



1. Introduction
Up to now, many simple closed mechanisms with less basic links such as planar mechanisms, parallel mechanisms, and hybrid mechanisms have been synthesized and applied. The creative design of complex closed mechanisms with more mechanical advantages has been believed as one of the most important branches in the theory of mechanisms. The type synthesis of mechanisms is its theoretical base and is toward the intelligent design theories [Reference Yang, Ding and Kecskeméthy1]. In this aspect, Li et al. [Reference Li, Fang, Yao and Wang2] synthesized a family of 3 degrees of freedom (DOF) parallel leg mechanisms, which consists of a 3-DOF drive system and a walking mechanism in order to increase workspace and simplify control system of traditional parallel mechanisms. Shi et al. [Reference Shi, Guo, Zheng, Li, Liu and Deng3] developed a method for the design of large aerospace deployable mechanisms by combining graph properties, weighted adjacency matrixes; presented a fundamental topological graph to describe joint connections; and established the identification of kinematic joints. Chi et al. [Reference Chi, Teeranoot and Wang4] developed a compliant gripper with nearly parallel gripping motion using topology and dimensional synthesis approach, selected a nondominated multi-objective genetic algorithm for the optimal design process to meet various design goals, and developed a kinetostatic model based on the chained beam constraint model for force-displacement analysis of the designs. Chinvorarat et al. [Reference Chinvorarat and Vallikul5] presented a retractable main landing gear for a light amphibious airplane, while the design, synthesis, and analysis are given for constructing the main landing gear. The constraint three-position synthesis has given the correct path of all linkages that suitably fit the landing gear into the compartment. Parlaktas [Reference Parlaktaş6] studied a synthesis method for a certain type of geared adjustable stroke mechanism, developed the synthesis procedures for possible largest stroke, and prepared design charts for maximum stroke configuration. Yang and Jin [Reference Yang7] studied topology structure design of robot mechanisms and provided valuable design theoretical methods for the robot mechanisms. Gogu [Reference Gogu8] conducted structural synthesis of parallel robots using morphological and evolutionary approaches and designed many valuable different parallel robots. Huang, et al. [Reference Huang9] studied theory of loop algebra of multi-loop kinematic chains and derived an important formula to solve the degree of freedom DOF of mechanisms with redundant constraints and passive DOF. Kong and Gosselin [Reference Kong and Gosselin10] conducted the topological synthesis and type synthesis of parallel mechanisms based on screw theory and synthesized several valuable parallel mechanisms. The topology graph TG and the contracted graphs CG are an effective tool for type synthesis of the complex closed mechanisms. Let (b, t, q, p, h) be (binary, ternary, quaternary, pentagonal, hexagonal) link, respectively. In the aspect of TG and CG, Johnson [Reference Johnson11], Freudenstein [Reference Vucina and Freudenstein12], Tsai [Reference Tsai13] studied TG excluding b, variable topological representations and characteristics of variable kinematic joints, and generated following specification of the design goals and restrictions, the potentially useful kinematic structures with the aid of graph theory. Sun et al. [Reference Sun, Cui, Yang, Ye, Zhou and Wu14] presented an automatic method to synthesize CG of planar kinematic chains. Lu et al. derived CG using simple CG [Reference Lu, Yang Lu, Mao, Han and Sui15], and derived TGs with high complexity coefficient from associated linkage [Reference Lu, Ye and Zhang16]. Above studies