



1. Introduction
Rayleigh–Taylor instability (RTI) is a phenomenon that occurs when a heavy fluid is accelerated into a light fluid. Specifically, RTI occurs when the following are present: (1) a density gradient, (2) an acceleration (associated with the body force) in the direction opposite to that of the density gradient, and (3) a perturbation at the interface of the two fluids. RTI is present in many scientific and engineering applications, such as supernovae (Gull Reference Gull1975) and inertial confinement fusion (ICF) (Lindl Reference Lindl1995; Zhou Reference Zhou2017). In the case of ICF, RTI occurs when a perturbation forms between the outer heavy ablator and the inner light deuterium gas, which causes premature mixing in the target, thereby greatly reducing the efficiency of the process. Thus RTI is of great interest to scientists and engineers, especially in the context of ICF.
During a typical ICF experiment design process, a Reynolds-averaged Navier–Stokes (RANS) approach is often utilized to model the role of hydrodynamic instabilities such as RTI. This is despite the fact that RTI can be more accurately predicted using high-fidelity methods like direct numerical simulations (DNS) (Youngs Reference Youngs1994; Cook & Dimotakis Reference Cook and Dimotakis2001; Cook & Zhou Reference Cook and Zhou2002; Cabot & Cook Reference Cabot and Cook2006; Mueschke & Schilling Reference Mueschke and Schilling2009) and large eddy simulations (LES) (Darlington, McAbee & Rodrigue Reference Darlington, McAbee and Rodrigue2002; Cook, Cabot & Miller Reference Cook, Cabot and Miller2004; Cabot Reference Cabot2006). Motivation for development of RANS models for various engineering applications like ICF can be understood by considering the computational cost of each method. DNS requires resolution of the smallest turbulent scales, and LES the energy-containing scales, which are still much smaller than the macroscopic physics (i.e. averaged fields) of engineering interest. On the other hand, by design, RANS must resolve only macroscopic scales, thereby requiring much lower computational cost. Thus RANS models are commonly used in engineering practice, especially in design optimization, where hundreds of thousands of simulations are often performed. Such is especially the case in designing targets for ICF experiments (Casey et al. Reference Casey2014; Khan et al. Reference Khan2016). Due to the utility of RANS in such applications, the need for predictive RANS models remains salient.
Models of varying complexities have been applied to the RTI problem. Among the types used most commonly are two-equation models. One such model is the ubiquitously used  $k$-
$k$- $\varepsilon$ model (Launder & Spalding Reference Launder and Spalding1974). In particular, Gauthier & Bonnet (Reference Gauthier and Bonnet1990) introduced algebraic relations for some closures to satisfy realizability constraints for the model to be valid under the strong gradients of RTI. Another popular two-equation model is the
$\varepsilon$ model (Launder & Spalding Reference Launder and Spalding1974). In particular, Gauthier & Bonnet (Reference Gauthier and Bonnet1990) introduced algebraic relations for some closures to satisfy realizability constraints for the model to be valid under the strong gradients of RTI. Another popular two-equation model is the  $k$-
$k$- $L$ model; a version was introduced by Dimonte & Tipton (Reference Dimonte and Tipton2006) for RTI. One appeal of the
$L$ model; a version was introduced by Dimonte & Tipton (Reference Dimonte and Tipton2006) for RTI. One appeal of the  $k$-
$k$- $L$ model is its inclusion of a transport equation for turbulence length scale
$L$ model is its inclusion of a transport equation for turbulence length scale  $L$ (in place of the transport equation for
$L$ (in place of the transport equation for  $\varepsilon$ in
$\varepsilon$ in  $k$-
$k$- $\varepsilon$) that can be related to the initial interface perturbation. The self-similarity of turbulent RTI is leveraged to set the model coefficients.
$\varepsilon$) that can be related to the initial interface perturbation. The self-similarity of turbulent RTI is leveraged to set the model coefficients.
These two-equation models rely on the gradient diffusion approximation for the turbulent mass flux closure. The gradient diffusion approximation rests on the assumption that turbulence transports quantities in a manner similar to Fickian diffusion. Importantly, this approximation implies purely local dependence of the mean turbulent flux on the mean gradient, ignoring history effects and gradients at nearby points in space. However, this approximation may not be valid for mean scalar transport. Specifically, the turbulent mass flux contains features that the gradient diffusion approximation cannot capture (Denissen et al. Reference Denissen, Rollin, Reisner and Andrews2014; Morgan & Greenough Reference Morgan and Greenough2015), so a local coefficient may not be enough to scale the mean gradient to model turbulent mass flux.
Non-locality in RTI has been studied in experiments and simulations. Clark, Harlow & Moses (Reference Clark, Harlow and Moses1997) analysed data from turbulent RTI experiments, and compared the pressure–strain correlation and pressure production due to turbulent mass flux, suggesting spatial non-locality of pressure effects. Studies using DNS by Ristorcelli & Clark (Reference Ristorcelli and Clark2004) and experiments by Mueschke, Andrews & Schilling (Reference Mueschke, Andrews and Schilling2006) have also examined non-locality of RTI in the context of two-point correlations. Thus the non-local nature of RTI is well known, and work has been done to capture this non-locality in models. For example, two-point closures to account for non-locality in RTI have been developed by several authors for RANS (Clark & Spitz Reference Clark and Spitz1995; Steinkamp, Clark & Harlow Reference Steinkamp, Clark and Harlow1999b,Reference Steinkamp, Clark and Harlowa; Pal et al. Reference Pal, Kurien, Clark, Aslangil and Livescu2018; Kurien & Pal Reference Kurien and Pal2022) and LES (Parish & Duraisamy Reference Parish and Duraisamy2017). While these works attempt to address the effects of non-locality in RTI, they do so without directly studying the form of the non-local operator.
Several authors have studied ways to directly measure the non-local eddy diffusivity in other canonical flows. One such approach involves application of the Green's function. The Green's function approach starts from analytical derivations of relations between turbulent fluxes and mean gradients, which was done by Kraichnan (Reference Kraichnan1987). Hamba (Reference Hamba1995) then introduced a reformulation of these relations appropriate for numerical computation of non-local eddy diffusivities, which has been applied to study channel flow (Hamba Reference Hamba2004) and, most recently, homogeneous isotropic turbulence (HIT) (Hamba Reference Hamba2022).
A different approach to determining non-local eddy diffusivities is the macroscopic forcing method (MFM) by Mani & Park (Reference Mani and Park2021). In contrast to the Green's function approach, MFM is derived by considering arbitrary forcing added directly to the transport equations, with its formulation rooted in linear algebra. Additionally, MFM offers extensions to the Green's function approach by utilization of forcing functions that are not of the form of a Dirac delta. Harmonic forcing has been utilized to derive analytical fits to non-local operators in Fourier space (Shirian & Mani Reference Shirian and Mani2022). Additionally, forcing polynomial mean fields using the inverse MFM offers a computationally economical path for determination of spatio-temporal moments of the eddy diffusivity operator in conjunction with the Kramers–Moyal expansion, as opposed to computation of the moments from a full MFM analysis through post-processing (Mani & Park Reference Mani and Park2021). Previous works using MFM have revealed turbulence operators for a variety of flows. Shirian & Mani (Reference Shirian and Mani2022) and Shirian (Reference Shirian2022) measured non-local operators in space and time in HIT. Though the spatial non-local operator was measured in HIT, it was applied to a turbulent round jet, and was shown to match experiments more closely than the purely local Prandtl mixing length model. MFM has also been applied to turbulent wall-bounded flows, including channel flow (Park & Mani Reference Park and Mani2023b) and separated boundary layers (Park, Liu & Mani Reference Park, Liu and Mani2022; Park & Mani Reference Park and Mani2023a), to measure the anisotropic but local eddy diffusivity. In those flows, incorporation of the MFM-measured anisotropic eddy diffusivity improved RANS model predictions significantly, and remaining model errors were attributed to missing non-local effects.
It is with a motivation towards RANS model improvement that the present work seeks to understand non-locality of closure operators governing turbulent scalar flux transport in RTI using MFM. Note that it is not intended for MFM to supplant current RANS models. Instead, MFM is an analysis tool that can be used to assess models and discover the necessary characteristics for accurate models. Here, MFM allows for direct measurement of non-local closure operators, which has not yet been done in RTI. This new knowledge of non-locality of the mean scalar transport closure operator in RTI will aid in the development of improved RANS models used for studying ICF.
It is important to note that this work presents MFM measurements for a simplified RTI problem: the flow is two-dimensional, incompressible and low Atwood number, and only passive scalar mixing is considered. Since the eddy diffusivity is not universal, the MFM measurements of its moments presented here cannot be extended directly to more complex RTI. However, valuable insight into trends in the eddy diffusivity for mean scalar transport in RTI can be gained in this work. This follows the common process for developing turbulence models, where models are first designed for simpler flows, then tested on and adjusted for more complex flows. In this work, MFM is performed on a simplified RTI problem to give a preliminary look into the eddy diffusivity of Rayleigh–Taylor-type flows, but future work will involve extensions to more complex flow characteristics that are closer to the practical flow observed in ICF capsules. The intent of this work is to present MFM as a tool for determining characteristics of the eddy diffusivity of a flow (i.e. its non-locality and the importance of its higher-order moments) that a model should satisfy in order to accurately predict mean scalar transport. The current work will inform future studies with additional complexities, including three-dimensionality, finite Atwood number, compressibility, and coupling with momentum.
This work is organized as follows. First, an overview of RTI is covered briefly in § 2. Next, § 3 gives an overview of the mathematical methods used in this work, including: (1) the generalized eddy diffusivity and its approximation via a Kramers–Moyal expansion; (2) MFM and its application for finding the eddy diffusivity moments; (3) self-similarity analysis. Simulation details, including the governing equations and the computational approach, are given in § 4. Finally, results of several studies on the importance of higher-order eddy diffusivity moments as well as assessments of suggested operator forms incorporating non-locality of the eddy diffusivity for mean scalar transport in RTI are presented in § 5. The results show that non-locality of the eddy diffusivity is important in mean scalar transport of the RTI problem studied here, and RANS models incorporating this non-locality result in more accurate predictions than in leading-order models.
2. Brief overview of RTI
RTI is characterized by spikes (heavy fluid moving into light fluid) and bubbles (light fluid into heavy fluid). The mixing widths of these spikes and bubbles are denoted as  $h_s$ and
$h_s$ and  $h_b$, respectively, and the mixing half-width is defined as
$h_b$, respectively, and the mixing half-width is defined as  $h=(h_s+h_b)/2$. The behaviours of these quantities in RTI are dependent on the Atwood number, defined as
$h=(h_s+h_b)/2$. The behaviours of these quantities in RTI are dependent on the Atwood number, defined as
 \begin{equation} A=\frac{\rho_H-\rho_L}{\rho_H+\rho_L}. \end{equation}
\begin{equation} A=\frac{\rho_H-\rho_L}{\rho_H+\rho_L}. \end{equation}
Here,  $\rho _H$ and
$\rho _H$ and  $\rho _L$ are the densities of the heavy and light fluids, respectively. In the limit of low Atwood number and late time, the mixing layer width is expected to reach a self-similar state of growth that scales quadratically with time:
$\rho _L$ are the densities of the heavy and light fluids, respectively. In the limit of low Atwood number and late time, the mixing layer width is expected to reach a self-similar state of growth that scales quadratically with time:
 \begin{equation} h\approx\alpha Agt^2, \end{equation}
\begin{equation} h\approx\alpha Agt^2, \end{equation}
where  $\alpha$ is the mixing width growth rate. The mixing width growth rate can also be viewed as the net mass flux through the midplane (Cook et al. Reference Cook, Cabot and Miller2004). In this case,
$\alpha$ is the mixing width growth rate. The mixing width growth rate can also be viewed as the net mass flux through the midplane (Cook et al. Reference Cook, Cabot and Miller2004). In this case,  $\alpha$ can also be written as
$\alpha$ can also be written as
 \begin{equation} \alpha = \frac{\dot{h}^2}{4Agh}, \end{equation}
\begin{equation} \alpha = \frac{\dot{h}^2}{4Agh}, \end{equation}
where  $\dot {h}$ is the time derivative of
$\dot {h}$ is the time derivative of  $h$. In the limit of self-similarity, these two definitions of
$h$. In the limit of self-similarity, these two definitions of  $\alpha$ are expected to converge to the same value.
$\alpha$ are expected to converge to the same value.
In a simulation,  $h$ can be measured as
$h$ can be measured as
 \begin{equation} h \equiv 4\int\langle Y_H(1-Y_H) \rangle \,{{\rm d} y}, \end{equation}
\begin{equation} h \equiv 4\int\langle Y_H(1-Y_H) \rangle \,{{\rm d} y}, \end{equation}
where  $Y_H$ is the mass fraction of the heavy fluid (therefore
$Y_H$ is the mass fraction of the heavy fluid (therefore  $Y_L=1-Y_H$ is the mass fraction of the light fluid), and
$Y_L=1-Y_H$ is the mass fraction of the light fluid), and  $\langle * \rangle$ denotes averaging over realizations and homogeneous direction
$\langle * \rangle$ denotes averaging over realizations and homogeneous direction  $x$. An alternative definition used in works such as Cabot & Cook (Reference Cabot and Cook2006) and Morgan et al. (Reference Morgan, Olson, White and McFarland2017) is
$x$. An alternative definition used in works such as Cabot & Cook (Reference Cabot and Cook2006) and Morgan et al. (Reference Morgan, Olson, White and McFarland2017) is
 \begin{equation} h_{hom} \equiv 4\int\langle Y_H \rangle \left(1-\langle Y_H \rangle \right)\,{{\rm d} y}. \end{equation}
\begin{equation} h_{hom} \equiv 4\int\langle Y_H \rangle \left(1-\langle Y_H \rangle \right)\,{{\rm d} y}. \end{equation}
This definition is particularly useful, since it allows  $h$ to be determined solely based on the RANS field. That is, there is no closure problem in determining
$h$ to be determined solely based on the RANS field. That is, there is no closure problem in determining  $h$ with this definition. Thus this is the
$h$ with this definition. Thus this is the  $h$ reported in this work.
$h$ reported in this work.
From these two definitions, a mixedness parameter  $\phi$ can be defined, which can be interpreted as the ratio of mixed to entrained fluid (Youngs Reference Youngs1994; Morgan et al. Reference Morgan, Olson, White and McFarland2017):
$\phi$ can be defined, which can be interpreted as the ratio of mixed to entrained fluid (Youngs Reference Youngs1994; Morgan et al. Reference Morgan, Olson, White and McFarland2017):
 \begin{equation} \phi \equiv \frac{h}{h_{hom}}=1-4\,\frac{\int\langle Y_H'Y_H' \rangle \,{{\rm d} y}}{h_{hom}}. \end{equation}
\begin{equation} \phi \equiv \frac{h}{h_{hom}}=1-4\,\frac{\int\langle Y_H'Y_H' \rangle \,{{\rm d} y}}{h_{hom}}. \end{equation}
