



Introduction
The genus Somniosus is a widely distributed group of deep-water sleeper sharks belonging to the family Somniosidae, and five species have been recognized to date: S. antarcticus Whitley, 1939, S. longus (Tanaka, 1912), S. microcephalus (Bloch & Schneider, 1801), S. pacificus Bigelow & Schroeder, 1944, and S. rostratus (Risso, 1827). The most well-studied species within the genus is the Greenland shark S. microcephalus, which is distributed in the North Atlantic and adjacent Arctic with a wide vertical distribution range from the surface to the deep sea and a maximum habitat depth of 2992 m (Watanabe et al., Reference Watanabe, Lydersen, Fisk and Kovacs2012; Mecklenburg et al., Reference Mecklenburg, Lynghammar, Johannesen, Byrkjedal, Christiansen, Dolgov, Karamushko, Mecklenburg, Møller, Steinke and Wienerroither2018). The species reaches up to 375 cm in total length (TL) for males and 550 cm TL for females (Mecklenburg et al., Reference Mecklenburg, Lynghammar, Johannesen, Byrkjedal, Christiansen, Dolgov, Karamushko, Mecklenburg, Møller, Steinke and Wienerroither2018). The Greenland shark has been reported to be the longest-lived known vertebrate species according to eye lens radiocarbon analyses (Nielsen et al., Reference Nielsen, Hedeholm, Heinemeier, Bushnell, Christiansen, Olsen, Ramsey, Brill, Simon, Steffensen and Steffensen2016). The estimated age of a large individual (502 cm TL) is 392 ± 120 years (Nielsen et al., Reference Nielsen, Hedeholm, Heinemeier, Bushnell, Christiansen, Olsen, Ramsey, Brill, Simon, Steffensen and Steffensen2016). The swimming speed of the Greenland sharks has been analysed using several different techniques. Watanabe et al. (Reference Watanabe, Lydersen, Fisk and Kovacs2012) measured it using data loggers attached to shark bodies. The sharks cruised at 0.34 m s−1 with a tail-beat frequency of 0.15 Hz, both of which were the lowest values across all fish species, adjusted for their size; reportedly, the swimming performance of Greenland sharks was limited by cold waters (~2 °C) (Watanabe et al., Reference Watanabe, Lydersen, Fisk and Kovacs2012). The swimming speed of Greenland sharks was also estimated from video analyses, which showed the average swimming speed of 0.27 m s−1 (SD = 0.07; range 0.15–0.42 m s−1) and no significant correlation between shark length and swimming speed (Devine et al., Reference Devine, Wheeland and Fisher2018). Ultrasonic tracking of Greenland sharks was conducted under Arctic ice, and the average rate of horizontal movement over ground was estimated as 0.215 m s−1 (Skomal & Benz, Reference Skomal and Benz2004). Archival pop-off tag tracking of Greenland sharks in the high Arctic waters showed that the average distance travelled is 0.6–16.6 km day−1 (Fisk et al., Reference Fisk, Lydersen and Kovacs2012).
The Pacific sleeper shark S. pacificus is one of the largest predators in deep Suruga Bay, Japan. It reaches 4.4 m TL or more (Mecklenburg et al., Reference Mecklenburg, Lynghammar, Johannesen, Byrkjedal, Christiansen, Dolgov, Karamushko, Mecklenburg, Møller, Steinke and Wienerroither2018). It is a demersal and typically mesobenthopelagic species distributed in the North Pacific and the Arctic, with a vertical range from the surface to a depth of 2205 m (Mecklenburg & Steinke, Reference Mecklenburg and Steinke2015; Mecklenburg et al., Reference Mecklenburg, Lynghammar, Johannesen, Byrkjedal, Christiansen, Dolgov, Karamushko, Mecklenburg, Møller, Steinke and Wienerroither2018). The deepest occurrence of the Pacific sleeper shark was recorded using a baited camera at a depth of 2205 m in Hawaiian waters (Yeh & Drazen, Reference Yeh and Drazen2009). It is thought that the sleeper shark is a voracious and versatile feeder that appears to feed mainly on the seafloor (Yang & Page, Reference Yang and Page1999). Its diet has been shown to include not only benthic invertebrates and fish, but also marine mammals, such as the harbour seals Phoca vitulina Linnaeus, 1758 and southern right whale dolphins Lissodelphis peronii (Laciphde, 1804) (Yang & Page, Reference Yang and Page1999). Because of their sluggish behaviour, it is assumed that S. pacificus individuals feed opportunistically on what they find in their environment (including carrion and fish offal) (Yang & Page, Reference Yang and Page1999). The Pacific sleeper sharks have also been documented to consume live, fast-swimming Pacific salmon Onchorhyncus spp. (Sigler et al., Reference Sigler, Hulbert, Lunsford, Thompson, Burek, O'Corry-Crowe and Hirons2006). Additionally, this species is considered a predator of juvenile Steller sea lions Eumetopias jubatus (Schreber, 1776) in the region of the Gulf of Alaska, which was shown using life history transmitters surgically implanted into the juvenile individuals (Horning & Mellish, Reference Horning and Mellish2014).
In 2016 and 2017, we conducted baited camera surveys in Suruga Bay, with the aim of obtaining information on the faunal diversity and biomass of deep-sea predatory/scavenging fish (Fujiwara et al., Reference Fujiwara, Kawato, Poulsen, Ida, Chikaraishi, Ohkouchi, Oguri, Gotoh, Ozawa, Tanaka, Miya, Sado, Kimoto, Toyofuku and Tsuchida2021). Suruga Bay, which is the deepest bay in Japan (maximum depth: ~2500 m), is in the central region of the Pacific coastline of the Japanese Archipelago. During our research (on 21 July 2016), we recorded a single individual of the Pacific sleeper shark using two baited camera systems deployed 436 m away from each other. The sleeper shark first arrived at camera #1, and the same individual appeared at camera #2 ~37 min after it disappeared from camera #1 view. Finally, the same individual returned to camera #1 ~31 min after leaving camera #2.
In the present study, we estimated the groundspeed and waterspeed of the sleeper shark based on the information of shark appearance along with the current profiles from electro-magnetic current meters installed on both baited camera systems. To the best of our knowledge, this is the first record of the swimming speed of S. pacificus to date. Noteworthy ambient temperature profiles, which might affect the swimming speed, and the population density are also reported.
Materials and methods
Baited camera deployment
Forty-eight casts of baited camera systems were conducted at depths between 118 and 2576 m in Suruga Bay, Shizuoka Prefecture, Japan to estimate the diversity and population density of predators/scavengers using the fishery boat ‘Chokane Maru’ and the training vessel ‘Shonan Maru’ belonging to the Kanagawa Prefectural Marine Science High School (Table 1). Two baited camera systems, BC1 and BC2, were deployed using ‘Chokane Maru’ on 21 July 2016 at 34°51.516′N 138°22.589′E at a depth of 609 m, landed at 9:10:53 Japan Standard Time (JST) (cast no. BC1-10) and at 34°51.377′N 138°22.820′E at a depth of 603 m, landed at 9:30:27 JST, 20 min after the deployment of camera #1 (cast no. BC2-10) (Figure 1). Each BC was composed of the following: an HD video recorder HDR-CX550V (Sony, Tokyo, Japan) equipped with a wide-conversion lens VCL-HGA07B (Sony) (horizontal angle: 87°; vertical angle: 57° both in air); a high intensity discharge lamp (24 V, 55 W) (Goto Aquatics, Manazuru, Japan) equipped with a R1 professional filter that produced red light (Kenko Tokina, Tokyo, Japan); two titanium alloy housings for the camera and lamp; an electro-magnetic current profiler Infinity-EM (JFE Advantech, Nishinomiya, Japan); a miniature salinity, temperature and depth logger DST-CTD (Star-Oddi, Garðabær, Iceland); a bait cage containing ~0.7 kg of fresh mackerel (BC1) or 0.7 kg of a fresh whale vertebra with a piece of meat (BC2) that was transferred from Gaibo Hogei Co. under the permission of the Fisheries Agency, Japan; a stainless steel frame; polyethylene ropes (12 mm in diameter); and a styrene foam float. Video images were taken under the ‘night shot’ mode. Both BCs were deployed from ‘Chokane Maru’ in the free-fall mode and were lifted with a rope when the observations were finished. Video recording was started ~15 min before landing and yielded a 4-h video footage. All data, including videos and current profiles, were recovered when the system was retrieved onboard.