provide the theoretical foundation for the type synthesis of various complex closed mechanisms. Generally, various complex closed mechanisms may have more mechanical advantages such as enlarging output power, increasing (the structure strength, rigidity, stability), increasing the traveling length or the rotation speed of output link, reducing volume/vibration, and so on. Therefore, it has been a significant and challenging issue to create more novel complex closed robotic mechanisms with more mechanical advantages and useful functions such as forge operator with multi-fingers, rescue robot, robotic gripper, humanoid flexible robotic hand and leg, artificial heart, flexible airfoil, long-stroke pumping unit, and tunnel excavator with multi-supporter and so on.
Generally, various complex TG may include (b, t, q, p, h, …). The various complex CG may include (t, q, p, h, …) and exclude b. Therefore, the derivation and the isomorphism identification of various complex TGs and CGs are quite complicated [Reference Lu, Ye and Zhang16]. For this reason, a high-contracted topology graph G j/i including (q, p, h, …) is proposed for the derivation and isomerism identification of various TGs and type synthesis of complex closed mechanisms in this paper. Since G j/i excludes (b, t), G j/i must be more simple than both TG and CG, and the derivation and isomorphism identification of various G j/i must be more easily than that of both TG and CG. Thus, various TG can be derived by adding (b, t) into G j/i, and many isomorphism identifications of TG can be avoided. Therefore, it is a significant issues to derive various G j/i and identify their isomorphism. In this paper, the conceptions and the derivation of G j/i are studied. Many different G j/i (j = 0, …, 17; i = 1, …, 94) are derived using the character strings and the digit groups, and the relative rules and condition are determined for deriving G j/i and identifying their isomorphism. Three novel complex closed mechanisms are synthesized using two derived G 7/7 and G 11/11.
2. Conceptions of G j/i and derivation/isomorphism identification of simple G j/i
2.1. Conceptions of Gj/i and relations between Gj/i and basic links
Some relative symbols are explained as below:
e – edge (single curve) in high-contracted topology graph; v – vertex;
b – binary link represented by v adjacent 2e; t – ternary link represented by v adjacent 3e;
q – quaternary link represented by v adjacent 4e; p – pentagonal link represented by v adjacent 5e;
h – hexagonal link represented by v adjacent 6e; n b, n t, n q, n p, n h – the number of (b, t, q, p, h);
G j/i – high-contracted topology graph excluding (b, t); j – complexity index of G j/i; n e – the number of edges in G j/i, n e = (4n q + 5n p + 6n h+ …)/2; n – the number of basic links in G j/i, n= n q + n p + n h + …;
c k – composite curve formed by k (k = 1, …, 6) parallel edges.
A high-contracted topology graph G j/i includes n (q, p, h, …) and excludes both b and t. Here, The subscript j is a complexity index of G j/i, it is increased from 0. n e in G j/i is solved by n e=(4n q + 5n p + 6n h+ …)/2. When n e or n are increased, the complexity of G j/i is increased. A G j/i including n= n q + n p + n h + … basic links can be constructed using a circle and n v connected by n e edges. Since n v are arranged uniformly on the circle, the circle can be divided into n sections used as n edges of n e for constructing G j/i. If n e is an integral number, G j/i can be formed. The G j/i (j = 0, …, 17; i = 1, …) including {n= (2, 3, 4, 5) and (q, p, h)} are listed in Table I. For example, G 4/i includes {q + 2p+ h, n q = n h = 1, n p = 2, n= n q + n p + n h = 4, n e = (4n q + 5n p + 6n h)/2 = 10}. G 14/i includes {q + 2p + 2h, n q = 1, n p = n h = 2, n = 5, n e = 13}.
Table I. Valid G j/i and their characteristics.

