




1. Introduction
Microswimmers are small-scale biological or artificial self-propelled entities that navigate through their environments in a regime dominated by viscous forces, making their motion governed by low Reynolds number hydrodynamics. Reciprocal motion cannot lead to net propulsion at low Reynolds numbers, due to the reversibility of governing equations as highlighted in Purcell’s scallop theorem (Purcell Reference Purcell1977). As a result, the movement of biological microswimmers at this scale, such as bacteria and spermatozoa, often relies on non-reciprocal dynamics of flagella or cilia (Lauga & Powers Reference Lauga and Powers2009; Lauga Reference Lauga2016). Artificial microswimmers, inspired by these biological systems, similarly exploit non-reciprocal dynamics via surface activity (Paxton et al. Reference Paxton, Kistler, Olmeda, Sen, Angelo, Cao, Mallouk, Lammert and Crespi2004; Cordova-Figueroa, Brady & Shklyaev Reference Cordova-Figueroa, Brady and Shklyaev2013), such as in self-phoretic swimmers (Golestanian, Liverpool & Ajdari Reference Golestanian, Liverpool and Ajdari2007; Yariv Reference Yariv2011; Lammert, Crespi & Nourhani Reference Lammert, Crespi and Nourhani2016; Nourhani & Lammert Reference Nourhani and Lammert2016; Nourhani Reference Nourhani2024).
The self-propulsion of a microswimmer is force-free and torque-free. Thus, the leading-order flow field generated by axisymmetric particle motion has the symmetry of a force dipole and is characterised by a second-rank symmetric stresslet tensor (Batchelor Reference Batchelor1970). The sign of the stresslet strength determines the swimmer type: positive values correspond to pullers (similar to the biflagellated algae Chlamydomonas reinhardtii), where the thrust is at the front and the resistive drag by the fluid is at the back. In contrast, negative values of the stresslet strength represent pushers with rear thrust (similar to E. coli and B. subtilis) (Wang & Ardekani Reference Wang and Ardekani2012; Saintillan & Shelley Reference Saintillan and Shelley2015; Spagnolie Reference Spagnolie2015). A zero value corresponds to neutral swimmers, such as Volvox, which neither push nor pull fluid in either direction (Drescher et al. Reference Drescher, Leptos, Tuval, Pedley and Goldstein2009; Pedley, Brumley & Goldstein Reference Pedley, Brumley and Goldstein2016). Understanding these classifications is crucial for predicting how different swimmers interact with their environments, including interactions with other swimmers, boundaries, or obstacles (Doostmohammadi, Stocker & Ardekani Reference Doostmohammadi, Stocker and Ardekani2012; Spagnolie Reference Spagnolie2015).
The energetic efficiency of microswimmers is a topic of ongoing research. The propulsion of microswimmers arises from the interplay between thrust generation and the hydrodynamics of the particle’s interaction with its viscous environment, which results in energy dissipation. For spherical swimmers, it is well-established that neutral swimmers exhibit minimal viscous dissipation and are considered energetically optimal (Michelin & Lauga Reference Michelin and Lauga2010). However, deviations from perfect spherical symmetry complicate this understanding, as more complex shapes can alter the centres of drag and thrust. Recent studies have demonstrated that non-spherical swimmers may exhibit more efficient propulsion as pushers or pullers (Guo et al. Reference Guo, Zhu, Liu, Bonnet and Veerapaneni2020). A minimum dissipation theorem for surface-driven active microswimmers sets a lower bound on the energy dissipation rate for rigid, surface-driven microswimmers in the regime of low Reynolds number hydrodynamics (Nasouri, Vilfan & Golestanian Reference Nasouri, Vilfan and Golestanian2021). Using this theorem, Daddi-Moussa-Ider et al. (Reference Daddi-Moussa-Ider, Nasouri, Vilfan and Golestanian2021) demonstrated that for axisymmetric slightly deformed spheres, only the sign of the third Legendre mode of the geometry determines the type of the optimum axisymmetric swimmer for a given geometry.
Our study builds on these foundations by exploring numerically how the shape of a microswimmer influences its optimal propulsion type using the spectral formalism for Stokes flow (Nabil et al. Reference Nabil, Nabavizadeh, Lammert and Nourhani2022). We show that deviations from sphericity beyond slight deformations involve additional Legendre modes of the geometry in determining the optimum swimmer type. The sign of the third Legendre mode of shape deformation plays a leading role in determining whether a swimmer type is a pusher, puller or neutral in most of the geometrical parameter space. However, the phase diagram reveals a domain where, for a given sign of the third-mode contribution, the optimal swimmer’s behaviour can vary. In this domain, the swimmer can be a puller, pusher or neutral depending on the extent of the deformation. Moreover, our analysis shows that the optimum swimmer type of axisymmetric particles with fore-and-aft symmetry is neutral. The proposed approach provides a theoretical framework for designing artificial microswimmers, allowing for the prediction and optimisation of swimmer behaviour in various fluid environments.
2. Optimal microswimmers
We study the motion of an axisymmetric particle with unit speed along the symmetry axis
 $\hat {\textbf {e}}$
in a fluid of viscosity
$\hat {\textbf {e}}$
in a fluid of viscosity
 $\mu$
under the prescribed surface boundary condition ‘BC’. The spherical coordinate system
$\mu$
under the prescribed surface boundary condition ‘BC’. The spherical coordinate system
 $(r, \theta , \phi )$
is used to describe the system. Under the no-slip boundary condition, ‘NS’, the velocity field over the particle surface
$(r, \theta , \phi )$
is used to describe the system. Under the no-slip boundary condition, ‘NS’, the velocity field over the particle surface
 ${\boldsymbol {r}}_{\!S}$
is
${\boldsymbol {r}}_{\!S}$
is
 \begin{equation} \boldsymbol {v}_{\textit{NS}}({\boldsymbol {r}}_{\!S}) = \hat {\textbf {e}}. \end{equation}
\begin{equation} \boldsymbol {v}_{\textit{NS}}({\boldsymbol {r}}_{\!S}) = \hat {\textbf {e}}. \end{equation}
The flow field due to the perfect-slip boundary condition, ‘PS’, satisfies
 \begin{align} \left \{\begin{array}{lll} {\rm Impermeability\,condition}: \, \, &\hat {\textbf {n}} \cdot \boldsymbol {v}_{\textit{PS}}({\boldsymbol {r}}_{\!S}) = \hat {\textbf {n}} \cdot \hat {\textbf {e}},\quad \qquad \qquad \qquad \qquad & \\ {\rm Zero\,tangential\,stress}: \,\, &\hat {\textbf {n}} \cdot \boldsymbol {\sigma }_{\textit{PS}}({\boldsymbol {r}}_{\!S}) \cdot \hat {\textbf {t}} \equiv 2 \mu \, \hat {\textbf {n}} \cdot \boldsymbol {E}_{\textit{PS}}({\boldsymbol {r}}_{\!S}) \cdot \hat {\textbf {t}}=0,& \end{array}\right . \end{align}
\begin{align} \left \{\begin{array}{lll} {\rm Impermeability\,condition}: \, \, &\hat {\textbf {n}} \cdot \boldsymbol {v}_{\textit{PS}}({\boldsymbol {r}}_{\!S}) = \hat {\textbf {n}} \cdot \hat {\textbf {e}},\quad \qquad \qquad \qquad \qquad & \\ {\rm Zero\,tangential\,stress}: \,\, &\hat {\textbf {n}} \cdot \boldsymbol {\sigma }_{\textit{PS}}({\boldsymbol {r}}_{\!S}) \cdot \hat {\textbf {t}} \equiv 2 \mu \, \hat {\textbf {n}} \cdot \boldsymbol {E}_{\textit{PS}}({\boldsymbol {r}}_{\!S}) \cdot \hat {\textbf {t}}=0,& \end{array}\right . \end{align}
where the stress tensor
 $ \boldsymbol {\sigma } = -{p} \boldsymbol {I} + 2\mu \boldsymbol {E}$
and the strain tensor
$ \boldsymbol {\sigma } = -{p} \boldsymbol {I} + 2\mu \boldsymbol {E}$
and the strain tensor
 $ \boldsymbol {E} = \frac{1}{2} [(\boldsymbol {\nabla }\boldsymbol {u}) + (\boldsymbol {\nabla }\boldsymbol {u})^{\rm T} ]$
are evaluated over the particle surface, I is the identity matrix, u is fluid velocity,
$ \boldsymbol {E} = \frac{1}{2} [(\boldsymbol {\nabla }\boldsymbol {u}) + (\boldsymbol {\nabla }\boldsymbol {u})^{\rm T} ]$
are evaluated over the particle surface, I is the identity matrix, u is fluid velocity,
 $\hat {\textbf {n}}$
and
$\hat {\textbf {n}}$
and
 $\hat {\textbf {t}} = \hat {\textbf {e}}_{\phi } \times \hat {\textbf {n}}$
are the normal and tangent unit vectors on the axisymmetric particle surface, and
$\hat {\textbf {t}} = \hat {\textbf {e}}_{\phi } \times \hat {\textbf {n}}$
are the normal and tangent unit vectors on the axisymmetric particle surface, and
 $p$
is the pressure field.