In the limit of self-similarity,  $\phi$ is expected to approach a steady-state value.
$\phi$ is expected to approach a steady-state value.
A metric for turbulent transition is the Taylor Reynolds number
 \begin{equation} Re_T = \frac{k^{1/2}\lambda}{\nu}, \end{equation}
\begin{equation} Re_T = \frac{k^{1/2}\lambda}{\nu}, \end{equation}
where  $k=\langle u_i'u_i' \rangle /2$ is the turbulence kinetic energy, and
$k=\langle u_i'u_i' \rangle /2$ is the turbulence kinetic energy, and  $\lambda$ is the effective Taylor microscale, approximated by
$\lambda$ is the effective Taylor microscale, approximated by
 \begin{equation} \lambda = \sqrt{\frac{10\nu L}{k^{1/2}}}. \end{equation}
\begin{equation} \lambda = \sqrt{\frac{10\nu L}{k^{1/2}}}. \end{equation}
Here, the turbulence length scale  $L$ can be approximated as
$L$ can be approximated as  $\tfrac {1}{5}$ of the mixing layer width (Morgan et al. Reference Morgan, Olson, White and McFarland2017). The large-scale Reynolds number can also be examined (Cabot & Cook Reference Cabot and Cook2006):
$\tfrac {1}{5}$ of the mixing layer width (Morgan et al. Reference Morgan, Olson, White and McFarland2017). The large-scale Reynolds number can also be examined (Cabot & Cook Reference Cabot and Cook2006):
 \begin{equation} Re_L = \frac{h_{99}\dot{h}_{99}}{\nu}, \end{equation}
\begin{equation} Re_L = \frac{h_{99}\dot{h}_{99}}{\nu}, \end{equation}
where  $h_{99}$ is the mixing width based on 1–99 % mass fraction. Dimotakis (Reference Dimotakis2000) determined that the criterion for turbulent transition is when
$h_{99}$ is the mixing width based on 1–99 % mass fraction. Dimotakis (Reference Dimotakis2000) determined that the criterion for turbulent transition is when  $Re_T>100$ or
$Re_T>100$ or  $Re_L>10\,000$.
$Re_L>10\,000$.
3. Mathematical methods
3.1. Model problem
In this work, a two-dimensional (2-D), non-reacting flow with two species – a heavy fluid over a light fluid – is considered, with gravity pointing in the negative  $y$-direction. It must be noted that the behaviour of 2-D RTI is significantly different from three-dimensional (3-D) RTI, the latter of which is more relevant to problems of engineering interest. It is well known that while 2-D RTI is unsteady and chaotic, it is not strictly turbulent, since turbulence is a characteristic of 3-D flows. In addition, 2-D RTI has a faster late-time growth rate, develops larger structures, and is ultimately less well mixed. These differences have been studied in RTI by Cabot (Reference Cabot2006) and Young et al. (Reference Young, Tufo, Dubey and Rosner2001), and in Richtmyer–Meshkov instability by Olson & Greenough (Reference Olson and Greenough2014).
$y$-direction. It must be noted that the behaviour of 2-D RTI is significantly different from three-dimensional (3-D) RTI, the latter of which is more relevant to problems of engineering interest. It is well known that while 2-D RTI is unsteady and chaotic, it is not strictly turbulent, since turbulence is a characteristic of 3-D flows. In addition, 2-D RTI has a faster late-time growth rate, develops larger structures, and is ultimately less well mixed. These differences have been studied in RTI by Cabot (Reference Cabot2006) and Young et al. (Reference Young, Tufo, Dubey and Rosner2001), and in Richtmyer–Meshkov instability by Olson & Greenough (Reference Olson and Greenough2014).
For this study, 2-D RTI is chosen as the model problem instead of 3-D RTI, since it is a good simplified setting for understanding non-locality in RTI through the lens of the MFM. Specifically, 2-D RTI simulations are much less computationally expensive than those of 3-D RTI, and MFM requires many simulations to attain statistical convergence. Thus 2-D RTI remains the focus of this work, with the hope that the understanding of non-locality in this flow could be extended to non-locality in 3-D RTI.
In this 2-D problem,  $x$ is the homogeneous direction. In addition, there is no surface tension, the Atwood number and Mach number (
$x$ is the homogeneous direction. In addition, there is no surface tension, the Atwood number and Mach number ( $Ma$) are finite but small, and the Péclet number (
$Ma$) are finite but small, and the Péclet number ( $Pe$) is finite but large.
$Pe$) is finite but large.
3.2. Generalized eddy diffusivity and higher-order moments
In this work, the effect of non-locality on mean scalar transport is of interest, so analysis begins with the scalar transport equation under the assumption of incompressibility:
 \begin{equation} \frac{\partial Y_H}{\partial t} + \boldsymbol{\nabla}\boldsymbol{\cdot}(\boldsymbol{u}Y_H) = D_H\,\nabla^2Y_H, \end{equation}
\begin{equation} \frac{\partial Y_H}{\partial t} + \boldsymbol{\nabla}\boldsymbol{\cdot}(\boldsymbol{u}Y_H) = D_H\,\nabla^2Y_H, \end{equation}
where  $\boldsymbol {u}$ is the velocity vector, and
$\boldsymbol {u}$ is the velocity vector, and  $D_H$ is the molecular diffusivity of the heavy fluid.
$D_H$ is the molecular diffusivity of the heavy fluid.
After Reynolds decomposition and averaging, this becomes
 \begin{equation} \frac{\partial \langle Y_H \rangle }{\partial t} + \boldsymbol{\nabla}\boldsymbol{\cdot}(\langle{\boldsymbol{u}}\rangle\langle Y_H \rangle ) ={-}\frac{\partial\langle v'Y_H' \rangle }{\partial y} + D_H\,\nabla^2\langle Y_H \rangle . \end{equation}
\begin{equation} \frac{\partial \langle Y_H \rangle }{\partial t} + \boldsymbol{\nabla}\boldsymbol{\cdot}(\langle{\boldsymbol{u}}\rangle\langle Y_H \rangle ) ={-}\frac{\partial\langle v'Y_H' \rangle }{\partial y} + D_H\,\nabla^2\langle Y_H \rangle . \end{equation} In this work, large  $Pe$ (the ratio of advective transport rate to diffusive transport rate) and small
$Pe$ (the ratio of advective transport rate to diffusive transport rate) and small  $A$ are assumed. The former assumption means that molecular diffusion is negligible, and the latter yields
$A$ are assumed. The former assumption means that molecular diffusion is negligible, and the latter yields  $\langle u_i \rangle =0$, allowing the advective term to drop. Equation (3.2) becomes
$\langle u_i \rangle =0$, allowing the advective term to drop. Equation (3.2) becomes
 \begin{equation} \frac{\partial \langle Y_H \rangle }{\partial t} ={-}\frac{\partial\langle v'Y_H' \rangle }{\partial y}. \end{equation}
\begin{equation} \frac{\partial \langle Y_H \rangle }{\partial t} ={-}\frac{\partial\langle v'Y_H' \rangle }{\partial y}. \end{equation}
The term  $\langle v'Y_H' \rangle$ is the turbulent scalar flux, and this is the unclosed term that needs to be modelled.
$\langle v'Y_H' \rangle$ is the turbulent scalar flux, and this is the unclosed term that needs to be modelled.
As mentioned previously, one reason why the gradient diffusion approximation used to model this term is inaccurate is that it assumes locality of the eddy diffusivity. This assumption can be removed by instead considering a generalized eddy diffusivity that is non-local in space and time, as demonstrated by Romanof (Reference Romanof1985) and Kraichnan (Reference Kraichnan1987). For 2-D RTI, such a model reduces to
 \begin{equation} -\langle v'Y_H' \rangle (y,t) = \iint D(y,y',t,t') \left.\frac{\partial \langle Y_H \rangle }{\partial y}\right|_{y',t'} \,{{\rm d} y}' \,{\rm d}t'. \end{equation}
\begin{equation} -\langle v'Y_H' \rangle (y,t) = \iint D(y,y',t,t') \left.\frac{\partial \langle Y_H \rangle }{\partial y}\right|_{y',t'} \,{{\rm d} y}' \,{\rm d}t'. \end{equation}
Here,  $y$ is the spatial coordinate in averaged space,
$y$ is the spatial coordinate in averaged space,  $t$ is the time at which the turbulent scalar flux is measured,
$t$ is the time at which the turbulent scalar flux is measured,  $y'$ is all points in averaged space, and
$y'$ is all points in averaged space, and  $t'$ is all points in time. This definition is exact for passive scalar transport, including in the case studied in this work.
$t'$ is all points in time. This definition is exact for passive scalar transport, including in the case studied in this work.
This non-local eddy diffusivity can also be viewed as a two-point correlation. This was first described by Taylor (Reference Taylor1922) in homogeneous turbulence. Through Lagrangian statistical analysis, Taylor derived the following relation between diffusivity and velocity correlations:
 \begin{equation} D_{ij} = \int_0^\infty{ \left\langle v_i(t)\,v_j(t+t')\right\rangle \,{\rm d}t' }. \end{equation}
\begin{equation} D_{ij} = \int_0^\infty{ \left\langle v_i(t)\,v_j(t+t')\right\rangle \,{\rm d}t' }. \end{equation}Work by Shende, Storan & Mani (Reference Shende, Storan and Mani2023) has shown that the MFM recovers this Lagrangian formulation for eddy diffusivity in homogeneous flows. It should be noted that the above definition is not valid for inhomogeneous RTI (again, the exact definition of eddy diffusivity for the studied flow is the one in (3.4)), but the intent here is to provide another interpretation of the MFM that is more aligned with the well-understood two-point correlations.
The eddy diffusivity kernel can be approximated by Taylor-series-expanding the scalar gradient locally about  $y$ and
$y$ and  $t$, which results in the following Kramers–Moyal-like expansion for the turbulent scalar flux as done by Kraichnan (Reference Kraichnan1987) and Hamba (Reference Hamba1995, Reference Hamba2004):
$t$, which results in the following Kramers–Moyal-like expansion for the turbulent scalar flux as done by Kraichnan (Reference Kraichnan1987) and Hamba (Reference Hamba1995, Reference Hamba2004):
 \begin{gather} -\langle v'Y_H' \rangle
(y,t) = D^{00}(y,t)\,\frac{\partial \langle Y_H \rangle
}{\partial y} + D^{10}(y,t)\,\frac{\partial^2 \langle Y_H
\rangle }{\partial y^2}\nonumber\\ \quad +\, D^{01}(y,t)\,\frac{\partial^2
\langle Y_H \rangle }{\partial t \partial y} +
D^{20}(y,t)\,\frac{\partial^3 \langle Y_H \rangle
}{\partial y^3}+\cdots,
\end{gather}
\begin{gather} -\langle v'Y_H' \rangle
(y,t) = D^{00}(y,t)\,\frac{\partial \langle Y_H \rangle
}{\partial y} + D^{10}(y,t)\,\frac{\partial^2 \langle Y_H
\rangle }{\partial y^2}\nonumber\\ \quad +\, D^{01}(y,t)\,\frac{\partial^2
\langle Y_H \rangle }{\partial t \partial y} +
D^{20}(y,t)\,\frac{\partial^3 \langle Y_H \rangle
}{\partial y^3}+\cdots,
\end{gather} \begin{gather}D^{00}(y,t) = \iint D(y,y',t,t')\,{{\rm d} y}' \,{\rm d}t', \end{gather}
\begin{gather}D^{00}(y,t) = \iint D(y,y',t,t')\,{{\rm d} y}' \,{\rm d}t', \end{gather} \begin{gather}D^{10}(y,t) = \iint (y'-y)\,D(y,y',t,t')\,{{\rm d} y}' \,{\rm d}t', \end{gather}
\begin{gather}D^{10}(y,t) = \iint (y'-y)\,D(y,y',t,t')\,{{\rm d} y}' \,{\rm d}t', \end{gather} \begin{gather}D^{01}(y,t) = \iint (t'-t)\,D(y,y',t,t')\,{{\rm d} y}' \,{\rm d}t', \end{gather}
\begin{gather}D^{01}(y,t) = \iint (t'-t)\,D(y,y',t,t')\,{{\rm d} y}' \,{\rm d}t', \end{gather} \begin{gather}D^{20}(y,t) = \iint \frac{(y'-y)^2}{2}\,D(y,y',t,t')\,{{\rm d}y}'\, {\rm d}t'. \end{gather}
\begin{gather}D^{20}(y,t) = \iint \frac{(y'-y)^2}{2}\,D(y,y',t,t')\,{{\rm d}y}'\, {\rm d}t'. \end{gather}
Here,  $D^{mn}$ are the eddy diffusivity moments; the first index,
$D^{mn}$ are the eddy diffusivity moments; the first index,  $m$, denotes order in space, while the second,
$m$, denotes order in space, while the second,  $n$, denotes order in time. This is the form presented in Mani & Park (Reference Mani and Park2021) and Liu, Williams & Mani (Reference Liu, Williams and Mani2023).
$n$, denotes order in time. This is the form presented in Mani & Park (Reference Mani and Park2021) and Liu, Williams & Mani (Reference Liu, Williams and Mani2023).
When the eddy diffusivity kernel is purely local,
 \begin{equation} D(y,y',t,t')=D^{00}\,\delta(y-y')\,\delta(t-t'). \end{equation}
\begin{equation} D(y,y',t,t')=D^{00}\,\delta(y-y')\,\delta(t-t'). \end{equation}
In this case,  $D^{00}$ is the only surviving moment, while all higher-order moments in space and time are zero. Any non-zero higher-order moment therefore characterizes the non-locality of the eddy diffusivity kernel. Thus this expansion implies explicitly a model form for the turbulent scalar flux that incorporates non-locality of the eddy diffusivity. Truncating the expansion provides an approximation of
$D^{00}$ is the only surviving moment, while all higher-order moments in space and time are zero. Any non-zero higher-order moment therefore characterizes the non-locality of the eddy diffusivity kernel. Thus this expansion implies explicitly a model form for the turbulent scalar flux that incorporates non-locality of the eddy diffusivity. Truncating the expansion provides an approximation of  $\langle v'Y_H' \rangle$, but with the caveat that the expansion may not converge. This will be discussed in more detail in § 5.3.1.
$\langle v'Y_H' \rangle$, but with the caveat that the expansion may not converge. This will be discussed in more detail in § 5.3.1.
Each  $D^{mn}$ provides more information about the eddy diffusivity kernel with increasing order. For example,
$D^{mn}$ provides more information about the eddy diffusivity kernel with increasing order. For example,  $D^{00}$ represents the volume of the kernel in space–time. The coefficient corresponding to one higher order in space,
$D^{00}$ represents the volume of the kernel in space–time. The coefficient corresponding to one higher order in space,  $D^{10}$, provides information about the centroid of the kernel in space. Then
$D^{10}$, provides information about the centroid of the kernel in space. Then  $D^{20}$ contains information about the moment of inertia of the kernel in space,
$D^{20}$ contains information about the moment of inertia of the kernel in space,  $D^{01}$ contains information about the centroid of the kernel in time, and so on.
$D^{01}$ contains information about the centroid of the kernel in time, and so on.
3.3. The macroscopic forcing method
MFM is a method for numerically determining closure operators in turbulent flows (Mani & Park Reference Mani and Park2021). Much like a rheometer measures the molecular viscosity of a fluid by imposing a shear force on the flow, MFM forces the transport equation in a turbulent flow and extracts the closure operator from its response. Unlike the molecular viscosity, which is a material property, the turbulent closure operator is a property of the flow, so MFM measurements of one flow cannot be generalized for all flows; the MFM-measured closure for one flow cannot be applied exactly as it is to a different flow. However, MFM measurements of one flow can reveal characteristics of the turbulent closure that are expected be true for a family of similar flows.
Specifically, MFM can be used to determine the RANS closure operator, as shown in the pipeline diagram in figure 1. In MFM, two simulations are run at once: the donor and receiver simulations. In this work, the donor simulation numerically solves the multicomponent Navier–Stokes equations in (4.1)–(4.4). The receiver simulation ‘receives’  $u_i$ from the donor simulation, and uses it to solve the scalar transport equation with a forcing
$u_i$ from the donor simulation, and uses it to solve the scalar transport equation with a forcing  $s$:
$s$:
 \begin{equation} \rho\,\frac{\partial Y_H}{\partial t} + \rho\,\frac{\partial}{\partial x_i}\left(u_iY_H\right)= \frac{\partial}{\partial x_i}\left(\rho D_H\,\frac{\partial}{\partial x_i}Y_H\right) + s. \end{equation}
\begin{equation} \rho\,\frac{\partial Y_H}{\partial t} + \rho\,\frac{\partial}{\partial x_i}\left(u_iY_H\right)= \frac{\partial}{\partial x_i}\left(\rho D_H\,\frac{\partial}{\partial x_i}Y_H\right) + s. \end{equation}
Ultimately, forcings on the receiver simulation effect a response from the flow, and measuring this response allows for determination of the eddy diffusivity. In particular, these forcings are macroscopic. Here, macroscopic quantities are defined as fields that are unchanged by Reynolds averaging. Mathematically, the macroscopic forcing is such that  $s=\bar {s}$. This macroscopic nature is crucial to the method, since it does not disturb the underlying mixing process, which allows for measurement of the closure operator without changing it. For details, see Mani & Park (Reference Mani and Park2021).
$s=\bar {s}$. This macroscopic nature is crucial to the method, since it does not disturb the underlying mixing process, which allows for measurement of the closure operator without changing it. For details, see Mani & Park (Reference Mani and Park2021).