2.2. Constructing and representing simple Gj/i by character strings and digit groups
Several simple valid G 0/i including n= (2, 3) are constructed easily using a circle and (2, 3) v on the circle and several edges, see Fig. 1.

Figure 1. Several simple G 0/i (i = 1, …, 9).
The numbers of (c k, q, p, h) in G 0/i (i = 1, …, 9) are determined easily, see Table II.
Table II. G 0/i (i = 1, …, 9) including basic links (q, p, h) and c k.

However, when G j/i include n≥ 4 basic links (q, p, h, …), j increases from 1 and G j/i become more complex. Meanwhile, deriving the complex G j/i (j = 1, …; i = 1, …) and reducing their isomerism become more difficult. In order to derive the complex G j/i, reduce their isomerism, and identify their isomerism, some character strings and the digit groups are used to derive the complex G j/i, as explained below.
Generally, n (q, p, h, …) in G j/i with n (q, p, h, …) can be represented by several different valid character strings. Each valid character string is arranged excluding (repeating, circulating, reversing) order. Thus, many isomorphism G j/i can be avoided for identifying isomorphism G j/i.
Each valid character string may be represented by many different digit groups. Many different valid digit groups can be derived from one character string of n (q, p, h, …) in G j/i based on the following six rules:
Rule 1. Each digit group is composed of n sub-digit groups for representing n basic links.
Rule 2. Each of the n sub-digit groups is composed of n − 1 digits for representing the number of the edges, by which one basic link is connected with the other n− 1 basic links in clockwise.
Rule 3. The digit sum of one sub-digital group for representing one basic link is the edge number of the same basic link. The digit sum of the n sub-digit groups is 2n e.
Rule 4. The last digit of a sub-digit group is same as the first digit of the next sub-digital group. The first digit of the first sub-digital group is same as the last digit of the final sub-digit group.
Rule 5. There must be a same digit between different groups.
Rule 6. In order to derive all different digit groups of the same character string, among the different digit groups, the digits in the first sub-digit group are placed in the order from the minimum to maximum values. If the first sub-digit group is same, then the second sub-digit group is placed in the order from the minimum to maximum values. The order of digit groups excludes (repeating, circulating, reversing) order for reducing the isomorphism G j/i.
Using the above six rules, the character strings and the digit groups for representing G j/i (j = 1, 2, 3; i = 1, …, 10) are given in Table III, and symmetry G j/i can be avoided. Thus, various G j/i can be represented by the character string and the digit group. Next, the derivation and the isomorphism identification of various G j/i can be completed automatically using the compiled computer program in the intelligent design.
Table III. The character string and digit groups G j/i (j = 1, 2, 3; i = 1, …, 11).

Example 1. G 1/i (i = 1, …, 6) includes n = 4 basic links 4q, see Table I. G 1/i can be represented by one character string qqqq. Based on above six rules, (q 1, q 2, q 3, q 4) can be represented by six different digit groups {(103, 301, 103, 301), (112, 211, 112, 211), (121, 121, 121, 121), (202, 202, 202, 202), (211, 112, 211, 112), (301, 103, 301, 103)}.
Based on the rule 1, each of six digit groups is composed of n = 4 sub-digit groups for representing n = 4 basic links of G 1/i (i = 1, …, 6).
Based on the rule 2, each of the sub-digit groups is composed of n− 1 = 3 digits to represent the number of edges, by which one basic link connects with other n− 1 = 3 basic links. In the first digit group (103, 301, 103, 301), the first sub-digit group 103 represents that q 1 clockwise connects with (q 4, q 3, q 2) by (1, 0, 3)e, respectively. The second sub-digit group 301 represents that q 2 connects with (q 1, q 4, q 3) by (3, 0, 1)e, respectively. The third sub-digit group 103 represents that q 3 connects with (q 2, q 1, q 4) by (1, 0, 3)e, respectively. The last sub-digit group 301 represents that q 4 connects with (q 3, q 2, q 1) by (3, 0, 1)e, respectively, see G 1/1 in Fig. 3.
Based on rule 3, the digit sum of n sub-digit groups is 2n e = 16, (n e = 4n q/2 = 2n q = 8).
Based on rule 6, the first sub-digit group of six different digit groups is placed in the order from the minimum value 103 to the maximum value 301, see the first column in Table III, symmetry G j/i can be avoided.
Thus, six different G 1/i (i = 1, …, 6) can be derived by above six different digit groups, respectively.
In addition, digit order of each sub-digit groups in the first digit group (103, 301, 103, 301) is reversing order of the sub-digit groups in the last digit group (301, 103, 301, 103). Based on rule 6, G 1/1 and G 1/6 are mutual isomorphism. Similarly, G 1/2 and G 1/5 are mutual isomorphism. Thus, G 1/5 and G 1/6 should be deleted.
Although the character string (q, q, q, q) can also be represented by a digit group (211, 121, 121, 112) based on 5 rules, G 1/i cannot be derived from (211, 121, 121, 112), which is an invalid digit group and must be deleted.
Based on digit groups in Table III, G j/i (j = 1, 2, 3; i = 1, …, 10) are constructed using following steps:
-
1. Uniformly counterclockwise arrange n v for n basic links in G j/i on the circle circumference.
-
2. Construct each of G j/i (j = 1, 2, 3; i = 1, …, 11) using each of different valid digit groups, see Fig. 2.