$p$
is the pressure field.
The minimum dissipation theorem (Nasouri et al. Reference Nasouri, Vilfan and Golestanian2021) shows that the velocity field
 $\boldsymbol {v}_{O{\kern-1pt}M}$
around an optimum microswimmer, ‘OM’, moving with unit velocity along its symmetry axis, can be expressed as a linear combination of the velocity fields due to the motion of a passive particle of the same geometry moving with the same velocity under no-slip
$\boldsymbol {v}_{O{\kern-1pt}M}$
around an optimum microswimmer, ‘OM’, moving with unit velocity along its symmetry axis, can be expressed as a linear combination of the velocity fields due to the motion of a passive particle of the same geometry moving with the same velocity under no-slip
 $\boldsymbol {v}_{\textit{NS}}$
and perfect-slip
$\boldsymbol {v}_{\textit{NS}}$
and perfect-slip
 $\boldsymbol {v}_{\textit{PS}}$
boundary conditions:
$\boldsymbol {v}_{\textit{PS}}$
boundary conditions:
 \begin{equation} \boldsymbol {v}_{\textit{OM}}({\boldsymbol {r}}) = \left (\frac {R_{\textit{NS}}}{R_{\textit{NS}} - R_{\textit{PS}}} \right ) \boldsymbol {v}_{\textit{PS}}({\boldsymbol {r}}) - \left (\frac {R_{\textit{PS}}}{R_{\textit{NS}} - R_{\textit{PS}}} \right ) \boldsymbol {v}_{\textit{NS}}({\boldsymbol {r}}), \end{equation}
\begin{equation} \boldsymbol {v}_{\textit{OM}}({\boldsymbol {r}}) = \left (\frac {R_{\textit{NS}}}{R_{\textit{NS}} - R_{\textit{PS}}} \right ) \boldsymbol {v}_{\textit{PS}}({\boldsymbol {r}}) - \left (\frac {R_{\textit{PS}}}{R_{\textit{NS}} - R_{\textit{PS}}} \right ) \boldsymbol {v}_{\textit{NS}}({\boldsymbol {r}}), \end{equation}
where the resistance coefficient
 $R_{\textit{BC}}$
is numerically equal to the force
$R_{\textit{BC}}$
is numerically equal to the force
 $F_{\textit{BC}} = \hat {\textbf {e}} \cdot {\boldsymbol F}_{\textit{BC}}$
exerted by the particle with boundary condition BC = NS, PS on the fluid along
$F_{\textit{BC}} = \hat {\textbf {e}} \cdot {\boldsymbol F}_{\textit{BC}}$
exerted by the particle with boundary condition BC = NS, PS on the fluid along
 $ \hat {\textbf {e}}$
.
$ \hat {\textbf {e}}$
.
The multipole expansion of the flow field around a particle
 $\boldsymbol {v}_{\textit{BC}} = \boldsymbol {v}_{\textit{BC}}^{{pf}} + \boldsymbol {v}_{\textit{BC}}^{{fd}} + \mathcal {O}(r^{-3})$
can be written in terms of increasing powers of
$\boldsymbol {v}_{\textit{BC}} = \boldsymbol {v}_{\textit{BC}}^{{pf}} + \boldsymbol {v}_{\textit{BC}}^{{fd}} + \mathcal {O}(r^{-3})$
can be written in terms of increasing powers of
 $r^{-1}$
, where the first two terms exhibit the symmetries of a point force and a force dipole, respectively. The axisymmetric flow with force-dipole symmetry is characterised by a trace-free, second-rank stresslet tensor (Batchelor Reference Batchelor1970)
$r^{-1}$
, where the first two terms exhibit the symmetries of a point force and a force dipole, respectively. The axisymmetric flow with force-dipole symmetry is characterised by a trace-free, second-rank stresslet tensor (Batchelor Reference Batchelor1970)
 \begin{equation} \boldsymbol {S}_{\textit{BC}} = S_{\textit{BC}} \left (\hat {\textbf {e}}\hat {\textbf {e}} - \frac {1}{3} \boldsymbol {I}\right ), \end{equation}
\begin{equation} \boldsymbol {S}_{\textit{BC}} = S_{\textit{BC}} \left (\hat {\textbf {e}}\hat {\textbf {e}} - \frac {1}{3} \boldsymbol {I}\right ), \end{equation}
where
 $S_{\textit{BC}}$
is the strength of the stresslet, and the resulting flow field
$S_{\textit{BC}}$
is the strength of the stresslet, and the resulting flow field
 $\boldsymbol {v}_{\textit{BC}}$
is
$\boldsymbol {v}_{\textit{BC}}$
is
 \begin{equation} \boldsymbol {v}_{\textit{BC}}(r,\theta )=\frac {-3}{8\pi \mu } \frac {1}{r^2} (\hat {\textbf {e}}_r \cdot \boldsymbol {S}_{\textit{BC}} \cdot \hat {\textbf {e}}_r) \hat {\textbf {e}}_r =\left (\frac {-S_{\textit{BC}}}{4\pi \mu }\right ) \frac {1}{r^2} \text {P}_2(\cos \theta )\, \hat {\textbf {e}}_r. \end{equation}
\begin{equation} \boldsymbol {v}_{\textit{BC}}(r,\theta )=\frac {-3}{8\pi \mu } \frac {1}{r^2} (\hat {\textbf {e}}_r \cdot \boldsymbol {S}_{\textit{BC}} \cdot \hat {\textbf {e}}_r) \hat {\textbf {e}}_r =\left (\frac {-S_{\textit{BC}}}{4\pi \mu }\right ) \frac {1}{r^2} \text {P}_2(\cos \theta )\, \hat {\textbf {e}}_r. \end{equation}
Here,
 $\hat {\textbf {e}}_r = {\boldsymbol {r}}/r$
and
$\hat {\textbf {e}}_r = {\boldsymbol {r}}/r$
and
 $\text {P}_\ell$
is the Legendre polynomial of degree
$\text {P}_\ell$
is the Legendre polynomial of degree
 $\ell$
. Using the equations for the velocity field around an optimum active particle (2.3), and the linearity of Stokes flow, we have the stresslet strength for the optimum microswimmer moving with unit velocity
$\ell$
. Using the equations for the velocity field around an optimum active particle (2.3), and the linearity of Stokes flow, we have the stresslet strength for the optimum microswimmer moving with unit velocity
 $\hat {\textbf {e}}$
along its symmetry axis:
$\hat {\textbf {e}}$
along its symmetry axis:
 \begin{align} S_{\textit{OM}} &= \frac { R_{\textit{NS}}S_{\textit{PS}} - R_{\textit{PS}}S_{\textit{NS}} } {R_{\textit{NS}} - R_{\textit{PS}}}. \end{align}
\begin{align} S_{\textit{OM}} &= \frac { R_{\textit{NS}}S_{\textit{PS}} - R_{\textit{PS}}S_{\textit{NS}} } {R_{\textit{NS}} - R_{\textit{PS}}}. \end{align}
Positive, negative and zero values of
 $S_{\textit{OM}}$
correspond to puller, pusher and neutral swimming type, respectively. (Daddi-Moussa-Ider et al. Reference Daddi-Moussa-Ider, Nasouri, Vilfan and Golestanian2021) studied the effect of geometry on the swimming mode of optimal swimmers represented by slightly deformed spheres with
$S_{\textit{OM}}$
correspond to puller, pusher and neutral swimming type, respectively. (Daddi-Moussa-Ider et al. Reference Daddi-Moussa-Ider, Nasouri, Vilfan and Golestanian2021) studied the effect of geometry on the swimming mode of optimal swimmers represented by slightly deformed spheres with
 \begin{equation} r_{\!S}(\theta ) = r_0 [1 + \delta \xi (\theta )], \quad \xi (\theta ) = \sum _{n=1}^\infty \gamma _n \text {P}_n(\cos \theta ), \end{equation}
\begin{equation} r_{\!S}(\theta ) = r_0 [1 + \delta \xi (\theta )], \quad \xi (\theta ) = \sum _{n=1}^\infty \gamma _n \text {P}_n(\cos \theta ), \end{equation}
where
 $\delta$
is the deformation amplitude and the deformation function
$\delta$
is the deformation amplitude and the deformation function
 $\xi$
can be expanded in terms of Legendre polynomials with expansion coefficients
$\xi$
can be expanded in terms of Legendre polynomials with expansion coefficients
 $\delta_{n}$
. They showed that for slight deformations to the linear order in the deformation amplitude, only mode
