




Impact Statement
The proposed work can strongly impact the automotive community in manifold ways: (i) the development of several automotive perception algorithms rely on the data from big annotated datasets, highlighting how errors in annotations can affect neural network performance, and which neural networks are more robust can inform future algorithm design and deployment; (ii) proposing some clear and enforceable criteria for annotation (applicable to any automotive datasets), with different levels of formality and enforceability, this work might promote a more uniform way of labeling in the automotive community.
We believe this work can have strong implications for neural network research, as well as on their deployment in industry, combined with the use of well-known automotive benchmarking datasets.
1. Introduction
With the recent advances in the field of artificial intelligence (AI) and machine learning (ML), deep neural networks (DNNs) are becoming commonly used in many fields, from agriculture to medical, from manufacturing to robotics (Dokic et al., Reference Dokic, Blaskovic and Mandusic2020; Retson et al., Reference Retson, Besser, Sall, Golden and Hsiao2019; Park et al., Reference Park, Park, Mo and Kim2021). Compared to traditional algorithms, ML algorithms can provide better flexibility to unforeseen and uncommon circumstances. This flexibility is critical for applications like assisted and automated driving (AAD) functions due to the high variability (of the environment and road stakeholders) that can be encountered during a vehicle journey. There are countless factors that can affect an AAD sense-perceive-plan-control pipeline, from the degradation of perception sensor data to unpredictable actor actions, and they can compromise the overall safety of the vehicle (Chen et al., Reference Chen, Liu and Pei2021).
1.1. AAD and DNNs
Assisted driving functions are currently deployed in commercial vehicles, and automated driving is a major research area in the vehicle industry and academia (Ingle & Phute, Reference Ingle and Phute2016; Kukkala et al., Reference Kukkala, Tunnell, Pasricha and Bradley2018; Li & Shi, Reference Li and Shi2022; Du, Reference Du2023). Functions are developed to reduce driver workload, thus improving safety and comfort. These functions can range from simple audiovisual warnings for the driver to systems taking partial or full control of the vehicle. The Society of Automotive Engineers (SAE) has published the J3016 standard, defining six levels of driving automation, from Levels 0 to 5 (SAE J3016_202104, 2021). As the level of automation increases, so does the amount of control and driving situations which the AAD function can handle. Due to the complexity and variability of the driving environment, researchers are increasingly turning to DNN-based functions for their flexibility and ability to handle previously unseen inputs (Koopman & Wagner, Reference Koopman and Wagner2016; Li & Ibanez-Guzman, Reference Li and Ibanez-Guzman2020; Cui et al., Reference Cui, Chen, Chu, Chen, Tian, Li and Cao2021).
There are many datasets collected for developing, testing, and benchmarking some of the perception and prediction functions used to support AAD tasks. They present annotated and labeled ground truth data appropriate to the different perception/prediction tasks (i.e. bounding boxes (BBs) for object detection, pixel masks for segmentation) (Guo et al., Reference Guo, Kurup and Shah2020). Commonly used and established benchmarking datasets are the KITTI (Geiger et al., Reference Geiger, Lenz and Urtasun2012), Berkeley DeepDrive (BDD) (Xu et al., Reference Xu, Gao, Yu and Darrell2017), nuScene, (Caesar et al., Reference Caesar, Bankiti, Lang, Vora, Liong, Xu, Krishnan, Pan, Baldan and Beijbom2020) and CityScapes (Cordts et al., Reference Cordts, Omran, Ramos, Rehfeld, Enzweiler, Benenson, Franke, Roth and Schiele2016). These datasets publish and regularly update leaderboard tables to compare the performance of novel neural networks (for different tasks), and all developers can submit their results.
However, for automotive datasets, improvements in detection performance are becoming smaller and smaller (Valada, Reference Valada2022). One difficulty is the presence of inaccurate annotations, see Sec. 3.2. In particular, incorrect labeling of the testing/evaluation data split will lead to wrong classification of the predicted boxes. In this work, an investigation into different criteria for dataset annotation is performed, and the effect of different labeling criteria is analyzed.