Figure 2. G j/i (j = 1, 2, 3; i = 1, …, 11).
Example 2. G 2/i (i = 3, …, 10) include 2q + 2p and n = 4, see Table I. G 2/i can be represented by two different character strings (q, q, p, p) and (q, p, q, p). Based on above six rules, (q, q, p, p) of G 2/i (i = 3, …, 8) can be represented by six different digit groups. The first sub-digit group of the six different digit groups is placed in the order from the minimum value (103) to the maximum value (301), see the second column in Table III. (q, p, q, p) of G 2/i (i = 9, 10, 11) can be represented by three different digit groups, see Table III.
2.3. Isomorphism identification of several simple G j/i
An isomorphism condition of both G j/x and G j/y is discovered as below,
If both G j/x and G j/y simultaneously include the same group of basic links (q, p, h, …), the same number of c k, and the same connection of all basic links, then G j/x and G j/y are mutual isomorphism, which is represented by Y. Otherwise, G j/x and G j/y are mutual isomerism, which is represented by N.
All G 0/i (i = 1, …, 9) are mutual isomerism and can be identified easily based on Table II and the condition of isomorphism identification. Several isomorphisms of G j/i (j = 1, 2, 3; i = 1, …, 10) are identified based on Table IV and the condition of isomorphism identification, see Fig. 3.
Table IV. The results of isomorphism identification of G j/i (j = 1, 2, 3; i = 1, …, 9), Y-isomorphism, N-isomerism.


Figure 3. Isomorphism identification of G j/i (j = 1, 2, 3; i = 1, …, 9) based on the same connection of all c k in G j/i.
For example, both G 1/i (i = 1, 6) include (q 1, q 2, q 3, q 4), (2c 3, 2c 1), and the same connection of all basic links (q 1 is connected with q 2 by 1c 3, q 2 is connected with q 3 by 1c 3, q 3 connects with q 4 by 1c 3, q 4 is connected with q 1 by 1c 1); therefore, G 1/i (i = 1, 6) are mutual isomerism. Similarly, G 1/i (i = 2, 3, 5) include (q 1, q 2, q 3, q 4), (2c 2, 2c 1), and the same connection of all basic links (q 1 is connected with q 2 by 1c 2, q 2 is connected with q 3 by 1c 1, q 3 connects with q 4 by 1c 2, q 4 is connected with q 1 by 1c 1), therefore, G 1/i (i = 2, 3, 5) are mutual isomerism, see Fig. 3.
Let TGx be a topology graph derived from C j(k)x, TGy be a topology graph derived from C j(k)y. If C j(k)x and C j(k)y are mutual isomerism, any TGx and any TGy must be mutual isomerism. If C j(k)x and C j(k)y are mutual isomorphism, any TGx and any TGy may be mutual isomorphism. Thus, the complex derivation and isomorphism identification of TG can be replaced by the simple derivation and isomorphism identification of G j/i.
3. Constructing/representing G j/i (j = 4, 5, … 11) and their isomorphism identification
Using the six rules in Section 2.2, the character strings and the digit groups for representing G j/i (j = 4, 5, 6; i = 1, …, 19) are given in Table V. Using digit groups in Table V, G j/i (j = 4, 5, 6; i = 1, …, 19) are constructed, see Fig. 4. Based on the condition of isomorphism identification, several isomorphisms of G j/i (j = 1, 2, 3; i = 1, …, 10) are identified, see Table VI.
Table V. Character string and digit groups for deriving G j/i (j = 4, 5, 6; i = 1, …, 19).

Table VI. Results of isomorphism identification of G j/i (j = 4, 5, 6; i = 1, …, 18) (Y-isomorphism, N-isomerism).


Figure 4. G j/i (j = 4, 5, 6; i = 1, …, 19).
Using the six rules in Section 2.2, the character strings and the digit groups for representing G j/i (j = 7, …, 10; i = 1, …, 26) are given in Table VII. Based on digit groups in Table VII, G j/i (j = 7, …, 10; i = 1, …, 26) are constructed, see Fig. 5. Several isomorphism of G j/i (j = 7, …, 10; i = 1, …, 26) are identified, see Table VIII.

Figure 5. G j/i (j = 7, 8, 9, 10; i = 1, …, 26).
Table VII. Character strings and digit groups for deriving G j/i (j = 7, …, 10; i = 1, …, 26).

Table VIII. Results of isomorphism identification of G j/i (j = 7, …, 10; i = 1, …, 26) (Y-isomorphism, N-isomerism).