Figure 1. Diagram of the MFM pipeline.
In actuality, the inverse MFM is used to determine eddy diffusivity moments. That is, instead of the forcings being chosen, certain mean mass fraction fields are chosen. Numerically, mean mass fractions are enforced in each realization, so the averages (denoted by  $\bar {*}$) described here are in
$\bar {*}$) described here are in  $x$, the homogeneous direction in space. The forcing needed to maintain the chosen
$x$, the homogeneous direction in space. The forcing needed to maintain the chosen  $\overline {Y_H}$ is determined implicitly along the process, and is not used directly in the analysis.
$\overline {Y_H}$ is determined implicitly along the process, and is not used directly in the analysis.
As an illustration, the measurement of  $D^{00}$ can be considered. According to (3.6), choosing
$D^{00}$ can be considered. According to (3.6), choosing  $\overline {Y_H} =y$ (for
$\overline {Y_H} =y$ (for  $y$ between
$y$ between  $-1/2$ and
$-1/2$ and  $1/2$) results in
$1/2$) results in  ${\partial \overline {Y_H} }/{\partial y}=1$, and all other higher-order derivatives are zero. Thus choosing this
${\partial \overline {Y_H} }/{\partial y}=1$, and all other higher-order derivatives are zero. Thus choosing this  $\overline {Y_H}$ in each realization results in the realization-averaged and spatially averaged measurement
$\overline {Y_H}$ in each realization results in the realization-averaged and spatially averaged measurement  $-\langle v'Y_H' \rangle =D^{00}$.
$-\langle v'Y_H' \rangle =D^{00}$.
Measurement of higher-order moments involves similar choices of  $\overline {Y_H}$ but requires information from lower-order moments. For example, measuring
$\overline {Y_H}$ but requires information from lower-order moments. For example, measuring  $D^{10}$ involves choosing
$D^{10}$ involves choosing  $\overline {Y_H} =y^2$, which results in
$\overline {Y_H} =y^2$, which results in  $-\langle v'Y_H' \rangle =yD^{00}+D^{10}$. Here,
$-\langle v'Y_H' \rangle =yD^{00}+D^{10}$. Here,  $D^{00}$ comes from the simulation using
$D^{00}$ comes from the simulation using  $\overline {Y_H} =y$. Thus
$\overline {Y_H} =y$. Thus  $D^{10}$ is computed by subtracting
$D^{10}$ is computed by subtracting  $yD^{00}$ from the
$yD^{00}$ from the  $\langle v'Y_H' \rangle$ measurement from the simulation using
$\langle v'Y_H' \rangle$ measurement from the simulation using  $\overline {Y_H} =y^2$.
$\overline {Y_H} =y^2$.
Specifically, the following desired mean mass fractions are used for each moment for  $y$ between
$y$ between  $-1/2$ and
$-1/2$ and  $1/2$:
$1/2$:
 \begin{gather} \overline{Y_H} =y \Rightarrow D^{00}, \end{gather}
\begin{gather} \overline{Y_H} =y \Rightarrow D^{00}, \end{gather} \begin{gather}\overline{Y_H} =\tfrac{1}{2}y^2 \Rightarrow D^{10}, \end{gather}
\begin{gather}\overline{Y_H} =\tfrac{1}{2}y^2 \Rightarrow D^{10}, \end{gather} \begin{gather}\overline{Y_H} =yt \Rightarrow D^{01}, \end{gather}
\begin{gather}\overline{Y_H} =yt \Rightarrow D^{01}, \end{gather} \begin{gather}\overline{Y_H} =\tfrac{1}{6}y^3+\tfrac{1}{48} \Rightarrow D^{20}. \end{gather}
\begin{gather}\overline{Y_H} =\tfrac{1}{6}y^3+\tfrac{1}{48} \Rightarrow D^{20}. \end{gather}
From these  $\overline {Y_H}$, the needed forcing in each time step is determined numerically:
$\overline {Y_H}$, the needed forcing in each time step is determined numerically:
 \begin{equation} s^k = \frac{\overline{Y_H} _{desired}^k - \overline{Y_H} ^{k-1}}{\Delta t}, \end{equation}
\begin{equation} s^k = \frac{\overline{Y_H} _{desired}^k - \overline{Y_H} ^{k-1}}{\Delta t}, \end{equation}
where the superscript  $k$ denotes the time step number,
$k$ denotes the time step number,  $\overline {Y_H} _{desired}$ is the mean mass fraction desired as outlined in (3.13)–(3.16), and
$\overline {Y_H} _{desired}$ is the mean mass fraction desired as outlined in (3.13)–(3.16), and  $\Delta t$ is the time step size.
$\Delta t$ is the time step size.
This MFM forcing bears some resemblance to other forcings used in the literature, such as interaction by exchange with the mean (IEM) (Pope Reference Pope2001; Sawford Reference Sawford2004). One main difference between forcings in such methods and MFM is that the purpose of the latter is to drive the flow to a specified mean gradient, which allows for measurement – not enforcement – of the eddy diffusivity moments. In other words, in MFM for scalar transport, the input is a mean scalar gradient, and the output is the eddy diffusivity moment; in IEM and similar methods, the input is a desired moment (e.g. in IEM, the input moment is  $\langle c^2\rangle$) and the output is a mixing model. In addition, methods such as IEM use microscopic forcings, while MFM uses macroscopic forcings, which is a distinguishing characteristic of the latter method.
$\langle c^2\rangle$) and the output is a mixing model. In addition, methods such as IEM use microscopic forcings, while MFM uses macroscopic forcings, which is a distinguishing characteristic of the latter method.
To determine  $D^{00}$,
$D^{00}$,  $D^{10}$,
$D^{10}$,  $D^{01}$ and
$D^{01}$ and  $D^{20}$, four separate simulations are needed. For each of these simulations, the moments can be calculated using measurements of the turbulent scalar flux as follows:
$D^{20}$, four separate simulations are needed. For each of these simulations, the moments can be calculated using measurements of the turbulent scalar flux as follows:
 \begin{gather} D^{00}=F^{00}, \end{gather}
\begin{gather} D^{00}=F^{00}, \end{gather} \begin{gather}D^{10}=F^{10}-yD^{00}, \end{gather}
\begin{gather}D^{10}=F^{10}-yD^{00}, \end{gather} \begin{gather}D^{01}=F^{01}-tD^{00}, \end{gather}
\begin{gather}D^{01}=F^{01}-tD^{00}, \end{gather} \begin{gather}D^{20}=F^{20}-yD^{10}-\tfrac{1}{2}y^2D^{00}, \end{gather}
\begin{gather}D^{20}=F^{20}-yD^{10}-\tfrac{1}{2}y^2D^{00}, \end{gather}
where  $F^{mn}$ denotes the
$F^{mn}$ denotes the  $-\langle v'Y_H' \rangle$ measured from the receiver simulation using the forcing corresponding to the moment
$-\langle v'Y_H' \rangle$ measured from the receiver simulation using the forcing corresponding to the moment  $D^{mn}$.
$D^{mn}$.
3.4. Self-similarity analysis
We perform our analysis in the self-similar regime. First, we define a self-similar coordinate:
 \begin{equation} \eta = \frac{y}{h(t)}, \end{equation}
\begin{equation} \eta = \frac{y}{h(t)}, \end{equation}
so that  $\langle Y_H \rangle$ is a function of only
$\langle Y_H \rangle$ is a function of only  $\eta$. Note that
$\eta$. Note that  $\eta$ requires a definition of
$\eta$ requires a definition of  $h(t)$. From the previous discussion on the self-similarity of RTI, an appropriate definition is
$h(t)$. From the previous discussion on the self-similarity of RTI, an appropriate definition is  $h(t)=\alpha Agt^2$.
$h(t)=\alpha Agt^2$.
Through self-similar analysis of (3.6), the eddy diffusivity moments and turbulent scalar flux can be normalized. Details of this process can be found in Appendix A.
3.5. Algebraic fit to mixing width
Recall that  $h(t)=\alpha Agt^2$ is used in the self-similarity analysis. This is valid only for late time, so the subsequent analyses in this work are all done in this self-similar time frame. Usually,
$h(t)=\alpha Agt^2$ is used in the self-similarity analysis. This is valid only for late time, so the subsequent analyses in this work are all done in this self-similar time frame. Usually,  $\alpha$ can be determined from
$\alpha$ can be determined from  ${h(t)}/{Agt^2}$, where
${h(t)}/{Agt^2}$, where  $h(t)$ is computed from the simulation via (2.5). However, due to the convergence and statistical errors as well as the existence of a virtual time origin,
$h(t)$ is computed from the simulation via (2.5). However, due to the convergence and statistical errors as well as the existence of a virtual time origin,  $\alpha Agt^2$ is not a good representation of
$\alpha Agt^2$ is not a good representation of  $h(t)$ measured in the DNS. Instead, a fitting coefficient
$h(t)$ measured in the DNS. Instead, a fitting coefficient  $\alpha ^*$ and virtual time origin
$\alpha ^*$ and virtual time origin  $t^*$ are determined to make a shifted quadratic fit to
$t^*$ are determined to make a shifted quadratic fit to  $h(t)$ from the simulation:
$h(t)$ from the simulation:
 \begin{equation} h_{fit}(t)=\alpha^*Ag(t-t^*)^2. \end{equation}
\begin{equation} h_{fit}(t)=\alpha^*Ag(t-t^*)^2. \end{equation}With this fit, the normalizations of the turbulent scalar flux and moments become
 \begin{gather} \widehat{\langle v'Y_H' \rangle }=\frac{\langle v'Y_H' \rangle }{\alpha^* Ag(t-t^*)}, \end{gather}
\begin{gather} \widehat{\langle v'Y_H' \rangle }=\frac{\langle v'Y_H' \rangle }{\alpha^* Ag(t-t^*)}, \end{gather} \begin{gather}\widehat{D^{00}}=\frac{D^{00}}{{\alpha^*}^2 A^2g^2(t-t^*)^3}, \end{gather}
\begin{gather}\widehat{D^{00}}=\frac{D^{00}}{{\alpha^*}^2 A^2g^2(t-t^*)^3}, \end{gather} \begin{gather}\widehat{D^{10}}=\frac{D^{10}}{{\alpha^*}^3 A^3g^3(t-t^*)^5}, \end{gather}
\begin{gather}\widehat{D^{10}}=\frac{D^{10}}{{\alpha^*}^3 A^3g^3(t-t^*)^5}, \end{gather} \begin{gather}\widehat{D^{01}}=\frac{D^{01}}{{\alpha^*}^2 A^2g^2(t-t^*)^4}, \end{gather}
\begin{gather}\widehat{D^{01}}=\frac{D^{01}}{{\alpha^*}^2 A^2g^2(t-t^*)^4}, \end{gather} \begin{gather}\widehat{D^{20}}=\frac{D^{20}}{{\alpha^*}^4 A^4g^4(t-t^*)^7}. \end{gather}
\begin{gather}\widehat{D^{20}}=\frac{D^{20}}{{\alpha^*}^4 A^4g^4(t-t^*)^7}. \end{gather} For exact self-similarity, plots of the measured  $\widehat {D^{mn}}$ against
$\widehat {D^{mn}}$ against  $\eta$ must be independent of time. This expectation sets a criterion to assess the extent to which ideal self-similarity is achieved. Plots and assessment of the self-similar collapse of the measurements presented in this work are in Appendix A.
$\eta$ must be independent of time. This expectation sets a criterion to assess the extent to which ideal self-similarity is achieved. Plots and assessment of the self-similar collapse of the measurements presented in this work are in Appendix A.
4. Simulation details
4.1. Governing equations
The governing equations solved in this work are the compressible multicomponent Navier–Stokes equations, which involve equations for continuity, diffusion of mass fraction  $Y_\alpha$ of species
$Y_\alpha$ of species  $\alpha$ (characterized by its binary molecular diffusivity
$\alpha$ (characterized by its binary molecular diffusivity  $D_\alpha$), momentum transport, and transport of specific internal energy
$D_\alpha$), momentum transport, and transport of specific internal energy  $e$:
$e$:
 \begin{gather} \frac{{\rm D}\rho}{{\rm D}t}={-}\rho\,\frac{\partial u_i}{\partial x_i}, \end{gather}
\begin{gather} \frac{{\rm D}\rho}{{\rm D}t}={-}\rho\,\frac{\partial u_i}{\partial x_i}, \end{gather} \begin{gather}\rho\,\frac{{\rm D}Y_\alpha}{{\rm D}t}=\frac{\partial }{\partial x_i}\left(\rho D_\alpha\,\frac{\partial Y_\alpha}{\partial x_i}\right), \end{gather}
\begin{gather}\rho\,\frac{{\rm D}Y_\alpha}{{\rm D}t}=\frac{\partial }{\partial x_i}\left(\rho D_\alpha\,\frac{\partial Y_\alpha}{\partial x_i}\right), \end{gather} \begin{gather}\rho\,\frac{{\rm D}u_j}{{\rm D}t}={-}\frac{\partial }{\partial x_i}\left(p\delta_{ij}+\sigma_{ij}\right) + {\rho g_j,} \end{gather}
\begin{gather}\rho\,\frac{{\rm D}u_j}{{\rm D}t}={-}\frac{\partial }{\partial x_i}\left(p\delta_{ij}+\sigma_{ij}\right) + {\rho g_j,} \end{gather} \begin{gather}\rho\,\frac{{\rm D}e}{{\rm D}t}={-}p\,\frac{\partial u_i}{\partial x_i}+\frac{\partial }{\partial x_i}\left(u_i\sigma_{ij}-q_j\right). \end{gather}
\begin{gather}\rho\,\frac{{\rm D}e}{{\rm D}t}={-}p\,\frac{\partial u_i}{\partial x_i}+\frac{\partial }{\partial x_i}\left(u_i\sigma_{ij}-q_j\right). \end{gather}
Here,  ${{\rm D}}/{{\rm D}t}$ is the material derivative
${{\rm D}}/{{\rm D}t}$ is the material derivative  ${\partial }/{\partial t} + u_i({\partial }/{\partial x_i})$,
${\partial }/{\partial t} + u_i({\partial }/{\partial x_i})$,  $\rho$ is density,
$\rho$ is density,  $u$ is velocity,
$u$ is velocity,  $p$ is pressure, and
$p$ is pressure, and  $g$ is gravitational acceleration, active in the
$g$ is gravitational acceleration, active in the  $-y$ direction. The viscous stress tensor
$-y$ direction. The viscous stress tensor  $\sigma _{ij}$ and heat flux vector
$\sigma _{ij}$ and heat flux vector  $q_j$ are respectively defined as
$q_j$ are respectively defined as
 \begin{gather} \sigma_{ij} = \mu\left(\frac{\partial u_i}{\partial x_j}+\frac{\partial u_j}{\partial x_i}\right)-\mu\,\frac{2}{3}\,\frac{\partial u_k}{\partial x_k}\,\delta_{ij}, \end{gather}
\begin{gather} \sigma_{ij} = \mu\left(\frac{\partial u_i}{\partial x_j}+\frac{\partial u_j}{\partial x_i}\right)-\mu\,\frac{2}{3}\,\frac{\partial u_k}{\partial x_k}\,\delta_{ij}, \end{gather} \begin{gather}q_j ={-}\kappa\,\frac{\partial T}{\partial x_j} - \sum^N_{\alpha=1}h_\alpha\rho D_\alpha\,\frac{\partial Y_\alpha}{\partial x_j}. \end{gather}
\begin{gather}q_j ={-}\kappa\,\frac{\partial T}{\partial x_j} - \sum^N_{\alpha=1}h_\alpha\rho D_\alpha\,\frac{\partial Y_\alpha}{\partial x_j}. \end{gather}
Here,  $\mu$ is the dynamic viscosity,
$\mu$ is the dynamic viscosity,  $\kappa$ is the thermal conductivity,
$\kappa$ is the thermal conductivity,  $T$ is temperature, and
$T$ is temperature, and  $h_\alpha$ is the specific enthalpy of species
$h_\alpha$ is the specific enthalpy of species  $\alpha$.
$\alpha$.
Component pressures and temperatures of each species are determined using ideal gas equations of state. Under the assumption of pressure and temperature equilibrium, an iterative process is performed to determine volume fractions  $v_\alpha$ that allow for computation of partial densities and energies. More details on the hydrodynamics equations and computation of component quantities can be found in Morgan et al. (Reference Morgan, Olson, Black and McFarland2018).
$v_\alpha$ that allow for computation of partial densities and energies. More details on the hydrodynamics equations and computation of component quantities can be found in Morgan et al. (Reference Morgan, Olson, Black and McFarland2018).
Finally, total pressure is determined as the weighted sum of component pressures:
 \begin{equation} p=\sum^N_{\alpha=1}v_\alpha p_\alpha. \end{equation}
\begin{equation} p=\sum^N_{\alpha=1}v_\alpha p_\alpha. \end{equation} In general, in these compressible equations,  $Y_\alpha$ are not passive scalars. However, the component equations of state are scaled so that a consistent hydrostatic pressure gradient is maintained across the mixing layer. Thus, in this work,
$Y_\alpha$ are not passive scalars. However, the component equations of state are scaled so that a consistent hydrostatic pressure gradient is maintained across the mixing layer. Thus, in this work,  $Y_\alpha$ are effectively passive.
$Y_\alpha$ are effectively passive.
4.2. Computational approach
Simulations for 2-D RTI are run using the Ares code, a hydrodynamics solver developed at Lawrence Livermore National Laboratory (Morgan & Greenough Reference Morgan and Greenough2015; Bender et al. Reference Bender2021). Ares employs an arbitrary Lagrangian–Eulerian method based on the one by Sharp & Barton (Reference Sharp and Barton1981), in which the governing equations ((4.1)–(4.4)) are solved in a Lagrangian frame and then remapped to an Eulerian mesh through a second-order scheme. The spatial discretization is a second-order non-dissipative finite element method, and time advancement is a second-order explicit predictor–corrector scheme.
The Reynolds number (more specifically, the kinematic viscosity  $\nu$) is set through a numerical Grashof number, such that
$\nu$) is set through a numerical Grashof number, such that
 \begin{equation} \nu = \sqrt{ \frac{-2gA\varDelta^3}{Gr}}. \end{equation}
\begin{equation} \nu = \sqrt{ \frac{-2gA\varDelta^3}{Gr}}. \end{equation}
Here,  $\varDelta$ is the grid spacing; in the simulations, a uniform mesh is used, and
$\varDelta$ is the grid spacing; in the simulations, a uniform mesh is used, and  $\varDelta =\Delta x=\Delta y$. To ensure that the unsteady structures are properly resolved and for the simulation to appropriately be considered DNS,
$\varDelta =\Delta x=\Delta y$. To ensure that the unsteady structures are properly resolved and for the simulation to appropriately be considered DNS,  $Gr$ should be kept small. A
$Gr$ should be kept small. A  $Gr$ that is too large results in a simulation with dissipation dominated by numerics rather than the physics. Morgan & Black (Reference Morgan and Black2020) found that past
$Gr$ that is too large results in a simulation with dissipation dominated by numerics rather than the physics. Morgan & Black (Reference Morgan and Black2020) found that past  $Gr\approx 12$ in the Ares code, numerical diffusivity dominates molecular diffusivity. For our simulations, we use
$Gr\approx 12$ in the Ares code, numerical diffusivity dominates molecular diffusivity. For our simulations, we use  $A=0.05$ and
$A=0.05$ and  $Gr=1$, the latter of which is in line with the DNS by Cabot & Cook (Reference Cabot and Cook2006). These choices give
$Gr=1$, the latter of which is in line with the DNS by Cabot & Cook (Reference Cabot and Cook2006). These choices give  $\nu =10^{-9} \,{\rm m}^2\,{\rm s}^{-1}$. The Schmidt number
$\nu =10^{-9} \,{\rm m}^2\,{\rm s}^{-1}$. The Schmidt number  $Sc$, defined as
$Sc$, defined as  $\nu /D_M$, is set to unity, so
$\nu /D_M$, is set to unity, so  $D_M=10^{-9} \,{\rm m}^2\,{\rm s}^{-1}$.
$D_M=10^{-9} \,{\rm m}^2\,{\rm s}^{-1}$.
The Mach number  $Ma={u}/{c}$, where
$Ma={u}/{c}$, where  $c$ is the speed of sound, characterizes compressibility effects of the flow, and is set by the specific heat ratio
$c$ is the speed of sound, characterizes compressibility effects of the flow, and is set by the specific heat ratio  $\gamma$, which is
$\gamma$, which is  $5/3$ in the simulations in this work. The maximum
$5/3$ in the simulations in this work. The maximum  $Ma$ is measured at the last time step to be approximately
$Ma$ is measured at the last time step to be approximately  $0.03$, which is ascertained to be small enough to assume incompressibility.
$0.03$, which is ascertained to be small enough to assume incompressibility.
The Péclet number  $Pe$ characterizes the advection versus diffusion rate and is defined as
$Pe$ characterizes the advection versus diffusion rate and is defined as  $Re\,Sc$. Here,
$Re\,Sc$. Here,  $Pe_L$ and
$Pe_L$ and  $Pe_T$ are reported, which use a large-scale
$Pe_T$ are reported, which use a large-scale  $Re_L$ and the Taylor Reynolds number
$Re_L$ and the Taylor Reynolds number  $Re_T$, respectively. In the presented simulations,
$Re_T$, respectively. In the presented simulations,  $Sc=1$. The two
$Sc=1$. The two  $Pe$ values are computed in post-processing:
$Pe$ values are computed in post-processing:  $Pe_L$ is approximately
$Pe_L$ is approximately  $8000$, and
$8000$, and  $Pe_T$ is approximately
$Pe_T$ is approximately  $54$. Both are below the criterion established by Dimotakis (Reference Dimotakis2000), suggesting that the simulated flow is transitional or pre-transitional.
$54$. Both are below the criterion established by Dimotakis (Reference Dimotakis2000), suggesting that the simulated flow is transitional or pre-transitional.
The number of cells in each simulation is  $2049\times 2049$. The width
$2049\times 2049$. The width  $L_x$ of the domain is
$L_x$ of the domain is  $1$, and the height
$1$, and the height  $L_y$ is
$L_y$ is  $1$. The boundary conditions are periodic in
$1$. The boundary conditions are periodic in  $x$ and no slip and no penetration in
$x$ and no slip and no penetration in  $y$.
$y$.
Initially, the velocity field is zero, temperature is 293.15 K, and pressure is 1 atm. A top-hat perturbation based on the ones used by Morgan & Greenough (Reference Morgan and Greenough2015) and Morgan (Reference Morgan2022) is imposed on the density field at the interface of the heavy and light fluids:
 \begin{gather} \xi(x) = \sum^{\kappa_{max}}_{k=\kappa_{min}} \frac{\varDelta}{\kappa_{max}-\kappa_{min}+1} \left(\cos\left(2{\rm \pi} k x+\phi_{1,k}\right) +\sin\left(2{\rm \pi} k x+\phi_{2,k}\right)\right), \end{gather}
\begin{gather} \xi(x) = \sum^{\kappa_{max}}_{k=\kappa_{min}} \frac{\varDelta}{\kappa_{max}-\kappa_{min}+1} \left(\cos\left(2{\rm \pi} k x+\phi_{1,k}\right) +\sin\left(2{\rm \pi} k x+\phi_{2,k}\right)\right), \end{gather} \begin{gather}\rho(x,y) = \rho_L+ \frac{\rho_H-\rho_L}{2}\left(1+\tanh\left(\frac{y-L_y/2+\xi}{2\varDelta}\right)\right), \end{gather}
\begin{gather}\rho(x,y) = \rho_L+ \frac{\rho_H-\rho_L}{2}\left(1+\tanh\left(\frac{y-L_y/2+\xi}{2\varDelta}\right)\right), \end{gather}
where  $\phi _{1,k}$ and
$\phi _{1,k}$ and  $\phi _{2,k}$ are phase shift vectors taken randomly from a uniform distribution, and
$\phi _{2,k}$ are phase shift vectors taken randomly from a uniform distribution, and  $L_y$ is the length in
$L_y$ is the length in  $y$ of the domain. Here, the minimum and maximum wavenumbers are set to
$y$ of the domain. Here, the minimum and maximum wavenumbers are set to  $\kappa _{min}=8$ and
$\kappa _{min}=8$ and  $\kappa _{max}=256$, respectively.
$\kappa _{max}=256$, respectively.
The stop condition of the simulations is when  $h$ is approximately half the domain size in
$h$ is approximately half the domain size in  $y$. This corresponds to the non-dimensional simulation time
$y$. This corresponds to the non-dimensional simulation time  $\tau$ of
$\tau$ of  $30.84$. Here,
$30.84$. Here,  $\tau$ is defined as
$\tau$ is defined as  ${t}/{t_0}$, where
${t}/{t_0}$, where  $t_0=\sqrt {{h_0}/{Ag}}$, and
$t_0=\sqrt {{h_0}/{Ag}}$, and  $h_0$ is the dominant length scale determined by the peak of the initial perturbation spectrum.
$h_0$ is the dominant length scale determined by the peak of the initial perturbation spectrum.
Before MFM analysis was conducted, the results of the donor simulations were examined. In figure 2(a), mixedness is observed to reach a value of approximately  $0.6$, but appears not to have converged yet. Figure 2(b) shows the two definitions of
$0.6$, but appears not to have converged yet. Figure 2(b) shows the two definitions of  $\alpha$ over time. The first definition,
$\alpha$ over time. The first definition,  $\alpha =h/Agt^2$, reaches a value of about
$\alpha =h/Agt^2$, reaches a value of about  $0.05$ by the end of the simulation, but it does not appear to be converged. The second definition,
$0.05$ by the end of the simulation, but it does not appear to be converged. The second definition,  $\alpha =\dot {h}^2/4Agh$, is oscillatory, due to the sensitivity of the time derivative to noise, and it appears to fluctuate about a value of approximately
$\alpha =\dot {h}^2/4Agh$, is oscillatory, due to the sensitivity of the time derivative to noise, and it appears to fluctuate about a value of approximately  $0.04$. It is acknowledged that this behaviour indicates that the RTI simulated here is only weakly turbulent. However, it is observed that the flow is still self-similar at late times. The contour plot of
$0.04$. It is acknowledged that this behaviour indicates that the RTI simulated here is only weakly turbulent. However, it is observed that the flow is still self-similar at late times. The contour plot of  $\langle Y_H \rangle$ in figure 3 exhibits parallel contour lines after
$\langle Y_H \rangle$ in figure 3 exhibits parallel contour lines after  $\tau \approx 17$, indicating self-similarity at those times. It is also shown in Appendix A that the mean concentration and normalized turbulent scalar flux profiles exhibit self-similar collapse after
$\tau \approx 17$, indicating self-similarity at those times. It is also shown in Appendix A that the mean concentration and normalized turbulent scalar flux profiles exhibit self-similar collapse after  $\tau \approx 17$, so the presented self-similar analysis is valid.
$\tau \approx 17$, so the presented self-similar analysis is valid.

