Time integrations of the approximate analytical solution (2.15) and DNS result are overlain as magenta and grey curves, respectively. Dotted yellow circles correspond to the 95 % thickness of each sidewall boundary layer as predicted from (2.15). The red cord near the 12 o'clock position in each photograph is the electrical wire leading from the power supply to the inner electrode.
$\sim$10 spin up times. Time integrations of the approximate analytical solution (2.15) and DNS result are overlain as magenta and grey curves, respectively. Dotted yellow circles correspond to the 95 % thickness of each sidewall boundary layer as predicted from (2.15). The red cord near the 12 o'clock position in each photograph is the electrical wire leading from the power supply to the inner electrode.
Figure 5 plots radial profiles of scaled azimuthal velocity for all four cases. Included are laboratory data (points), DNS results (dashed curves) and the approximate analytical solution given by (2.15) (solid curves) after 1 spin-up time (a), 2 spin-up times (b) and 3 spin-up times (c). Bars on the data points correspond to error introduced by the dye-tracking algorithm and from measurement uncertainty propagated through the computed velocity scale  $U$. The scaled velocity profiles evolve towards the
$U$. The scaled velocity profiles evolve towards the  $1/\rho$ curve (grey dash-dotted line) over time, apart from the boundary layers. A close up of the inner boundary layer for the two cases with
$1/\rho$ curve (grey dash-dotted line) over time, apart from the boundary layers. A close up of the inner boundary layer for the two cases with  $\mathcal {R} = 0.44$ (panel c, inset) shows a clear separation between the profiles for
$\mathcal {R} = 0.44$ (panel c, inset) shows a clear separation between the profiles for  $\mathcal {H} = 0.023$ (case II) and
$\mathcal {H} = 0.023$ (case II) and  $\mathcal {H} = 0.046$ (case III) and excellent agreement with theory.
$\mathcal {H} = 0.046$ (case III) and excellent agreement with theory.

Figure 5. Radial profiles of scaled azimuthal velocity at the free surface for cases I–IV at (a) 1 spin-up time after rest, (b) 2 spin-up times and (c) 3 spin-up times. Solid theoretical curves are computed using (2.15). The DNS are shown via dashed curves. Also plotted is the  $1/\rho$ profile (dash-dotted grey curve) corresponding to the shallow (
$1/\rho$ profile (dash-dotted grey curve) corresponding to the shallow ( $\varGamma \to 0$), long-time solution (2.20) at
$\varGamma \to 0$), long-time solution (2.20) at  $\zeta =1$. Error bars represent
$\zeta =1$. Error bars represent  ${\pm }1$ standard deviation propagated from uncertainty in the dye-tracking velocimetry algorithm and from uncertainty in the predicted velocity scale
${\pm }1$ standard deviation propagated from uncertainty in the dye-tracking velocimetry algorithm and from uncertainty in the predicted velocity scale  $U$ used to normalise the data. Rendered cylindrical annuli in the lower legend depict the channel geometry of each case.
$U$ used to normalise the data. Rendered cylindrical annuli in the lower legend depict the channel geometry of each case.
A slight separation between data, DNS, and theory at case I's peak in velocity (near  $\rho =0.3$) for
$\rho =0.3$) for  $t/T_{su} \leqslant 2$ can be seen in figure 5(a,b). The laboratory flow (blue points) spins up slower than the approximate solution (solid blue line), while the DNS result (dashed blue line) spins up faster. The gap between laboratory data and theory may be related to the dynamic adjustment of the free surface or the reduction of current density at sidewall menisci. In contrast, the gap between theory and DNS is largely the result of the sidewall viscous drag's effect on spin-up. As evident in the full solution in Appendix A, features with higher spatial frequency in the radial direction (e.g. the sharp peak near
$t/T_{su} \leqslant 2$ can be seen in figure 5(a,b). The laboratory flow (blue points) spins up slower than the approximate solution (solid blue line), while the DNS result (dashed blue line) spins up faster. The gap between laboratory data and theory may be related to the dynamic adjustment of the free surface or the reduction of current density at sidewall menisci. In contrast, the gap between theory and DNS is largely the result of the sidewall viscous drag's effect on spin-up. As evident in the full solution in Appendix A, features with higher spatial frequency in the radial direction (e.g. the sharp peak near  $\rho =0.3$) spin up faster than lower frequency features. This effect is neglected in the approximate solution (2.15) but is retained in the DNS.
$\rho =0.3$) spin up faster than lower frequency features. This effect is neglected in the approximate solution (2.15) but is retained in the DNS.
These finite- $Re$ simulations also retain nonlinear advection, and each DNS case exhibits a steady (for
$Re$ simulations also retain nonlinear advection, and each DNS case exhibits a steady (for  $t \gg T_{su}$) clockwise vortex in the
$t \gg T_{su}$) clockwise vortex in the  $\rho,\zeta$-plane near the inner sidewall where centrifugal forces are strongest (cf. Norouzi & Biglari Reference Norouzi and Biglari2013). This meridional circulation has a parasitic effect on the azimuthal flow, resulting in the slight gap between DNS and theory in figure 5(c). The largest root mean square error between theory and DNS (case I) is 3.3 % of the average DNS azimuthal velocity at
$\rho,\zeta$-plane near the inner sidewall where centrifugal forces are strongest (cf. Norouzi & Biglari Reference Norouzi and Biglari2013). This meridional circulation has a parasitic effect on the azimuthal flow, resulting in the slight gap between DNS and theory in figure 5(c). The largest root mean square error between theory and DNS (case I) is 3.3 % of the average DNS azimuthal velocity at  $t=3 T_{su}$. This difference is smaller than the error bars on the laboratory data and is expected to vanish with decreasing
$t=3 T_{su}$. This difference is smaller than the error bars on the laboratory data and is expected to vanish with decreasing  $Re$.
$Re$.
5. Low-Re mixing in magneto-Stokes flow
The expansion of ‘lab on a chip’ technology across a range of industrial and biomedical fields has increased demand for microfluidic devices that can efficiently mix chemical species at low  $Re$ (Pamme Reference Pamme2006; Mansur et al. Reference Mansur, Ye, Wang and Dai2008; Jeong et al. Reference Jeong, Chung, Kim and Lee2010). Magneto-Stokes systems (Yi, Qian & Bau Reference Yi, Qian and Bau2002; West et al. Reference West, Gleeson, Alderman, Collins and Berney2003; Gleeson et al. Reference Gleeson, Roche, West and Gelb2004) are particularly well suited to this purpose because they have no moving components that require miniaturisation and they work in simple, easily fabricated channel geometries (cf. Ehrfeld et al. Reference Ehrfeld, Golbig, Hessel, Löwe and Richter1999; Bertsch et al. Reference Bertsch, Heimgartner, Cousseau and Renaud2001).
$Re$ (Pamme Reference Pamme2006; Mansur et al. Reference Mansur, Ye, Wang and Dai2008; Jeong et al. Reference Jeong, Chung, Kim and Lee2010). Magneto-Stokes systems (Yi, Qian & Bau Reference Yi, Qian and Bau2002; West et al. Reference West, Gleeson, Alderman, Collins and Berney2003; Gleeson et al. Reference Gleeson, Roche, West and Gelb2004) are particularly well suited to this purpose because they have no moving components that require miniaturisation and they work in simple, easily fabricated channel geometries (cf. Ehrfeld et al. Reference Ehrfeld, Golbig, Hessel, Löwe and Richter1999; Bertsch et al. Reference Bertsch, Heimgartner, Cousseau and Renaud2001).
In the following subsections, we analyse the properties of magneto-Stokes flow relevant to low- $Re$ mixing. The design of efficient micromixers often focuses on the generation of vortices (Sudarsan & Ugaz Reference Sudarsan and Ugaz2006; Chang & Yang Reference Chang and Yang2007 and reference therein), which tend to augment mixing (e.g. Cetegen & Mohamad Reference Cetegen and Mohamad1993). Therefore, in § 5.1, we determine the conditions under which the Lorentz force can produce vorticity in shallow-layer magneto-Stokes flows in arbitrary (2-D) channel geometry. In micromixers that drive flow via electroosmosis rather than MHD, the generation of vorticity hinges on breaking the similitude between velocity and the electric field (Cummings et al. Reference Cummings, Griffiths, Nilson and Paul2000). An analogous similitude property exists for many magneto-Stokes flows, including our annular configuration, for which the 2-D velocity field and the Lorentz force are everywhere proportional by the same amount. In contrast to electroosmotic flows, annular magneto-Stokes flow is irrotational even when obstacles are placed in the channel to break similitude (cf. the obstacle-induced electroosmotic vortices in Dukhin Reference Dukhin1991; Ben & Chang Reference Ben and Chang2002).
$Re$ mixing. The design of efficient micromixers often focuses on the generation of vortices (Sudarsan & Ugaz Reference Sudarsan and Ugaz2006; Chang & Yang Reference Chang and Yang2007 and reference therein), which tend to augment mixing (e.g. Cetegen & Mohamad Reference Cetegen and Mohamad1993). Therefore, in § 5.1, we determine the conditions under which the Lorentz force can produce vorticity in shallow-layer magneto-Stokes flows in arbitrary (2-D) channel geometry. In micromixers that drive flow via electroosmosis rather than MHD, the generation of vorticity hinges on breaking the similitude between velocity and the electric field (Cummings et al. Reference Cummings, Griffiths, Nilson and Paul2000). An analogous similitude property exists for many magneto-Stokes flows, including our annular configuration, for which the 2-D velocity field and the Lorentz force are everywhere proportional by the same amount. In contrast to electroosmotic flows, annular magneto-Stokes flow is irrotational even when obstacles are placed in the channel to break similitude (cf. the obstacle-induced electroosmotic vortices in Dukhin Reference Dukhin1991; Ben & Chang Reference Ben and Chang2002).
We show in § 5.2 that, despite the lack of significant axial vorticity, shallow-layer annular magneto-Stokes flow enhances mixing via Taylor dispersion (Taylor Reference Taylor1953; Aris Reference Aris1956) or through an advectively dominated mechanism similar to that of a point-vortex flow (Rhines & Young Reference Rhines and Young1983; Flohr & Vassilicos Reference Flohr and Vassilicos1997). Our results extend to transitional and deep-layer flows, and they demonstrate that shear enhancement of mixing is initiated for the least electromagnetic effort ( $B_0 I_0$) in
$B_0 I_0$) in  $\varGamma \approx 1$ channels.
$\varGamma \approx 1$ channels.