Similarly, using the six rules in Section 2.2, the character strings and the digit groups for representing G 11/i (i = 1, …, 28) are given in Table IX. Similarly, based on the digit groups in Table IX, G 11/i (i = 1, …, 28) with 3q + 2h are constructed, see Fig. 6. The isomorphisms of G 11/i (i = 1, …, 28) are determined, see Table X.
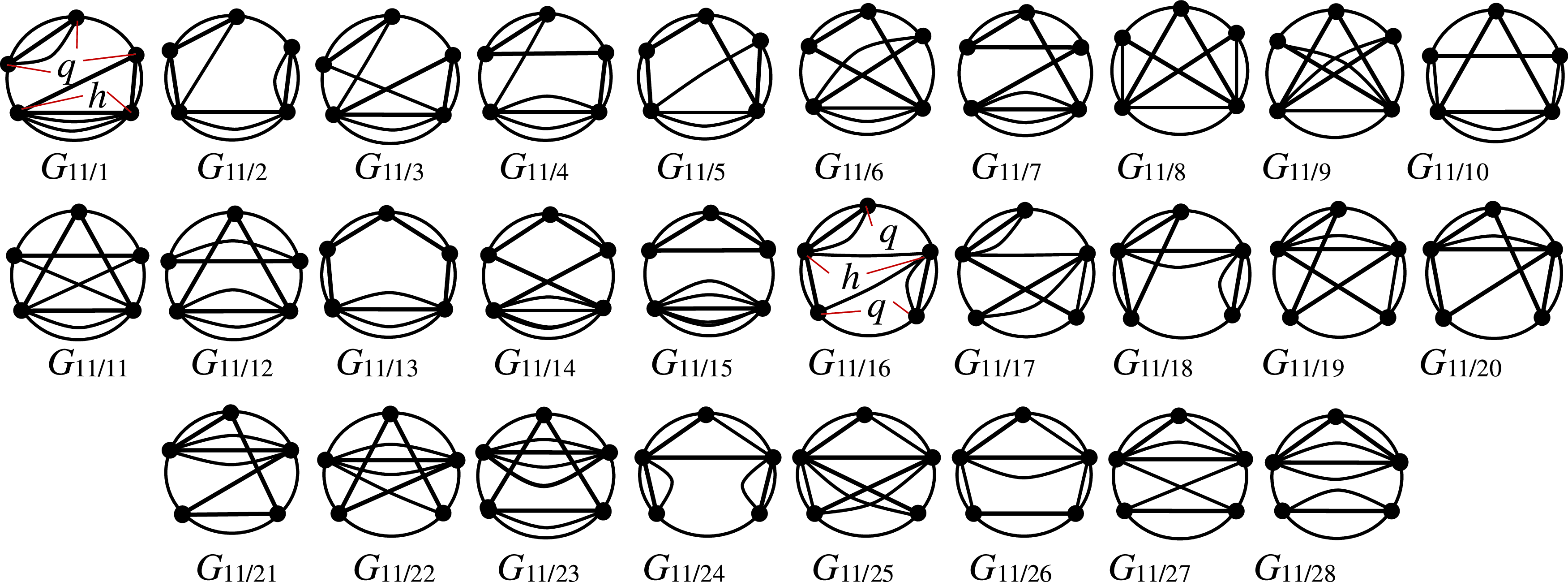
Figure 6. G 11/i (i = 1, …, 28).
Table IX. The character string and digit groups G 11/i (i = 1, …, 28).

Table X. Results of isomorphism identification for deriving G 11/i (i = 1, …, 28) (Y-isomorphism, N-isomerism).