Figure 2. Self-similarity parameters computed from a donor simulation.

Figure 3. Contours of  $\langle Y_H \rangle$ showing self-similarity at late times.
$\langle Y_H \rangle$ showing self-similarity at late times.
Figure 4 shows a plot of the algebraic fit for  $h$, described in (3.23). For the simulations presented here,
$h$, described in (3.23). For the simulations presented here,  $\alpha ^*$ is
$\alpha ^*$ is  $0.0046$, and
$0.0046$, and  $t^*$ is
$t^*$ is  $-1.6\times 10^3$. The plot shows a strong quadratic dependence of
$-1.6\times 10^3$. The plot shows a strong quadratic dependence of  $h$ on
$h$ on  $t$ at late time, as
$t$ at late time, as  $h_{fit}$ matches DNS at
$h_{fit}$ matches DNS at  $\tau \gtrapprox 17$, validating the self-similar ansatz of
$\tau \gtrapprox 17$, validating the self-similar ansatz of  $h\sim t^2$.
$h\sim t^2$.

Figure 4. Black solid line indicates  $h$ measured from DNS; red dashed line indicates
$h$ measured from DNS; red dashed line indicates  $h_{fit}$.
$h_{fit}$.
To further ensure that the simulations are working as desired, the flow fields of the donor and receiver simulations can be examined qualitatively. The  $Y_H$ contours at the last time steps of each simulation are shown in figure 5. The receiver simulation shown is the one used to compute
$Y_H$ contours at the last time steps of each simulation are shown in figure 5. The receiver simulation shown is the one used to compute  $D^{00}$ (where
$D^{00}$ (where  $\langle Y_H \rangle =y$). Self-similar RTI turbulent mixing is observed at this time step, where the characteristic heavy spikes are sinking into the lighter fluid, and the light bubbles rise into the heavier fluid. Both simulations have the same velocity fields, since the receiver simulation ‘receives’ the velocity field from the donor simulation. In contrast with the donor simulation, which has a stark black-and-white difference between the heavy and light fluids, there is a grey gradient of density in the receiver simulation due to the imposed mean scalar gradient. The fluctuations of
$\langle Y_H \rangle =y$). Self-similar RTI turbulent mixing is observed at this time step, where the characteristic heavy spikes are sinking into the lighter fluid, and the light bubbles rise into the heavier fluid. Both simulations have the same velocity fields, since the receiver simulation ‘receives’ the velocity field from the donor simulation. In contrast with the donor simulation, which has a stark black-and-white difference between the heavy and light fluids, there is a grey gradient of density in the receiver simulation due to the imposed mean scalar gradient. The fluctuations of  $Y_H$ in each simulation are also compared in figure 6. The
$Y_H$ in each simulation are also compared in figure 6. The  $Y_H'$ contours are not identical but are qualitatively very similar. In both simulations,
$Y_H'$ contours are not identical but are qualitatively very similar. In both simulations,  $Y_H'$ is constrained to the mixing layer. Based on these observations, it is concluded that the simulations are visually working as intended.
$Y_H'$ is constrained to the mixing layer. Based on these observations, it is concluded that the simulations are visually working as intended.

Figure 5. Contours of  $Y_H$ (black indicates light, white indicates heavy) and velocity vector fields (red arrows) for (a) the donor simulation and (b) the receiver simulation with
$Y_H$ (black indicates light, white indicates heavy) and velocity vector fields (red arrows) for (a) the donor simulation and (b) the receiver simulation with  $s$ enforcing
$s$ enforcing  $\langle Y_H \rangle =y$. These snapshots are taken at the last time step.
$\langle Y_H \rangle =y$. These snapshots are taken at the last time step.

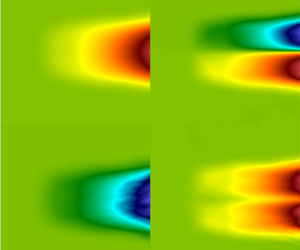
Figure 6. Contours of  $Y_H'$ for (a) the donor simulation and (b) the receiver simulation. These snapshots are taken at the last time step. Note that different colour bars have been used to improve interpretability.
$Y_H'$ for (a) the donor simulation and (b) the receiver simulation. These snapshots are taken at the last time step. Note that different colour bars have been used to improve interpretability.
5. Results
5.1. Eddy diffusivity moments
Figure 7 shows normalized MFM measurements of the eddy diffusivity moments  $D^{00}$,
$D^{00}$,  $D^{10}$,
$D^{10}$,  $D^{01}$ and
$D^{01}$ and  $D^{20}$ averaged over
$D^{20}$ averaged over  $1000$ realizations and the homogeneous direction
$1000$ realizations and the homogeneous direction  $x$. Some expected characteristics of the measured moments are observed.
$x$. Some expected characteristics of the measured moments are observed.
(i) The leading-order moment is over two magnitudes larger than the molecular diffusivity (
 $10^{-9} \,{\rm m}^2\,{\rm s}^{-1}$). The scaled higher-order moments shown are all at least one magnitude larger than the molecular diffusivity.
$10^{-9} \,{\rm m}^2\,{\rm s}^{-1}$). The scaled higher-order moments shown are all at least one magnitude larger than the molecular diffusivity.(ii) Here,
$D^{00}$ is symmetric and always positive.(iii) Here,
$D^{10}$ is antisymmetric. This antisymmetry can be understood by interpreting $D^{10}/D^{00}$ as the centroid of the eddy diffusivity kernel. Physically, for $\eta >0$, it is expected that the mean scalar gradient at the centre of the mixing layer (at a negative distance away) has more influence on the turbulent scalar flux than the mean scalar gradient at the outer edges, since the mixing layer is growing outwards. This makes the eddy diffusivity kernel skewed more towards the centre of the domain, so $D^{10}<0$ for $\eta >0$. A similar effect occurs for $\eta <0$, which results in $D^{10}>0$.(iv) Here,
$D^{01}$ is symmetric and always negative. The latter must be true for the flow to depend on its history (it does not violate causality).(v) Here,
$D^{20}$ is symmetric and always positive, as is characteristic of moment of inertia of a positive kernel.












Figure 7. Moments of eddy diffusivity kernel normalized by appropriate length and time scales. Data averaged over 1000 realizations and homogeneous direction  $x$, for (a)
$x$, for (a)  $D^{00}$, (b)
$D^{00}$, (b)  $D^{10}/h(t)$, (c)
$D^{10}/h(t)$, (c)  $D^{01}/t$, (d)
$D^{01}/t$, (d)  $D^{20}/h(t)^2$.
$D^{20}/h(t)^2$.
Based on the magnitudes of the normalized moments, some initial observations on the importance of each moment can be made. Here,  $D^{00}$ has the highest magnitude of all the moments, which is expected since it is the leading-order moment. The magnitudes of
$D^{00}$ has the highest magnitude of all the moments, which is expected since it is the leading-order moment. The magnitudes of  $D^{10}/h$ and
$D^{10}/h$ and  $D^{01}/t$ are of the order of
$D^{01}/t$ are of the order of  $10\,\%$ of the magnitude of
$10\,\%$ of the magnitude of  $D^{00}$, which suggests that they are non-negligible. On the other hand, the magnitude of
$D^{00}$, which suggests that they are non-negligible. On the other hand, the magnitude of  $D^{20}/h^2$ is of the order of
$D^{20}/h^2$ is of the order of  $1\,\%$ of that of
$1\,\%$ of that of  $D^{00}$, so
$D^{00}$, so  $D^{20}$ is likely not an important moment to include in modelling RTI. More robust studies will be presented in the following subsections to determine the importance of each of the eddy diffusivity moments.
$D^{20}$ is likely not an important moment to include in modelling RTI. More robust studies will be presented in the following subsections to determine the importance of each of the eddy diffusivity moments.
It is also observed that there is statistical error in the measurements. Due to the chaotic nature of RTI, the moment measurements contain statistical error, but this error can be reduced by averaging many realizations. To demonstrate statistical convergence of the measurements, plots of  $D^{00}$ averaged over different numbers of realizations are included in figure 8. As the number of realizations increases, the plots become smoother, and it is found that after
$D^{00}$ averaged over different numbers of realizations are included in figure 8. As the number of realizations increases, the plots become smoother, and it is found that after  $1000$ realizations, the rate of reduction in statistical error slows down significantly. Averaging over this number of realizations results in a smooth
$1000$ realizations, the rate of reduction in statistical error slows down significantly. Averaging over this number of realizations results in a smooth  $D^{00}$ measurement and higher-order moment measurements with acceptably less statistical error.
$D^{00}$ measurement and higher-order moment measurements with acceptably less statistical error.

Figure 8. Moment  $D^{00}$ averaged over different numbers of realizations: (a)
$D^{00}$ averaged over different numbers of realizations: (a)  $8$, (b)
$8$, (b)  $32$, (c)
$32$, (c)  $100$, (d)
$100$, (d)  $1000$.
$1000$.
Additionally, the higher the order of the moment, the slower its rate of statistical convergence. Recall that determination of higher-order moments requires information from lower-order moments. For example, in determining  $D^{01}$,
$D^{01}$,  $tD^{00}$ is subtracted from
$tD^{00}$ is subtracted from  $F^{01}$, the turbulent scalar flux measurement in the simulation associated with
$F^{01}$, the turbulent scalar flux measurement in the simulation associated with  $D^{01}$. Naturally, there is statistical error associated with both
$D^{01}$. Naturally, there is statistical error associated with both  $D^{01}$ and
$D^{01}$ and  $D^{00}$. However, the error in
$D^{00}$. However, the error in  $D^{00}$ is amplified by
$D^{00}$ is amplified by  $t$, so the overall statistical error of
$t$, so the overall statistical error of  $D^{01}$ increases with time. This statistical error ‘leakage’ occurs for all higher-order moments. The higher the order of the moment, the worse the statistical error, since information from more lower-order moments is needed, so more statistical error is accumulated and amplified. The relatively high statistical error of the higher-order moments makes it challenging to study their importance. In particular, taking derivatives of quantities with high statistical error amplifies the error, so smoother measurements are desired. In this work, the moment measurements are smoothed using a Savitzky–Golay filter function in Matlab with a polynomial order of unity and window size
$D^{01}$ increases with time. This statistical error ‘leakage’ occurs for all higher-order moments. The higher the order of the moment, the worse the statistical error, since information from more lower-order moments is needed, so more statistical error is accumulated and amplified. The relatively high statistical error of the higher-order moments makes it challenging to study their importance. In particular, taking derivatives of quantities with high statistical error amplifies the error, so smoother measurements are desired. In this work, the moment measurements are smoothed using a Savitzky–Golay filter function in Matlab with a polynomial order of unity and window size  $191$. These smoothed moments are shown in figure 9. While it is possible to design an alternative formulation of the MFM that removes leakage of statistical error from low-order moments to higher-order moments (see Lavacot et al. Reference Lavacot, Liu, Morgan and Mani2022), for this 2-D study and for the order of moments considered here, the statistical convergence is sufficient.
$191$. These smoothed moments are shown in figure 9. While it is possible to design an alternative formulation of the MFM that removes leakage of statistical error from low-order moments to higher-order moments (see Lavacot et al. Reference Lavacot, Liu, Morgan and Mani2022), for this 2-D study and for the order of moments considered here, the statistical convergence is sufficient.