5.1. Irrotationality in shallow-layer magneto-Stokes systems
We consider a magneto-Stokes micromixer of uniform depth  $h$ and arbitrary planform (i.e. lateral boundary geometry) placed in a vertical magnetic field
$h$ and arbitrary planform (i.e. lateral boundary geometry) placed in a vertical magnetic field  $\boldsymbol {B} = B_z \boldsymbol {e_z}$. The governing equation (2.10) generalises to
$\boldsymbol {B} = B_z \boldsymbol {e_z}$. The governing equation (2.10) generalises to
 \begin{equation} Re \left(\partial_\tau \boldsymbol{\upsilon} + \boldsymbol{\upsilon}\boldsymbol{\cdot}\boldsymbol{\nabla}_{\text{2D}}\boldsymbol{\upsilon}\right)={-}\boldsymbol{\nabla}_{\text{2D}}P + \mathcal{H}^2\nabla_{\text{2D}}^2\boldsymbol{\upsilon} + \partial_\zeta^2\boldsymbol{\upsilon} + \boldsymbol{f}, \quad \boldsymbol{\nabla}_{\text{2D}} \boldsymbol{\cdot} \boldsymbol{\upsilon} = 0, \end{equation}
\begin{equation} Re \left(\partial_\tau \boldsymbol{\upsilon} + \boldsymbol{\upsilon}\boldsymbol{\cdot}\boldsymbol{\nabla}_{\text{2D}}\boldsymbol{\upsilon}\right)={-}\boldsymbol{\nabla}_{\text{2D}}P + \mathcal{H}^2\nabla_{\text{2D}}^2\boldsymbol{\upsilon} + \partial_\zeta^2\boldsymbol{\upsilon} + \boldsymbol{f}, \quad \boldsymbol{\nabla}_{\text{2D}} \boldsymbol{\cdot} \boldsymbol{\upsilon} = 0, \end{equation}
where we now permit non-axisymmetry and lateral pressure gradients but retain vertical hydrostasy ( $\boldsymbol {\upsilon } \boldsymbol {\cdot } \boldsymbol {e_z} = 0$). Here, we have altered the non-dimensionalisation in § 2.1 to use a generic horizontal length scale
$\boldsymbol {\upsilon } \boldsymbol {\cdot } \boldsymbol {e_z} = 0$). Here, we have altered the non-dimensionalisation in § 2.1 to use a generic horizontal length scale  $L$ in place of
$L$ in place of  $r_o$,
$r_o$,  $r_i$, and defined
$r_i$, and defined  $\boldsymbol {\nabla }_{\text {2D}}$ such that
$\boldsymbol {\nabla }_{\text {2D}}$ such that  $\boldsymbol {\nabla } ({\cdot })= h^{-1}[\mathcal {H}\boldsymbol {\nabla }_{\text {2D}} + \boldsymbol {e_z}\partial _\zeta ]({\cdot })$. Dimensionless pressure
$\boldsymbol {\nabla } ({\cdot })= h^{-1}[\mathcal {H}\boldsymbol {\nabla }_{\text {2D}} + \boldsymbol {e_z}\partial _\zeta ]({\cdot })$. Dimensionless pressure  $P$ and horizontal Lorentz force
$P$ and horizontal Lorentz force  $\boldsymbol {f}$ have been scaled with
$\boldsymbol {f}$ have been scaled with  $\varrho \nu U L h^{-2}$ and
$\varrho \nu U L h^{-2}$ and  $\varrho \nu U h^{-2}$, respectively.
$\varrho \nu U h^{-2}$, respectively.
In the limits  $Re,\mathcal {H} \to 0$, appropriate for lab-on-a-chip systems, we make a Hele-Shaw approximation (Hele-Shaw Reference Hele-Shaw1898) motivated by the form of the annular shallow-layer solution (2.20):
$Re,\mathcal {H} \to 0$, appropriate for lab-on-a-chip systems, we make a Hele-Shaw approximation (Hele-Shaw Reference Hele-Shaw1898) motivated by the form of the annular shallow-layer solution (2.20):  $\boldsymbol {\upsilon } = (2\zeta - \zeta ^2)\boldsymbol {\upsilon }_{\text {2D}}$ where
$\boldsymbol {\upsilon } = (2\zeta - \zeta ^2)\boldsymbol {\upsilon }_{\text {2D}}$ where  $\partial _\zeta \boldsymbol {\upsilon }_{\text {2D}} = 0$. Applying these assumptions to (5.1a,b) yields
$\partial _\zeta \boldsymbol {\upsilon }_{\text {2D}} = 0$. Applying these assumptions to (5.1a,b) yields
 \begin{equation} \boldsymbol{\upsilon}_{\text{2D}} = \tfrac{1}{2}\left(\boldsymbol{f}-\boldsymbol{\nabla}_{\text{2D}}P\right), \quad \boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{\upsilon}_{\text{2D}} = 0 \quad \text{on}\ \partial\mathcal{D}, \end{equation}
\begin{equation} \boldsymbol{\upsilon}_{\text{2D}} = \tfrac{1}{2}\left(\boldsymbol{f}-\boldsymbol{\nabla}_{\text{2D}}P\right), \quad \boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{\upsilon}_{\text{2D}} = 0 \quad \text{on}\ \partial\mathcal{D}, \end{equation}
where  $\boldsymbol {n}$ denotes the unit vector normal to the lateral boundaries
$\boldsymbol {n}$ denotes the unit vector normal to the lateral boundaries  $\partial \mathcal {D}$. Then, the quasi-2-D flow is irrotational if and only if
$\partial \mathcal {D}$. Then, the quasi-2-D flow is irrotational if and only if
 \begin{equation} \boldsymbol{e_z}\boldsymbol{\cdot}\left(\boldsymbol{\nabla}_{\text{2D}}\times \boldsymbol{f}\right) = \frac{h^2 \sigma}{\varrho \nu U}\left[ B_z \partial_z E_z - \left(\boldsymbol{E}\boldsymbol{\cdot}\boldsymbol{\nabla} \right)B_z\right] = 0, \end{equation}
\begin{equation} \boldsymbol{e_z}\boldsymbol{\cdot}\left(\boldsymbol{\nabla}_{\text{2D}}\times \boldsymbol{f}\right) = \frac{h^2 \sigma}{\varrho \nu U}\left[ B_z \partial_z E_z - \left(\boldsymbol{E}\boldsymbol{\cdot}\boldsymbol{\nabla} \right)B_z\right] = 0, \end{equation}
where we have used Gauss’s law ( $\partial _z B_z = 0$) and neglected free charges (
$\partial _z B_z = 0$) and neglected free charges ( $\boldsymbol {\nabla } \boldsymbol {\cdot } \boldsymbol {E}=0$). Thus, vorticity can be generated in a magneto-Stokes micromixer given strong vertical gradients in
$\boldsymbol {\nabla } \boldsymbol {\cdot } \boldsymbol {E}=0$). Thus, vorticity can be generated in a magneto-Stokes micromixer given strong vertical gradients in  $E_z$ or horizontal gradients in
$E_z$ or horizontal gradients in  $B_z$.
$B_z$.
Since the quasistatic electromagnetic fields can be prescribed, the resulting 2-D flow may be readily predicted using (5.2a,b) after solving the pressure equation,
 \begin{equation} \nabla_{\text{2D}}^2 P = \boldsymbol{\nabla}_{\text{2D}} \boldsymbol{\cdot} \boldsymbol{f}, \quad \boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{\nabla}_{\text{2D}}P = \boldsymbol{n}\boldsymbol{\cdot} \boldsymbol{f} \quad \text{on} \ \partial\mathcal{D}. \end{equation}
\begin{equation} \nabla_{\text{2D}}^2 P = \boldsymbol{\nabla}_{\text{2D}} \boldsymbol{\cdot} \boldsymbol{f}, \quad \boldsymbol{n} \boldsymbol{\cdot} \boldsymbol{\nabla}_{\text{2D}}P = \boldsymbol{n}\boldsymbol{\cdot} \boldsymbol{f} \quad \text{on} \ \partial\mathcal{D}. \end{equation}This problem is greatly simplified if the Lorentz force is non-divergent:
 \begin{equation} \boldsymbol{\nabla}_{\text{2D}} \boldsymbol{\cdot} \boldsymbol{f} = \frac{h^2 \sigma}{\varrho \nu U} \boldsymbol{E}\boldsymbol{\cdot}\left(\boldsymbol{\nabla} \times \boldsymbol{B}\right)=0, \end{equation}
\begin{equation} \boldsymbol{\nabla}_{\text{2D}} \boldsymbol{\cdot} \boldsymbol{f} = \frac{h^2 \sigma}{\varrho \nu U} \boldsymbol{E}\boldsymbol{\cdot}\left(\boldsymbol{\nabla} \times \boldsymbol{B}\right)=0, \end{equation}and if the boundaries are perfectly conducting:
 \begin{equation} \boldsymbol{n}\times \boldsymbol{E}=0\quad \text{on} \ \partial \mathcal{D}, \end{equation}
\begin{equation} \boldsymbol{n}\times \boldsymbol{E}=0\quad \text{on} \ \partial \mathcal{D}, \end{equation}
such that  $\boldsymbol {n}\boldsymbol {\cdot } \boldsymbol {f}=0$ on
$\boldsymbol {n}\boldsymbol {\cdot } \boldsymbol {f}=0$ on  $\partial \mathcal {D}$. The relations (5.4a,b)–(5.6) imply
$\partial \mathcal {D}$. The relations (5.4a,b)–(5.6) imply  $\boldsymbol {\nabla }_{\text {2D}} P = 0$ identically, which results in similitude between the prescribed Lorentz force and the resultant velocity field:
$\boldsymbol {\nabla }_{\text {2D}} P = 0$ identically, which results in similitude between the prescribed Lorentz force and the resultant velocity field:  $\boldsymbol {\upsilon }_{\text {2D}} =\frac {1}{2} \boldsymbol {f}$.
$\boldsymbol {\upsilon }_{\text {2D}} =\frac {1}{2} \boldsymbol {f}$.
An analogous similitude exists for some electrokinetic flows, where the velocity is proportional to the applied electric field instead of the Lorentz force (Cummings et al. Reference Cummings, Griffiths, Nilson and Paul2000). These electrokinetic flows are necessarily irrotational by nature of the quasistatic electric fields used to drive them, and thus the key to generating vorticity lies in breaking similitude (Dukhin Reference Dukhin1991; Ben & Chang Reference Ben and Chang2002). In contrast, 2-D magneto-Stokes flows are only irrotational if (5.3) is satisfied, which is independent of the similitude conditions (5.5), (5.6). Thus, magneto-Stokes micromixers can benefit simultaneously from the presence of vorticity and the analytical convenience of similitude between the velocity and imposed Lorentz force.
If (5.3), (5.5) and (5.6) are all satisfied, as is the case for the annular device considered in this work, then the Lorentz force and velocity are proportional to the gradient of a potential  $\varPhi$ that is possibly multi-valued (like that of a point vortex; Lamb Reference Lamb1906). Potential flow is maintained even when similitude is broken (e.g. by the addition of an electrically insulating obstacle to the flow). The only change is the contribution of pressure to the total potential:
$\varPhi$ that is possibly multi-valued (like that of a point vortex; Lamb Reference Lamb1906). Potential flow is maintained even when similitude is broken (e.g. by the addition of an electrically insulating obstacle to the flow). The only change is the contribution of pressure to the total potential:
 \begin{equation} \boldsymbol{\upsilon}_{\text{2D}} = \tfrac{1}{2}\boldsymbol{\nabla}_{\text{2D}}\left(\varPhi-P\right). \end{equation}
\begin{equation} \boldsymbol{\upsilon}_{\text{2D}} = \tfrac{1}{2}\boldsymbol{\nabla}_{\text{2D}}\left(\varPhi-P\right). \end{equation}
The pressure field  $P$ may be constructed to enforce the no-flux condition on the lateral boundaries using potential theory (e.g. Lamb Reference Lamb1906; Milne-Thomson Reference Milne-Thomson1938).
$P$ may be constructed to enforce the no-flux condition on the lateral boundaries using potential theory (e.g. Lamb Reference Lamb1906; Milne-Thomson Reference Milne-Thomson1938).
In practice, these magneto-Stokes potential flows readily arise even with moderate gradients in magnetic field strength and fringing of electric field lines near menisci. Figure 6 shows magneto-Stokes flow around an electrically insulating plastic obstacle in the annular device (case HS), resting on an array of permanent magnets with moderate horizontal variability in field strength (with 1 standard deviation equal to 27 % of the mean). Despite these gradients in  $B_z$ and the presence of non-negligible surface tension effects (
$B_z$ and the presence of non-negligible surface tension effects ( ${Bo} = 1.1$), the dye streaks coincide with approximate potential flow streamlines (black overlay) obtained using the Milne-Thomson circle theorem (Milne-Thomson Reference Milne-Thomson1938). Thus, we expect magneto-Stokes micromixers to be robust to surface tension effects and moderate variations in magnetic field strength.