1.2. Contributions
This article discusses, analyses, and classifies the annotation errors in widely used automotive datasets, namely KITTI and nuScene (Siam et al., Reference Siam, Mahgoub, Zahran, Yogamani, Jagersand and El-Sallab2017; Geiger et al., Reference Geiger, Lenz and Urtasun2012; Caesar et al., Reference Caesar, Bankiti, Lang, Vora, Liong, Xu, Krishnan, Pan, Baldan and Beijbom2020). These identified errors are used as a guide to propose some improved criteria for dataset annotation. As the criteria present some arbitrary aspects (further discussed in the paper), three different sets of criteria are used to generate an equal amount of annotation versions, and these annotation sets are compared using three DNNs, covering the state-of-the-art architectures for object detection. In this context, the main contributions are as follows:
-
1. the authors demonstrate that incorrect annotations have a detrimental effect on the DNNs’ learning and performance, and even small improvements in the training labels can improve performance;
-
2. the performance is dependent on the DNN architecture and the annotation criteria, but overall training with more accurate labels seems beneficial;
-
3. removal of BBs not belonging to visible objects in training is beneficial for the used one and two-stage detectors but not for the used transformer architecture;
-
4. proposing different sets of labeling criteria with different levels of formality can be key to better understand the learning of the DNNs and can support future more accurate annotation processes;
-
5. proposing annotation criteria which can be applied to any automotive datasets and automatically enforced.
The results show that by properly improving the quality of the annotations, an increase of up to 9% can be achieved in the DNN performance when evaluating
 $ {mAP}_{50} $
. Moreover, removing obviously incorrect BBs in the test sets improves the evaluated performance metrics. This step is critical as a better-measured accuracy improves the public perception related to the use of DNNs for AAD tasks. Errors in BBs labels may also hinder the maximum potential of the DNN, affecting the training loss and the adjustments of weights. It is worth noting that this article focuses on the quality of the labeling of the data (real or synthetic), considering that datasets will be far from ideal and will contain sources of noise and imperfections, which will make the application of labeling criteria a complex procedure.
$ {mAP}_{50} $
. Moreover, removing obviously incorrect BBs in the test sets improves the evaluated performance metrics. This step is critical as a better-measured accuracy improves the public perception related to the use of DNNs for AAD tasks. Errors in BBs labels may also hinder the maximum potential of the DNN, affecting the training loss and the adjustments of weights. It is worth noting that this article focuses on the quality of the labeling of the data (real or synthetic), considering that datasets will be far from ideal and will contain sources of noise and imperfections, which will make the application of labeling criteria a complex procedure.
2. Background
The training data can highly affect the performance of the trained neural network. In object detection, BBs are used to define the ground truth. However, the quality of the BBs can differ between datasets, based on tools/annotators creating the labeling, and also within a dataset due to some ambiguities in the data or annotation process. This section presents some annotation processes of datasets and works on understanding errors in datasets.
2.1. Datasets and annotation criteria
Datasets have moved from simple classification tasks of the MNIST dataset, where each sample contain one class, to current big curated datasets, which include frames with multiple objects and different annotations and classes (Deng, Reference Deng2012; Xiao et al., Reference Xiao, Rasul and Vollgraf2017). Existing works on dataset annotation cover different issues that are strongly related to the specific task of the neural network. Some datasets used for object detection have been manually annotated using proprietary software or annotation tools, e.g. WoodScape (Uřičář et al., Reference Uřičář, Křížek, Sistu and Yogamani2019), RADIATE (Sheeny et al., Reference Sheeny, De Pellegrin, Mukherjee, Ahrabian, Wang and Wallace2021), or nuScenes (Caesar et al., Reference Caesar, Bankiti, Lang, Vora, Liong, Xu, Krishnan, Pan, Baldan and Beijbom2020). nuScenes has also published instructions for their labeling; however, these labels are open to interpretation and produce errors similar to the ones identified in other datasets, e.g. KITTI MoSeg dataset, as shown in Figure 1. Other datasets have been developed and annotated using deep learning methods such as active learning and neural networks (Angus et al., Reference Angus, ElBalkini, Khan, Harakeh, Andrienko, Reading, Waslander and Czarnecki2018; Janosovits, Reference Janosovits2022; Meyer & Kuschk, Reference Meyer and Kuschk2019). These methods of annotation are otherwise known as semiautomatic. Further techniques include the development of new annotation tools to adapt current datasets to specific use cases in AAD (Arief et al., Reference Arief, Arief, Zhang, Liu, Bhat, Indahl, Tveite and Zhao2020; Wang et al., Reference Wang, Acuna, Ling, Kar and Fidler2019). However, in the above-mentioned datasets, the specific criteria used to define how annotations should be implemented are missing, not explicit or ambiguous.