$\delta_{n}$
. They showed that for slight deformations to the linear order in the deformation amplitude, only mode
 $n = 3$
of the Legendre polynomials contributes to the stresslet given by (2.6),
$n = 3$
of the Legendre polynomials contributes to the stresslet given by (2.6),
 \begin{equation} S_{\textit{OM}} = \left [8\pi \! \left (\frac {27}{14}\right )\! \mu r_0^2 V_{\text {A}}\right ] \gamma _3\, \delta + \mathcal {O}(\delta ^2), \end{equation}
\begin{equation} S_{\textit{OM}} = \left [8\pi \! \left (\frac {27}{14}\right )\! \mu r_0^2 V_{\text {A}}\right ] \gamma _3\, \delta + \mathcal {O}(\delta ^2), \end{equation}
where
 $V_{\textrm{A}}$
is the swimmer speed. Thus, optimal swimmers with spherical or slightly deformed spherical geometries where
$V_{\textrm{A}}$
is the swimmer speed. Thus, optimal swimmers with spherical or slightly deformed spherical geometries where
 $\gamma _3 = 0$
are neutral, and the swimmer type of other slightly deformed spheres depends on the sign of
$\gamma _3 = 0$
are neutral, and the swimmer type of other slightly deformed spheres depends on the sign of
 $\gamma _3$
.
$\gamma _3$
.
In our study, we numerically evaluate the hydrodynamic resistance and stresslet beyond the linear term in
 $\delta$
using the spectral method (Nabil et al. Reference Nabil, Nabavizadeh, Lammert and Nourhani2022) and show that optimal microswimmers with fore-and-aft symmetry, corresponding to individual or combinations of even
$\delta$
using the spectral method (Nabil et al. Reference Nabil, Nabavizadeh, Lammert and Nourhani2022) and show that optimal microswimmers with fore-and-aft symmetry, corresponding to individual or combinations of even
 $n$
geometry modes, are neutral. For individual odd values,
$n$
geometry modes, are neutral. For individual odd values,
 $n = 3$
has the highest contribution, and the stresslet strength due to
$n = 3$
has the highest contribution, and the stresslet strength due to
 $n = 5$
and
$n = 5$
and
 $n = 7$
is one and two orders of magnitude smaller than that of
$n = 7$
is one and two orders of magnitude smaller than that of
 $n = 3$
, respectively. Their swimming modes are opposite to that of
$n = 3$
, respectively. Their swimming modes are opposite to that of
 $n = 3$
. We also evaluate a range of geometries with non-zero
$n = 3$
. We also evaluate a range of geometries with non-zero
 $\gamma _3$
and
$\gamma _3$
and
 $\gamma _5$
to study the phase diagram of their optimum swimmer types and neutral behaviour with non-zero
$\gamma _5$
to study the phase diagram of their optimum swimmer types and neutral behaviour with non-zero
 $\gamma _3$
.
$\gamma _3$
.
3. Calculating force and stresslet strength using the spectral method
The flow field around a particle moving at low Reynolds number in a fluid of viscosity
 $\mu$
satisfies the Stokes and continuity equations,
$\mu$
satisfies the Stokes and continuity equations,
 \begin{equation} \mu \nabla ^2 \boldsymbol {u} = \boldsymbol {\nabla } {p}, \quad \boldsymbol {\nabla } \cdot \boldsymbol {u} = 0, \end{equation}
\begin{equation} \mu \nabla ^2 \boldsymbol {u} = \boldsymbol {\nabla } {p}, \quad \boldsymbol {\nabla } \cdot \boldsymbol {u} = 0, \end{equation}
respectively. The pressure field is harmonic and satisfies
 $\nabla ^2 {p} = 0$
. Imposing homogeneity in the radial coordinate, we have Mode-1 biharmonic velocity fields (
$\nabla ^2 {p} = 0$
. Imposing homogeneity in the radial coordinate, we have Mode-1 biharmonic velocity fields (
 $\ell \geq 1$
) and Mode-2 harmonic velocity fields (
$\ell \geq 1$
) and Mode-2 harmonic velocity fields (
 $\ell \geq 0$
) (Nabil et al. Reference Nabil, Nabavizadeh, Lammert and Nourhani2022; Nabil & Nourhani Reference Nabil and Nourhani2024),
$\ell \geq 0$
) (Nabil et al. Reference Nabil, Nabavizadeh, Lammert and Nourhani2022; Nabil & Nourhani Reference Nabil and Nourhani2024),
 \begin{align} & \text {Mode-1}: \ \nabla ^2 \nabla ^2 \boldsymbol {u}_\ell ^{[1]} = 0 \quad \boldsymbol {u}_\ell ^{[1]}({\boldsymbol {r}}) = \left (\frac {r_0}{r}\right )^{\ell } \! \boldsymbol {u}_\ell ^{[1]}({\boldsymbol {r}}_0), \quad \quad \ {p}_\ell ^{[1]} \propto r^{-(\ell +1)} \text {P}_\ell (\cos \theta ) \nonumber \\ & \text {Mode-2}: \ \nabla ^2 \boldsymbol {u}_\ell ^{[2]} = 0 \quad \quad \boldsymbol {u}_\ell ^{[2]}({\boldsymbol {r}}) = \left (\frac {r_0}{r}\right )^{\ell +2} \! \boldsymbol {u}_\ell ^{[2]}({\boldsymbol {r}}_0), \ \ \quad {p}_\ell ^{[2]} = {\rm constant} \end{align}
\begin{align} & \text {Mode-1}: \ \nabla ^2 \nabla ^2 \boldsymbol {u}_\ell ^{[1]} = 0 \quad \boldsymbol {u}_\ell ^{[1]}({\boldsymbol {r}}) = \left (\frac {r_0}{r}\right )^{\ell } \! \boldsymbol {u}_\ell ^{[1]}({\boldsymbol {r}}_0), \quad \quad \ {p}_\ell ^{[1]} \propto r^{-(\ell +1)} \text {P}_\ell (\cos \theta ) \nonumber \\ & \text {Mode-2}: \ \nabla ^2 \boldsymbol {u}_\ell ^{[2]} = 0 \quad \quad \boldsymbol {u}_\ell ^{[2]}({\boldsymbol {r}}) = \left (\frac {r_0}{r}\right )^{\ell +2} \! \boldsymbol {u}_\ell ^{[2]}({\boldsymbol {r}}_0), \ \ \quad {p}_\ell ^{[2]} = {\rm constant} \end{align}
where
 $\boldsymbol {u}_\ell ^{[\beta ]}({\boldsymbol {r}}_0)$
are
$\boldsymbol {u}_\ell ^{[\beta ]}({\boldsymbol {r}}_0)$
are
 $\theta$
-dependent vectorial basis functions defined over a reference sphere
$\theta$
-dependent vectorial basis functions defined over a reference sphere
 $\mathbb {S}_0$
, co-centred with the particle. The radius
$\mathbb {S}_0$
, co-centred with the particle. The radius
 $r_0$
of
$r_0$
of
 $\mathbb {S}_0$
is arbitrary, and for a given particle geometry (2.7), the choice of
$\mathbb {S}_0$
is arbitrary, and for a given particle geometry (2.7), the choice of
 $r_0$
determines the deformation function
$r_0$
determines the deformation function
 $\xi$
. The explicit forms of these modes over the reference sphere are
$\xi$
. The explicit forms of these modes over the reference sphere are
 $\boldsymbol {u}_\ell ^{[1]}({\boldsymbol {r}}_0) = [ \ell (\ell +1)\textbf {P}^{[1]}_\ell - (\ell -2)\textbf {P}^{[2]}_\ell ]$
and
$\boldsymbol {u}_\ell ^{[1]}({\boldsymbol {r}}_0) = [ \ell (\ell +1)\textbf {P}^{[1]}_\ell - (\ell -2)\textbf {P}^{[2]}_\ell ]$
and
 $\boldsymbol {u}_\ell ^{[2]}({\boldsymbol {r}}_0) = [-(\ell +1)\textbf {P}^{[1]}_\ell + \textbf {P}^{[2]}_\ell ]$
where
$\boldsymbol {u}_\ell ^{[2]}({\boldsymbol {r}}_0) = [-(\ell +1)\textbf {P}^{[1]}_\ell + \textbf {P}^{[2]}_\ell ]$
where
 $\textbf {P}^{[1]}_\ell = \text {P}_\ell (\cos \theta ) \hat {\boldsymbol {e}}_{r}$
and
$\textbf {P}^{[1]}_\ell = \text {P}_\ell (\cos \theta ) \hat {\boldsymbol {e}}_{r}$
and
 $\textbf {P}^{[2]}_\ell = \partial _\theta \text {P}_\ell (\cos \theta ) \hat {\boldsymbol {e}}_{\theta }$
are vectorial basis functions.