${Bo} = 1.1$), the dye streaks coincide with approximate potential flow streamlines (black overlay) obtained using the Milne-Thomson circle theorem (Milne-Thomson Reference Milne-Thomson1938). Thus, we expect magneto-Stokes micromixers to be robust to surface tension effects and moderate variations in magnetic field strength.

Figure 6. Dye-visualised laboratory flow (case HS) around a circular, electrically insulating obstacle (white disk). Overlain in black are approximate potential flow streamlines obtained using the Milne-Thomson circle theorem (Milne-Thomson Reference Milne-Thomson1938). Grey curves indicate the potential flow doublet that produces the circular obstacle streamline.
5.2. Enhanced mixing in annular magneto-Stokes flow
Although annular magneto-Stokes flows are vorticity free in the shallow limit, they make for robust, easily fabricated micromixing systems. Further, they exhibit multiple regimes of enhanced mixing, which we characterise here. Mixing effects in annular magneto-Stokes flows were first studied by Gleeson & West (Reference Gleeson and West2002) and Gleeson et al. (Reference Gleeson, Roche, West and Gelb2004). The authors focused on the deep limit ( $\varGamma \to \infty$), which renders the flow two-dimensional and enabled them to derive analytical asymptotic predictions for mixing time. These scaling laws are extensively supported by 2-D DNS (Gleeson et al. Reference Gleeson, Roche, West and Gelb2004), but exhibit large errors when compared with experimental results for the shallow-layer systems most relevant to compact, lab-on-a-chip applications (West et al. Reference West, Gleeson, Alderman, Collins and Berney2003). To address this gap, we generalise the scaling laws of Gleeson et al. (Reference Gleeson, Roche, West and Gelb2004) to finite
$\varGamma \to \infty$), which renders the flow two-dimensional and enabled them to derive analytical asymptotic predictions for mixing time. These scaling laws are extensively supported by 2-D DNS (Gleeson et al. Reference Gleeson, Roche, West and Gelb2004), but exhibit large errors when compared with experimental results for the shallow-layer systems most relevant to compact, lab-on-a-chip applications (West et al. Reference West, Gleeson, Alderman, Collins and Berney2003). To address this gap, we generalise the scaling laws of Gleeson et al. (Reference Gleeson, Roche, West and Gelb2004) to finite  $\varGamma$ systems, using the analytical solution developed in § 2 and validated in § 4.
$\varGamma$ systems, using the analytical solution developed in § 2 and validated in § 4.
The homogenisation of solute concentration  $c$ is governed by
$c$ is governed by
 \begin{equation} {Pe}\left[\partial_\tau c + (1+\mathcal{R})\omega\partial_\theta c\right] = \frac{\mathcal{H}^2}{\rho^2}\partial_\theta^2 c + {\nabla}^{2}_{\bot}c, \end{equation}
\begin{equation} {Pe}\left[\partial_\tau c + (1+\mathcal{R})\omega\partial_\theta c\right] = \frac{\mathcal{H}^2}{\rho^2}\partial_\theta^2 c + {\nabla}^{2}_{\bot}c, \end{equation}
where  $\omega$ is the angular velocity field. The dominance of advection over diffusion is controlled by the Péclet number (
$\omega$ is the angular velocity field. The dominance of advection over diffusion is controlled by the Péclet number ( ${Pe}$), defined via the Reynolds and Schmidt (
${Pe}$), defined via the Reynolds and Schmidt ( ${Sc}$) numbers as
${Sc}$) numbers as
 \begin{equation} {Pe} = {Sc} Re, \quad {Sc}=\nu/\kappa_c, \end{equation}
\begin{equation} {Pe} = {Sc} Re, \quad {Sc}=\nu/\kappa_c, \end{equation}
where  $\kappa _c$ denotes the molecular diffusivity of the solute. So long as
$\kappa _c$ denotes the molecular diffusivity of the solute. So long as  $Re \ll \min ({Pe},1)$, the spin-up period
$Re \ll \min ({Pe},1)$, the spin-up period  $T_{su}$ is the shortest time scale, and we consider the flow to be quasi-steady such that the angular velocity in (5.8) may be computed as
$T_{su}$ is the shortest time scale, and we consider the flow to be quasi-steady such that the angular velocity in (5.8) may be computed as  $\omega = \bar {\upsilon }_\theta (\rho,\zeta )/\rho$ using the stationary solution (2.16).
$\omega = \bar {\upsilon }_\theta (\rho,\zeta )/\rho$ using the stationary solution (2.16).
We consider a simple non-axisymmetric initial condition
 \begin{equation} c(\rho,\theta,\zeta,0)=c_0(\theta) = \begin{cases} 0, & -{\rm \pi}/2 < \theta \leqslant {\rm \pi}/2\\ 1, & {\rm \pi}/2 < \theta \leqslant 3 {\rm \pi}/2 \end{cases}, \end{equation}
\begin{equation} c(\rho,\theta,\zeta,0)=c_0(\theta) = \begin{cases} 0, & -{\rm \pi}/2 < \theta \leqslant {\rm \pi}/2\\ 1, & {\rm \pi}/2 < \theta \leqslant 3 {\rm \pi}/2 \end{cases}, \end{equation}
and define a mixing norm  $m$, following Gleeson et al. (Reference Gleeson, Roche, West and Gelb2004), as the normalised root mean square deviation of the concentration field from its average value,
$m$, following Gleeson et al. (Reference Gleeson, Roche, West and Gelb2004), as the normalised root mean square deviation of the concentration field from its average value,  $\bar {c}$:
$\bar {c}$:
 \begin{equation} m(t/T) = \frac{\left\Vert c - \bar{c}\right\Vert}{\left\Vert c_0 - \bar{c} \right\Vert}, \quad \Vert {\cdot} \Vert^2 = \frac{1}{{\rm \pi}(1-\mathcal{R}^2)}\int_0^1\int_0^{2{\rm \pi}}\int_{\mathcal{R}}^{1}({\cdot})^2\rho \,\mathrm{d}\rho\,\mathrm{d}\theta\,\mathrm{d}\zeta, \end{equation}
\begin{equation} m(t/T) = \frac{\left\Vert c - \bar{c}\right\Vert}{\left\Vert c_0 - \bar{c} \right\Vert}, \quad \Vert {\cdot} \Vert^2 = \frac{1}{{\rm \pi}(1-\mathcal{R}^2)}\int_0^1\int_0^{2{\rm \pi}}\int_{\mathcal{R}}^{1}({\cdot})^2\rho \,\mathrm{d}\rho\,\mathrm{d}\theta\,\mathrm{d}\zeta, \end{equation}
such that  $m(0)=1$. The mixing time
$m(0)=1$. The mixing time  $t_M$ is then defined as the time it takes for
$t_M$ is then defined as the time it takes for  $m$ to shrink to some value
$m$ to shrink to some value  $M<1$. Although other metrics exist (e.g. the eigenvalue-base approach of Cerbelli et al. Reference Cerbelli, Adrover, Garofalo and Giona2009),
$M<1$. Although other metrics exist (e.g. the eigenvalue-base approach of Cerbelli et al. Reference Cerbelli, Adrover, Garofalo and Giona2009),  $t_M$ benefits from its clear physical meaning and applicability to all mixing regimes. In each of these regimes, predictions for
$t_M$ benefits from its clear physical meaning and applicability to all mixing regimes. In each of these regimes, predictions for  $t_M/T$ as a function of
$t_M/T$ as a function of  ${Pe}$,
${Pe}$,  $\varGamma$,
$\varGamma$,  $\mathcal {R}$ follow from the appropriate asymptotic reduction of (5.8).
$\mathcal {R}$ follow from the appropriate asymptotic reduction of (5.8).
5.2.1. Diffusion-dominated regime
For  ${Pe} \ll 1$, lateral diffusion occurs before advection can effectively shear the tracer concentration front. Solving (5.8), (5.10) in the absence of advection and retaining the effect of the fundamental mode yields the scaling law
${Pe} \ll 1$, lateral diffusion occurs before advection can effectively shear the tracer concentration front. Solving (5.8), (5.10) in the absence of advection and retaining the effect of the fundamental mode yields the scaling law
 \begin{equation} t_M/T \sim \frac{1}{\mathcal{H}^2 \lambda_{11}^2}\ln{\left(\frac{2\sqrt{2}}{{\rm \pi} M}\right)}{Pe}, \end{equation}
\begin{equation} t_M/T \sim \frac{1}{\mathcal{H}^2 \lambda_{11}^2}\ln{\left(\frac{2\sqrt{2}}{{\rm \pi} M}\right)}{Pe}, \end{equation}
where  $\lambda _{11}$ is the smallest positive root of
$\lambda _{11}$ is the smallest positive root of  ${\rm {J}}_1'(\lambda \mathcal {R}){\rm {Y}}_1'(\lambda )-{\rm {Y}}_1'(\lambda \mathcal {R}){\rm {J}}_1'(\lambda )=0$. We assume
${\rm {J}}_1'(\lambda \mathcal {R}){\rm {Y}}_1'(\lambda )-{\rm {Y}}_1'(\lambda \mathcal {R}){\rm {J}}_1'(\lambda )=0$. We assume  $\mathcal {R} \gtrsim 0.1$ in (5.12) so that we may approximate an additional numerical factor arising from the average of the first radial eigenfunction with unity. Dimensionally,
$\mathcal {R} \gtrsim 0.1$ in (5.12) so that we may approximate an additional numerical factor arising from the average of the first radial eigenfunction with unity. Dimensionally,  $t_M \sim \lambda _{11}^{-2} \ln [2\sqrt {2}/({\rm \pi} M)] r_o^2/\kappa _c$ and the mixing time is independent of depth
$t_M \sim \lambda _{11}^{-2} \ln [2\sqrt {2}/({\rm \pi} M)] r_o^2/\kappa _c$ and the mixing time is independent of depth  $h$, as the problem is essentially two-dimensional.
$h$, as the problem is essentially two-dimensional.