Figure 9. Smoothed moments (dashed red) over raw MFM measurements of moments (solid black). The moments are taken from the mean data at the last time step of the simulations and are transformed to self-similar space.
Using these measurements, non-local time scales and length scales ( $t_{NL}$ and
$t_{NL}$ and  $L_{NL}$, respectively) can be defined:
$L_{NL}$, respectively) can be defined:
 \begin{equation} t_{NL} ={-}\frac{D^{01}}{D^{00}}, \quad L_{NL} = \sqrt{\frac{D^{20}}{D^{00}}}. \end{equation}
\begin{equation} t_{NL} ={-}\frac{D^{01}}{D^{00}}, \quad L_{NL} = \sqrt{\frac{D^{20}}{D^{00}}}. \end{equation}
Note that this analysis can be done only for  $-1\leq \eta \leq 1$, since the moments are analytically zero outside the mixing layer.
$-1\leq \eta \leq 1$, since the moments are analytically zero outside the mixing layer.
Non-dimensionally, the non-local time scale is  $\tau _{NL} = t_{NL}/t_0$, and the non-local length scale is
$\tau _{NL} = t_{NL}/t_0$, and the non-local length scale is  $\eta _{NL}=L_{NL}/h$. Contour plots of the non-dimensionalized non-local time scale and length scale are in figure 10. Note that
$\eta _{NL}=L_{NL}/h$. Contour plots of the non-dimensionalized non-local time scale and length scale are in figure 10. Note that  $\tau _{NL}$ scales as
$\tau _{NL}$ scales as  $\tau$, so profiles of
$\tau$, so profiles of  $\tau _{NL}/\tau$ against
$\tau _{NL}/\tau$ against  $\eta$ are also plotted in figure 11 in the self-similar time regime (
$\eta$ are also plotted in figure 11 in the self-similar time regime ( $\tau >17$). The scaled profiles collapse and have centreline value approximately
$\tau >17$). The scaled profiles collapse and have centreline value approximately  $0.1$. This means that the mean fluxes at some time
$0.1$. This means that the mean fluxes at some time  $\tau$ are affected by mean scalar gradients
$\tau$ are affected by mean scalar gradients  $0.1\tau$ earlier. Figure 12 shows that the minimum non-local length scale is at the centreline, where
$0.1\tau$ earlier. Figure 12 shows that the minimum non-local length scale is at the centreline, where  $\eta _{NL}\approx 0.09$. The maximum length scales occur near the outer edges of the mixing layer: at approximately
$\eta _{NL}\approx 0.09$. The maximum length scales occur near the outer edges of the mixing layer: at approximately  $\eta =\pm 0.87$,
$\eta =\pm 0.87$,  $\eta _{NL}\approx 0.27$. This indicates that mean fluxes at the mixing layer edges depend mostly on mean scalar gradients approximately a quarter of a mixing width away, while mean fluxes at the centreline depend on mean scalar gradients approximately one-tenth of a mixing width away; non-locality appears to be stronger at the mixing layer edges than at the centreline. These non-local properties of the eddy diffusivity for RTI could not be predicted without direct measurement of the eddy diffusivity moments, which has been made possible through MFM.
$\eta _{NL}\approx 0.27$. This indicates that mean fluxes at the mixing layer edges depend mostly on mean scalar gradients approximately a quarter of a mixing width away, while mean fluxes at the centreline depend on mean scalar gradients approximately one-tenth of a mixing width away; non-locality appears to be stronger at the mixing layer edges than at the centreline. These non-local properties of the eddy diffusivity for RTI could not be predicted without direct measurement of the eddy diffusivity moments, which has been made possible through MFM.

Figure 10. Non-dimensional non-local time scale and length scale contours: (a)  $\tau _{NL}$, (b)
$\tau _{NL}$, (b)  $\eta _{NL}$. Only
$\eta _{NL}$. Only  $-1\leq \eta \leq 1$ is plotted, since moments are zero outside the mixing layer. Early times (
$-1\leq \eta \leq 1$ is plotted, since moments are zero outside the mixing layer. Early times ( $\tau <2$) are not plotted due to transient behaviour.
$\tau <2$) are not plotted due to transient behaviour.

Figure 11. Non-dimensional non-local time scale profiles at different times for  $\tau >17$. Lighter lines correspond to later times; darker lines correspond to earlier times. (a) Unscaled, showing the linear time dependence of
$\tau >17$. Lighter lines correspond to later times; darker lines correspond to earlier times. (a) Unscaled, showing the linear time dependence of  $\tau _{NL}$ on
$\tau _{NL}$ on  $\tau$. (b) The collapse of the profiles when scaled by
$\tau$. (b) The collapse of the profiles when scaled by  $\tau$.
$\tau$.

Figure 12. Non-dimensional non-local length scale profiles at different times for  $\tau >17$. Lighter lines correspond to later times; darker lines correspond to earlier times.
$\tau >17$. Lighter lines correspond to later times; darker lines correspond to earlier times.
5.2. Assessment of importance of non-local effects
5.2.1. Comparison of terms in the turbulent scalar flux expansion
To aid in the determination of which moments are important for a RANS model, a comparison of the terms in the expansion of the turbulent scalar flux (3.6) is presented. These terms involve gradients of  $\langle Y_H \rangle$. Instead of using
$\langle Y_H \rangle$. Instead of using  $\langle Y_H \rangle$ directly from the DNS, a fit to
$\langle Y_H \rangle$ directly from the DNS, a fit to  $\langle Y_H \rangle$ is used, since the statistical error in the raw measurement gets amplified by derivatives in
$\langle Y_H \rangle$ is used, since the statistical error in the raw measurement gets amplified by derivatives in  $\eta$. That is, the quantities of interest are sufficiently converged for plotting but not for operations involving derivatives. Thus an analytical fit to
$\eta$. That is, the quantities of interest are sufficiently converged for plotting but not for operations involving derivatives. Thus an analytical fit to  $\langle Y_H \rangle$ is obtained as follows:
$\langle Y_H \rangle$ is obtained as follows:
 \begin{gather} \langle Y_H \rangle ^* = \begin{cases} 0, & \text{if } \eta<{-}a,\\ \displaystyle\int_{{-}a}^\eta \dfrac{1}{(a^2-{\eta'}^2)^2}\exp\left(\dfrac{1}{B(a^2-{\eta'}^2)}\right)\,{\rm d}{\eta'}, & \text{if } {-a}\leq\eta\leq a,\\ 1, & \text{if } \eta>a, \end{cases} \end{gather}
\begin{gather} \langle Y_H \rangle ^* = \begin{cases} 0, & \text{if } \eta<{-}a,\\ \displaystyle\int_{{-}a}^\eta \dfrac{1}{(a^2-{\eta'}^2)^2}\exp\left(\dfrac{1}{B(a^2-{\eta'}^2)}\right)\,{\rm d}{\eta'}, & \text{if } {-a}\leq\eta\leq a,\\ 1, & \text{if } \eta>a, \end{cases} \end{gather} \begin{gather}\langle Y_H \rangle = \frac{\langle Y_H \rangle ^*}{\langle Y_H \rangle ^*_{max}}, \end{gather}
\begin{gather}\langle Y_H \rangle = \frac{\langle Y_H \rangle ^*}{\langle Y_H \rangle ^*_{max}}, \end{gather}
where the integral is determined numerically, and  $a$ and
$a$ and  $B$ are fitting coefficients. The coefficients
$B$ are fitting coefficients. The coefficients  $a^2=1.2$ and
$a^2=1.2$ and  $B=0.36$ are found to give good agreement with the mean concentration profile from DNS, as shown in figure 13.
$B=0.36$ are found to give good agreement with the mean concentration profile from DNS, as shown in figure 13.

Figure 13. Semi-analytical fit to  $\langle Y_H \rangle$ (dashed red) against DNS measurement of
$\langle Y_H \rangle$ (dashed red) against DNS measurement of  $\langle Y_H \rangle$ (solid black).
$\langle Y_H \rangle$ (solid black).
The terms on the right-hand side of (3.6) are plotted against the DNS measurement of the turbulent scalar flux in figure 14. Clearly, the  $\widehat {D^{00}}$ term is not enough to capture the turbulent scalar flux. It is observed that the
$\widehat {D^{00}}$ term is not enough to capture the turbulent scalar flux. It is observed that the  $\widehat {D^{01}}$ term is significant in magnitude in the middle of the domain, and the
$\widehat {D^{01}}$ term is significant in magnitude in the middle of the domain, and the  $\widehat {D^{10}}$ term carries importance at the outer edges of the mixing layer. The term associated with the highest-order moment that was measured,
$\widehat {D^{10}}$ term carries importance at the outer edges of the mixing layer. The term associated with the highest-order moment that was measured,  $\widehat {D^{20}}$, also appears to be of magnitude similar to the other moments, indicating that it may also carry important information about non-locality of the eddy diffusivity. These preliminary findings indicate that non-locality is certainly important for accurate modelling of mean scalar transport in this RTI problem, since the higher-order terms in (3.6) appear non-negligible compared to the leading-order term. It may be tempting to ascribe physical reasons for the behaviour of the terms plotted in figure 14, but this is not so straightforward, especially since the full eddy diffusivity kernel for this problem has not yet been measured. Further, it would be inappropriate to draw conclusions about importance of each eddy diffusivity moment in a RANS model, since the operator form must be scrutinized first. A faulty operator form could give misleading implications about certain eddy diffusivity moments. It turns out that a simple superposition of these terms, which would represent a truncation of (3.6), does not accurately represent the true eddy diffusivity kernel and actually leads to divergence of predictions, so such an operator form would not be appropriate; this will be covered more in depth in § 5.3. Nevertheless, the results shown here are strong evidence of non-locality of the eddy diffusivity kernel for the RTI simulated here.
$\widehat {D^{20}}$, also appears to be of magnitude similar to the other moments, indicating that it may also carry important information about non-locality of the eddy diffusivity. These preliminary findings indicate that non-locality is certainly important for accurate modelling of mean scalar transport in this RTI problem, since the higher-order terms in (3.6) appear non-negligible compared to the leading-order term. It may be tempting to ascribe physical reasons for the behaviour of the terms plotted in figure 14, but this is not so straightforward, especially since the full eddy diffusivity kernel for this problem has not yet been measured. Further, it would be inappropriate to draw conclusions about importance of each eddy diffusivity moment in a RANS model, since the operator form must be scrutinized first. A faulty operator form could give misleading implications about certain eddy diffusivity moments. It turns out that a simple superposition of these terms, which would represent a truncation of (3.6), does not accurately represent the true eddy diffusivity kernel and actually leads to divergence of predictions, so such an operator form would not be appropriate; this will be covered more in depth in § 5.3. Nevertheless, the results shown here are strong evidence of non-locality of the eddy diffusivity kernel for the RTI simulated here.

Figure 14. Comparison of terms in the expansion of the turbulent scalar flux. Solid black indicates DNS measurement of turbulent scalar flux; solid blue indicates the  $\widehat {D^{00}}$ term; dashed pink indicates the
$\widehat {D^{00}}$ term; dashed pink indicates the  $\widehat {D^{10}}$ term; dash-dotted green indicates the
$\widehat {D^{10}}$ term; dash-dotted green indicates the  $\widehat {D^{01}}$ term; dotted orange indicates the
$\widehat {D^{01}}$ term; dotted orange indicates the  $\widehat {D^{20}}$ term.
$\widehat {D^{20}}$ term.
5.2.2. Comparison of the leading-order model against a local model
To demonstrate the shortcomings of models using purely local coefficients, an MFM-based leading-order model and the  $k$-
$k$- $L$ RANS model are compared. The intent of this study is not to immediately propose a ‘better’ RANS model to replace
$L$ RANS model are compared. The intent of this study is not to immediately propose a ‘better’ RANS model to replace  $k$-
$k$- $L$, nor is it to suggest that the MFM-based leading-order model is more accurate than the
$L$, nor is it to suggest that the MFM-based leading-order model is more accurate than the  $k$-
$k$- $L$ model. In fact, it is expected that the MFM-based leading-order model will perform poorly, since it does not include important higher-order moments of eddy diffusivity. Instead, this study emphasizes the necessity of higher-order moments, and shows how MFM can reveal incorrect model forms.
$L$ model. In fact, it is expected that the MFM-based leading-order model will perform poorly, since it does not include important higher-order moments of eddy diffusivity. Instead, this study emphasizes the necessity of higher-order moments, and shows how MFM can reveal incorrect model forms.
In particular, a one-dimensional  $k$-
$k$- $L$ simulation is run, and the eddy diffusivity and mean concentration profiles are extracted from the results to be compared to those of the MFM-based model using the measured
$L$ simulation is run, and the eddy diffusivity and mean concentration profiles are extracted from the results to be compared to those of the MFM-based model using the measured  $D^{00}$ that was presented in § 5.1. The
$D^{00}$ that was presented in § 5.1. The  $k$-
$k$- $L$ simulation used in this section is implemented in Ares, and details of the implementation are in Morgan & Greenough (Reference Morgan and Greenough2015) and Morgan (Reference Morgan2018). Note that the
$L$ simulation used in this section is implemented in Ares, and details of the implementation are in Morgan & Greenough (Reference Morgan and Greenough2015) and Morgan (Reference Morgan2018). Note that the  $k$-
$k$- $L$ simulation is used here for illustration purposes and should not be confused with the 2-D DNS used to obtain our MFM moments.
$L$ simulation is used here for illustration purposes and should not be confused with the 2-D DNS used to obtain our MFM moments.
The MFM-measured  $D^{00}$ is used for the leading-order MFM-based model:
$D^{00}$ is used for the leading-order MFM-based model:
 \begin{equation} -\langle v'Y_H' \rangle = D^{00}_{MFM}\,\frac{\partial\langle Y_H \rangle }{\partial y}. \end{equation}
\begin{equation} -\langle v'Y_H' \rangle = D^{00}_{MFM}\,\frac{\partial\langle Y_H \rangle }{\partial y}. \end{equation}
To solve this,  $D^{00}_{MFM}$ is obtained from the smoothed MFM measurements and transformed to self-similar coordinates. The resulting
$D^{00}_{MFM}$ is obtained from the smoothed MFM measurements and transformed to self-similar coordinates. The resulting  $\widehat {D^{00}_{MFM}}$ is a function of
$\widehat {D^{00}_{MFM}}$ is a function of  $\eta ={y}/{h_{DNS}}$, where
$\eta ={y}/{h_{DNS}}$, where  $h_{DNS}=\alpha ^*_{DNS}Ag(t-t^*_{DNS})^2$ is an algebraic fit to the mixing width from the DNS. The equation is then solved semi-analytically in conjunction with the mean mass fraction evolution equation in self-similar coordinates:
$h_{DNS}=\alpha ^*_{DNS}Ag(t-t^*_{DNS})^2$ is an algebraic fit to the mixing width from the DNS. The equation is then solved semi-analytically in conjunction with the mean mass fraction evolution equation in self-similar coordinates:
 \begin{gather} -2\eta\,\frac{{\rm d}\langle Y_H \rangle }{{\rm d}\eta}=\frac{{\rm d}}{{\rm d}\eta}\left(-\widehat{\langle v'Y_H' \rangle }\right), \end{gather}
\begin{gather} -2\eta\,\frac{{\rm d}\langle Y_H \rangle }{{\rm d}\eta}=\frac{{\rm d}}{{\rm d}\eta}\left(-\widehat{\langle v'Y_H' \rangle }\right), \end{gather} \begin{gather}-\widehat{\langle v'Y_H' \rangle } = \widehat{D^{00}_{MFM}}\,\frac{{\rm d}\langle Y_H \rangle }{{\rm d}\eta}. \end{gather}
\begin{gather}-\widehat{\langle v'Y_H' \rangle } = \widehat{D^{00}_{MFM}}\,\frac{{\rm d}\langle Y_H \rangle }{{\rm d}\eta}. \end{gather} The  $k\text {-}L$ model uses the gradient diffusion approximation for the turbulent flux:
$k\text {-}L$ model uses the gradient diffusion approximation for the turbulent flux:
 \begin{equation} -\langle v'Y_H' \rangle = \frac{\mu_t}{\langle \rho \rangle\,N_Y}\,\frac{\partial\langle Y_H \rangle }{\partial y} = D^{00}_{k\text{-}L}\,\frac{\partial\langle Y_H \rangle }{\partial y}, \end{equation}
\begin{equation} -\langle v'Y_H' \rangle = \frac{\mu_t}{\langle \rho \rangle\,N_Y}\,\frac{\partial\langle Y_H \rangle }{\partial y} = D^{00}_{k\text{-}L}\,\frac{\partial\langle Y_H \rangle }{\partial y}, \end{equation}
where  $\mu _t=C_\mu \langle \rho \rangle L\sqrt {2k}$, and
$\mu _t=C_\mu \langle \rho \rangle L\sqrt {2k}$, and  $N_Y$ is one of the model coefficients set by similarity constraints derived by Dimonte & Tipton (Reference Dimonte and Tipton2006). In particular, this work uses the coefficient calibration detailed in (Morgan & Greenough Reference Morgan and Greenough2015), and the coefficients are chosen to achieve the same
$N_Y$ is one of the model coefficients set by similarity constraints derived by Dimonte & Tipton (Reference Dimonte and Tipton2006). In particular, this work uses the coefficient calibration detailed in (Morgan & Greenough Reference Morgan and Greenough2015), and the coefficients are chosen to achieve the same  $\alpha$ as the DNS. Here,
$\alpha$ as the DNS. Here,  $C_\mu$ is unity and
$C_\mu$ is unity and  $N_Y$ is
$N_Y$ is  $2.47$. The
$2.47$. The  $k$-
$k$- $L$ RANS model is solved in spatio-temporal coordinates, and the
$L$ RANS model is solved in spatio-temporal coordinates, and the  $\langle \rho \rangle$,
$\langle \rho \rangle$,  $k$ and
$k$ and  $L$ obtained from the solution are used to compute
$L$ obtained from the solution are used to compute  $\mu _t$ and, consequently,
$\mu _t$ and, consequently,  $D^{00}_{k\text {-}L}$, which is purely local. For a meaningful comparison with the MFM-based model,
$D^{00}_{k\text {-}L}$, which is purely local. For a meaningful comparison with the MFM-based model,  $D^{00}_{k\text {-}L}$ is transformed to
$D^{00}_{k\text {-}L}$ is transformed to  $\widehat {D^{00}_{k\text {-}L}}$ according to the self-similar coordinate
$\widehat {D^{00}_{k\text {-}L}}$ according to the self-similar coordinate  $\xi ={y}/{h_{k\text {-}L}}$, where
$\xi ={y}/{h_{k\text {-}L}}$, where  $h_{k\text {-}L}=\alpha ^*_{k\text {-}L}Ag(t-t^*_{k\text {-}L})^2$. It must be noted that the
$h_{k\text {-}L}=\alpha ^*_{k\text {-}L}Ag(t-t^*_{k\text {-}L})^2$. It must be noted that the  $h$ fitting coefficients
$h$ fitting coefficients  $\alpha ^*$ and
$\alpha ^*$ and  $t^*$ are not the same between the DNS and
$t^*$ are not the same between the DNS and  $k$-
$k$- $L$ solutions. In this work,
$L$ solutions. In this work,  $\alpha ^*_{DNS}=0.046$,
$\alpha ^*_{DNS}=0.046$,  $t^*_{DNS}=-1600$ s,
$t^*_{DNS}=-1600$ s,  $\alpha ^*_{k\text {-}L}=0.04$ and
$\alpha ^*_{k\text {-}L}=0.04$ and  $t^*_{k\text {-}L}=1250\,{\rm s}$ (
$t^*_{k\text {-}L}=1250\,{\rm s}$ ( $t^*_{k\text {-}L}$ is positive due to the relaxation time to the self-similar profiles in the beginning of the
$t^*_{k\text {-}L}$ is positive due to the relaxation time to the self-similar profiles in the beginning of the  $k$-
$k$- $L$ simulation).
$L$ simulation).
Figure 15(a) shows the mean concentration profiles computed using each of the two models. As expected, the MFM-based leading-order model performs poorly, not capturing the slope of the DNS profile, since that model uses only the leading-order eddy diffusivity moment and incorporates no information about non-locality of the eddy diffusivity. The  $k$-
$k$- $L$ model exhibits divergence from DNS at the outer edges of the mixing layer, since it is designed to predict a linear
$L$ model exhibits divergence from DNS at the outer edges of the mixing layer, since it is designed to predict a linear  $\langle Y_H \rangle$ profile. However, it does capture the slope of the DNS profile, despite it also using a leading-order closure. In addition, it is observed in figure 15(b) that the MFM-measured
$\langle Y_H \rangle$ profile. However, it does capture the slope of the DNS profile, despite it also using a leading-order closure. In addition, it is observed in figure 15(b) that the MFM-measured  $\widehat {D^{00}_{MFM}}$ is significantly lower in magnitude than
$\widehat {D^{00}_{MFM}}$ is significantly lower in magnitude than  $\widehat {D^{00}_{k\text {-}L}}$. Here, MFM reveals that the
$\widehat {D^{00}_{k\text {-}L}}$. Here, MFM reveals that the  $k$-
$k$- $L$ model is using an incorrect model form, since the
$L$ model is using an incorrect model form, since the  $D^{00}$ that it is using does not match the MFM measurement. In fact, the
$D^{00}$ that it is using does not match the MFM measurement. In fact, the  $k\text {-}L$ model is using this higher-magnitude coefficient in order to compensate for the error in model form and achieve a linear mean concentration profile with a slope that matches the DNS. Despite this compensation, the
$k\text {-}L$ model is using this higher-magnitude coefficient in order to compensate for the error in model form and achieve a linear mean concentration profile with a slope that matches the DNS. Despite this compensation, the  $k$-
$k$- $L$ model still disagrees with the DNS results at the outer edges of the mixing layer, which are important for capturing the average reaction rate in reacting flows as in ICF. A more accurate RANS model would more closely match the eddy diffusivity moments measured by MFM. As results will show shortly, the gap between the leading-order MFM-based model
$L$ model still disagrees with the DNS results at the outer edges of the mixing layer, which are important for capturing the average reaction rate in reacting flows as in ICF. A more accurate RANS model would more closely match the eddy diffusivity moments measured by MFM. As results will show shortly, the gap between the leading-order MFM-based model  $\langle Y_H \rangle$ and the DNS measurement would be bridged by inclusion of higher-order moments, which would introduce information about the non-locality of the eddy diffusivity.
$\langle Y_H \rangle$ and the DNS measurement would be bridged by inclusion of higher-order moments, which would introduce information about the non-locality of the eddy diffusivity.