$\textbf {P}^{[2]}_\ell = \partial _\theta \text {P}_\ell (\cos \theta ) \hat {\boldsymbol {e}}_{\theta }$
are vectorial basis functions.
We can expand the velocity field
 $\boldsymbol {u}({\boldsymbol {r}}_0)$
over
$\boldsymbol {u}({\boldsymbol {r}}_0)$
over
 $\mathbb {S}_0$
in terms of
$\mathbb {S}_0$
in terms of
 $\boldsymbol {u}_\ell ^{[\beta ]}({\boldsymbol {r}}_0)$
. To project onto individual modes, for two vectorial functions
$\boldsymbol {u}_\ell ^{[\beta ]}({\boldsymbol {r}}_0)$
. To project onto individual modes, for two vectorial functions
 $\boldsymbol {H}(\theta )$
and
$\boldsymbol {H}(\theta )$
and
 $\boldsymbol {G}(\theta )$
we define
$\boldsymbol {G}(\theta )$
we define
 \begin{equation} \langle \boldsymbol {H} | \boldsymbol {G} \rangle = \int _0^\pi \boldsymbol {H}(\theta ) \cdot \boldsymbol {G}(\theta )\, \sin \theta \, {\rm d}\theta \end{equation}
\begin{equation} \langle \boldsymbol {H} | \boldsymbol {G} \rangle = \int _0^\pi \boldsymbol {H}(\theta ) \cdot \boldsymbol {G}(\theta )\, \sin \theta \, {\rm d}\theta \end{equation}
as the inner product. Moreover, since the Stokes modes (3.2) are not orthogonal over the reference sphere,
 $\langle {\boldsymbol u}_{\ell }^{[1]}({\boldsymbol {r}}_0) | \boldsymbol {u}_{\ell }^{[2]} ({\boldsymbol {r}}_0)\rangle \neq 0$
, we define their corresponding dual vectors
$\langle {\boldsymbol u}_{\ell }^{[1]}({\boldsymbol {r}}_0) | \boldsymbol {u}_{\ell }^{[2]} ({\boldsymbol {r}}_0)\rangle \neq 0$
, we define their corresponding dual vectors
 \begin{align} &{\boldsymbol D}_\ell ^{[1]}(\cos \theta ) = \frac {2\ell +1}{4 \ell (\ell +1)}\left [ \ell \textbf {P}^{[1]}_\ell (\cos \theta ) + \textbf {P}^{[2]}_\ell (\cos \theta )\right ], \end{align}
\begin{align} &{\boldsymbol D}_\ell ^{[1]}(\cos \theta ) = \frac {2\ell +1}{4 \ell (\ell +1)}\left [ \ell \textbf {P}^{[1]}_\ell (\cos \theta ) + \textbf {P}^{[2]}_\ell (\cos \theta )\right ], \end{align}
 \begin{align} &{\boldsymbol D}_\ell ^{[2]}(\cos \theta ) = \frac {2\ell +1}{4(\ell +1)}\left [ (\ell -2)\textbf {P}^{[1]}_\ell (\cos \theta ) + \textbf {P}^{[2]}_\ell (\cos \theta )\right ] \\[6pt] \nonumber \end{align}
\begin{align} &{\boldsymbol D}_\ell ^{[2]}(\cos \theta ) = \frac {2\ell +1}{4(\ell +1)}\left [ (\ell -2)\textbf {P}^{[1]}_\ell (\cos \theta ) + \textbf {P}^{[2]}_\ell (\cos \theta )\right ] \\[6pt] \nonumber \end{align}
that satisfy
 $ \left \langle {\boldsymbol D}_{\ell _1}^{[\beta _1]} \middle | \boldsymbol {u}_{\ell _2}^{[\beta _2]} ({\boldsymbol {r}}_0)\right \rangle =\delta _{\ell _1\ell _2}\delta _{\beta _1\beta _2}$
where the Kronecker delta
$ \left \langle {\boldsymbol D}_{\ell _1}^{[\beta _1]} \middle | \boldsymbol {u}_{\ell _2}^{[\beta _2]} ({\boldsymbol {r}}_0)\right \rangle =\delta _{\ell _1\ell _2}\delta _{\beta _1\beta _2}$
where the Kronecker delta
 $\delta _{ij}$
equals 1 if
$\delta _{ij}$
equals 1 if
 $i = j$
and 0 otherwise.
$i = j$
and 0 otherwise.