The Constructing/representing G j/i (j = 12, 13, …, 17) and their isomorphism identification are given in Appendix. Similarly, more valid G j/i including n≥ 6 and (q, p, h, …) can be derived, and their derivations will be studied in further.
4. Creation examples of complex closed mechanisms using G j/i
Let M be the degrees of freedom (DOF) of mechanism, ( R , P , R, P, S, U) be (active revolute, active prismatic, revolute, prismatic, spherical, universal) joint, respectively. Let N j be the number of kinematic pairs, N l be the number of links, f j be the local DOF of the jth kinematic pair in mechanism, ζ be passive degree of freedom, υ be redundant constraint, c be complexity coefficient of mechanism.
Many new TG can be created by adding t into the valid G j/i using the derivation method of valid CG from simpler CG for type synthesis of closed mechanisms by adding edge [Reference Lu, Yang Lu, Mao, Han and Sui15]. In this section, three complex closed mechanisms are created using G 7/7 and G 11/11, respectively, and explained as follows.
Example 1. When a complex closed planar mechanism of the robotic gripper with three jaws is synthesized using G 7/7 with 5q and 10e, (n t = n p = n h = 0, n q = 5) are satisfied, see Fig. 7a. It is known from [Reference Huang9] that when a planar mechanism includes n c = 6 independent closed loops, υ is υ = 3n c = 18. It is known from [Reference Lu, Ye and Zhang16] that c is c = 5 for G 7/7 with 5q. Thus, if (M, ζ) are (M = 1, ζ = 0), n b can be solved using a formula in [Reference Lu, Ye and Zhang16] as below,

Figure 7. G 7/7 with 5q (a), TG with 5q + 9b (b), a planar mechanism of robotic gripper (c), (d). I – gear pair, II – motor, III – jaw, IV – object, q 1 – base, (q 2, q 3, q 4, q 5) – gear.
n b = 6 + M + 5c− υ+ ζ− (n t + n q + n p + n h) = 6 + 1 + 5 × 5 − 18 + 0 − 5 = 9.
After that, nine binary links b are distributed onto 10 e of G 7/7, see Fig. 7a. Here, the digit on each of e represents the number of b connected in series in G 7/7. A TG with 5q + 9b is derived using G 7/7, see Fig. 7b. It includes six independent closed loops. It is known from [Reference Johnson11] that any independent closed loop formed by four basic links connected by four joints can be replaced by a gear pair. Therefore, the first closed loop formed by four basic links (q 1, q 2, q 3, l 3) is replaced by the gear pair, in which the gear q 2 is meshed with the gear q 3. The second closed loop formed by (q 2, l 1, q 5, l 2) is replaced by the gear pair, in which the gear q 2 is meshed with the gear q 5. The third closed loop formed by (q 3, l 4, q 4, l 5) is replaced by the gear pair, in which the gear q 3 is meshed with the gear q 4. Thus, a complex closed planar mechanism of the robotic gripper with (ζ = 0, υ = 3 × 6 = 18, and M = 1) is created, see Fig. 7c and d. It includes a motor, a base q 1, four gears (q 2, q 3, q 4, q 5), four binary links (L 1, L 2, L 3 with jaw, L 4 with jaw), and a pin with the jaw. q 3 Here, q 2 and q 3 are connected with q 1 by R and R , respectively. The one ends of L 1 and L 2 are connected with q 1 by 2R, respectively. The other ends of L 1 and L 2 are connected with q 5 and q 4 by 2 R, respectively. The one ends of (L 3, L 4) are connected with (q 5, q 4) by 2R, respectively. The other ends of (L 3, L 4) are connected by 1R using the pin with jaw. Thus, there are N l = 14 for {one base q 1, four (q 2, q 3, q 4, q 5), five virtual links (l 1, l 2, l 3, l 4, l 5) for constructing three gear pairs, four links (L 1, L 2, L 3, L 4)}, N j =19 for 7R and 12R of three gear pairs, ∑f j = 19. M = 1 provides one DOF moving of the robotic gripper with three jaws III. M of planar mechanism of robotic gripper with three jaws is verified by K-G formula [Reference Huang9] as below,
M = 3(N l − N j − 1) + ∑f j = 3 × (14 − 19 − 1) + 19 = −18 + 19 = 1.
The grasping force or speed of the robotic gripper can be modified using different ratio of gear pairs to obtain mechanical advantages. The robotic gripper with three jaws can be used to grab the different object by varying the jaw positions of (L 3, L 4). Meanwhile, (q 2 = q 3, q 4 = q 5) are satisfied. When the gear q 3 rotates, a grasping motion of three jaws is generated.
Example 2. Similarly, using the same TG with 5q + 9b in Fig. 7b, a planar mechanism of the long-stroke unit for robotic pumping petroleum is created, see Fig. 8a and b.