Figure 1. Examples of errors (highlighted by dotted rectangles) in the BBs (green rectangles) of KITTI MoSeg (left) and nuScenes (right): upper frames show missing BBs, and lower frames show BBs not belonging to any objects
Interestingly, the VOC dataset has published the 2011 annotation guidelines used for labeling (Everingham et al., Reference Everingham, Van Gool, Williams, Winn and Zisserman2009). The guidelines provide guidance on which images to label and how they should be categorized. Examples include categorizing an object as occluded if more than 5% of the object within a BB is occluded, and there are images considered too difficult to segment and left unlabeled, e.g. a nest of bicycles.
2.2. Quality of annotations
Due to the effort and complexity required to annotate datasets, there are often errors associated with some of the labels. Recent works are trying to understand how these errors affect the DNN performance and how to improve the quality of the annotations. Notably, Ma et al. have presented a work in which they reannotated the MS COCO and Google Open Images datasets by providing a description of the object as well as providing some common examples of positive or negative cases which are open to the interpretation of the annotators (Ma et al., Reference Ma, Ushiku and Sagara2022). They have trained five neural network models based on the original labels and the new labels. For the COCO dataset, only some of the considered performance metrics improved due to reannotation, whereas the results on Google Open Image are improved after training and/or testing with the new annotations. Northcutt et al. provided a study into commonly used datasets for ML to understand and categorize the errors in labeling (Northcutt et al., Reference Northcutt, Athalye and Mueller2021). In addition, they provided results on benchmarking datasets, comparing the original labels with corrected labels. Their results showed that lower capacity/simpler networks are more robust against the effects of erroneous labels. Tsipras et al. have focused on ImageNet dataset (Tsipras et al., Reference Tsipras, Santurkar, Engstrom, Ilyas and Madry2020). The original ImageNet dataset provided only one class per image; however, each image may contain several secondary objects or clutter. Tsipras relabeled a subset of the ImageNet database (10 images per class, 10,000 images in total) and provided multiclass annotations where appropriate in their subset. The neural network performed worse on images that had multiple object classes in the scene with respect to images with only one object. Additionally, Tsipras et al. investigated the performance of the trained DNN when evaluating real-world data by comparing the neural network predictions with the classes identified by human annotators. More accurate models are in better agreement with the human annotators, and even when some network predictions are technically wrong, there is often an agreement with the classification by the human annotators (that is identification of dog breeds by nonspecialists).
2.3. DNN-based object detection
As previously mentioned, DNNs are expected to play a key role in AAD functions. One of the basic and most important tasks is the detection of the road stakeholders, and particularly vehicles, as they cause most of the accidents (Feng et al., Reference Feng, Harakeh, Waslander and Dietmayer2021; Rashed et al., Reference Rashed, Mohamed, Sistu, Kumar, Eising, El-Sallab and Yogamani2021). Object detectors can be broadly divided into two classes. Moreover, recently, there have been several implementations of object detectors using transformers (He et al., Reference He, Zhou, Li, Niu, Cheng, Li, Liu, Tong, Ma and Zhang2021; Carion et al., Reference Carion, Massa, Synnaeve, Usunier, Kirillov and Zagoruyko2020); a comprehensive review of object detectors is given in (Zaidi et al., Reference Zaidi, Ansari, Aslam, Kanwal, Asghar and Lee2022). Vision transformers are becoming very popular due to their promising performance; however, they usually require more epochs to converge and typically do not perform well on small objects (Yao et al., Reference Yao, Ai, Li and Zhang2021). In terms of the two “traditional” categories of object detectors, the one-stage and two-stage detectors, several architectures have been proposed through the years. Usually, one-stage detectors are faster but have lower accuracy than two-stage detectors. However, the two-stage Faster R-CNN have a good balance in terms of speed and accuracy; hence, they are frequently used for AAD functions.