5.2.2. Taylor dispersion regime
Depth is important at intermediate values of  ${Pe}$, where vertical and radial shear enables rapid transverse diffusion in narrow channels. A centre-manifold reduction (Mercer & Roberts Reference Mercer and Roberts1994; Roberts Reference Roberts1996; Ding & McLaughlin Reference Ding and McLaughlin2022; Ding Reference Ding2024) of (5.8) yields the scaling law
${Pe}$, where vertical and radial shear enables rapid transverse diffusion in narrow channels. A centre-manifold reduction (Mercer & Roberts Reference Mercer and Roberts1994; Roberts Reference Roberts1996; Ding & McLaughlin Reference Ding and McLaughlin2022; Ding Reference Ding2024) of (5.8) yields the scaling law
 \begin{equation} t_M/T \sim \frac{(1+\mathcal{R})^2}{4\;\mathcal{C}_D}\ln\left(\frac{2\sqrt{2}}{{\rm \pi} M}\right){Pe}^{{-}1}. \end{equation}
\begin{equation} t_M/T \sim \frac{(1+\mathcal{R})^2}{4\;\mathcal{C}_D}\ln\left(\frac{2\sqrt{2}}{{\rm \pi} M}\right){Pe}^{{-}1}. \end{equation}
See Appendix B for the details of this derivation. This inverse Péclet number dependence, typical of Taylor dispersion (Taylor Reference Taylor1953), results from an effective diffusivity  $\kappa _e= \mathcal {C}_D ({Pe}/\mathcal {H})^{2}{\kappa _c}$ that actually increases with the vigour of advection (
$\kappa _e= \mathcal {C}_D ({Pe}/\mathcal {H})^{2}{\kappa _c}$ that actually increases with the vigour of advection ( ${Pe}$). The dispersion coefficient
${Pe}$). The dispersion coefficient  $\mathcal {C}_D$ is given by
$\mathcal {C}_D$ is given by
 \begin{equation} \mathcal{C}_D ={-}\frac{(1+\mathcal{R})^2}{2}\langle{(\omega-\langle {\omega} \rangle)a_1}\rangle, \quad \langle {\cdot} \rangle =\frac{2}{1-\mathcal{R}^2}\int_0^1 \int_{\mathcal{R}}^1 ({\cdot}) \rho \,\mathrm{d}\rho\,\mathrm{d}\zeta, \end{equation}
\begin{equation} \mathcal{C}_D ={-}\frac{(1+\mathcal{R})^2}{2}\langle{(\omega-\langle {\omega} \rangle)a_1}\rangle, \quad \langle {\cdot} \rangle =\frac{2}{1-\mathcal{R}^2}\int_0^1 \int_{\mathcal{R}}^1 ({\cdot}) \rho \,\mathrm{d}\rho\,\mathrm{d}\zeta, \end{equation}
where the function  $a_1(\rho,\zeta )$ is found by solving
$a_1(\rho,\zeta )$ is found by solving
 \begin{equation} {\nabla}^{2}_{\bot} a_1 = \frac{(1+\mathcal{R})^2}{2}(\omega-\langle {\omega} \rangle), \end{equation}
\begin{equation} {\nabla}^{2}_{\bot} a_1 = \frac{(1+\mathcal{R})^2}{2}(\omega-\langle {\omega} \rangle), \end{equation}subject to no-flux boundary conditions.
The transition between diffusion-dominated and Taylor dispersion regimes marks the onset of mixing enhancement, which occurs near the Péclet number  ${Pe}_0$ at which scalings (5.12) and (5.13) are equal:
${Pe}_0$ at which scalings (5.12) and (5.13) are equal:
 \begin{equation} {Pe}_0 \sim \frac{\lambda_{11}\mathcal{H}(1+\mathcal{R})}{2\;\sqrt{\mathcal{C}_D}}. \end{equation}
\begin{equation} {Pe}_0 \sim \frac{\lambda_{11}\mathcal{H}(1+\mathcal{R})}{2\;\sqrt{\mathcal{C}_D}}. \end{equation}5.2.3. Advection-dominated regime
At much higher values of  ${Pe}$, advection occurs rapidly enough to shear the tracer concentration front into radially and vertically interleaved lamellae. Accordingly, we transform (5.8) into the Lagrangian frame following the flow. For
${Pe}$, advection occurs rapidly enough to shear the tracer concentration front into radially and vertically interleaved lamellae. Accordingly, we transform (5.8) into the Lagrangian frame following the flow. For  ${Pe} \gg 1$, we recover the advection-dominated scaling
${Pe} \gg 1$, we recover the advection-dominated scaling
 \begin{equation} \tau_M \sim F^{{-}1}\left(\frac{{\rm \pi} M}{2\sqrt{2}}\right){Pe}^{1/3}, \end{equation}
\begin{equation} \tau_M \sim F^{{-}1}\left(\frac{{\rm \pi} M}{2\sqrt{2}}\right){Pe}^{1/3}, \end{equation}which contains the one third dependence on Péclet number found in vortex flows (Rhines & Young Reference Rhines and Young1983; Flohr & Vassilicos Reference Flohr and Vassilicos1997). The function
 \begin{equation} F(x)=\left\Vert e^{-\frac{1}{3}(1+\mathcal{R})^2\left({\boldsymbol{\nabla}}_\bot\omega \,\boldsymbol{\cdot}\, {\boldsymbol{\nabla}}_\bot\omega\right) x^3}\right\Vert, \quad \text{where}\ {\boldsymbol{\nabla}}_\bot({\cdot}) = \left[\boldsymbol{e_r}\mathcal{H}\partial_{\rho} + \boldsymbol{e_z}\partial_{\zeta}\right]({\cdot}), \end{equation}
\begin{equation} F(x)=\left\Vert e^{-\frac{1}{3}(1+\mathcal{R})^2\left({\boldsymbol{\nabla}}_\bot\omega \,\boldsymbol{\cdot}\, {\boldsymbol{\nabla}}_\bot\omega\right) x^3}\right\Vert, \quad \text{where}\ {\boldsymbol{\nabla}}_\bot({\cdot}) = \left[\boldsymbol{e_r}\mathcal{H}\partial_{\rho} + \boldsymbol{e_z}\partial_{\zeta}\right]({\cdot}), \end{equation}
captures the effect of shear ( ${\boldsymbol {\nabla }}_\bot \omega$) on advection-dominated mixing. (For details of the derivation, see Appendix B.)
${\boldsymbol {\nabla }}_\bot \omega$) on advection-dominated mixing. (For details of the derivation, see Appendix B.)
A Mathematica notebook, available at https://github.com/cysdavid/magnetoStokes, implements all three scaling laws (5.12), (5.13), (5.17) as a tool for practitioners, inverting (5.18) numerically and solving (5.15) with finite elements.
5.2.4. Comparison with 3-D DNS
We compare the asymptotic scaling predictions above with 3-D DNS of (5.8), (5.10) over five orders of magnitude in  ${Pe}$. Three surveys in shallow, transitional and deep magneto-Stokes regimes (
${Pe}$. Three surveys in shallow, transitional and deep magneto-Stokes regimes ( $\varGamma = 0.12,0.85,6$) are explored for a channel with
$\varGamma = 0.12,0.85,6$) are explored for a channel with  $\mathcal {R}=0.9$; an additional survey with
$\mathcal {R}=0.9$; an additional survey with  $\mathcal {R}=0.5$ and
$\mathcal {R}=0.5$ and  $\varGamma = 0.12$ is included for comparison. All four surveys are indicated with open markers on the regime map in figure 3(a) (colour scheme is maintained between figures 3, 7, 8), and the three
$\varGamma = 0.12$ is included for comparison. All four surveys are indicated with open markers on the regime map in figure 3(a) (colour scheme is maintained between figures 3, 7, 8), and the three  $\mathcal {R}=0.9$ flow profiles are plotted in figure 3(b,c). The details of the numerical method are included in Appendix C.
$\mathcal {R}=0.9$ flow profiles are plotted in figure 3(b,c). The details of the numerical method are included in Appendix C.

Figure 7. Mixing time  $t_M$ vs Péclet number
$t_M$ vs Péclet number  ${Pe}$ for four DNS surveys in different channel geometries (
${Pe}$ for four DNS surveys in different channel geometries ( $\mathcal {R}, \varGamma$). Results for mixing levels
$\mathcal {R}, \varGamma$). Results for mixing levels  $M=0.5, 0.3, 0.15$ are indicated with darker to lighter tones. For each
$M=0.5, 0.3, 0.15$ are indicated with darker to lighter tones. For each  $M$, solid lines in the corresponding shade indicate predicted scaling exponents and coefficients using (5.12), (5.13), (5.17). The Taylor dispersion prediction (5.13) is omitted in panels (c,d), although the predicted onset of mixing enhancement
$M$, solid lines in the corresponding shade indicate predicted scaling exponents and coefficients using (5.12), (5.13), (5.17). The Taylor dispersion prediction (5.13) is omitted in panels (c,d), although the predicted onset of mixing enhancement  ${Pe}_0$ (5.16) is plotted as a vertical dashed line for all four surveys.
${Pe}_0$ (5.16) is plotted as a vertical dashed line for all four surveys.

Figure 8. (a) The DNS results and asymptotic predictions for all four surveys rescaled using  $T_{circ}$ to show the effects of flow morphology (rather than flow magnitude) on mixing enhancement. Predicted scalings are extrapolated to the highest value of
$T_{circ}$ to show the effects of flow morphology (rather than flow magnitude) on mixing enhancement. Predicted scalings are extrapolated to the highest value of  ${Pe}_{circ}$ investigated. (b) Mixing enhancement from a practical standpoint. The data and predictions in the previous panel are rescaled such that the fluid properties and channel radius
${Pe}_{circ}$ investigated. (b) Mixing enhancement from a practical standpoint. The data and predictions in the previous panel are rescaled such that the fluid properties and channel radius  $r_o$ may be regarded as fixed while the electromagnetic forcing
$r_o$ may be regarded as fixed while the electromagnetic forcing  $B_0 I_0$ is varied. Predicted scalings are extrapolated to the highest value of
$B_0 I_0$ is varied. Predicted scalings are extrapolated to the highest value of  $\widetilde {Pe}$ investigated. (c) Asymptotic predictions for the onset of mixing enhancement
$\widetilde {Pe}$ investigated. (c) Asymptotic predictions for the onset of mixing enhancement  $\widetilde {Pe}_0$ (using (5.16), (5.21)) as a function of depth-to-gap-width ratio
$\widetilde {Pe}_0$ (using (5.16), (5.21)) as a function of depth-to-gap-width ratio  $\varGamma$ at different values of
$\varGamma$ at different values of  $\mathcal {R}$ (contour labels). Coloured points correspond to vertical dashed lines in the previous panel.
$\mathcal {R}$ (contour labels). Coloured points correspond to vertical dashed lines in the previous panel.
Figure 7 plots the dimensionless mixing times  $t_M/T$ corresponding to
$t_M/T$ corresponding to  $M = 0.5, 0.3, 0.15$ against
$M = 0.5, 0.3, 0.15$ against  ${Pe}$ for each DNS survey (points). The asymptotic scaling laws (5.12), (5.13), (5.17) are plotted as solid lines for each value of
${Pe}$ for each DNS survey (points). The asymptotic scaling laws (5.12), (5.13), (5.17) are plotted as solid lines for each value of  $M$ (both the exponent and coefficient are predicted for these curves). The data in all four surveys follow diffusive and advection-dominated scalings. Taylor dispersion following (5.13) only appears in the shallow (
$M$ (both the exponent and coefficient are predicted for these curves). The data in all four surveys follow diffusive and advection-dominated scalings. Taylor dispersion following (5.13) only appears in the shallow ( $\varGamma =0.12$) and transitional (
$\varGamma =0.12$) and transitional ( $\varGamma =0.85$) surveys in the narrow channel (
$\varGamma =0.85$) surveys in the narrow channel ( $\mathcal {R}=0.9$) (figure 7a,b). In the shallow (
$\mathcal {R}=0.9$) (figure 7a,b). In the shallow ( $\varGamma =0.12$) survey, we find a fourth regime characterised by weak dispersion located between
$\varGamma =0.12$) survey, we find a fourth regime characterised by weak dispersion located between  ${Pe}^{-1}$ and
${Pe}^{-1}$ and  ${Pe}^{1/3}$ regimes, that was not observed by Gleeson et al. (Reference Gleeson, Roche, West and Gelb2004) in
${Pe}^{1/3}$ regimes, that was not observed by Gleeson et al. (Reference Gleeson, Roche, West and Gelb2004) in  $\varGamma \to \infty$ flows. For the deeper and wider channels (figure 7c,d), behaviour at intermediate
$\varGamma \to \infty$ flows. For the deeper and wider channels (figure 7c,d), behaviour at intermediate  $\textit {Pe}$ is more complex (in the
$\textit {Pe}$ is more complex (in the  $\mathcal {R}=0.5$ survey, Taylor dispersion disappears entirely), and we do not plot (5.13) for these surveys. Nonetheless, the transition from diffusive mixing to intermediate-
$\mathcal {R}=0.5$ survey, Taylor dispersion disappears entirely), and we do not plot (5.13) for these surveys. Nonetheless, the transition from diffusive mixing to intermediate- ${Pe}$ behaviour is accurately predicted by
${Pe}$ behaviour is accurately predicted by  ${Pe}_0$ (5.16) in all four surveys (vertical dashed lines in figure 7).