Figure 8. A planar mechanism of long-stroke unit for robotic pumping petroleum (a), (b). I – motor, II – counterweight, III – pin with pumping rod, IV – belt, V – pumping rod, q 1 – base, (q 2, q 3, q 4, q 5) – gear.
Here, the other ends of (L 3, L 4) are connected by 1R using the pin with the pumping rod, and two counterweights are attached onto L 1 and L 2, respectively, for balancing actuating torque. The stroke L s or speed of the pumping rod can be modified using different ratio of gear pairs. Meanwhile, (q 2 = q 3, q 4 = q 5) are satisfied. When the gear q 3 rotates continually, a cycle reciprocating motion of pumping rod is generated.
Example 3. When a complex closed mechanism of the tunnel excavator with M = 6 and ζ=υ = 0 is synthesized using G 11/11 with 3q + 2h and 12e, see Fig. 8a, there are (n t = n p = 0, n q = 3, n h = 2).
Next, it is known from [Reference Lu, Ye and Zhang16] that c = 7 for G 11/11 with 3q + 2h. Thus, n b can be solved using a formula in [Reference Lu, Ye and Zhang16] as below, n b = 6 + M + 5c− υ+ ζ− (n t + n q + n p + n h) = M + 36 = 42.
After that, 42 binary links are distributed onto 12e of G 11/11, and a new TG with 2h + 3q + 42b is derived using G 11/11, see Fig. 9b. Here, the digit on each of e represents the number of b connected in series in this e. It is known from [Reference Johnson11] that one b can be replaced by ( P , R , P, R), (2, 3) b connected in series can be replaced by (U, S) respectively.

Figure 9. G 11/11 with 2h + 3q (a), TG with 2h + 3q + 42b (b), and robotic tunnel excavator (c), (d). I – tool, II – supporter, III – tunnel.
Thus, a complex closed mechanism of the excavator with (ζ= υ = 0, M = 6) is created, see Fig. 9c and d. It includes a base B with wheel, a moving platform m with tool, three supporters, six SPR-type active linear rods, three SPR-type linear rods, three UR-type linear rods. Thus, there are N l = 26 for (1m, 1B, three supporters, nine pistons, nine cylinders, three rods), N j =33 for (9S, 3U, 6 P , 3P, 12R), ∑f j = 9 × 3 + 3 × 2 + 9 + 12. M = 6 provides three DOF moving of the moving platform and three DOF moving of three supporters. M is verified by K-G formula [Reference Huang9, Reference Johnson11] as, M = 6(N l − N j − 1) + ∑f j − υ+ ζ = 6 × (26 − 33 − 1) + (12 + 9 + 6 + 9 × 3) = 6.
5. Conclusions
Let (b, t, q, p, h) be (binary, ternary, quaternary, pentagonal, hexagonal) link, respectively. A high-contracted topology graph G j/i excluding (b, t) is proposed for deriving the topology graphs TGs including (b, t, q, p, h, …) and the type synthesis of the complex closed robotic mechanisms with more mechanical advantages and useful functions.
Both the representation and the mathematic derivation of G j/i are different from that of TG. The representation and the mathematic derivation of various G j/i are more easily than that of TG. Many new TGs can be derived from different G j/i by adding (b, t). Many novel complex closed mechanisms can be synthesized using G j/i.
The isomorphism identification of G j/i is simpler than that of TG. Let TGx and TGy be two different TGs derived from two different G j/x and G j/y, respectively. If G j/x and G j/y are mutual isomerism, TGx and TGy must be mutual isomerism. If G j/x and G j/y are mutual isomorphism, TGx and TGy may be mutual isomorphism. The complicated isomorphism identification of TG can be transformed into a simple isomorphism identification of G j/i..
The relative rules are determined for deriving G j/i and reducing its isomorphism using the character strings and the digit groups. Many different digit groups from several character strings are derived for deriving G j/i (j = 0, …, 17). Many different G j/i (j = 0, …, 17) are constructed using a circle, several composite curves, and vertexes based on the character strings and the derived digit groups. A condition for identifying isomorphism G j/i is discovered and proved using the composite curves and their connections in G j/i, and some isomorphism G j/i are identified.
A new topology graph 1 is derived from derived G j/i (j= i = 7) with five quaternary links by adding nine binary links into G j/i (j= i = 7). A 1-DOF closed planar mechanism of the robotic gripper with three jaws and a 1-DOF long-stroke robotic pumping petroleum unit are synthesized from the topology graph 1. A new topology graph 2 is derived from derived G j/i (j= i = 11) with 3 quaternary link and 2 hexagonal link by adding 12 binary links into G j/i (j= i = 11). A 6-DOF robotic tunnel excavator with three supporters is synthesized from the topology graph 2.
Many G j/i which include six or more basic links and exclude binary link and ternary link will be studied further for creating more novel closed robotic mechanisms with more useful functions. Their derivations and identification isomorphism will be studied further.
Author contributions
Yang Lu conducts derivation and isomorphism identification of various high-contracted topology graph G j/i for deriving TG. Yi Lu proposes a novel high-contracted topology graph G j/i and gives creation examples of complex closed mechanisms using G j/i and wrote the article.
Financial support
The authors are grateful to Major Research Project (No. 91748125) supported by National Natural Science Foundation of China and Natural Science Foundation (grant number E2020203010) of Hebei, China.
Competing interests
The authors declare no Competing interests exist.
Ethical standards
Not applicable under the heading.
Appendix
The processes for constructing/representing G j/i (j = 12, …, 17) and their isomorphism identification are explained as follows:
Similarly, using the six rules in Section 2.2, the character strings and the digit groups for deriving G 12/i (i = 1, …, 72) with 2q + 2p+ h are given in Table A1.
Table A1. Character string and digit groups for deriving G 12/i (i = 1, …, 72) with 2q + 2p+ h.