Figure 15. Comparisons of (a) model coefficient from the  $k$-
$k$- $L$ model with leading-order moment measured using MFM, and (b) resulting similarity solutions for
$L$ model with leading-order moment measured using MFM, and (b) resulting similarity solutions for  $\langle Y_H \rangle$. Inset in (a) shows zoomed-in view around
$\langle Y_H \rangle$. Inset in (a) shows zoomed-in view around  $\eta =-1$ to highlight divergence of the
$\eta =-1$ to highlight divergence of the  $k$-
$k$- $L$ model from DNS. Solid black indicates DNS measurement; dash-dotted blue indicates leading-order MFM-based model; dashed red indicates the
$L$ model from DNS. Solid black indicates DNS measurement; dash-dotted blue indicates leading-order MFM-based model; dashed red indicates the  $k\text {-}L$ model.
$k\text {-}L$ model.
5.3. Assessment of non-local operator forms
In this subsection, two RANS operator forms using information about the non-locality of the eddy diffusivity are presented. These are the explicit and implicit operator forms; the former is a truncation of the turbulent scalar flux expansion (3.6), and the latter will be presented shortly. It must be stressed that the intention of the following studies is not to propose a new RANS model. Ultimately, a RANS model should not depend on direct MFM measurements that can be retrieved only from impractically many DNS. Instead, these studies are performed to further assess the importance of each of the eddy diffusivity moments, determine which combinations of moments best enhance the performance of a RANS model, and examine the differences between the explicit and implicit operator forms. The aim of these studies is to inform development of more predictive RANS models for RTI, not to suggest that these are the exact models that should be used.
In addition,  $D^{20}$ will not be included in the following studies. This is mainly due to the high statistical error in the measurement that makes it difficult to ascertain whether errors in the results are due to this statistical error or solely the addition of the moment to the model. From the comparison of terms in § 5.2.1, it is expected that
$D^{20}$ will not be included in the following studies. This is mainly due to the high statistical error in the measurement that makes it difficult to ascertain whether errors in the results are due to this statistical error or solely the addition of the moment to the model. From the comparison of terms in § 5.2.1, it is expected that  $D^{20}$ is not as important as
$D^{20}$ is not as important as  $D^{10}$ and
$D^{10}$ and  $D^{01}$ to include in a RANS model. This should be tested in future work when a more statistically converged measurement is achieved for
$D^{01}$ to include in a RANS model. This should be tested in future work when a more statistically converged measurement is achieved for  $D^{20}$, ideally in a 3-D analysis.
$D^{20}$, ideally in a 3-D analysis.
5.3.1. Explicit operator form
The explicit operator form is a truncation of the expansion of the turbulent scalar flux, as defined in (3.6). Hamba (Reference Hamba1995, Reference Hamba2004) has examined this form in the context of shear flows. Transformation of this expansion to self-similar coordinates and substitution into (3.3) results in
 \begin{equation} {-}2\eta\,\frac{{\rm
d}\langle Y_H \rangle }{{\rm d}\eta}\!=\!\frac{{\rm d}}{{\rm
d}\eta}\left[\left(\widehat{D^{00}}-\widehat{D^{01}}\right)\frac{{\rm
d}\langle Y_H \rangle }{{\rm d}\eta} \!+\!
\left({-}\eta\widehat{D^{01}}\!+\!\widehat{D^{10}}\right)\frac{{\rm
d}^2\langle Y_H \rangle }{{\rm d}\eta^2}
+\widehat{D^{20}}\,\frac{{\rm d}^3\langle Y_H \rangle
}{{\rm d}\eta^3}+\cdots\right],
\end{equation}
\begin{equation} {-}2\eta\,\frac{{\rm
d}\langle Y_H \rangle }{{\rm d}\eta}\!=\!\frac{{\rm d}}{{\rm
d}\eta}\left[\left(\widehat{D^{00}}-\widehat{D^{01}}\right)\frac{{\rm
d}\langle Y_H \rangle }{{\rm d}\eta} \!+\!
\left({-}\eta\widehat{D^{01}}\!+\!\widehat{D^{10}}\right)\frac{{\rm
d}^2\langle Y_H \rangle }{{\rm d}\eta^2}
+\widehat{D^{20}}\,\frac{{\rm d}^3\langle Y_H \rangle
}{{\rm d}\eta^3}+\cdots\right],
\end{equation}
which can be solved numerically for  $\langle Y_H \rangle$. The
$\langle Y_H \rangle$. The  $\widehat {D^{mn}}$ used in the numerical solve are the smoothed, normalized moments. To determine which eddy diffusivity moments are important in constructing RANS models for RTI, different combinations of
$\widehat {D^{mn}}$ used in the numerical solve are the smoothed, normalized moments. To determine which eddy diffusivity moments are important in constructing RANS models for RTI, different combinations of  $\widehat {D^{mn}}$ terms are kept in (5.8), and the results are compared to DNS. In the numerical solve, (5.8) is discretized on a staggered mesh, and derivatives are computed using central finite differences. A matrix–vector equation is assembled and solved for
$\widehat {D^{mn}}$ terms are kept in (5.8), and the results are compared to DNS. In the numerical solve, (5.8) is discretized on a staggered mesh, and derivatives are computed using central finite differences. A matrix–vector equation is assembled and solved for  $\langle Y_H \rangle$ with Dirichlet boundary conditions.
$\langle Y_H \rangle$ with Dirichlet boundary conditions.
Figure 16 shows the turbulent scalar fluxes computed using the explicit operator form, and figure 17 shows the corresponding mean concentration profiles. Again, it is apparent that the leading-order moment is not enough to capture the turbulent scalar flux. The combination using  $D^{00}$,
$D^{00}$,  $D^{10}$ and
$D^{10}$ and  $D^{01}$ – the moments deemed most important in § 5.2.1 – gives the best match to the DNS measurement.
$D^{01}$ – the moments deemed most important in § 5.2.1 – gives the best match to the DNS measurement.

Figure 16. Turbulent scalar flux predictions using the explicit operator form. Moments used in the model are: (a)  $D^{00}$; (b)
$D^{00}$; (b)  $D^{00}, D^{10}$; (c)
$D^{00}, D^{10}$; (c)  $D^{00}, D^{01}$; (d)
$D^{00}, D^{01}$; (d)  $D^{00}, D^{10}, D^{01}$.
$D^{00}, D^{10}, D^{01}$.