${Pe}_0$ (5.16) in all four surveys (vertical dashed lines in figure 7).
All four surveys are compared in figure 8 (for  $M=0.3$) to elucidate the effects of channel geometry (
$M=0.3$) to elucidate the effects of channel geometry ( $\mathcal {R}, \varGamma$) on enhanced mixing. In figure 8(a), mixing times are scaled by the surface mid-gap circulation time,
$\mathcal {R}, \varGamma$) on enhanced mixing. In figure 8(a), mixing times are scaled by the surface mid-gap circulation time,
 \begin{equation} T_{circ} = {{\rm \pi}(r_i+r_o)}/{u_{\theta,{mid\text{-}gap}}}, \end{equation}
\begin{equation} T_{circ} = {{\rm \pi}(r_i+r_o)}/{u_{\theta,{mid\text{-}gap}}}, \end{equation}and the Péclet number is rescaled as
 \begin{equation} {Pe}_{circ} = \frac{u_{\theta,{mid\text{-}gap}}r_o^2}{U {\rm \pi}h^2} {Pe} =\frac{r_o^2/\kappa_c}{T_{circ}}. \end{equation}
\begin{equation} {Pe}_{circ} = \frac{u_{\theta,{mid\text{-}gap}}r_o^2}{U {\rm \pi}h^2} {Pe} =\frac{r_o^2/\kappa_c}{T_{circ}}. \end{equation}This rescaling is equivalent to considering the circulation time and outer radius to be equal for all surveys, and allowing only the height, inner radius and diffusivity to vary; this isolates the effect of the flow's morphology (e.g. the size of boundary layers) from its magnitude.
Focusing on the  $\mathcal {R}=0.9$ surveys (pink, purple and teal points), we observe two trends in figure 8(a) as depth-to-gap-width ratio
$\mathcal {R}=0.9$ surveys (pink, purple and teal points), we observe two trends in figure 8(a) as depth-to-gap-width ratio  $\varGamma$ is decreased: (i) the onset of mixing enhancement is delayed (
$\varGamma$ is decreased: (i) the onset of mixing enhancement is delayed ( ${Pe}_{{circ},0}$ increases; the dashed teal line lies to the right of the dashed pink line), and (ii) mixing efficiency in the advection-dominated regime increases (
${Pe}_{{circ},0}$ increases; the dashed teal line lies to the right of the dashed pink line), and (ii) mixing efficiency in the advection-dominated regime increases ( $t_M/T_{circ}$ decreases; the solid teal line lies below the solid pink line on the right side of 8a). The onset of mixing enhancement
$t_M/T_{circ}$ decreases; the solid teal line lies below the solid pink line on the right side of 8a). The onset of mixing enhancement  ${Pe}_0$ is controlled by Taylor dispersion, which depends strongly on shear in the radial direction. Thus, as
${Pe}_0$ is controlled by Taylor dispersion, which depends strongly on shear in the radial direction. Thus, as  $\varGamma$ is decreased, the sidewall boundary layers shrink (2.23a,b), Taylor dispersion is reduced and diffusion-dominated mixing persists to higher
$\varGamma$ is decreased, the sidewall boundary layers shrink (2.23a,b), Taylor dispersion is reduced and diffusion-dominated mixing persists to higher  ${Pe}$. Mixing in the advection-dominated regime occurs via diffusion across lamellar structures in the tracer concentration field, which become vertically interleaved in flows dominated by vertical shear (large basal boundary layers). As
${Pe}$. Mixing in the advection-dominated regime occurs via diffusion across lamellar structures in the tracer concentration field, which become vertically interleaved in flows dominated by vertical shear (large basal boundary layers). As  $\varGamma$ is decreased, the basal boundary layer grows (2.28), the tracer concentration front is vertically sheared into a spiralling interface, and
$\varGamma$ is decreased, the basal boundary layer grows (2.28), the tracer concentration front is vertically sheared into a spiralling interface, and  $t_M/T_{circ}$ decreases. Finally, we observe that the onset of mixing enhancement occurs earlier in the wider channel
$t_M/T_{circ}$ decreases. Finally, we observe that the onset of mixing enhancement occurs earlier in the wider channel  $\mathcal {R} = 0.5$ (chartreuse points) than in the narrow channel with the same depth-to-gap-width ratio (pink points). The same trends in figure 8(a) are present for
$\mathcal {R} = 0.5$ (chartreuse points) than in the narrow channel with the same depth-to-gap-width ratio (pink points). The same trends in figure 8(a) are present for  $M=0.15$ and
$M=0.15$ and  $M=0.5$.
$M=0.5$.
The effects of flow morphology alone would seem to advocate for the use of deeper channels, since the onset of mixing enhancement occurs sooner (holding  $T_{circ}$ constant). However, achieving flow speeds in deep channels that are comparable to those in shallow channels is difficult in practice, as stronger magnetic fields or applied currents are required to counteract the drop in current density with depth. Thus, a practical representation of our mixing results requires one to combine the influence of flow morphology on mixing (figure 8a) with the influence of depth-to-gap-width ratio on flow magnitude (figure 2).
$T_{circ}$ constant). However, achieving flow speeds in deep channels that are comparable to those in shallow channels is difficult in practice, as stronger magnetic fields or applied currents are required to counteract the drop in current density with depth. Thus, a practical representation of our mixing results requires one to combine the influence of flow morphology on mixing (figure 8a) with the influence of depth-to-gap-width ratio on flow magnitude (figure 2).
To this end, figure 8(b) plots mixing times scaled by the diffusive time scale  $r_o^2/\kappa _c$ vs the Péclet number rescaled as
$r_o^2/\kappa _c$ vs the Péclet number rescaled as
 \begin{equation} \widetilde{Pe} = \frac{2 {\rm \pi}(1+\mathcal{R})^2}{\mathcal{H}^3}{Pe} = \frac{B_0 I_0}{\varrho \nu \kappa_c/r_o}. \end{equation}
\begin{equation} \widetilde{Pe} = \frac{2 {\rm \pi}(1+\mathcal{R})^2}{\mathcal{H}^3}{Pe} = \frac{B_0 I_0}{\varrho \nu \kappa_c/r_o}. \end{equation}
This rescaling allows us to observe the change in mixing time vs  $\varGamma$,
$\varGamma$,  $\mathcal {R}$, and the electromagnetic forcing (
$\mathcal {R}$, and the electromagnetic forcing ( $B_0 I_0$) for a chosen solution (constant
$B_0 I_0$) for a chosen solution (constant  $\varrho$,
$\varrho$,  $\nu$,
$\nu$,  $\kappa _c$) and fixed outer radius (
$\kappa _c$) and fixed outer radius ( $r_o$). In the advection-dominated limit, the shallowest channels still induce the fastest mixing; in the lower right portion of figure 8(b), the extrapolated mixing time prediction decreases by more than fivefold between the survey with
$r_o$). In the advection-dominated limit, the shallowest channels still induce the fastest mixing; in the lower right portion of figure 8(b), the extrapolated mixing time prediction decreases by more than fivefold between the survey with  $\varGamma = 0.6$,
$\varGamma = 0.6$,  $\mathcal {R} = 0.9$ (solid pink line) and the survey with
$\mathcal {R} = 0.9$ (solid pink line) and the survey with  $\varGamma = 0.12$,
$\varGamma = 0.12$,  $\mathcal {R} = 0.9$ (solid teal line). However, the enhancement of mixing is initiated with the least effort (smallest
$\mathcal {R} = 0.9$ (solid teal line). However, the enhancement of mixing is initiated with the least effort (smallest  $B_0 I_0$) for the transitional flow (
$B_0 I_0$) for the transitional flow ( $\varGamma = 0.85$; purple dashed line), out of the three
$\varGamma = 0.85$; purple dashed line), out of the three  $\mathcal {R}=0.9$ surveys (pink, purple and teal dashed lines).
$\mathcal {R}=0.9$ surveys (pink, purple and teal dashed lines).
Figure 8(c) plots the predicted onset value  $\widetilde {Pe}_0$ as a function of
$\widetilde {Pe}_0$ as a function of  $\varGamma$ for different values of
$\varGamma$ for different values of  $\mathcal {R}$. This shows that the transitional flow (purple point) in fact lies at a minimum in
$\mathcal {R}$. This shows that the transitional flow (purple point) in fact lies at a minimum in  $\widetilde {Pe}_0$ for
$\widetilde {Pe}_0$ for  $\mathcal {R} = 0.9$. These optima, located between
$\mathcal {R} = 0.9$. These optima, located between  $\varGamma = 0.66$ for
$\varGamma = 0.66$ for  $\mathcal {R} = 0.5$ and
$\mathcal {R} = 0.5$ and  $\varGamma =0.85$ for
$\varGamma =0.85$ for  $\mathcal {R} = 0.9$, result from the competing effects of sidewall boundary layer size and flow speed as
$\mathcal {R} = 0.9$, result from the competing effects of sidewall boundary layer size and flow speed as  $\varGamma$ is varied and the electromagnetic parameters are kept constant. Thus, magneto-Stokes annuli with near-unity depth-to-gap-width ratios enhance mixing for the least electromagnetic forcing.
$\varGamma$ is varied and the electromagnetic parameters are kept constant. Thus, magneto-Stokes annuli with near-unity depth-to-gap-width ratios enhance mixing for the least electromagnetic forcing.
Specific mixing applications include DNA hybridisation assays (e.g. Heule & Manz Reference Heule and Manz2004), which are hindered by the extremely low chemical diffusivities typical of macromolecules in aqueous solutions (Gregory et al. Reference Gregory, Cheng, Tang, Mao and Tse2016). For example, it takes more than 5 days ( $r_o^2/\kappa _c$) for 20-bp DNA fragments (
$r_o^2/\kappa _c$) for 20-bp DNA fragments ( $\kappa _c = 5.7\times 10^{-11}\ {\rm m}^2\ {\rm s}^{-1}$; Lukacs et al. Reference Lukacs, Haggie, Seksek, Lechardeur, Freedman and Verkman2000) to diffuse through a microfabricated annulus with
$\kappa _c = 5.7\times 10^{-11}\ {\rm m}^2\ {\rm s}^{-1}$; Lukacs et al. Reference Lukacs, Haggie, Seksek, Lechardeur, Freedman and Verkman2000) to diffuse through a microfabricated annulus with  $r_o = 5$ mm,
$r_o = 5$ mm,  $r_i = 4$ mm and
$r_i = 4$ mm and  $h = 425\ \mathrm {\mu }{\rm m}$ (cf. West et al. Reference West, Gleeson, Alderman, Collins and Berney2003). In contrast, applying a modest electromagnetic forcing (
$h = 425\ \mathrm {\mu }{\rm m}$ (cf. West et al. Reference West, Gleeson, Alderman, Collins and Berney2003). In contrast, applying a modest electromagnetic forcing ( $I_0 = 0.1\ {\rm A}, B_0 = 25$ mT) to this system results in advection-dominated mixing (
$I_0 = 0.1\ {\rm A}, B_0 = 25$ mT) to this system results in advection-dominated mixing ( $\widetilde {Pe} = 2.2 \times 10^8$) with predicted mixing time
$\widetilde {Pe} = 2.2 \times 10^8$) with predicted mixing time  $t_{M=0.3} = 14$ s.