Knowing the velocity field
 $\boldsymbol {u}({\boldsymbol {r}}_0)$
over the surface of the reference sphere
$\boldsymbol {u}({\boldsymbol {r}}_0)$
over the surface of the reference sphere
 $\mathbb {S}_0$
, we can write the velocity field in its spectral expansion
$\mathbb {S}_0$
, we can write the velocity field in its spectral expansion
 \begin{equation} \boldsymbol {u}({\boldsymbol {r}}) = \sum _{\beta ,\ell } \left \langle \boldsymbol {D}_\ell ^{[\beta ]} \middle | \boldsymbol {u}({\boldsymbol {r}}_0) \right \rangle \boldsymbol {u}_\ell ^{[\beta ]} ({\boldsymbol {r}}). \end{equation}
\begin{equation} \boldsymbol {u}({\boldsymbol {r}}) = \sum _{\beta ,\ell } \left \langle \boldsymbol {D}_\ell ^{[\beta ]} \middle | \boldsymbol {u}({\boldsymbol {r}}_0) \right \rangle \boldsymbol {u}_\ell ^{[\beta ]} ({\boldsymbol {r}}). \end{equation}
Due to the linearity of Stokes flow and the properties of a Newtonian fluid, a similar spectral expansion with the same expansion coefficients can be written for pressure, strain tensor and stress tensor. An axisymmetric particle moving with unit velocity
 $\hat {\textbf {e}}$
under boundary condition BC exerts a force on the fluid, given by
$\hat {\textbf {e}}$
under boundary condition BC exerts a force on the fluid, given by
 \begin{equation} F_{\textit{BC}} = 8\, \pi \mu r_0 \left \langle \boldsymbol {D}_1^{[1]} \middle | \boldsymbol {v}_{\textit{BC}}({\boldsymbol {r}}_0) \right \rangle \stackrel {N}{=} R_{\textit{BC}}, \end{equation}
\begin{equation} F_{\textit{BC}} = 8\, \pi \mu r_0 \left \langle \boldsymbol {D}_1^{[1]} \middle | \boldsymbol {v}_{\textit{BC}}({\boldsymbol {r}}_0) \right \rangle \stackrel {N}{=} R_{\textit{BC}}, \end{equation}
where ‘
 $N$
’ atop the equals sign serves as a reminder that the resistance coefficient
$N$
’ atop the equals sign serves as a reminder that the resistance coefficient
 $R_{\textit{BC}}$
is numerically equal to the magnitude of the force exerted on the fluid by a particle moving with unit velocity. We will use expression (3.7) in (2.6) for no-slip and perfect-slip boundary conditions. Since the velocity field due to the stresslet, according to (2.5), scales as
$R_{\textit{BC}}$
is numerically equal to the magnitude of the force exerted on the fluid by a particle moving with unit velocity. We will use expression (3.7) in (2.6) for no-slip and perfect-slip boundary conditions. Since the velocity field due to the stresslet, according to (2.5), scales as
 $r^{-2}$
, and the particle is rigid with no fluid source, for
$r^{-2}$
, and the particle is rigid with no fluid source, for
 $\ell \geq 1$
, the only Stokes mode that gives a
$\ell \geq 1$
, the only Stokes mode that gives a
 ${\sim}r^{-2}$
dependence is Mode-1 with
${\sim}r^{-2}$
dependence is Mode-1 with
 $\ell = 2$
. Therefore, the velocity field contribution with the symmetry of a force dipole for a particle moving with unit velocity
$\ell = 2$
. Therefore, the velocity field contribution with the symmetry of a force dipole for a particle moving with unit velocity
 $\hat {\textbf {e}}$
under boundary condition BC is
$\hat {\textbf {e}}$
under boundary condition BC is
 \begin{equation} \left \langle \boldsymbol {D}_2^{[1]} \middle | \boldsymbol {v}_{\textit{BC}}({\boldsymbol {r}}_0) \right \rangle \boldsymbol {u}_2^{[1]}({\boldsymbol {r}}) = 6 r_0^2 \left \langle \boldsymbol {D}_2^{[1]} \middle | \boldsymbol {v}_{\textit{BC}}({\boldsymbol {r}}_0) \right \rangle \,\frac {1}{r^2} \text {P}_2(\cos \theta )\, \hat {\boldsymbol {e}}_{r}. \end{equation}
\begin{equation} \left \langle \boldsymbol {D}_2^{[1]} \middle | \boldsymbol {v}_{\textit{BC}}({\boldsymbol {r}}_0) \right \rangle \boldsymbol {u}_2^{[1]}({\boldsymbol {r}}) = 6 r_0^2 \left \langle \boldsymbol {D}_2^{[1]} \middle | \boldsymbol {v}_{\textit{BC}}({\boldsymbol {r}}_0) \right \rangle \,\frac {1}{r^2} \text {P}_2(\cos \theta )\, \hat {\boldsymbol {e}}_{r}. \end{equation}
Comparing this expression with the flow field (2.5) gives the stresslet strength:
 \begin{equation} S_{\textit{BC}} = -24\, \pi \mu r_0^2 \left \langle \boldsymbol {D}_2^{[1]} \middle | \boldsymbol {v}_{\textit{BC}}({\boldsymbol {r}}_0) \right \rangle . \end{equation}
\begin{equation} S_{\textit{BC}} = -24\, \pi \mu r_0^2 \left \langle \boldsymbol {D}_2^{[1]} \middle | \boldsymbol {v}_{\textit{BC}}({\boldsymbol {r}}_0) \right \rangle . \end{equation}
After using the expression for the force exerted on the fluid (3.7) and the stresslet strength (3.9), we can rewrite the stresslet strength (2.6) for the optimum microswimmer moving with unit velocity
 $\hat {\textbf {e}}$
along its symmetry axis:
$\hat {\textbf {e}}$
along its symmetry axis:
 \begin{align} S_{\textit{OM}} &= -24\, \pi \mu r_0^2 \left [ \frac { \left \langle \boldsymbol {D}_1^{[1]} \middle | \boldsymbol {v}_{\textit{NS}}({\boldsymbol {r}}_0) \right \rangle \left \langle \boldsymbol {D}_2^{[1]} \middle | \boldsymbol {v}_{\textit{PS}}({\boldsymbol {r}}_0) \right \rangle - \left \langle \boldsymbol {D}_1^{[1]} \middle | \boldsymbol {v}_{\textit{PS}}({\boldsymbol {r}}_0) \right \rangle \left \langle \boldsymbol {D}_2^{[1]} \middle | \boldsymbol {v}_{\textit{NS}}({\boldsymbol {r}}_0) \right \rangle }{ \left \langle \boldsymbol {D}_1^{[1]} \middle | \boldsymbol {v}_{\textit{NS}}({\boldsymbol {r}}_0) \right \rangle - \left \langle \boldsymbol {D}_1^{[1]} \middle | \boldsymbol {v}_{\textit{PS}}({\boldsymbol {r}}_0) \right \rangle } \right ], \end{align}
\begin{align} S_{\textit{OM}} &= -24\, \pi \mu r_0^2 \left [ \frac { \left \langle \boldsymbol {D}_1^{[1]} \middle | \boldsymbol {v}_{\textit{NS}}({\boldsymbol {r}}_0) \right \rangle \left \langle \boldsymbol {D}_2^{[1]} \middle | \boldsymbol {v}_{\textit{PS}}({\boldsymbol {r}}_0) \right \rangle - \left \langle \boldsymbol {D}_1^{[1]} \middle | \boldsymbol {v}_{\textit{PS}}({\boldsymbol {r}}_0) \right \rangle \left \langle \boldsymbol {D}_2^{[1]} \middle | \boldsymbol {v}_{\textit{NS}}({\boldsymbol {r}}_0) \right \rangle }{ \left \langle \boldsymbol {D}_1^{[1]} \middle | \boldsymbol {v}_{\textit{NS}}({\boldsymbol {r}}_0) \right \rangle - \left \langle \boldsymbol {D}_1^{[1]} \middle | \boldsymbol {v}_{\textit{PS}}({\boldsymbol {r}}_0) \right \rangle } \right ], \end{align}
which can be calculated using the
 $\ell =1, 2$
coefficients of Mode-1 terms in the spectral expansion (3.6) for flow fields with no-slip (2.1) and perfect-slip (2.2) boundary conditions, as elaborated below.
$\ell =1, 2$
coefficients of Mode-1 terms in the spectral expansion (3.6) for flow fields with no-slip (2.1) and perfect-slip (2.2) boundary conditions, as elaborated below.