Figure 17. Mean concentration profile predictions using the explicit operator form. Moments used in the model are: (a)  $D^{00}$; (b)
$D^{00}$; (b)  $D^{00}, D^{10}$; (c)
$D^{00}, D^{10}$; (c)  $D^{00}, D^{01}$; (d)
$D^{00}, D^{01}$; (d)  $D^{00}, D^{10}, D^{01}$.
$D^{00}, D^{10}, D^{01}$.
It is particularly remarkable that a converged turbulent scalar flux can be obtained using  $D^{00}$,
$D^{00}$,  $D^{10}$ and
$D^{10}$ and  $D^{01}$. As mentioned previously, it is known that (3.6) may not converge. That is, the expansion must be taken to infinite terms to remove error; truncating the expansion can result in significant error. This is analogous to a Kramers–Moyal expansion, which cannot be approximated adequately by more than two terms, after which it requires infinite terms for convergence (Pawula Reference Pawula1967; Mauri Reference Mauri1991). To understand how adding terms to (3.6) can result in greater error, one can consider the eddy diffusivity kernel associated with each term. The leading-order moment is associated with a delta function kernel, as it is purely local. However, when (3.4) is replaced by (3.6), an integral operator is replaced with a high-order differential operator. This means that the non-local effects are approximated by derivatives of delta functions; see Liu et al. (Reference Liu, Williams and Mani2023) for more details. It has been shown that in general, the eddy diffusivity kernel is not a superposition of finite delta functions, as it is smooth (Mani & Park Reference Mani and Park2021; Liu et al. Reference Liu, Williams and Mani2023). Therefore, truncation of the expansion does not match the shape of the eddy diffusivity kernel, leading to errors in prediction of the turbulent scalar flux. While the
$D^{01}$. As mentioned previously, it is known that (3.6) may not converge. That is, the expansion must be taken to infinite terms to remove error; truncating the expansion can result in significant error. This is analogous to a Kramers–Moyal expansion, which cannot be approximated adequately by more than two terms, after which it requires infinite terms for convergence (Pawula Reference Pawula1967; Mauri Reference Mauri1991). To understand how adding terms to (3.6) can result in greater error, one can consider the eddy diffusivity kernel associated with each term. The leading-order moment is associated with a delta function kernel, as it is purely local. However, when (3.4) is replaced by (3.6), an integral operator is replaced with a high-order differential operator. This means that the non-local effects are approximated by derivatives of delta functions; see Liu et al. (Reference Liu, Williams and Mani2023) for more details. It has been shown that in general, the eddy diffusivity kernel is not a superposition of finite delta functions, as it is smooth (Mani & Park Reference Mani and Park2021; Liu et al. Reference Liu, Williams and Mani2023). Therefore, truncation of the expansion does not match the shape of the eddy diffusivity kernel, leading to errors in prediction of the turbulent scalar flux. While the  $D^{00}$,
$D^{00}$,  $D^{10}$ and
$D^{10}$ and  $D^{01}$ combination did not diverge, adding
$D^{01}$ combination did not diverge, adding  $D^{20}$ does lead to divergent results for these reasons, so this combination is not presented here.
$D^{20}$ does lead to divergent results for these reasons, so this combination is not presented here.
Another issue with the explicit operator form is its numerical implementation. In spatio-temporal space, some terms associated with higher-order moments involve mixed derivatives (e.g. the term  $D^{01}({\partial ^2}/{\partial t\,\partial y})$), which would undergo another spatial gradient when substituted into (3.3). Such terms are difficult to handle numerically. In this work, the model is implemented in the more convenient self-similar space, but ultimately, a spatio-temporal model would be developed, as it is more practical. It is thus pertinent to work towards a better method to incorporate non-local information in a RANS model that does not encounter the Kramers–Moyal-like convergence issue and is easier to implement.
$D^{01}({\partial ^2}/{\partial t\,\partial y})$), which would undergo another spatial gradient when substituted into (3.3). Such terms are difficult to handle numerically. In this work, the model is implemented in the more convenient self-similar space, but ultimately, a spatio-temporal model would be developed, as it is more practical. It is thus pertinent to work towards a better method to incorporate non-local information in a RANS model that does not encounter the Kramers–Moyal-like convergence issue and is easier to implement.
5.3.2. Implicit operator form and the matched moment inverse
In this section, an implicit operator form is introduced as a solution to both the increasing error when adding terms from the turbulent scalar flux expansion and implementation challenges associated with the explicit operator form. Recall that the explicit operator form fails to match the shape of the eddy diffusivity kernel without infinite terms of the turbulent scalar flux expansion. In this implicit operator form, the aim is to match the shape of the eddy diffusivity kernel, instead of using the truncated expansion for the turbulent scalar flux. Using the four moments that have been measured, this model form is
 \begin{equation} \left[1+a^{01}\,\frac{\partial}{\partial t}+a^{10}\,\frac{\partial}{\partial y}+a^{20}\,\frac{\partial^2}{\partial y^2}+\cdots\right](-\langle v'Y_H' \rangle )=a^{00}\,\frac{\partial \langle Y_H \rangle }{\partial y}, \end{equation}
\begin{equation} \left[1+a^{01}\,\frac{\partial}{\partial t}+a^{10}\,\frac{\partial}{\partial y}+a^{20}\,\frac{\partial^2}{\partial y^2}+\cdots\right](-\langle v'Y_H' \rangle )=a^{00}\,\frac{\partial \langle Y_H \rangle }{\partial y}, \end{equation}
where  $a^{mn}(y,t)$ are model coefficients fitted corresponding to each of the eddy diffusivity moments
$a^{mn}(y,t)$ are model coefficients fitted corresponding to each of the eddy diffusivity moments  $D^{mn}$ measured using MFM. The bracketed operator on the left-hand side is the matched moment inverse (MMI) operator. The way this model form is designed to match the eddy diffusivity kernel shape is detailed in Liu et al. (Reference Liu, Williams and Mani2023). In addition, this form is significantly easier to implement numerically in spatio-temporal space, since it can be directly time-integrated using explicit methods. In this way, it is also easy to add more terms with higher-order moments, as it simply requires extension of the operator.
$D^{mn}$ measured using MFM. The bracketed operator on the left-hand side is the matched moment inverse (MMI) operator. The way this model form is designed to match the eddy diffusivity kernel shape is detailed in Liu et al. (Reference Liu, Williams and Mani2023). In addition, this form is significantly easier to implement numerically in spatio-temporal space, since it can be directly time-integrated using explicit methods. In this way, it is also easy to add more terms with higher-order moments, as it simply requires extension of the operator.
In self-similar coordinates, this becomes
 \begin{equation} \left[1+\widehat{a^{01}}\left(1-2\eta\,\frac{{\rm d}}{{\rm d}\eta}\right)+\widehat{a^{10}}\,\frac{{\rm d}}{{\rm d} \eta}+\widehat{a^{20}}\,\frac{{\rm d}^2}{{\rm d} \eta^2}+\cdots\right](-\widehat{\langle v'Y_H' \rangle } )=\widehat{a^{00}}\,\frac{{\rm d} \langle Y_H \rangle }{{\rm d} \eta}, \end{equation}
\begin{equation} \left[1+\widehat{a^{01}}\left(1-2\eta\,\frac{{\rm d}}{{\rm d}\eta}\right)+\widehat{a^{10}}\,\frac{{\rm d}}{{\rm d} \eta}+\widehat{a^{20}}\,\frac{{\rm d}^2}{{\rm d} \eta^2}+\cdots\right](-\widehat{\langle v'Y_H' \rangle } )=\widehat{a^{00}}\,\frac{{\rm d} \langle Y_H \rangle }{{\rm d} \eta}, \end{equation}where it is found through self-similar analysis that
 \begin{gather} \widehat{a^{00}}=\frac{1}{{\alpha^*}^2 A^2g^2(t-t^*)^3}\,a^{00}, \end{gather}
\begin{gather} \widehat{a^{00}}=\frac{1}{{\alpha^*}^2 A^2g^2(t-t^*)^3}\,a^{00}, \end{gather} \begin{gather}\widehat{a^{01}}=\frac{1}{t-t^*}\,a^{01}, \end{gather}
\begin{gather}\widehat{a^{01}}=\frac{1}{t-t^*}\,a^{01}, \end{gather} \begin{gather}\widehat{a^{10}}=\frac{1}{\alpha^* Ag(t-t^*)^2}\,a^{10}, \end{gather}
\begin{gather}\widehat{a^{10}}=\frac{1}{\alpha^* Ag(t-t^*)^2}\,a^{10}, \end{gather} \begin{gather}\widehat{a^{20}}=\frac{1}{{\alpha^*}^2 A^2g^2(t-t^*)^4}\,a^{20}. \end{gather}
\begin{gather}\widehat{a^{20}}=\frac{1}{{\alpha^*}^2 A^2g^2(t-t^*)^4}\,a^{20}. \end{gather} The coefficients are determined through a process illustrated as follows in spatio-temporal coordinates for simplicity. If one wants to construct a model in the form (5.9), then four equations must be formulated to determine the four coefficients. This is done by using measurements from the four simulations used to determine the four moments  $D^{00}$,
$D^{00}$,  $D^{10}$,
$D^{10}$,  $D^{01}$ and
$D^{01}$ and  $D^{20}$. For example, the first equation results from substitution of
$D^{20}$. For example, the first equation results from substitution of  $F^{00}$ for
$F^{00}$ for  $-\langle v'Y_H' \rangle$ and the associated desired
$-\langle v'Y_H' \rangle$ and the associated desired  ${\partial \langle Y_H \rangle }/{\partial y}$; the remaining three equations follow, using the other three moments:
${\partial \langle Y_H \rangle }/{\partial y}$; the remaining three equations follow, using the other three moments:
 \begin{gather} \left[1+a^{10}\,\frac{\partial}{\partial y}+a^{01}\,\frac{\partial}{\partial t}+a^{20}\,\frac{\partial^2}{\partial y^2}\right]F^{00}=a^{00}, \end{gather}
\begin{gather} \left[1+a^{10}\,\frac{\partial}{\partial y}+a^{01}\,\frac{\partial}{\partial t}+a^{20}\,\frac{\partial^2}{\partial y^2}\right]F^{00}=a^{00}, \end{gather} \begin{gather}\left[1+a^{10}\,\frac{\partial}{\partial y}+a^{01}\,\frac{\partial}{\partial t}+a^{20}\,\frac{\partial^2}{\partial y^2}\right]F^{10}=a^{00} \left(y-\frac{1}{2}\right), \end{gather}
\begin{gather}\left[1+a^{10}\,\frac{\partial}{\partial y}+a^{01}\,\frac{\partial}{\partial t}+a^{20}\,\frac{\partial^2}{\partial y^2}\right]F^{10}=a^{00} \left(y-\frac{1}{2}\right), \end{gather} \begin{gather}\left[1+a^{10}\,\frac{\partial}{\partial y}+a^{01}\,\frac{\partial}{\partial t}+a^{20}\,\frac{\partial^2}{\partial y^2}\right]F^{01}=a^{00}t, \end{gather}
\begin{gather}\left[1+a^{10}\,\frac{\partial}{\partial y}+a^{01}\,\frac{\partial}{\partial t}+a^{20}\,\frac{\partial^2}{\partial y^2}\right]F^{01}=a^{00}t, \end{gather} \begin{gather}\left[1+a^{10}\,\frac{\partial}{\partial y}+a^{01}\,\frac{\partial}{\partial t}+a^{20}\,\frac{\partial^2}{\partial y^2}\right]F^{20}=a^{00}\,\frac{1}{2}\left(y-\frac{1}{2}\right)^2. \end{gather}
\begin{gather}\left[1+a^{10}\,\frac{\partial}{\partial y}+a^{01}\,\frac{\partial}{\partial t}+a^{20}\,\frac{\partial^2}{\partial y^2}\right]F^{20}=a^{00}\,\frac{1}{2}\left(y-\frac{1}{2}\right)^2. \end{gather}
This system of equations is then rearranged into a matrix equation  $M_{MMI}\boldsymbol {a}=\boldsymbol {b}$, which is solved for the coefficients in vector
$M_{MMI}\boldsymbol {a}=\boldsymbol {b}$, which is solved for the coefficients in vector  $\boldsymbol {a}=(a^{00},a^{10},a^{01},a^{20})^{\rm T}$. Note that this matrix equation is constructed over every point in space and time, so
$\boldsymbol {a}=(a^{00},a^{10},a^{01},a^{20})^{\rm T}$. Note that this matrix equation is constructed over every point in space and time, so  $\boldsymbol {a}=\boldsymbol {a}(y,t)$. In this work, analysis is done in self-similar coordinates, in which
$\boldsymbol {a}=\boldsymbol {a}(y,t)$. In this work, analysis is done in self-similar coordinates, in which  $\boldsymbol {a}=\boldsymbol {a}(\eta )$. If one wishes to construct a model with different moments, then the MMI operator and equations must be modified accordingly. For example, a model using only
$\boldsymbol {a}=\boldsymbol {a}(\eta )$. If one wishes to construct a model with different moments, then the MMI operator and equations must be modified accordingly. For example, a model using only  $D^{00}$ and
$D^{00}$ and  $D^{10}$ would have an MMI operator of the form
$D^{10}$ would have an MMI operator of the form  $1+a_{10}({\partial }/{\partial y})$ and use only the first two equations (with the
$1+a_{10}({\partial }/{\partial y})$ and use only the first two equations (with the  $a^{01}$ and
$a^{01}$ and  $a^{20}$ terms removed). Thus models using different combinations of moments would use different MMI coefficients
$a^{20}$ terms removed). Thus models using different combinations of moments would use different MMI coefficients  $a^{mn}$.
$a^{mn}$.
To summarize, for this implicit operator form, the following system of equations is solved in self-similar coordinates:
 \begin{gather} \mathcal{L}_{MMI}\left\{-\widehat{\langle v'Y_H' \rangle } \right\}=\widehat{a^{00}}\,\frac{{\rm d} \langle Y_H \rangle }{{\rm d} \eta}, \end{gather}
\begin{gather} \mathcal{L}_{MMI}\left\{-\widehat{\langle v'Y_H' \rangle } \right\}=\widehat{a^{00}}\,\frac{{\rm d} \langle Y_H \rangle }{{\rm d} \eta}, \end{gather} \begin{gather}\frac{{\rm d}}{{\rm d}\eta}\left(-\widehat{\langle v'Y_H' \rangle }\right) ={-}2\eta\,\frac{{\rm d}\langle Y_H \rangle }{{\rm d}\eta}, \end{gather}
\begin{gather}\frac{{\rm d}}{{\rm d}\eta}\left(-\widehat{\langle v'Y_H' \rangle }\right) ={-}2\eta\,\frac{{\rm d}\langle Y_H \rangle }{{\rm d}\eta}, \end{gather}
where  $\mathcal {L}_{MMI}$ is the MMI operator constructed using some combination of moments, such as in (5.10). Numerically, the following system is solved:
$\mathcal {L}_{MMI}$ is the MMI operator constructed using some combination of moments, such as in (5.10). Numerically, the following system is solved:
 \begin{gather} P\left(-\widehat{\langle v'Y_H' \rangle } \right)=\widehat{a^{00}}\,\mathcal{D_\eta}\langle Y_H \rangle , \end{gather}
\begin{gather} P\left(-\widehat{\langle v'Y_H' \rangle } \right)=\widehat{a^{00}}\,\mathcal{D_\eta}\langle Y_H \rangle , \end{gather} \begin{gather}\mathcal{D_\eta}\left(-\widehat{\langle v'Y_H' \rangle }\right) ={-}2\eta\mathcal{D_\eta}\langle Y_H \rangle , \end{gather}
\begin{gather}\mathcal{D_\eta}\left(-\widehat{\langle v'Y_H' \rangle }\right) ={-}2\eta\mathcal{D_\eta}\langle Y_H \rangle , \end{gather}
where  $P$ is the matrix representing the numerical MMI operator, and
$P$ is the matrix representing the numerical MMI operator, and  $\mathcal {D_\eta }$ is the matrix representing the numerical derivative with respect to
$\mathcal {D_\eta }$ is the matrix representing the numerical derivative with respect to  $\eta$. This can be rewritten as a block matrix–vector multiplication:
$\eta$. This can be rewritten as a block matrix–vector multiplication:
 \begin{equation} M \boldsymbol{x}= \begin{bmatrix} P & -\widehat{a^{00}}\,\mathcal{D_\eta}\\ \mathcal{D_\eta} & 2\eta\mathcal{D_\eta} \end{bmatrix} \begin{bmatrix} -\widehat{\langle v'Y_H' \rangle }\\ \langle Y_H \rangle \end{bmatrix} = \boldsymbol{b}, \end{equation}
\begin{equation} M \boldsymbol{x}= \begin{bmatrix} P & -\widehat{a^{00}}\,\mathcal{D_\eta}\\ \mathcal{D_\eta} & 2\eta\mathcal{D_\eta} \end{bmatrix} \begin{bmatrix} -\widehat{\langle v'Y_H' \rangle }\\ \langle Y_H \rangle \end{bmatrix} = \boldsymbol{b}, \end{equation}
where  $\boldsymbol {b}$ is a vector representing the right-hand side of (5.22), with the proper boundary conditions enforced. In this study, zero gradient boundary conditions are used for the turbulent scalar flux, and Dirichlet boundary conditions are used for the mean concentration. The system is solved using finite differences on a staggered mesh.
$\boldsymbol {b}$ is a vector representing the right-hand side of (5.22), with the proper boundary conditions enforced. In this study, zero gradient boundary conditions are used for the turbulent scalar flux, and Dirichlet boundary conditions are used for the mean concentration. The system is solved using finite differences on a staggered mesh.
Presented in this work are the determinants of the MMI matrix and resulting  $a_{mn}$ for two different combinations of moments. Figure 18 shows that with the combination of
$a_{mn}$ for two different combinations of moments. Figure 18 shows that with the combination of  $D^{00}$,
$D^{00}$,  $D^{10}$ and
$D^{10}$ and  $D^{01}$, the determinant of the MMI matrix is positive for all
$D^{01}$, the determinant of the MMI matrix is positive for all  $\eta$, so the
$\eta$, so the  $a_{mn}$ are all well-behaved. This is indicative of good model form. On the other hand, figure 19 shows that with the combination of
$a_{mn}$ are all well-behaved. This is indicative of good model form. On the other hand, figure 19 shows that with the combination of  $D^{00}$ and
$D^{00}$ and  $D^{01}$, the determinant of the MMI matrix crosses zero, so the
$D^{01}$, the determinant of the MMI matrix crosses zero, so the  $a_{mn}$ contain singularities that effect poor RANS predictions (observable in plots presented later). Singular matrices arising in the MMI solve for a certain form of the implicit operator form may indicate that form is poor, in the sense that the combination of moments does not make a good RANS model. Since MMI appears to be sensitive to the information that it takes in to determine the implicit operator coefficients, one must take special care and choose a model form that avoids this issue. It is found that MMI determinant zero crossings do not occur for any of the moment combinations tested in this work other than the
$a_{mn}$ contain singularities that effect poor RANS predictions (observable in plots presented later). Singular matrices arising in the MMI solve for a certain form of the implicit operator form may indicate that form is poor, in the sense that the combination of moments does not make a good RANS model. Since MMI appears to be sensitive to the information that it takes in to determine the implicit operator coefficients, one must take special care and choose a model form that avoids this issue. It is found that MMI determinant zero crossings do not occur for any of the moment combinations tested in this work other than the  $D^{00}$ and
$D^{00}$ and  $D^{01}$ combination, but it may happen with combinations of other higher-order moments not measured here.
$D^{01}$ combination, but it may happen with combinations of other higher-order moments not measured here.

Figure 18. (a) Determinant of  $M_{MMI}$ over
$M_{MMI}$ over  $\eta$ and (b–d) MMI coefficients
$\eta$ and (b–d) MMI coefficients  $\widehat {a^{mn}}$ over
$\widehat {a^{mn}}$ over  $\eta$ for the implicit operator form using
$\eta$ for the implicit operator form using  $D^{00}$,
$D^{00}$,  $D^{10}$ and
$D^{10}$ and  $D^{01}$.
$D^{01}$.

Figure 19. (a) Determinant of  $M_{MMI}$ over
$M_{MMI}$ over  $\eta$ and (b,c) MMI coefficients
$\eta$ and (b,c) MMI coefficients  $\widehat {a^{mn}}$ over
$\widehat {a^{mn}}$ over  $\eta$ for the implicit operator form using
$\eta$ for the implicit operator form using  $D^{00}$ and
$D^{00}$ and  $D^{01}$. Here,
$D^{01}$. Here,  $M_{MMI}$ is singular at the
$M_{MMI}$ is singular at the  $\eta$ at which its determinant crosses zero.
$\eta$ at which its determinant crosses zero.
Turbulent scalar fluxes computed using the implicit operator form are shown in figure 20. The implicit operator form's turbulent scalar flux prediction using just  $D^{00}$ is identical to that of the explicit operator form, by construction. It is apparent that adding either
$D^{00}$ is identical to that of the explicit operator form, by construction. It is apparent that adding either  $D^{10}$ or
$D^{10}$ or  $D^{01}$ alone is insufficient. As noted earlier, adding
$D^{01}$ alone is insufficient. As noted earlier, adding  $D^{01}$ leads to a particularly poor prediction due to singular MMI matrices at some
$D^{01}$ leads to a particularly poor prediction due to singular MMI matrices at some  $\eta$. The best match to DNS is attained using the combination
$\eta$. The best match to DNS is attained using the combination  $D^{00}$,
$D^{00}$,  $D^{10}$ and
$D^{10}$ and  $D^{01}$. In fact, it is evident that the implicit operator form using
$D^{01}$. In fact, it is evident that the implicit operator form using  $D^{00}$,
$D^{00}$,  $D^{10}$ and
$D^{10}$ and  $D^{01}$ predicts the turbulent scalar flux more accurately than the explicit operator form using the same moments. This is because the implicit operator form is designed to match the shape of the eddy diffusivity kernel, and the explicit operator form may not be accomplishing this.
$D^{01}$ predicts the turbulent scalar flux more accurately than the explicit operator form using the same moments. This is because the implicit operator form is designed to match the shape of the eddy diffusivity kernel, and the explicit operator form may not be accomplishing this.

Figure 20. Turbulent scalar flux predictions using the implicit operator form. Moments of eddy diffusivity used in the model are: (a)  $D^{00}$; (b)
$D^{00}$; (b)  $D^{00}, D^{10}$; (c)
$D^{00}, D^{10}$; (c)  $D^{00}, D^{01}$; (d)
$D^{00}, D^{01}$; (d)  $D^{00}, D^{10}, D^{01}$.
$D^{00}, D^{10}, D^{01}$.
These trends in the explicit and implicit operator forms can be observed again in the predictions of the mean concentration profile, shown in figure 21. In particular, the implicit operator form using  $D^{00}$,
$D^{00}$,  $D^{10}$ and
$D^{10}$ and  $D^{01}$ gives a very good prediction of the mean concentration that nearly overlaps the DNS measurement. For a clearer comparison of the explicit and implicit operator forms using these moments, figure 22 shows the derivatives of the DNS- and model-computed
$D^{01}$ gives a very good prediction of the mean concentration that nearly overlaps the DNS measurement. For a clearer comparison of the explicit and implicit operator forms using these moments, figure 22 shows the derivatives of the DNS- and model-computed  $\langle Y_H \rangle$. The implicit operator form predicts a magnitude and shape closer to the DNS measurement than the explicit operator form does. In particular, the implicit operator form captures the shape of the tails much better than the explicit operator form.
$\langle Y_H \rangle$. The implicit operator form predicts a magnitude and shape closer to the DNS measurement than the explicit operator form does. In particular, the implicit operator form captures the shape of the tails much better than the explicit operator form.

Figure 21. Mean concentration profile predictions using the implicit operator form. Moments of eddy diffusivity used in the model are: (a)  $D^{00}$; (b)
$D^{00}$; (b)  $D^{00}, D^{10}$; (c)
$D^{00}, D^{10}$; (c)  $D^{00}, D^{01}$; (d)
$D^{00}, D^{01}$; (d)  $D^{00}, D^{10}, D^{01}$.
$D^{00}, D^{10}, D^{01}$.