$t_{M=0.3} = 14$ s.
Actual mixing times may be further reduced by the effects of surface tension. Deflection of the free surface at inner and outer menisci may locally reduce current density, thus enlarging the sidewall boundary layers and augmenting Taylor dispersion. Although potentially useful, these complications may be avoided by placing a no-slip upper boundary at  $z = 2 h$. If the total current is doubled (
$z = 2 h$. If the total current is doubled ( $I= 2 I_0$), then the equations for momentum (2.10) and advection–diffusion (5.8), (5.10) are unchanged, and their solutions are simply extensions of the free-surface solutions mirrored across the
$I= 2 I_0$), then the equations for momentum (2.10) and advection–diffusion (5.8), (5.10) are unchanged, and their solutions are simply extensions of the free-surface solutions mirrored across the  $z = h$ plane. Thus, the asymptotic mixing time predictions (5.12), (5.13), (5.17) for the free-surface system also apply to a closed system with half-height
$z = h$ plane. Thus, the asymptotic mixing time predictions (5.12), (5.13), (5.17) for the free-surface system also apply to a closed system with half-height  $h$ and half-current
$h$ and half-current  $I_0$.
$I_0$.
6. Discussion
In this study, we provide the first fully analytical solution for a fundamental MHD flow: magneto-Stokes flow in a cylindrical annulus. Three flow regimes (shallow-layer, transitional and deep-layer) are distinguished based on a single geometric parameter: the depth-to-gap-width ratio  $\varGamma$.
$\varGamma$.
We characterise the effect of  $\varGamma$ on the homogenisation of a diffusing tracer, relevant to the design of microscale mixing devices (West et al. Reference West, Gleeson, Alderman, Collins and Berney2003; Gleeson et al. Reference Gleeson, Roche, West and Gelb2004). Mixing in infinitesimally thin layers (
$\varGamma$ on the homogenisation of a diffusing tracer, relevant to the design of microscale mixing devices (West et al. Reference West, Gleeson, Alderman, Collins and Berney2003; Gleeson et al. Reference Gleeson, Roche, West and Gelb2004). Mixing in infinitesimally thin layers ( $\varGamma \to 0$) proceeds without the benefit of axial vorticity. In fact, we show that the shallow-layer asymptotic solution belongs to a class of MHD potential flows. These findings have already generated interest in analytical solutions for magneto-Stokes flow in other multiply connected channels of vanishing depth (McKee Reference McKee2024).
$\varGamma \to 0$) proceeds without the benefit of axial vorticity. In fact, we show that the shallow-layer asymptotic solution belongs to a class of MHD potential flows. These findings have already generated interest in analytical solutions for magneto-Stokes flow in other multiply connected channels of vanishing depth (McKee Reference McKee2024).
In finite-depth channels, mixing efficiency depends strongly on the value of  $\varGamma$. Using asymptotic reductions of the advection–diffusion equation validated with 3-D DNS, we show that
$\varGamma$. Using asymptotic reductions of the advection–diffusion equation validated with 3-D DNS, we show that  $\varGamma \approx 1$ annuli are optimal for initiating mixing enhancement with the least electromagnetic effort (
$\varGamma \approx 1$ annuli are optimal for initiating mixing enhancement with the least electromagnetic effort ( $B_0 I_0$). If the magnitude of
$B_0 I_0$). If the magnitude of  $B_0 I_0$ is not a constraint, then the shortest mixing times may be achieved via strongly forced, advection-dominated mixing in shallow channels (
$B_0 I_0$ is not a constraint, then the shortest mixing times may be achieved via strongly forced, advection-dominated mixing in shallow channels ( $\varGamma \ll 1$).
$\varGamma \ll 1$).
The extensive characterisation of both momentum and tracer evolution provided here makes the annular magneto-Stokes system an excellent MHD reference flow. Among other applications, its promise as a calibration tool for particle-tracking velocimetry (e.g. Valenzuela-Delgado et al. Reference Valenzuela-Delgado, Flores-Fuentes, Rivas-López, Sergiyenko, Lindner, Hernández-Balbuena and Rodríguez-Quiñonez2018a) and particle image velocimetry draws on the simplicity of the device and robustness of the analytical solution.
Supplementary data
A supplementary Python package and accompanying Jupyter notebook that implement our theoretical predictions are available at https://github.com/cysdavid/magnetoStokes.
Acknowledgements
The authors thank E. Gomis and A. Chlarson for their early laboratory work on the magneto-Stokes annulus. C.S.D. thanks E. Zhao for her expertise in image-processing methods, which greatly improved the phase-boundary-tracking code used in this study. The authors are grateful to L. Ding for his advice on the centre-manifold approach to modelling Taylor dispersion.
Funding
This research was supported by the National Science Foundation (EAR 1620649, EAR 1853196).
Declaration of interests
The authors report no conflict of interest.
Data availability statement
The laboratory and DNS data that support our findings are openly available at https://doi.org/10.5281/zenodo.12362602. Additionally, our dye-tracking velocimetry program and DNS codes may be freely accessed at https://github.com/cysdavid/magnetoStokes. A Mathematica notebook that reproduces our analytical solution is also included in this Github repository.
Author contributions
C.S.D. developed the model, found the solution presented here and derived the asymptotic predictions for mixing time. E.W.H. wrote the DNS codes for both the axisymmetric 2-D standard cases and the 3-D mixing cases; C.S.D. ran these codes. C.S.D. and Y.X. carried out laboratory experiments, with Y.X. providing key insights into flow visualisation. J.M.A. conceived the idea for this study and guided its development. C.S.D. prepared all drafts of this manuscript, and all authors contributed to the final version.
Appendix A. Full axisymmetric equations and solution
The 3-D axisymmetric equations under the non-dimensionalisation in §2.1 are
 $$\begin{gather}Re \left\{\partial_{\tau}\upsilon_\rho+(\mathcal{R} +1) \left[\frac{1}{\mathcal{H}}(\boldsymbol{\upsilon}_\bot\boldsymbol{\cdot}{\boldsymbol{\nabla}}_\bot)\upsilon_\rho-\frac{\upsilon_{\theta }^2}{\rho}+\partial_{\rho}\varPi\right]\right\}={\nabla}^{2}_{\bot} \upsilon_\rho - \mathcal{H}^2\frac{\upsilon_\rho}{\rho^2}, \end{gather}$$
$$\begin{gather}Re \left\{\partial_{\tau}\upsilon_\rho+(\mathcal{R} +1) \left[\frac{1}{\mathcal{H}}(\boldsymbol{\upsilon}_\bot\boldsymbol{\cdot}{\boldsymbol{\nabla}}_\bot)\upsilon_\rho-\frac{\upsilon_{\theta }^2}{\rho}+\partial_{\rho}\varPi\right]\right\}={\nabla}^{2}_{\bot} \upsilon_\rho - \mathcal{H}^2\frac{\upsilon_\rho}{\rho^2}, \end{gather}$$ $$\begin{gather}Re \left\{\partial_{\tau}\upsilon_{\theta }+(\mathcal{R} +1) \left[\frac{1}{\mathcal{H}}(\boldsymbol{\upsilon}_\bot\boldsymbol{\cdot}{\boldsymbol{\nabla}}_\bot)\upsilon_\theta+\frac{\upsilon_\rho \upsilon_{\theta }}{\rho}\right]\right\}={\nabla}^{2}_{\bot} \upsilon_\theta - \mathcal{H}^2\frac{\upsilon_\theta}{\rho^2} +\frac{\mathcal{R} +1}{\rho}\varUpsilon(\tau), \end{gather}$$
$$\begin{gather}Re \left\{\partial_{\tau}\upsilon_{\theta }+(\mathcal{R} +1) \left[\frac{1}{\mathcal{H}}(\boldsymbol{\upsilon}_\bot\boldsymbol{\cdot}{\boldsymbol{\nabla}}_\bot)\upsilon_\theta+\frac{\upsilon_\rho \upsilon_{\theta }}{\rho}\right]\right\}={\nabla}^{2}_{\bot} \upsilon_\theta - \mathcal{H}^2\frac{\upsilon_\theta}{\rho^2} +\frac{\mathcal{R} +1}{\rho}\varUpsilon(\tau), \end{gather}$$ $$\begin{gather}Re \left\{\partial_{\tau}\upsilon_\zeta+({\mathcal{R} +1})\left[\frac{1}{\mathcal{H}}(\boldsymbol{\upsilon}_\bot\boldsymbol{\cdot}{\boldsymbol{\nabla}}_\bot)\upsilon_\zeta +\frac{1}{\mathcal{H}^2}{\partial_{\zeta}\varPi}\right]\right\}={\nabla}^{2}_{\bot} \upsilon_\zeta, \end{gather}$$
$$\begin{gather}Re \left\{\partial_{\tau}\upsilon_\zeta+({\mathcal{R} +1})\left[\frac{1}{\mathcal{H}}(\boldsymbol{\upsilon}_\bot\boldsymbol{\cdot}{\boldsymbol{\nabla}}_\bot)\upsilon_\zeta +\frac{1}{\mathcal{H}^2}{\partial_{\zeta}\varPi}\right]\right\}={\nabla}^{2}_{\bot} \upsilon_\zeta, \end{gather}$$ \begin{equation} \partial_{\rho}(\rho\upsilon_\rho) + {\rho}\partial_{\zeta}\upsilon_\zeta =0, \end{equation}
\begin{equation} \partial_{\rho}(\rho\upsilon_\rho) + {\rho}\partial_{\zeta}\upsilon_\zeta =0, \end{equation}
where we define  $\boldsymbol {\upsilon }_\bot = \upsilon _\rho \boldsymbol {e_r} + \mathcal {H}\upsilon _\zeta \boldsymbol {e_z}$,
$\boldsymbol {\upsilon }_\bot = \upsilon _\rho \boldsymbol {e_r} + \mathcal {H}\upsilon _\zeta \boldsymbol {e_z}$,  ${\boldsymbol {\nabla }}_\bot ({\cdot })= [\boldsymbol {e_r}\mathcal {H}\partial _{\rho } + \boldsymbol {e_z}\partial _{\zeta }]({\cdot })$, and
${\boldsymbol {\nabla }}_\bot ({\cdot })= [\boldsymbol {e_r}\mathcal {H}\partial _{\rho } + \boldsymbol {e_z}\partial _{\zeta }]({\cdot })$, and  ${\nabla }^{2}_{\bot }({\cdot }) = [\mathcal {H}^2 {\rho }^{-1} \partial _{\rho }{\rho }\partial _{\rho } + \partial _{\zeta }^2]({\cdot })$. For vanishing meridional flow
${\nabla }^{2}_{\bot }({\cdot }) = [\mathcal {H}^2 {\rho }^{-1} \partial _{\rho }{\rho }\partial _{\rho } + \partial _{\zeta }^2]({\cdot })$. For vanishing meridional flow  $\boldsymbol {\upsilon }_\bot$, (A1) reduces to (2.10).
$\boldsymbol {\upsilon }_\bot$, (A1) reduces to (2.10).