To calculate the unknown expansion coefficients
 $\langle \boldsymbol {D}_{\ell }^{[\beta ]} | \boldsymbol {v}_{\textit{NS}}({\boldsymbol {r}}_0) \rangle$
for an axisymmetric particle with surface
$\langle \boldsymbol {D}_{\ell }^{[\beta ]} | \boldsymbol {v}_{\textit{NS}}({\boldsymbol {r}}_0) \rangle$
for an axisymmetric particle with surface
 $\mathbb {S}$
, which for a non-spherical particle is different from
$\mathbb {S}$
, which for a non-spherical particle is different from
 $\mathbb {S}_0$
, we apply the no-slip boundary condition (2.1) over
$\mathbb {S}_0$
, we apply the no-slip boundary condition (2.1) over
 $\mathbb {S}$
to the spectral expansion (3.6) and take the inner product with the dual vectors, yielding
$\mathbb {S}$
to the spectral expansion (3.6) and take the inner product with the dual vectors, yielding
 \begin{equation} \left \langle \boldsymbol {D}_{\ell _1}^{[\beta _1]} \middle | \boldsymbol {v}_{\textit{NS}}({\boldsymbol {r}}_{\!S}) \right \rangle = \sum _{\beta _2,\ell _2} \left \langle \boldsymbol {D}_{\ell _1}^{[\beta _1]} \middle | \boldsymbol {u}_{\ell _2}^{[\beta _2]} ({\boldsymbol {r}}_{\!S}) \right \rangle \left \langle \boldsymbol {D}_{\ell _2}^{[\beta _2]} \middle | \boldsymbol {v}_{\textit{NS}}({\boldsymbol {r}}_0) \right \rangle . \end{equation}
\begin{equation} \left \langle \boldsymbol {D}_{\ell _1}^{[\beta _1]} \middle | \boldsymbol {v}_{\textit{NS}}({\boldsymbol {r}}_{\!S}) \right \rangle = \sum _{\beta _2,\ell _2} \left \langle \boldsymbol {D}_{\ell _1}^{[\beta _1]} \middle | \boldsymbol {u}_{\ell _2}^{[\beta _2]} ({\boldsymbol {r}}_{\!S}) \right \rangle \left \langle \boldsymbol {D}_{\ell _2}^{[\beta _2]} \middle | \boldsymbol {v}_{\textit{NS}}({\boldsymbol {r}}_0) \right \rangle . \end{equation}
Here, except for the expansion coefficients, the rest of the terms are known.
For the perfect-slip scenario, both sides of (2.2) are scalar functions of
 $\theta$
. We define the inner product
$\theta$
. We define the inner product
 $\langle h | g \rangle = \int _0^\pi h(\theta ) \, g(\theta )\, \sin \theta \, d\theta$
for two scalar functions, which is distinct from the inner product of two vectorial functions (3.3), although the same notion applies. Thus, using inner products with Legendre polynomials, we can turn the perfect-slip boundary condition (2.2) into a set of linear equations with expansion coefficients as unknowns:
$\langle h | g \rangle = \int _0^\pi h(\theta ) \, g(\theta )\, \sin \theta \, d\theta$
for two scalar functions, which is distinct from the inner product of two vectorial functions (3.3), although the same notion applies. Thus, using inner products with Legendre polynomials, we can turn the perfect-slip boundary condition (2.2) into a set of linear equations with expansion coefficients as unknowns:
 \begin{align} {\left \langle \text {P}_{\ell _1} \middle | \hat {\textbf {n}} \cdot \boldsymbol {v}_{\textit{PS}}({\boldsymbol {r}}_{\!S}) \right \rangle } &= \sum _{\beta _2,\ell _2} {\left \langle \text {P}_{\ell _1} \middle | \hat {\textbf {n}} \cdot \boldsymbol {u}_{\ell _2}^{[\beta _2]} ({\boldsymbol {r}}_{\!S}) \right \rangle } {\left \langle \boldsymbol {D}_{\ell _2}^{[\beta _2]} \middle | \boldsymbol {v}_{\textit{PS}}({\boldsymbol {r}}_0) \right \rangle }, \end{align}
\begin{align} {\left \langle \text {P}_{\ell _1} \middle | \hat {\textbf {n}} \cdot \boldsymbol {v}_{\textit{PS}}({\boldsymbol {r}}_{\!S}) \right \rangle } &= \sum _{\beta _2,\ell _2} {\left \langle \text {P}_{\ell _1} \middle | \hat {\textbf {n}} \cdot \boldsymbol {u}_{\ell _2}^{[\beta _2]} ({\boldsymbol {r}}_{\!S}) \right \rangle } {\left \langle \boldsymbol {D}_{\ell _2}^{[\beta _2]} \middle | \boldsymbol {v}_{\textit{PS}}({\boldsymbol {r}}_0) \right \rangle }, \end{align}
 \begin{align} 0 &= \sum _{\beta _2,\ell _2} {\left \langle \text {P}_{\ell _1} \middle | \hat {\textbf {n}} \cdot \boldsymbol {E}_{\ell _2}^{[\beta _2]}({\boldsymbol {r}}_{\!S}) \cdot \hat {\textbf {t}} \right \rangle } {\left \langle \boldsymbol {D}_{\ell _2}^{[\beta _2]} \middle | \boldsymbol {v}_{\textit{PS}}({\boldsymbol {r}}_0) \right \rangle }, \\[6pt] \nonumber \end{align}
\begin{align} 0 &= \sum _{\beta _2,\ell _2} {\left \langle \text {P}_{\ell _1} \middle | \hat {\textbf {n}} \cdot \boldsymbol {E}_{\ell _2}^{[\beta _2]}({\boldsymbol {r}}_{\!S}) \cdot \hat {\textbf {t}} \right \rangle } {\left \langle \boldsymbol {D}_{\ell _2}^{[\beta _2]} \middle | \boldsymbol {v}_{\textit{PS}}({\boldsymbol {r}}_0) \right \rangle }, \\[6pt] \nonumber \end{align}
where the strain tensor for Stokes modes is
 $ \boldsymbol {E}_\ell ^{[\beta ]} = \frac {1}{2} [(\boldsymbol {\nabla }\boldsymbol {u}_\ell ^{[\beta ]}) + (\boldsymbol {\nabla }\boldsymbol {u}_\ell ^{[\beta ]})^T ]$
.
$ \boldsymbol {E}_\ell ^{[\beta ]} = \frac {1}{2} [(\boldsymbol {\nabla }\boldsymbol {u}_\ell ^{[\beta ]}) + (\boldsymbol {\nabla }\boldsymbol {u}_\ell ^{[\beta ]})^T ]$
.
In the next section, by obtaining the expansion coefficients
 $\langle \boldsymbol {D}_\ell ^{[\beta ]} | \boldsymbol {v}_{\textit{BC}}({\boldsymbol {r}}_0) \rangle$
from Eqns. (3.11) and (3.12a,b) for no-slip and perfect-slip boundary conditions, respectively, we will calculate the stresslet strength (3.10) for optimum microswimmers for a set of geometries and discuss their swimming type.
$\langle \boldsymbol {D}_\ell ^{[\beta ]} | \boldsymbol {v}_{\textit{BC}}({\boldsymbol {r}}_0) \rangle$
from Eqns. (3.11) and (3.12a,b) for no-slip and perfect-slip boundary conditions, respectively, we will calculate the stresslet strength (3.10) for optimum microswimmers for a set of geometries and discuss their swimming type.
4. Results and discussion
Reversing a particle’s orientation by flipping it across a plane perpendicular to its symmetry axis, while keeping the direction of motion intact, changes the sign of the stresslet strength. For particles with fore-and-aft symmetry, however, this flip leaves the configuration unchanged, resulting in zero stresslet strength. Therefore, the optimum swimmer type for a particle with fore-and-aft symmetry is neutral. Consequently, the stresslet strength for any optimum swimmer with a geometry consisting of individual even geometrical modes
 $\gamma _{2k}$
with
$\gamma _{2k}$
with
 $k \in \mathbb {N}$
, or linear combinations of these even modes, is zero.
$k \in \mathbb {N}$
, or linear combinations of these even modes, is zero.

Figure 1. The force and stresslet strength for particles with individual geometry modes
 $n = 3, 5, 7$
under (a,b) no-slip boundary conditions and (c,d) perfect-slip boundary conditions. (e) The stresslet for the optimum swimmer. In all calculations
$n = 3, 5, 7$
under (a,b) no-slip boundary conditions and (c,d) perfect-slip boundary conditions. (e) The stresslet for the optimum swimmer. In all calculations
 $r_0 =1$
.
$r_0 =1$
.