Figure 22. Derivatives of  $\langle Y_H \rangle$ computed using DNS (solid black), an explicit operator form (dashed blue), and an implicit operator form (dash-dotted red).
$\langle Y_H \rangle$ computed using DNS (solid black), an explicit operator form (dashed blue), and an implicit operator form (dash-dotted red).
6. Conclusion
In this assessment, it is determined that non-locality must be considered in developing more predictive models for RTI. The studies presented in this work are facilitated using MFM, a numerical tool for precisely measuring closure operators. Four of the eddy diffusivity moments of RTI ( $D^{00}$,
$D^{00}$,  $D^{10}$,
$D^{10}$,  $D^{01}$ and
$D^{01}$ and  $D^{20}$) are measured, and it is demonstrated that the higher-order moments, which contain information about the non-locality of the eddy diffusivity kernel, should not be neglected when constructing models for RTI.
$D^{20}$) are measured, and it is demonstrated that the higher-order moments, which contain information about the non-locality of the eddy diffusivity kernel, should not be neglected when constructing models for RTI.
Specifically, it is determined that  $D^{00}$,
$D^{00}$,  $D^{10}$ and
$D^{10}$ and  $D^{01}$ are the most important moments for constructing a model for RTI. Two methods for constructing RANS models using these moments are presented. First, an explicit operator form, based on a Kramers–Moyal-like expansion derived by taking the Taylor series expansion of the scalar gradient in the generalized eddy diffusivity, is described and tested. While incorporation of higher-order moments in the explicit operator form results in more accurate predictions than a leading-order model, there exist several issues. One problem is that the expansion used for the explicit operator form may not converge, so addition of higher-order moments leads to less accurate predictions. Another problem is that the explicit operator form is difficult to implement numerically.
$D^{01}$ are the most important moments for constructing a model for RTI. Two methods for constructing RANS models using these moments are presented. First, an explicit operator form, based on a Kramers–Moyal-like expansion derived by taking the Taylor series expansion of the scalar gradient in the generalized eddy diffusivity, is described and tested. While incorporation of higher-order moments in the explicit operator form results in more accurate predictions than a leading-order model, there exist several issues. One problem is that the expansion used for the explicit operator form may not converge, so addition of higher-order moments leads to less accurate predictions. Another problem is that the explicit operator form is difficult to implement numerically.
Thus an implicit operator form is presented to address these issues with the explicit operator form. Since an implicit operator form involves an invertible matrix operator, it is easier to implement than an explicit operator form. In addition, the proposed implicit operator form is designed to match the shape of the eddy diffusivity kernel via the MMI operator, in contrast to the explicit operator form, which truncates a non-converging Kramers–Moyal expansion. It is shown that the implicit operator form exhibits a marked improvement in predictions over the explicit operator form.
Incorporation of non-locality into RANS models via these operator forms comes with several challenges. For one, development of any new model must consider scalar realizability. While this is not thoroughly explored in this work, since an actual model is not yet proposed, one approach to preserve realizability is suggested by Braun & Gore (Reference Braun and Gore2021), where the turbulent scalar flux is rewritten as an advection-like term and added to the original advection term in order to enforce physical mean component mass fractions; a conservative numerical scheme maintains realizability. Further, the new model must be tested on more complex RTI for it to be useful in practical settings such as ICF. This includes assessment of the model for 3-D, finite Atwood and compressible (Richtmyer–Meshkov) flows. The model should be tested in the same validation cases as other models for RTI, such as the tilted rig (Denissen et al. Reference Denissen, Rollin, Reisner and Andrews2014) and gravity reversal (Banerjee, Gore & Andrews Reference Banerjee, Gore and Andrews2010). Based on these evaluations, which may also involve new MFM measurements where the method is extended to more complex flow regimes, the new model can be amended, as is the usual process of turbulence model development. This is left for future work, when a new model is developed based on the findings presented here.
One obstacle encountered in these studies is the inherent statistical error in the DNS computations. In particular, the higher-order moments contain high statistical error due to buildup of error from the lower-order moments on which they depend. Because of this, it is admittedly difficult to draw definite conclusions about the effect of higher-order moments beyond the first-order moments. That is, due to the statistical error, it is currently unclear if inclusion of moments beyond first order in a RANS model would significantly improve its predictions, or if just the first-order temporal and spatial moments along with the leading-order moment are sufficient. This motivates development of a technique to accelerate the statistical convergence of these higher-order moments. Such a method could also be used to study the effect of other higher-order moments that were not measured in this present work, since they would have suffered from high statistical error with the current method.
It must be stressed that the results in this work are for 2-D RTI and should not be applied directly to three dimensions. As noted previously, the third spatial dimension significantly impacts the turbulent physics of RTI. In particular, 3-D RTI has a lower growth rate than 2-D RTI, so lower magnitudes of the eddy diffusivity moments are expected in three dimensions. Despite the quantitative difference in physics between two and three dimensions, they are qualitatively similar in the RANS space, so trends in the shapes of the eddy diffusivity moments are expected to persist in three dimensions. In other words, the form of the turbulent scalar flux closure in three dimensions is expected to be the same as in two dimensions, but the coefficients would be different. These expected trends are yet to be confirmed, and future work should involve applying MFM to 3-D RTI.
Through this work, an understanding of non-locality in 2-D RTI has been developed. It has been shown that incorporation of information about the non-locality of the eddy diffusivity may greatly improve the accuracy of a RANS model. This work demonstrates this by testing operators using MFM measurements of the non-local eddy diffusivity. In practice, a RANS model for RTI would not have to rely on these MFM measurements directly; one would not have to perform many MFM simulations to construct a model. In other words, MFM should be seen as a diagnostic tool rather than the means for building the actual model. The ultimate goal is to develop an improved, more predictive model for RTI by incorporating non-local information, which the present work has demonstrated to be significant for accurate prediction of mean scalar transport in 2-D RTI.
Funding
This work was performed under the auspices of the US Department of Energy by Lawrence Livermore National Laboratory under contract no. DE-AC52-07NA27344. D.L. was additionally supported by the Charles H. Kruger Stanford Graduate Fellowship. J.L. was additionally supported by the Burt and Deedee McMurtry Stanford Graduate Fellowship.
Declaration of interests
The authors report no conflict of interest.
Appendix A. Non-dimensionalizations
To determine the non-dimensionalizations in (3.24)–(3.28), a self-similarity analysis is performed. The following self-similarity coordinate is used:
 \begin{equation} \eta = \frac{y}{{h_{fit}}(t)} = \frac{y}{\alpha^*Ag(t-t^*)^2}. \end{equation}
\begin{equation} \eta = \frac{y}{{h_{fit}}(t)} = \frac{y}{\alpha^*Ag(t-t^*)^2}. \end{equation}
To perform transformations to this self-similar space, all derivatives are written in terms of  $\eta$:
$\eta$:
 \begin{gather} \frac{\partial}{\partial t} ={-}\frac{2\eta}{t-t^*}\,\frac{{\rm d}}{{\rm d} \eta}, \end{gather}
\begin{gather} \frac{\partial}{\partial t} ={-}\frac{2\eta}{t-t^*}\,\frac{{\rm d}}{{\rm d} \eta}, \end{gather} \begin{gather}\frac{\partial}{\partial y} = \frac{1}{\alpha^*Ag(t-t^*)^2}\,\frac{{\rm d}}{{\rm d} \eta}, \end{gather}
\begin{gather}\frac{\partial}{\partial y} = \frac{1}{\alpha^*Ag(t-t^*)^2}\,\frac{{\rm d}}{{\rm d} \eta}, \end{gather} \begin{gather}\frac{\partial^2}{\partial t\,\partial y} ={-}\frac{2}{\alpha^*Ag(t-t^*)^3}\left(\frac{\partial}{{\rm d} \eta} + {\eta}\,\frac{{\rm d}^2}{{\rm d} \eta^2}\right). \end{gather}
\begin{gather}\frac{\partial^2}{\partial t\,\partial y} ={-}\frac{2}{\alpha^*Ag(t-t^*)^3}\left(\frac{\partial}{{\rm d} \eta} + {\eta}\,\frac{{\rm d}^2}{{\rm d} \eta^2}\right). \end{gather}To non-dimensionalize the eddy diffusivity moments, (3.6) is substituted into (3.3):
 \begin{equation} \frac{\partial \langle Y_H \rangle }{\partial t} = \frac{\partial}{\partial y}\left(D^{00}\,\frac{\partial \langle Y_H \rangle }{\partial y} + D^{10}\,\frac{\partial^2 \langle Y_H \rangle }{\partial y^2} + D^{01}\,\frac{\partial^2 \langle Y_H \rangle }{\partial t \partial y} + D^{20}\,\frac{\partial^3 \langle Y_H \rangle }{\partial y^3}+\cdots\right). \end{equation}
\begin{equation} \frac{\partial \langle Y_H \rangle }{\partial t} = \frac{\partial}{\partial y}\left(D^{00}\,\frac{\partial \langle Y_H \rangle }{\partial y} + D^{10}\,\frac{\partial^2 \langle Y_H \rangle }{\partial y^2} + D^{01}\,\frac{\partial^2 \langle Y_H \rangle }{\partial t \partial y} + D^{20}\,\frac{\partial^3 \langle Y_H \rangle }{\partial y^3}+\cdots\right). \end{equation}The equation is then transformed to self-similar space:
 \begin{align} -\frac{2\eta}{t-t^*}\,\frac{{\rm d} \langle Y_H \rangle }{{\rm d} \eta} &= \frac{1}{\alpha^*Ag(t-t^*)^2}\,\frac{{\rm d}}{{\rm d} \eta}\left[ \frac{1}{\alpha^*Ag(t-t^*)^2}\,D^{00}\,\frac{{\rm d} \langle Y_H \rangle }{{\rm d} \eta} \right.\nonumber\\ &\quad +\frac{1}{{\alpha^*}^2A^2g^2(t-t^*)^4}\,D^{10}\,\frac{{\rm d}^2 \langle Y_H \rangle }{{\rm d} \eta^2}\nonumber\\ &\quad -\frac{2}{\alpha^*Ag(t-t^*)^3}\,D^{01}\left(\frac{{\rm d} \langle Y_H \rangle }{{\rm d} \eta} + \eta\,\frac{{\rm d}^2 \langle Y_H \rangle }{{\rm d} \eta^2}\right) \nonumber\\ &\quad \left.{}+\frac{1}{{\alpha^*}^3A^3g^3(t-t^*)^6}\,D^{20}\,\frac{{\rm d}^3 \langle Y_H \rangle }{{\rm d} \eta^3}+\cdots \right]. \end{align}
\begin{align} -\frac{2\eta}{t-t^*}\,\frac{{\rm d} \langle Y_H \rangle }{{\rm d} \eta} &= \frac{1}{\alpha^*Ag(t-t^*)^2}\,\frac{{\rm d}}{{\rm d} \eta}\left[ \frac{1}{\alpha^*Ag(t-t^*)^2}\,D^{00}\,\frac{{\rm d} \langle Y_H \rangle }{{\rm d} \eta} \right.\nonumber\\ &\quad +\frac{1}{{\alpha^*}^2A^2g^2(t-t^*)^4}\,D^{10}\,\frac{{\rm d}^2 \langle Y_H \rangle }{{\rm d} \eta^2}\nonumber\\ &\quad -\frac{2}{\alpha^*Ag(t-t^*)^3}\,D^{01}\left(\frac{{\rm d} \langle Y_H \rangle }{{\rm d} \eta} + \eta\,\frac{{\rm d}^2 \langle Y_H \rangle }{{\rm d} \eta^2}\right) \nonumber\\ &\quad \left.{}+\frac{1}{{\alpha^*}^3A^3g^3(t-t^*)^6}\,D^{20}\,\frac{{\rm d}^3 \langle Y_H \rangle }{{\rm d} \eta^3}+\cdots \right]. \end{align}Rearranging,
 \begin{align} -2\eta\,\frac{{\rm d} \langle Y_H \rangle }{{\rm d} \eta} &= \frac{{\rm d}}{{\rm d} \eta}\left[ \frac{1}{{\alpha^*}^2A^2g^2(t-t^*)^3}\,D^{00}\,\frac{{\rm d} \langle Y_H \rangle }{{\rm d} \eta} \right.\nonumber\\ &\quad +\frac{1}{{\alpha^*}^3A^3g^3(t-t^*)^5}\,D^{10}\,\frac{{\rm d}^2 \langle Y_H \rangle }{{\rm d} \eta^2} \nonumber\\ &\quad -\frac{2}{{\alpha^*}^2A^2g^2(t-t^*)^4}\,D^{01}\left(\frac{{\rm d} \langle Y_H \rangle }{{\rm d} \eta} + \eta\,\frac{{\rm d}^2 \langle Y_H \rangle }{{\rm d} \eta^2}\right) \nonumber\\ &\quad \left.+\frac{1}{{\alpha^*}^4A^4g^4(t-t^*)^7}\,D^{20}\frac{{\rm d}^3 \langle Y_H \rangle }{{\rm d} \eta^3}+\cdots \right]. \end{align}
\begin{align} -2\eta\,\frac{{\rm d} \langle Y_H \rangle }{{\rm d} \eta} &= \frac{{\rm d}}{{\rm d} \eta}\left[ \frac{1}{{\alpha^*}^2A^2g^2(t-t^*)^3}\,D^{00}\,\frac{{\rm d} \langle Y_H \rangle }{{\rm d} \eta} \right.\nonumber\\ &\quad +\frac{1}{{\alpha^*}^3A^3g^3(t-t^*)^5}\,D^{10}\,\frac{{\rm d}^2 \langle Y_H \rangle }{{\rm d} \eta^2} \nonumber\\ &\quad -\frac{2}{{\alpha^*}^2A^2g^2(t-t^*)^4}\,D^{01}\left(\frac{{\rm d} \langle Y_H \rangle }{{\rm d} \eta} + \eta\,\frac{{\rm d}^2 \langle Y_H \rangle }{{\rm d} \eta^2}\right) \nonumber\\ &\quad \left.+\frac{1}{{\alpha^*}^4A^4g^4(t-t^*)^7}\,D^{20}\frac{{\rm d}^3 \langle Y_H \rangle }{{\rm d} \eta^3}+\cdots \right]. \end{align}
This reveals non-dimensionalizations for the eddy diffusivity moments. The prefactors to the derivatives of  $\langle Y_H \rangle$ on the right-hand side are denoted as the normalized eddy diffusivity moments
$\langle Y_H \rangle$ on the right-hand side are denoted as the normalized eddy diffusivity moments  $\widehat {D^{mn}}$.
$\widehat {D^{mn}}$.
The turbulent scalar flux scales with the leading-order term in (3.6). Substitution of the non-dimensionalization for  $D^{00}$ (3.25) into the leading-order term in (3.6) and transformation to self-similar coordinates gives the scaling for the turbulent scalar flux:
$D^{00}$ (3.25) into the leading-order term in (3.6) and transformation to self-similar coordinates gives the scaling for the turbulent scalar flux:
 \begin{equation} -\langle v'Y_H' \rangle \sim {\alpha^*}Ag(t-t^*)\,\widehat{D^{00}}\,\frac{{\rm d}\langle Y_H \rangle }{{\rm d} \eta}. \end{equation}
\begin{equation} -\langle v'Y_H' \rangle \sim {\alpha^*}Ag(t-t^*)\,\widehat{D^{00}}\,\frac{{\rm d}\langle Y_H \rangle }{{\rm d} \eta}. \end{equation} Figure 23 shows the unscaled moments measured directly from the MFM simulations. The profiles are taken from the portion of the simulation where the flow is self-similar ( $\tau \gtrapprox 17$). It is obvious that without normalizing the moments as described above, there is no self-similar collapse. The moments are scaled and plotted against
$\tau \gtrapprox 17$). It is obvious that without normalizing the moments as described above, there is no self-similar collapse. The moments are scaled and plotted against  $\eta$ in figure 24 to demonstrate the self-similar collapse. The normalized turbulent scalar flux and mean concentration profiles are shown in figures 25 and 26, also showing self-similar collapse.
$\eta$ in figure 24 to demonstrate the self-similar collapse. The normalized turbulent scalar flux and mean concentration profiles are shown in figures 25 and 26, also showing self-similar collapse.

Figure 23. Unscaled moments at different times over  $x$. Dimensions of the moments are as follows:
$x$. Dimensions of the moments are as follows:  $D^{00}$ is
$D^{00}$ is  ${\rm m}^2\,{\rm s}^{-1}$;
${\rm m}^2\,{\rm s}^{-1}$;  $D^{10}$ is
$D^{10}$ is  ${\rm m}^3\,{\rm s}^{-1}$;
${\rm m}^3\,{\rm s}^{-1}$;  $D^{01}$ is
$D^{01}$ is  ${\rm m}^2$; and
${\rm m}^2$; and  $D^{20}$ is
$D^{20}$ is  ${\rm m}^4\,{\rm s}^{-1}$. Red profiles are from early times, and cyan profiles are from late times, when the flow is self-similar. Lighter lines correspond to later times; darker lines correspond to earlier times.
${\rm m}^4\,{\rm s}^{-1}$. Red profiles are from early times, and cyan profiles are from late times, when the flow is self-similar. Lighter lines correspond to later times; darker lines correspond to earlier times.

Figure 24. Self-similar collapse of moments. All  $\widehat {D^{mn}}$ are dimensionless. Red profiles are from early times, and cyan profiles are from late times, when the flow is self-similar. Lighter lines correspond to later times; darker lines correspond to earlier times.
$\widehat {D^{mn}}$ are dimensionless. Red profiles are from early times, and cyan profiles are from late times, when the flow is self-similar. Lighter lines correspond to later times; darker lines correspond to earlier times.

Figure 25. Self-similar collapse of turbulent scalar flux. Here,  $-\widehat {\langle v'Y_H' \rangle }$ is dimensionless. Red profiles are from early times, and cyan profiles are from late times, when the flow is self-similar. Lighter lines correspond to later times; darker lines correspond to earlier times.
$-\widehat {\langle v'Y_H' \rangle }$ is dimensionless. Red profiles are from early times, and cyan profiles are from late times, when the flow is self-similar. Lighter lines correspond to later times; darker lines correspond to earlier times.

Figure 26. Mean concentration profiles at different times. Red profiles are from early times, and cyan profiles are from late times, when the flow is self-similar. Lighter lines correspond to later times; darker lines correspond to earlier times.


















































































































 Open access
Open access