After that, based on digit groups in Table A1, G 12/i (i = 1, …, 72) with 2q + 2p+ h are constructed, see Fig. A1. The results of isomorphism identification of G 12/i (i = 1, …, 72) are determined, see Table A2.

Figure A1. G 12/i (i = 1, …, 72).
Similarly, using the six rules in Section 2.2, the character strings and the digit groups for representing G 13/i (i = 1, …, 19) with 4p+ h are given in Table A3.
Table A2. Results of isomorphism identification for deriving G 12/i (i = 1, …, 72) (Y-isomorphism, N-isomerism).

Table A3. Character string and digit groups for deriving G 13/i (i = 1, …, 19).

After that, based on digit groups in Table A2, G 13/i (i = 1, …, 19) with 4p+ h are constructed, see Fig. A2. The several isomorphism of G 13/i (i = 1, …, 19) are determined, see Table A4.
Similarly, using the six rules in Section 2.2, the character strings and the digit groups for representing G 14/i (i = 1, …, 96) with q + 2p + 2h are given in Table A5. After that, based on digit groups in Table A5, G 14/i (i = 1, …, 96) with q + 2p + 2h are constructed, see Fig. A3. The several isomorphism of G 14/i (i = 1, …, 96) can be determined.
Similarly, using the six rules in Section 2.2, the character strings and the digit groups for representing G 15/i (i = 1, …, 58) with 2q + 3h are given in Table A6. After that, based on digit groups in Table A6, G 15/i (i = 1, …, 58) with 2q + 3h are constructed, see Fig. A4. The several isomorphism of G 15/i (i = 1, …, 58) with 2q + 3h can be determined.
Similarly, using the above six rules, the character strings and the digit groups for representing G 16/i (i = 1, …, 28) with q + 4h and G 17/i (i = 1, …, 30) with 5h are given in Table A7. After that, based on digit groups in Table A7, G 16/i (i = 1, …, 28) with q + 4h and G 17/i (i = 1, …, 30) with 5h are constructed, see Fig. A5. Their several isomorphism can be determined.

Figure A2. G 13/i (i = 1, …, 19) with 4p+ h.
Table A4. Results of isomorphism identification of G 13/i (i = 1, …, 19) (Y-isomorphism, N-isomerism).

Table A5. Character string and digit groups G 14/i (i = 1, …, 96) with q + 2p + 2h.


Figure A3. G 14/i (i = 1, …, 96) with q + 2p + 2h.
Table A6. Character string and digit groups G 15/i (i = 1, …, 58) with 2q + 3h.


Figure A4. G 15/i (i = 1, …, 58) with 2q + 3h.
Table A7. Character strings and digit groups of G 16/i (i = 1, …, 28) with q + 4h and G 17/i (i = 1, …, 30) with 5h.


Figure A5. G 16/i (i = 1, …, 28) with q + 4h and G 17/i (i = 1, …, 30) with 5h.































