















Crossref Citations
This article has been cited by the following publications. This list is generated based on data provided by Crossref.
Chao, Li-Ming
Couzin, Iain D.
and
Li, Liang
2024.
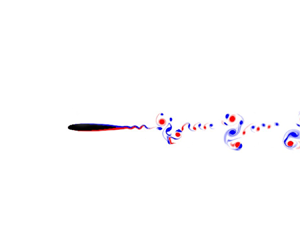
On turning maneuverability in self-propelled burst-and-coast swimming.
Physics of Fluids,
Vol. 36,
Issue. 11,