In § 2.1, we provide an expression for  $\upsilon _\theta$ found by approximating the full solution to (2.10)
$\upsilon _\theta$ found by approximating the full solution to (2.10)
 \begin{align} \upsilon_\theta(\rho,\zeta,\tau) & = \sum_{n=1}^{\infty} \left\{\frac{2(\mathcal{R}+1)}{k_n^2 \mathcal{H}} \left[ \frac{\mathcal{H}}{k_n \rho}-A_n {\rm{I}}_1\left( \frac{k_n}{ \mathcal{H}}\rho\right) - B_n {\rm{K}}_1\left( \frac{k_n}{ \mathcal{H}}\rho\right) \right]\right.\nonumber\\ &\quad\left. +\sum_{m=1}^{\infty}C_{mn}\left(\frac{{\rm{J}}_ 1\left(\mu_m \rho\right)}{{\rm{J}}_1(\mu_m)}- \frac{{\rm{Y}}_1\left(\mu_m \rho \right)}{{\rm{Y}}_ 1(\mu_m )}\right) \exp\left({-\frac{\mathcal{H} ^2 \mu_m ^2+k_n^2}{Re}\tau }\right)\right\}\sin \left(k_n\zeta\right), \end{align}
\begin{align} \upsilon_\theta(\rho,\zeta,\tau) & = \sum_{n=1}^{\infty} \left\{\frac{2(\mathcal{R}+1)}{k_n^2 \mathcal{H}} \left[ \frac{\mathcal{H}}{k_n \rho}-A_n {\rm{I}}_1\left( \frac{k_n}{ \mathcal{H}}\rho\right) - B_n {\rm{K}}_1\left( \frac{k_n}{ \mathcal{H}}\rho\right) \right]\right.\nonumber\\ &\quad\left. +\sum_{m=1}^{\infty}C_{mn}\left(\frac{{\rm{J}}_ 1\left(\mu_m \rho\right)}{{\rm{J}}_1(\mu_m)}- \frac{{\rm{Y}}_1\left(\mu_m \rho \right)}{{\rm{Y}}_ 1(\mu_m )}\right) \exp\left({-\frac{\mathcal{H} ^2 \mu_m ^2+k_n^2}{Re}\tau }\right)\right\}\sin \left(k_n\zeta\right), \end{align}
where  ${\rm {J}}_1$ and
${\rm {J}}_1$ and  ${\rm {Y}}_1$ are first-order Bessel functions of first and second kind and each eigenvalue
${\rm {Y}}_1$ are first-order Bessel functions of first and second kind and each eigenvalue  $\mu _m$ is the
$\mu _m$ is the  $m$th smallest positive root of
$m$th smallest positive root of
 \begin{equation} {\rm{Y}}_1(\mu ) {\rm{J}}_1(\mu \mathcal{R} )-{\rm{J}}_1(\mu ) {\rm{Y}}_1(\mu \mathcal{R})=0. \end{equation}
\begin{equation} {\rm{Y}}_1(\mu ) {\rm{J}}_1(\mu \mathcal{R} )-{\rm{J}}_1(\mu ) {\rm{Y}}_1(\mu \mathcal{R})=0. \end{equation}Setting  $\mathcal {H} ^2 \mu _m ^2+k_n^2 \approx k_1^2$ in the exponential term above reduces (A3) to the approximate solution (2.15). The roots of (A4) and analytical expressions for coefficients
$\mathcal {H} ^2 \mu _m ^2+k_n^2 \approx k_1^2$ in the exponential term above reduces (A3) to the approximate solution (2.15). The roots of (A4) and analytical expressions for coefficients  $C_{m n}$ are provided in a Mathematica notebook available at https://github.com/cysdavid/magnetoStokes.
$C_{m n}$ are provided in a Mathematica notebook available at https://github.com/cysdavid/magnetoStokes.
Appendix B. Derivation of mixing time predictions
Derivation of both the diffusion-dominated (5.12) and advection-dominated (5.17) scaling laws is facilitated by transforming (5.8) into the Lagrangian reference frame ( $\rho,\tilde {\theta },\zeta$) according to
$\rho,\tilde {\theta },\zeta$) according to  $\theta = \tilde {\theta } + (1+\mathcal {R})\omega (\rho,\zeta ) \tau$. We assume that the mixing time scales with some power
$\theta = \tilde {\theta } + (1+\mathcal {R})\omega (\rho,\zeta ) \tau$. We assume that the mixing time scales with some power  $\alpha$ of the Péclet number, and we let
$\alpha$ of the Péclet number, and we let  $\tau = {Pe}^\alpha \tilde {\tau }$ so that (5.8) becomes
$\tau = {Pe}^\alpha \tilde {\tau }$ so that (5.8) becomes
 \begin{align} \partial_{\tilde{\tau}} c &= {Pe}^{\alpha-1}\left(\frac{\mathcal{H}^2} {\rho^{2}}\partial_{\tilde{\theta}}^2 + {\nabla}^{2}_{\bot} \right)c -{Pe}^{2\alpha-1}(1+\mathcal{R})\tilde{\tau}\left[{\nabla}^{2}_{\bot} \omega + 2({\boldsymbol{\nabla}}_\bot\omega \boldsymbol{\cdot} {\boldsymbol{\nabla}}_\bot)\right]\partial_{\tilde{\theta}}c \nonumber\\ &\quad + {Pe}^{3\alpha-1}(1+\mathcal{R})^2 \tilde{\tau}^2 \left( {\boldsymbol{\nabla}}_\bot\omega \boldsymbol{\cdot} {\boldsymbol{\nabla}}_\bot\omega\right) \partial_{\tilde{\theta}}^2 c. \end{align}
\begin{align} \partial_{\tilde{\tau}} c &= {Pe}^{\alpha-1}\left(\frac{\mathcal{H}^2} {\rho^{2}}\partial_{\tilde{\theta}}^2 + {\nabla}^{2}_{\bot} \right)c -{Pe}^{2\alpha-1}(1+\mathcal{R})\tilde{\tau}\left[{\nabla}^{2}_{\bot} \omega + 2({\boldsymbol{\nabla}}_\bot\omega \boldsymbol{\cdot} {\boldsymbol{\nabla}}_\bot)\right]\partial_{\tilde{\theta}}c \nonumber\\ &\quad + {Pe}^{3\alpha-1}(1+\mathcal{R})^2 \tilde{\tau}^2 \left( {\boldsymbol{\nabla}}_\bot\omega \boldsymbol{\cdot} {\boldsymbol{\nabla}}_\bot\omega\right) \partial_{\tilde{\theta}}^2 c. \end{align} In the limit  ${Pe} \to 0$, a dominant balance exists if
${Pe} \to 0$, a dominant balance exists if  $\alpha = 1$. This results in the classical diffusion equation, which yields (5.12) upon solution. On the other hand, two-term dominant balance in the limit
$\alpha = 1$. This results in the classical diffusion equation, which yields (5.12) upon solution. On the other hand, two-term dominant balance in the limit  ${Pe} \to \infty$ requires that
${Pe} \to \infty$ requires that  $\alpha = 1/3$, yielding a diffusion-like equation,
$\alpha = 1/3$, yielding a diffusion-like equation,
 \begin{equation} \partial_{\tilde{\tau}} c = (1+\mathcal{R})^2 \tilde{\tau}^2 \left( {\boldsymbol{\nabla}}_\bot\omega \boldsymbol{\cdot} {\boldsymbol{\nabla}}_\bot\omega\right) \partial_{\tilde{\theta}}^2 c, \end{equation}
\begin{equation} \partial_{\tilde{\tau}} c = (1+\mathcal{R})^2 \tilde{\tau}^2 \left( {\boldsymbol{\nabla}}_\bot\omega \boldsymbol{\cdot} {\boldsymbol{\nabla}}_\bot\omega\right) \partial_{\tilde{\theta}}^2 c, \end{equation}whose solution,
 \begin{equation} c(\rho,\tilde{\theta},\zeta,\tilde{\tau}) = \bar{c} + \sum_{m=1}^\infty C_m \sqrt{2} \cos{m \tilde{\theta}} \exp \left({-\frac{1}{3}(1+\mathcal{R})^2\left( {\boldsymbol{\nabla}}_\bot\omega \boldsymbol{\cdot} {\boldsymbol{\nabla}}_\bot\omega\right)m^2 \tilde{\tau}^3}\right), \end{equation}
\begin{equation} c(\rho,\tilde{\theta},\zeta,\tilde{\tau}) = \bar{c} + \sum_{m=1}^\infty C_m \sqrt{2} \cos{m \tilde{\theta}} \exp \left({-\frac{1}{3}(1+\mathcal{R})^2\left( {\boldsymbol{\nabla}}_\bot\omega \boldsymbol{\cdot} {\boldsymbol{\nabla}}_\bot\omega\right)m^2 \tilde{\tau}^3}\right), \end{equation}
depends on  $\rho$ and
$\rho$ and  $\zeta$ parametrically through the angular velocity
$\zeta$ parametrically through the angular velocity  $\omega$. The advection-dominated scaling law (5.17) follows from retaining only the fundamental (
$\omega$. The advection-dominated scaling law (5.17) follows from retaining only the fundamental ( $m=1$) mode in (B3).
$m=1$) mode in (B3).
The Taylor dispersion scaling prediction is derived using a separate procedure. We transform (5.8) according to  $\theta = \vartheta + (1+\mathcal {R})\langle {\omega } \rangle \tau$ into the frame (
$\theta = \vartheta + (1+\mathcal {R})\langle {\omega } \rangle \tau$ into the frame ( $\rho,\vartheta,\zeta$) rotating with the average angular velocity
$\rho,\vartheta,\zeta$) rotating with the average angular velocity  $\langle \omega \rangle$. In this frame, we assume that mixing smooths out the cross-sectional averaged tracer concentration field
$\langle \omega \rangle$. In this frame, we assume that mixing smooths out the cross-sectional averaged tracer concentration field  $\langle c \rangle$ such that
$\langle c \rangle$ such that
 \begin{equation} \langle c \rangle \gg \partial_\vartheta \langle c \rangle \gg \partial_\vartheta^2 \langle c \rangle \gg \partial_\vartheta^3 \langle c \rangle \gg\dots, \end{equation}
\begin{equation} \langle c \rangle \gg \partial_\vartheta \langle c \rangle \gg \partial_\vartheta^2 \langle c \rangle \gg \partial_\vartheta^3 \langle c \rangle \gg\dots, \end{equation}
as  $\tau \to \infty$. Given this ordering, we may effect a centre-manifold reduction (Mercer & Roberts Reference Mercer and Roberts1994; Roberts Reference Roberts1996; Ding & McLaughlin Reference Ding and McLaughlin2022) of the 3-D advection–diffusion equation by adopting an asymptotic expansion for
$\tau \to \infty$. Given this ordering, we may effect a centre-manifold reduction (Mercer & Roberts Reference Mercer and Roberts1994; Roberts Reference Roberts1996; Ding & McLaughlin Reference Ding and McLaughlin2022) of the 3-D advection–diffusion equation by adopting an asymptotic expansion for  $c$ similar to that of Ding (Reference Ding2024),
$c$ similar to that of Ding (Reference Ding2024),
 \begin{equation} c = \langle c \rangle + {Pe} \,a_1(\rho,\zeta)\frac{1}{\rho_0}\partial_\vartheta \langle c \rangle + {Pe}\,a_2(\rho,\zeta)\frac{1}{\rho_0^2}\partial_\vartheta^2 \langle c \rangle + O(\partial_\vartheta^3 \langle c \rangle), \end{equation}
\begin{equation} c = \langle c \rangle + {Pe} \,a_1(\rho,\zeta)\frac{1}{\rho_0}\partial_\vartheta \langle c \rangle + {Pe}\,a_2(\rho,\zeta)\frac{1}{\rho_0^2}\partial_\vartheta^2 \langle c \rangle + O(\partial_\vartheta^3 \langle c \rangle), \end{equation}
where  $\rho _0 = (1+\mathcal {R})/2$ is the mid-gap radius. The functions
$\rho _0 = (1+\mathcal {R})/2$ is the mid-gap radius. The functions  $a_1, a_2$ vanish upon cross-sectional averaging (
$a_1, a_2$ vanish upon cross-sectional averaging ( $\langle a_1 \rangle = \langle a_2 \rangle = 0$) and must satisfy the same no-flux boundary conditions as does
$\langle a_1 \rangle = \langle a_2 \rangle = 0$) and must satisfy the same no-flux boundary conditions as does  $c$ (such that
$c$ (such that  $\langle {\nabla }^{2}_{\bot }a_1 \rangle = \langle {\nabla }^{2}_{\bot }a_2 \rangle = 0$).