As a part of the hereby proposed work, the authors have selected one implementation for each type of object detector (one-stage, two-stage, and transformer) to understand if the observed trends in the results, when reannotating the datasets, are common across different architectures for the same perception task, that is object detection.
3. Methodology
In this work, the annotations of different automotive datasets were reviewed, and several errors were identified. Moreover, KITTI MoSeg dataset was reannotated using three different sets of proposed criteria by the authors, that is C1, C2, and C3, see Section 3.2. Three DNNs were fine-tuned on the dataset four separate times: with the original ground truth labels as well as with the three new sets of labels generated according to the defined criteria, resulting in 12 trained networks (4 per DNN type), see Section 3.3. These 12 networks were then used to evaluate the testing datasets on the 4 sets of labels (that is MoSeg original and C1-C2-C3).
3.1. KITTI MoSeg
The KITTI MoSeg dataset is a subset of the highly cited KITTI Benchmarking Vision Suite dataset (Siam et al., Reference Siam, Mahgoub, Zahran, Yogamani, Jagersand and El-Sallab2017; Geiger et al., Reference Geiger, Lenz and Urtasun2012). Compared to the KITTI dataset, KITTI MoSeg provides chronological sequences of frames, totaling 1449 frames (Siam et al., Reference Siam, Mahgoub, Zahran, Yogamani, Jagersand and El-Sallab2017). The KITTI MoSeg dataset provides 2D BB labels for car and van; the proposed work merged them into a single vehicle class. This choice was made due to the poor ratio between the two classes in the dataset.
In the KITTI MoSeg dataset, the original annotations were expanded by using the information available in the original dataset (3D BB, odometry information), where 3D ground truth BBs were converted into 2D BBs, associating BBs across chronological frames to obtain estimated velocity per BB. Finally, a filtering process was applied to keep objects consistently identified across frames (Siam et al., Reference Siam, Mahgoub, Zahran, Yogamani, Jagersand and El-Sallab2017). As the experiments proposed in this paper entail manually reannotating the same dataset three times, a dataset with moderate size was the best choice. However, the BB errors tackled in this paper are common across different automotive datasets.
3.2. Re-annotation criteria
From preliminary findings, the original labels in some automotive datasets were visually inspected to identify potential BB problems which can affect DNN evaluation metrics. The majority of the identified errors can be categorized using the definitions below:
-
• Missing: There are clear and obvious vehicles in the frames which are not labeled.
-
• Incorrect: There is no object in the labeled class in the BB.
-
• Bad Fit: The BB size and/or position are not appropriate for the identified object.
-
• Occlusion: The BB predicts the full size of the object, not only what is visible.
Based on these identified problems, three sets of BB criteria were defined to ensure that the annotation process is more consistent, see Table 1. These sets of criteria were implemented one at a time to completely reannotate the KITTI MoSeg manually, using an ad hoc Matlab app developed by the authors. Although human labeling error can still exist, some of the criteria can be coded to ensure the drawn BB meets the criteria. The defined sets of criteria are not specific to this dataset and can be applied to any other datasets.
Table 1. The three sets of criteria for the reannotation of the KITTI MoSeg dataset for object detection

* Incorrect stands for BBs that clearly do not belong to any target objects
For Criteria 1 (C1), the guidelines are defined as much as possible in an objective way and based on what features are expected to be learnt by the neural network (that is wheels, shapes, etc.). C1.1 specifies the minimum dimension of a BB based on an analysis of box sizes in the original KITTI MoSeg labels. In the specific automotive use case, vehicles in the far distance cover less pixels, and they are not of immediate safety concern. However, the minimum BB dimension can be tailored based on the detection requirements. For C1.2, a 3-pixel error was defined to consider annotation inaccuracies to identify the exact edge of an object and issues due to the lack of contrast at the edges, but avoiding significant errors at the smallest size based on C1.1. C1.3 ignores occluded regions from the BB, avoiding incorrect features to be learnt by the network. A minimum threshold of 20% is applied in C1.4 to determine the minimum visibility of the object. The 20% visibility is inline with the 20% visibility by nuScenes nuImages Annotator Instructions (Caesar et al., Reference Caesar, Bankiti, Lang, Vora, Liong, Xu, Krishnan, Pan, Baldan and Beijbom2020). However, the determination of the 20% is subjective to the annotator or even to an “automated” implementation as it is based on estimation.