In our study, the particles are deformations of the unit sphere,
 $\boldsymbol{r}_0 = 1$
. For individual odd geometrical modes
$\boldsymbol{r}_0 = 1$
. For individual odd geometrical modes
 $n = 3, 5$
and 7, for which
$n = 3, 5$
and 7, for which
 $\xi (\theta ) = \text {P}_n(\cos \theta )$
, we evaluated the force and stresslet strength for particles under no-slip (figure 1
a,b) and perfect-slip (figure 1
c,d) boundary conditions, and calculated the stresslet for the optimum swimmer (figure 1
e) using (3.10) for a range of deformation amplitudes
$\xi (\theta ) = \text {P}_n(\cos \theta )$
, we evaluated the force and stresslet strength for particles under no-slip (figure 1
a,b) and perfect-slip (figure 1
c,d) boundary conditions, and calculated the stresslet for the optimum swimmer (figure 1
e) using (3.10) for a range of deformation amplitudes
 $\delta \in [-0.2, 0.2]$
. For
$\delta \in [-0.2, 0.2]$
. For
 $n = 3$
(
$n = 3$
(
 $\gamma _n =\delta _{n3}$
in (2.7)), the numerical values of the stresslet strength corroborate the linear theoretical values:
$\gamma _n =\delta _{n3}$
in (2.7)), the numerical values of the stresslet strength corroborate the linear theoretical values:
 $S_{\textit{NS}} = 8 \pi (9/28) \mu r_0^2 \,\delta$
for no-slip,
$S_{\textit{NS}} = 8 \pi (9/28) \mu r_0^2 \,\delta$
for no-slip,
 $S_{{\kern-0.5pt}P{\kern-1pt}S} = 8 \pi (6/7) \mu r_0^2 \,\delta$
for perfect-slip and
$S_{{\kern-0.5pt}P{\kern-1pt}S} = 8 \pi (6/7) \mu r_0^2 \,\delta$
for perfect-slip and
 $S_{O{\kern-1pt}M} = 8 \pi (27/14) \mu r_0^2 \,\delta$
for optimum swimmers (Daddi-Moussa-Ider et al. Reference Daddi-Moussa-Ider, Nasouri, Vilfan and Golestanian2021) in the range
$S_{O{\kern-1pt}M} = 8 \pi (27/14) \mu r_0^2 \,\delta$
for optimum swimmers (Daddi-Moussa-Ider et al. Reference Daddi-Moussa-Ider, Nasouri, Vilfan and Golestanian2021) in the range
 $|\delta | \lesssim 0.1$
, with slight deviations in the range
$|\delta | \lesssim 0.1$
, with slight deviations in the range
 $0.1 \lesssim |\delta | \leq 0.2$
.
$0.1 \lesssim |\delta | \leq 0.2$
.
For optimum swimmers with
 $n = 3$
geometry mode (
$n = 3$
geometry mode (
 $\gamma _3 = 1, \gamma _{m \neq 3} = 0$
), positive values of the deformation amplitude
$\gamma _3 = 1, \gamma _{m \neq 3} = 0$
), positive values of the deformation amplitude
 $\delta$
correspond to pullers, while negative values correspond to pushers. For
$\delta$
correspond to pullers, while negative values correspond to pushers. For
 $n = 5$
and
$n = 5$
and
 $7$
, the sign of the stresslet is opposite to that of
$7$
, the sign of the stresslet is opposite to that of
 $n = 3$
. Therefore, the swimmer-type behaviour is reversed: the optimum swimmer type for positive (negative) values of
$n = 3$
. Therefore, the swimmer-type behaviour is reversed: the optimum swimmer type for positive (negative) values of
 $\delta$
corresponds to pushers (pullers). Moreover, the stresslet for
$\delta$
corresponds to pushers (pullers). Moreover, the stresslet for
 $n = 5$
is one order of magnitude smaller and for
$n = 5$
is one order of magnitude smaller and for
 $n = 7$
two orders of magnitude smaller than that of
$n = 7$
two orders of magnitude smaller than that of
 $n = 3$
, making
$n = 3$
, making
 $n = 3$
the dominant geometrical mode. As shown in figure 1(e), the slope of the stresslet strength for
$n = 3$
the dominant geometrical mode. As shown in figure 1(e), the slope of the stresslet strength for
 $n = 5$
and
$n = 5$
and
 $7$
is effectively zero at
$7$
is effectively zero at
 $\delta = 0$
. Thus, in the linear regime of very small
$\delta = 0$
. Thus, in the linear regime of very small
 $\delta$
, these modes do not contribute to determining the swimmer type and only the contribution from
$\delta$
, these modes do not contribute to determining the swimmer type and only the contribution from
 $n = 3$
appears, while the rest of the geometry modes (
$n = 3$
appears, while the rest of the geometry modes (
 $n \neq 3$
) are neutral. However, as the figure shows, in the nonlinear regime, other odd
$n \neq 3$
) are neutral. However, as the figure shows, in the nonlinear regime, other odd
 $n$
geometry modes are not neutral.
$n$
geometry modes are not neutral.

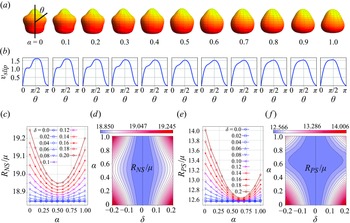
Figure 2. (a) Particle geometries corresponding to the deformation function
 $\xi _{35}(\theta ; \alpha ) = \alpha \text {P}_3 + (1-\alpha ) \text {P}_5$
for
$\xi _{35}(\theta ; \alpha ) = \alpha \text {P}_3 + (1-\alpha ) \text {P}_5$
for
 $\alpha \in [0,1]$
and
$\alpha \in [0,1]$
and
 $\delta =0.2$
. (b) Slip velocity
$\delta =0.2$
. (b) Slip velocity
 $ v_{slip} $
for optimum swimmers of these geometries as a function of
$ v_{slip} $
for optimum swimmers of these geometries as a function of
 $\theta$
, following
$\theta$
, following
 $\boldsymbol {v}_{\textit{OM}}(\boldsymbol {r}_{\!S}) = v_{{slip}}(\theta ) \, \hat {\textbf {t}} + \hat {\textbf {e}}$
. Resistance coefficients for (c,d) no-slip and (e,f) perfect-slip boundary conditions as functions of
$\boldsymbol {v}_{\textit{OM}}(\boldsymbol {r}_{\!S}) = v_{{slip}}(\theta ) \, \hat {\textbf {t}} + \hat {\textbf {e}}$
. Resistance coefficients for (c,d) no-slip and (e,f) perfect-slip boundary conditions as functions of
 $\alpha$
and
$\alpha$
and
 $\delta$
.
$\delta$
.

Figure 3. (a–c) Stresslet strength corresponding to the deformation function
 $\xi _{35}(\theta ; \alpha ) = \alpha \text {P}_3 + (1-\alpha ) \text {P}_5$
for
$\xi _{35}(\theta ; \alpha ) = \alpha \text {P}_3 + (1-\alpha ) \text {P}_5$
for
 $\alpha \in [0,1]$
and
$\alpha \in [0,1]$
and
 $\delta \in [-0.2, 0.2]$
for no-slip, perfect-slip and optimum swimmer boundary conditions, respectively. (d–f) Scaled stresslet strength based on the contribution of the third Legendre mode
$\delta \in [-0.2, 0.2]$
for no-slip, perfect-slip and optimum swimmer boundary conditions, respectively. (d–f) Scaled stresslet strength based on the contribution of the third Legendre mode
 $\alpha \equiv \gamma _3$
. (g–i) Contour plots of the stresslet strength. (j–l) Phase diagram showing the sign of the stresslet strength.
$\alpha \equiv \gamma _3$
. (g–i) Contour plots of the stresslet strength. (j–l) Phase diagram showing the sign of the stresslet strength.