$\langle {\nabla }^{2}_{\bot }a_1 \rangle = \langle {\nabla }^{2}_{\bot }a_2 \rangle = 0$).
Substituting (B5) into the transformed advection–diffusion equation yields
 \begin{align} &\partial_\tau\left(\langle c \rangle + {Pe}\,\frac{a_1}{\rho_0}\partial_\vartheta \langle c \rangle + {Pe}\,\frac{a_2}{\rho_0^2}\partial_\vartheta^2 \langle c \rangle\right)+(1+\mathcal{R})(\omega-\langle {\omega} \rangle)\left(\partial_\vartheta \langle c \rangle+{Pe}\,\frac{a_1}{\rho_0}\partial_\vartheta^2 \langle c \rangle\right) \nonumber\\ &\quad = \frac{\partial_\vartheta \langle c \rangle}{\rho_0}{\nabla}^{2}_{\bot} a_1 + \frac{\partial_\vartheta^2 \langle c \rangle}{\rho_0^2}{\nabla}^{2}_{\bot} a_2 + O(\partial_\vartheta^3 \langle c \rangle), \end{align}
\begin{align} &\partial_\tau\left(\langle c \rangle + {Pe}\,\frac{a_1}{\rho_0}\partial_\vartheta \langle c \rangle + {Pe}\,\frac{a_2}{\rho_0^2}\partial_\vartheta^2 \langle c \rangle\right)+(1+\mathcal{R})(\omega-\langle {\omega} \rangle)\left(\partial_\vartheta \langle c \rangle+{Pe}\,\frac{a_1}{\rho_0}\partial_\vartheta^2 \langle c \rangle\right) \nonumber\\ &\quad = \frac{\partial_\vartheta \langle c \rangle}{\rho_0}{\nabla}^{2}_{\bot} a_1 + \frac{\partial_\vartheta^2 \langle c \rangle}{\rho_0^2}{\nabla}^{2}_{\bot} a_2 + O(\partial_\vartheta^3 \langle c \rangle), \end{align}
which, after cross-sectional averaging  $\langle {\cdot } \rangle$ and neglecting
$\langle {\cdot } \rangle$ and neglecting  $O(\partial _\vartheta ^3 \langle c \rangle )$ terms, leaves a 1-D diffusion equation for
$O(\partial _\vartheta ^3 \langle c \rangle )$ terms, leaves a 1-D diffusion equation for  $\langle c \rangle (\vartheta,\tau )$,
$\langle c \rangle (\vartheta,\tau )$,
 \begin{equation} \partial_\tau \langle c \rangle = \mathcal{C}_D \textit{Pe}\frac{1}{\rho_0^2}\partial_\vartheta^2\langle c \rangle, \end{equation}
\begin{equation} \partial_\tau \langle c \rangle = \mathcal{C}_D \textit{Pe}\frac{1}{\rho_0^2}\partial_\vartheta^2\langle c \rangle, \end{equation}
where  $\mathcal {C}_D$ depends on
$\mathcal {C}_D$ depends on  $\omega$ and
$\omega$ and  $a_1$ through (5.14a,b). To determine
$a_1$ through (5.14a,b). To determine  $a_1$ and obtain closure, we first observe from (B7) that
$a_1$ and obtain closure, we first observe from (B7) that  $\partial _\tau \langle c \rangle =O( \partial _\vartheta ^2 \langle c \rangle )$. Then, collecting
$\partial _\tau \langle c \rangle =O( \partial _\vartheta ^2 \langle c \rangle )$. Then, collecting  $O(\partial _\vartheta \langle c \rangle )$ terms in (B6) yields the Poisson equation (5.15), which may be solved for
$O(\partial _\vartheta \langle c \rangle )$ terms in (B6) yields the Poisson equation (5.15), which may be solved for  $a_1$. Finally, the advection-dominated scaling law (5.17) follows from solving (B7) and retaining only the
$a_1$. Finally, the advection-dominated scaling law (5.17) follows from solving (B7) and retaining only the  $m=1$ mode.
$m=1$ mode.
Appendix C. Numerical method for 3-D mixing DNS
The 3-D simulations of the advection–diffusion equation (5.8) were performed using the pseudospectral code Dedalus. The flow field  $u_\theta$ was computed using the first
$u_\theta$ was computed using the first  $\mathcal {N}$ vertical modes of the steady analytical flow solution (2.16), truncated such that the
$\mathcal {N}$ vertical modes of the steady analytical flow solution (2.16), truncated such that the  $\mathcal {N}+1$st mode changes the value of
$\mathcal {N}+1$st mode changes the value of  $u_{\theta,{mid\text {-}gap}}$ by <0.5 %. The tracer concentration
$u_{\theta,{mid\text {-}gap}}$ by <0.5 %. The tracer concentration  $c$ and velocity
$c$ and velocity  $u_\theta$ fields were discretised using Chebyshev modes in the
$u_\theta$ fields were discretised using Chebyshev modes in the  $\rho$,
$\rho$,  $\zeta$ directions and real Fourier modes in the
$\zeta$ directions and real Fourier modes in the  $\theta$ direction. The azimuthally discontinuous initial condition for
$\theta$ direction. The azimuthally discontinuous initial condition for  $c$ (5.10) was approximated by a smooth bump function to avoid Gibbs oscillations:
$c$ (5.10) was approximated by a smooth bump function to avoid Gibbs oscillations:
 \begin{equation} c_0(\rho,\theta) =
\begin{cases} 0, & \left(\dfrac{{\rm \pi} }{2} + \dfrac{\Delta
\theta}{2 \rho}\right)^2\leqslant (\theta -{\rm \pi} )^2
\\[10pt] S\left(\theta -{\rm \pi}; \dfrac{{\rm \pi}
}{2}-\dfrac{\Delta \theta}{2 \rho},\dfrac{\Delta
\theta}{\rho}\right), & \left(\dfrac{{\rm \pi}
}{2}-\dfrac{\Delta \theta}{2 \rho}\right)^2<(\theta -{\rm \pi}
)^2<\left(\dfrac{{\rm \pi} }{2}+\dfrac{\Delta \theta}{2
\rho}\right)^2 \\[10pt] 1, &\,(\theta -{\rm \pi} )^2\leqslant
\left(\dfrac{{\rm \pi} }{2}-\dfrac{\Delta \theta}{2
\rho}\right)^2 \end{cases},
\end{equation}
\begin{equation} c_0(\rho,\theta) =
\begin{cases} 0, & \left(\dfrac{{\rm \pi} }{2} + \dfrac{\Delta
\theta}{2 \rho}\right)^2\leqslant (\theta -{\rm \pi} )^2
\\[10pt] S\left(\theta -{\rm \pi}; \dfrac{{\rm \pi}
}{2}-\dfrac{\Delta \theta}{2 \rho},\dfrac{\Delta
\theta}{\rho}\right), & \left(\dfrac{{\rm \pi}
}{2}-\dfrac{\Delta \theta}{2 \rho}\right)^2<(\theta -{\rm \pi}
)^2<\left(\dfrac{{\rm \pi} }{2}+\dfrac{\Delta \theta}{2
\rho}\right)^2 \\[10pt] 1, &\,(\theta -{\rm \pi} )^2\leqslant
\left(\dfrac{{\rm \pi} }{2}-\dfrac{\Delta \theta}{2
\rho}\right)^2 \end{cases},
\end{equation}
where  $S$ is a transition function constructed following Tu (Reference Tu2011),
$S$ is a transition function constructed following Tu (Reference Tu2011),
 \begin{equation} S(x;w,\Delta w) = \left\{{1+\exp \left[\frac{\Delta w (\Delta w+2 w) \left(w^2+(\Delta w+w)^2-2 x^2\right)}{\left(x^2-w^2\right) \left(x^2-(\Delta w+w)^2\right)}\right]}\right\}^{{-}1}, \end{equation}
\begin{equation} S(x;w,\Delta w) = \left\{{1+\exp \left[\frac{\Delta w (\Delta w+2 w) \left(w^2+(\Delta w+w)^2-2 x^2\right)}{\left(x^2-w^2\right) \left(x^2-(\Delta w+w)^2\right)}\right]}\right\}^{{-}1}, \end{equation}
and the ramp width  $\Delta \theta$ is set to
$\Delta \theta$ is set to  $\Delta \theta = 2{\rm \pi} (12/256)$ across all cases.
$\Delta \theta = 2{\rm \pi} (12/256)$ across all cases.
For efficiency reasons, we used different timestepping schemes in cases dominated by diffusion vs those with stronger advection (see Ascher, Ruuth & Spiteri Reference Ascher, Ruuth and Spiteri1997). The empirically determined cutoff value  ${Pe}^*$ between these two groups roughly coincides with
${Pe}^*$ between these two groups roughly coincides with  ${Pe}_0$, the predicted transition between diffusion-dominated and Taylor dispersion mixing regimes. The strongly diffusive cases (
${Pe}_0$, the predicted transition between diffusion-dominated and Taylor dispersion mixing regimes. The strongly diffusive cases ( ${Pe} < {Pe}^*$) used the SBDF2 scheme (Wang & Ruuth Reference Wang and Ruuth2008), while the remainder (
${Pe} < {Pe}^*$) used the SBDF2 scheme (Wang & Ruuth Reference Wang and Ruuth2008), while the remainder ( ${Pe} \geqslant {Pe}^*$) used the four-stage, third-order implicit–explicit Runge–Kutta (RK443) scheme (Ascher et al. Reference Ascher, Ruuth and Spiteri1997, § 2.8) and twice the spatial resolution
${Pe} \geqslant {Pe}^*$) used the four-stage, third-order implicit–explicit Runge–Kutta (RK443) scheme (Ascher et al. Reference Ascher, Ruuth and Spiteri1997, § 2.8) and twice the spatial resolution  $(N_\rho, N_\theta,N_\zeta )$ of the diffusive cases. These values, in addition to
$(N_\rho, N_\theta,N_\zeta )$ of the diffusive cases. These values, in addition to  ${Pe}^*$,
${Pe}^*$,  $\mathcal {N}$ and the timestep
$\mathcal {N}$ and the timestep  $\Delta \tau$ for each survey are collected in table 5. The code used for these simulations is available online (https://github.com/cysdavid/magnetoStokes).
$\Delta \tau$ for each survey are collected in table 5. The code used for these simulations is available online (https://github.com/cysdavid/magnetoStokes).
Table 5. Numerical parameters used for the 3-D DNS discussed in § 5.2, including the threshold Péclet number  ${Pe}^*$ below which SBDF2 timestepping is used instead of RK443. Spatial resolution (
${Pe}^*$ below which SBDF2 timestepping is used instead of RK443. Spatial resolution ( $N_\rho, N_\theta, N_\zeta$) for cases with
$N_\rho, N_\theta, N_\zeta$) for cases with  ${Pe} < {Pe}^*$ is half that of the values shown here for each survey.
${Pe} < {Pe}^*$ is half that of the values shown here for each survey.






































































 Open access
Open access