In Criteria 2 (C2), the labels were created to the best of the annotator ability to identify vehicles in each frame but still keeping a small set of guidelines. The annotator was one of the authors. Object identified according to C2 are expected to be closer to real world, where all the vehicles should be identified by the DNN.
Finally, in Criteria 3 (C3), the annotator did not resize nor add any BBs, but only removed the BBs not belonging to real objects; in the case of multiple BBs encompassing the same vehicle, the annotator kept only the BB deemed as the best fit for that vehicle.
3.3. Neural networks
The four annotated dataset variations were used to train three different network architectures: Faster R-CNN (Ren et al., Reference Ren, He, Girshick and Sun2015), YOLOv5 (Jocher et al., Reference Jocher, Chaurasia, Stoken, Borovec, Kwon, TaoXie, Michael, Fang, imyhxy, Wong, Yifu, Montes, Wang, Fati, Nadar, Skalski, Hogan, Strobel, Jain, Mammana and xylieong2022), and DETR (Carion et al., Reference Carion, Massa, Synnaeve, Usunier, Kirillov and Zagoruyko2020). Faster R-CNN is an example of two-stage detector, which predicts BBs from region proposals. On the other hand, YOLO is a single-stage detector that does BB regression from anchors. Finally, DETR directly performs BB prediction with respect to the input image. For each network model described in the list below, the training process was performed four times from the base model (one for each dataset variation based on the annotation criteria, that is Original, C1, C2, and C3) on the whole original or relabeled training image set, leading to four different trained DNNs per architecture.
-
• Faster R-CNN. The network of choice consists of a ResNet-50 backbone with FPN (Feature Pyramid Network) feature extractor from the torchvision library (He et al., Reference He, Zhang, Ren and Sun2016; Lin et al., Reference Lin, Dollár, Girshick, He, Hariharan and Belongie2017). It was originally pretrained on COCO and then fine-tuned over the dataset of interest. The training was performed using the AdamW optimizer with a learning rate set to
 $ {10}^{-3} $
and weight decay set to 0.2. In addition, learning rate scheduler with gamma 0.9 and step size 25 was used.
$ {10}^{-3} $
and weight decay set to 0.2. In addition, learning rate scheduler with gamma 0.9 and step size 25 was used. -
• YOLOv5. The training was performed starting from the pre-trained yolov5m with most parameters left to their default value. The backbone was frozen, image size set to 640 px, and optimiser set to AdamW.
-
• DETR. The network of choice consists of a ResNet-50 convolutional feature extractor from the hugging face library (He et al., Reference He, Zhang, Ren and Sun2016). It was originally pretrained on COCO and then fine-tuned over the dataset of interest. The training was performed using the AdamW optimiser with learning rate set to
$ {10}^{-5} $
for the backbone and
$ {10}^{-4} $
for the other layers and weight decay set to
$ {10}^{-4} $
.




3.4. Evaluation metrics
The trained networks were all evaluated and compared using
 $ {mAP}_{50} $
, due to the presence of small size objects in the dataset. In fact, minor location offsets and size errors for predicted boxes can result in a much lower Intersection over Union (IoU) for small objects. For safety critical functions in automated vehicle, it is still important to detect the object, even if the location/size may be slightly off. The YOLOv5 repository provides this evaluation metric, and the torchmetrics library was used to compute
$ {mAP}_{50} $
, due to the presence of small size objects in the dataset. In fact, minor location offsets and size errors for predicted boxes can result in a much lower Intersection over Union (IoU) for small objects. For safety critical functions in automated vehicle, it is still important to detect the object, even if the location/size may be slightly off. The YOLOv5 repository provides this evaluation metric, and the torchmetrics library was used to compute
 $ {mAP}_{50} $
for Faster R-CNN and DETR implementations. Thus, the three reannotation criteria are compared using the three main types of neural network-based object detectors.
$ {mAP}_{50} $
for Faster R-CNN and DETR implementations. Thus, the three reannotation criteria are compared using the three main types of neural network-based object detectors.