Next, we examine the deformation function
 $\xi _{35}(\theta ; \alpha )$
defined by
$\xi _{35}(\theta ; \alpha )$
defined by
 \begin{equation} \xi _{nm}(\theta ; \alpha ) = \alpha \text {P}_n(\cos \theta ) + (1 - \alpha ) \text {P}_m(\cos \theta ), \quad \alpha \in [0,1], \end{equation}
\begin{equation} \xi _{nm}(\theta ; \alpha ) = \alpha \text {P}_n(\cos \theta ) + (1 - \alpha ) \text {P}_m(\cos \theta ), \quad \alpha \in [0,1], \end{equation}
such that
 $\xi _{35}(\theta ; 0) = \text {P}_5(\cos \theta )$
and
$\xi _{35}(\theta ; 0) = \text {P}_5(\cos \theta )$
and
 $\xi _{35}(\theta ; 1) = \text {P}_3(\cos \theta )$
as shown in figure 2(a) for
$\xi _{35}(\theta ; 1) = \text {P}_3(\cos \theta )$
as shown in figure 2(a) for
 $\delta = 0.2$
. This particular shape function (
$\delta = 0.2$
. This particular shape function (
 $\gamma _3 = \alpha$
and
$\gamma _3 = \alpha$
and
 $\gamma _5 = 1-\alpha$
) allows us to explore the interplay between the geometrical modes
$\gamma _5 = 1-\alpha$
) allows us to explore the interplay between the geometrical modes
 $n = 3$
and
$n = 3$
and
 $n = 5$
in determining the optimum swimmer type of the active particle. In the domain of
$n = 5$
in determining the optimum swimmer type of the active particle. In the domain of
 $\delta \gt 0$
,
$\delta \gt 0$
,
 $n = 3$
acts as a puller and
$n = 3$
acts as a puller and
 $n = 5$
as a pusher, and the behaviour is reversed for opposite signs of
$n = 5$
as a pusher, and the behaviour is reversed for opposite signs of
 $\delta \lt 0$
, making the function
$\delta \lt 0$
, making the function
 $\xi _{35}(\theta ; \alpha )$
useful for studying transitions between pusher and puller types; varying the parameter
$\xi _{35}(\theta ; \alpha )$
useful for studying transitions between pusher and puller types; varying the parameter
 $\alpha$
enables a continuous shift between swimmer types, depending on which geometry mode dominates for a given value of
$\alpha$
enables a continuous shift between swimmer types, depending on which geometry mode dominates for a given value of
 $\alpha$
and
$\alpha$
and
 $\delta$
.
$\delta$
.
As shown in figure 2, the variation in the resistance coefficient with respect to
 $\alpha$
is not linear, indicating a nonlinear interaction between the geometry modes that goes beyond a simple linear weighted average. This nonlinearity suggests that the transition between pusher- and puller-type behaviour involves intricate changes in the fluid dynamics around the particle, influenced by both the relative contributions of the geometrical modes and the deformation amplitude
$\alpha$
is not linear, indicating a nonlinear interaction between the geometry modes that goes beyond a simple linear weighted average. This nonlinearity suggests that the transition between pusher- and puller-type behaviour involves intricate changes in the fluid dynamics around the particle, influenced by both the relative contributions of the geometrical modes and the deformation amplitude
 $\delta$
. In figure 3(a–c), we present the calculations for the stresslet across various values of
$\delta$
. In figure 3(a–c), we present the calculations for the stresslet across various values of
 $\alpha$
in the range
$\alpha$
in the range
 $\delta \in [-0.2, 0.2]$
. Except for the case of
$\delta \in [-0.2, 0.2]$
. Except for the case of
 $\alpha = 0$
, which corresponds to the
$\alpha = 0$
, which corresponds to the
 $n = 5$
mode, the stresslet exhibits a monotonic increase with increasing
$n = 5$
mode, the stresslet exhibits a monotonic increase with increasing
 $\delta$
for the rest of the
$\delta$
for the rest of the
 $\alpha$
values presented in the figure.
$\alpha$
values presented in the figure.
Since
 $\alpha \equiv \gamma _3$
in (2.7), to evaluate the contribution of the geometrical mode
$\alpha \equiv \gamma _3$
in (2.7), to evaluate the contribution of the geometrical mode
 $n=3$
, we plotted
$n=3$
, we plotted
 $S_{\textit{BC}}/\alpha$
for
$S_{\textit{BC}}/\alpha$
for
 $\alpha \neq 0$
to examine the relationship between the stresslet and deformation amplitude
$\alpha \neq 0$
to examine the relationship between the stresslet and deformation amplitude
 $\delta$
in figure 3(d–f). As expected, we observe a linear relationship with
$\delta$
in figure 3(d–f). As expected, we observe a linear relationship with
 $\delta$
for small values of
$\delta$
for small values of
 $|\delta | \lesssim 0.05$
, and beyond this domain, deviations from linearity begin to emerge, indicating the influence of
$|\delta | \lesssim 0.05$
, and beyond this domain, deviations from linearity begin to emerge, indicating the influence of
 $n = 5$
on the stresslet. By analysing
$n = 5$
on the stresslet. By analysing
 $S_{\textit{OM}}/\alpha$
, we can further understand the impact of this secondary geometrical mode on the particle’s swimming dynamics.
$S_{\textit{OM}}/\alpha$
, we can further understand the impact of this secondary geometrical mode on the particle’s swimming dynamics.
Furthermore, we created a phase diagram in the regime of small
 $\alpha$
values to explore the transition between different swimmer types, as shown in figure 3(j–l). This phase diagram reveals the boundary where, for a given deformation amplitude
$\alpha$
values to explore the transition between different swimmer types, as shown in figure 3(j–l). This phase diagram reveals the boundary where, for a given deformation amplitude
 $\delta$
, the swimmer becomes neutral—meaning the stresslet strength is zero for non-zero value of
$\delta$
, the swimmer becomes neutral—meaning the stresslet strength is zero for non-zero value of
 $\gamma _3$
. Above this boundary curve, the swimmer predominantly exhibits the swimmer type corresponding to the majority contribution from the
$\gamma _3$
. Above this boundary curve, the swimmer predominantly exhibits the swimmer type corresponding to the majority contribution from the
 $n = 3$
mode. Below the curve, in a narrow range of
$n = 3$
mode. Below the curve, in a narrow range of
 $\alpha$
values, the swimmer displays the opposite type behaviour, corresponding to the dominance of the
$\alpha$
values, the swimmer displays the opposite type behaviour, corresponding to the dominance of the
 $n = 5$
mode. Therefore, for a given sign of
$n = 5$
mode. Therefore, for a given sign of
 $\delta$
, the swimmer can be a puller, pusher or neutral depending on the value of
$\delta$
, the swimmer can be a puller, pusher or neutral depending on the value of
 $\gamma _3 \equiv \alpha$
. Moreover, for a given value of
$\gamma _3 \equiv \alpha$
. Moreover, for a given value of
 $\gamma _3$
, the swimmer type can change depending on the amplitude of the deformation,
$\gamma _3$
, the swimmer type can change depending on the amplitude of the deformation,
 $\delta$
. The phase diagram provides a detailed view of how the competition between geometrical modes affects the overall swimmer type behaviour.
$\delta$
. The phase diagram provides a detailed view of how the competition between geometrical modes affects the overall swimmer type behaviour.
5. Conclusion
Our study presents a numerical analysis of the swimmer types of optimum surface-driven active particles, focusing on the interplay between the geometrical modes. Utilising the minimum dissipation theorem, we systematically evaluated the contributions of various geometrical modes to the swimming type of deformed spherical microswimmers. Our findings indicate that microswimmers with fore-and-aft symmetry exhibit neutral swimming type due to the cancellation of stresslet contributions. In contrast, asymmetrical geometries display distinct pusher- or puller-type behaviours depending on the dominant deformation mode and the nonlinear dependence of the stresslet on the deformation amplitude. The phase diagram constructed for small third Legendre mode of deformation reveals the sensitivity of the optimum swimmer type to geometric perturbations, providing insight into the transition between pusher and puller behaviour. These results contribute to a deeper understanding of the intricate relationship between geometry and swimming efficiency in active microswimmers, which could inform the design of artificial microswimmers for practical applications.
Acknowledgements.
We extend our sincere gratitude to P.E. Lammert for his insightful discussions and valuable comments.
Funding.
R.Z. and A.N. acknowledge support from the National Science Foundation CAREER award, grant number CBET-2238915. A.M.A. acknowledges support from the National Science Foundation, grant number CBET-2341154.
Declaration of interests.
The authors report no conflict of interest.

















 Open access
Open access