4. Results and discussion
The number of ground truth BBs was computed for each relabeled dataset, see Table 2. According to C3, which seeks to remove the incorrect or fully occluded BBs, there are 612 BBs (8.2%) which were deemed to be incorrect in the original dataset. C2 produced the largest amount of BBs based on what the human annotator could identify. Many of C2 BBs differ from BB identified via C1, due to objects being too small, or occlusion too high.
Table 2. Number of ground truth BBs for each set of annotations, with C# denoting the number of the set of criteria (1–3), and MoSeg denoting the original labels. The total number of frames (and their split into training and testing parts) remains the same throughout all the experiments

During the reannotation process, there were some difficulties in adhering strictly to the identified criteria, and some labels can be subjective or open to interpretation, roughly representing 10% of the labels. Some of these cases have been listed in Table 3 and visually demonstrated in Figure 2. For example, 3 pixel error was selected to allow minor flexibility for the annotator and considering situations with low contrast (case 6). However, if the vehicle has a minimum size BB of 15 by 15 pixels (C1.1), a 3 pixel error results in a BB that is 44% larger than the ‘real’ size (see case 2, Table 3). Moreover, if the BB was drawn even 1 pixel smaller, it would not meet the criterion 1.1 anymore. This situation is common in the dataset, particularly for parked vehicles.
Table 3. Examples of ambiguous situations when applying the proposed criteria, related visual examples are given in Figure 2
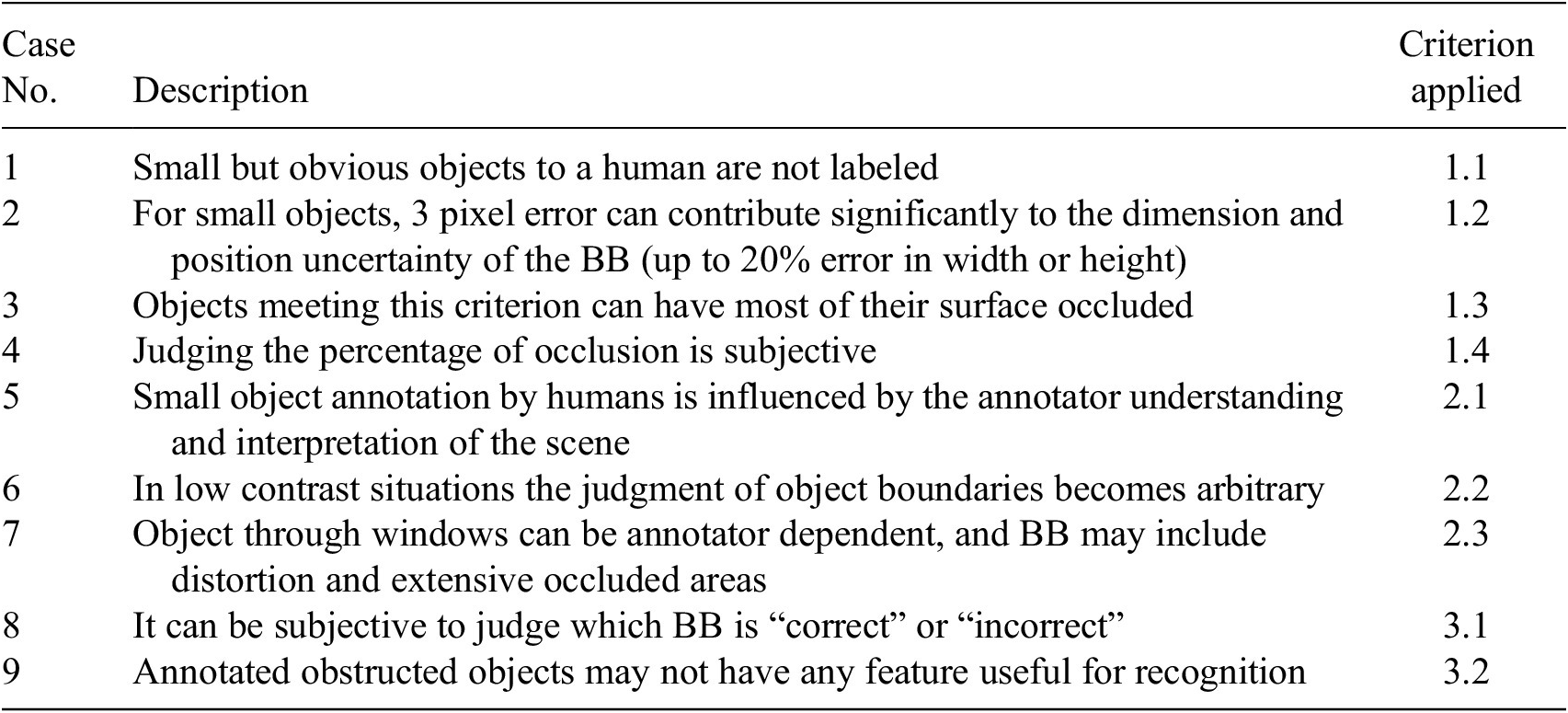

Figure 2. Examples of cases that are ambiguous or open to interpretation cases depending on the criterion applied
Another common ambiguous scenario is occluded objects, in particular, cases 4, 7, and 9 in Table 3. For case 4, the object is labeled based on criterion 1.4. The BB may be highly subjective, as the visible part of the vehicle in the frame prevents the annotator to know the true object size and may require understanding of vehicle model and pose to truly estimate the occlusion amount. Additionally, case 9 identifies that the occlusion may hide key features of an object that neural networks may look for. Another peculiar case in the automotive field is that vehicles have windows that are transparent or translucent (case 7); hence, it is possible to see parts of an occluded object through the vehicle’s window. In C2, the annotator handled these situations by including the area occluded but seen through the window; these BBs are again subjective, and the annotated objects might not have any visible features relevant to DNNs.
Figures 3a to 3c presents the mAP of the three different types of DNNs trained and evaluated on the datasets with the 4 different sets of annotations (different colors stand for the criteria used for the annotations of the training dataset). The values for the 48 combinations are reported in Table 4. When comparing testing on original MoSeg labels with respect to testing on C3 labels, all the networks performed better on C3. As the erroneous ground truth BBs are removed in C3 annotations, this BB reduction will also decrease the number of false negatives. However, due to the large difference in number of ground truth BBs in the test set between C3 and the other sets of annotations (~13% lower than the original MoSeg labels, Table 2), a bias can be created in the results and falsely indicate that the DNN is performing better in the real-world situation. An important finding is that removing the clearly wrong or redundant BBs improves the DNN computed performance metrics, improving the public confidence in automated vehicles’ technology.

Figure 3. Calculated mAP50 for a) Faster R-CNN, b) YOLOv3, c) DETR; on the x-axis, there are the annotations used for the testing datasets, and the different colors stand for the different labels of the training and validation sets
Table 4.
 $ {mAP}_{50} $
of the three network models trained on the different criteria (rows) and tested on the different criteria (columns)
$ {mAP}_{50} $
of the three network models trained on the different criteria (rows) and tested on the different criteria (columns)

Based on the method of annotation, C2 ground truth reflects more accurately the real-world performance, as the annotator is identifying almost all the vehicles in each frame. The “realism” of C2 is then followed by C1, where manual labeling has a few stricter requirements. These requirements can be the basis for a semiautomated labeling procedure in the future. In all of the results when testing for “real world” performance (that is testing with C1 and C2), training with labels based on C2 performed the best, followed by C1. Compared to C1, C2 provides ground truth BBs for smaller objects and higher degrees of occlusion that would otherwise be filtered out. For all the network architectures, trained with C2 labels and tested in the case of improved labels (C1 and C2 for the testing set), the performance is always better than training with MoSeg labels. There are two factors likely providing the better performance: firstly, the higher number of training ground truth BBs in C2, and secondly, much more smaller (but accurate) BBs to train from.
For YOLOv5 and Faster R-CNN, the difference in performance between networks trained on MoSeg labels compared to C3 training the DETR DNN, MoSeg labels always perform better, independently of the labels used for testing. In fact, for the DETR model, see Figure 3c, training with C3 performed around 0.03–0.04 worse in terms of mAP than training with MoSeg labels. The DETR network requires a significant amount of training data, and overall, the selected dataset was small enough to enable the manual relabeling process (Carion et al., Reference Carion, Massa, Synnaeve, Usunier, Kirillov and Zagoruyko2020). In fact, it is noticeable that DETR performs better with the relabeled dataset with the highest number of ground truth BBs (C2) and worst with the datset with fewer BBs (C3). It is expected that its overall performance can be improved with bigger datasets and with hyperparameter tuning, but the trends will remain the same. This reduced performance could be due to the lower number of training annotations in C3 dataset, or, given the different learning process in transformers, erroneous BBs may actually help the generalization of the DETR network.
Finally, overall, the trends and performance in the plots are similar for the one-stage and two-stage detectors, whereas, as mentioned before, they are different for the DETR. That again highlights that the learning process has an impact on the overall outcome. Moreover, even though transformers are supposed to have worst performance with small objects, when DETR is trained with C2 (including the smallest vehicle BBs), the performance is the best for all testing labels. In addition, training and testing on original MoSeg is never the best combination for all the architectures.
5. Conclusion
This work investigated the quality of the annotations in automotive datasets. Three sets of reannotation criteria are proposed based on the categories of errors identified by visual inspection of commonly used automotive datasets and their original BBs. The newly generated labels are then used to train different neural network architectures, in turn used to evaluate the four different set of labels (that is original and the three proposed criteria). Between the original labels and the reannotations, Criteria 2 (that is labeling carried out to the best of a human annotator) is likely the most representative of vehicles identification by a human driver. Overall, when predicting real-world situations, networks trained based on the original labels and also a set of labels where the obvious labeling errors were removed (Criteria 3), perform worse than the C1 and C2, set out more formally for the manual annotation. All three different architectures types of DNNs used in this work performed better with the stricter labels compared to the original labels. Setting some strict criteria and guidelines in the annotation process will have a positive effect on both the training and evaluation of the networks. However, the selection of the criteria parameters will affect the number of BBs in the annotations and the performance of the DNNs. The proposed criteria can be adopted and applied to any automotive datasets, and nonsubjective criteria can be automatically enforced.
This work highlights that, in specific fields, it is imperative to ensure that the ground truth annotations are appropriately labeled for the specific use case, especially getting it right the first time using clear and enforceable criteria to avoid reannotation. In the case of AAD, the safety of the vehicle and the control decisions are important concerns. In this use case, all objects which may compromise the safety should be appropriately labeled in benchmarking datasets. However, the use case can vary from vehicle to vehicle, depending on the specific AAD function, the operational design domain, and the selected scenarios, and therefore it has an implication on which objects have to be detected. It may be unreasonable to create new datasets per use case, and hence, this work stresses the importance of clear criteria for annotations and the possibility to add metadata/sublabels to improve label quality for AAD. For example, in this work, by providing some metadata for C2, such as occlusion, percentage of occlusion, truncation, etc., an automated filtering process can be used to produce labels aligned to a set of criteria similar to C1. Metadata can also allow a further understanding of the learning process and the key features for learning and support a more automated process for producing use case-specific labels. Additionally, metadata can allow for an understanding of which types of objects in a class are less likely to be identified, and therefore, ad hoc data augmentation can be carried out for these cases.
Data availability statement
The reannotated labels for the three sets of criteria used in this work are released and can be accessed at: https://github.com/WMG-IV-Sensors/WMG_MoSeg.
Acknowledgements
The authors acknowledge Lucy Inett for her work on the labeling. Dr Donzella acknowledges that this work was supported by the Royal Academy of Engineering under the Industrial Fellowships scheme. The authors wish to acknowledge the support of High Value Manufacturing CATAPULT.
Author contribution
Please provide an author contributions statement using the CRediT taxonomy roles as a guide \ https://www.casrai.org/credit.html. Conceptualization: A.A. and A.B. Methodology: A.A. and A.B. Data curation: A.C. Data visualization: A.C. Writing original draft: A.A. and A.B. All authors approved the final submitted draft.
Funding statement
Cofunded by the European Union. Views and opinions expressed are however those of the author(s) only and do not necessarily reflect those of the European Union or European Climate, Infrastructure and Environment Executive Agency (CINEA). Neither the European Union nor the granting authority can be held responsible for them. Project grant no. 101069576. UK participants in this project are cofunded by Innovate UK under contract no.10045139.
Ethical standard
The research meets all ethical guidelines, including adherence to the legal requirements of the study country.









 Open access
Open access
Comments
No Comments have been published for this article.