Fig. 1. Research area and location of each baited camera deployment. Yellow stars indicate the deployment location of baited cameras. Magnified map shows the estimated diffusion ranges of odours from BC1-10 (blue) and BC2-10 (red). (A) Period between BC1 landing and first arrival of the sleeper shark at BC1; (B) first stay of the shark at BC1; (C) first travelling period; (D): first stay at BC2; (E) second travelling period; (F) second stay at BC1. This map was created using QGIS software version 2.14.10 (https://qgis.org/) and bathymetric data M7001 supplied by the Japan Hydrographic Association (https://www.jha.or.jp/en/jha/).
Table 1. Deployment information of baited camera systems

BC, mooring-type baited camera cast. AT: free fall-type baited camera cast. Details of AT are shown in Fujiwara et al. (Reference Fujiwara, Kawato, Poulsen, Ida, Chikaraishi, Ohkouchi, Oguri, Gotoh, Ozawa, Tanaka, Miya, Sado, Kimoto, Toyofuku and Tsuchida2021).
Swimming speed analysis
Swimming groundspeed of S. pacificus was estimated using the distance between the two BCs and the arrival/disappearance time recorded by each video camera installed on the BCs under the assumption of the shortest routes. Its swimming waterspeed was estimated using the groundspeed and current profiles. Two current profiles from the electro-magnetic current profilers installed on BC1 and BC2 were averaged during the ‘travelling periods’ of the shark between BC1 and BC2, and the average current profiles were subtracted from the groundspeed. As supporting evidence, the swimming speed was also calculated by measuring the elapsed time since the shark passed by the bait cage (30 cm in width) using video images.
Estimation of odour diffusion ranges and population density of sleeper sharks
The diffusion ranges of odours from the baits at any given time were estimated using a newly developed macro program running on Excel software (Microsoft, Redmond, WA, USA). This program estimated the maximum diffusion range using current velocity and direction per second over a given time period and the average swimming speed of each fish species. Smell sensitivity of the shark was not incorporated in the estimation of the diffusion area of smell, which might lead to an underestimation of the biomass, but not overestimation. Overestimation of the shark biomass could result in overfishing. Therefore, the maximum diffusion range was used for the estimate. Each estimated diffusion area during the periods between the landing of BCs and the first arrival of the sleeper sharks was considered to harbour a single sleeper shark. In case no shark arrived at the baited cameras, the diffusion areas estimated during the periods between the landing of the baited cameras and end of the observations (i.e. retrieval of BCs, lights-out, or cessation of recording) were regarded as no-sleeper shark areas. All ‘first arrival’ and ‘no-sleeper shark’ areas were integrated for each depth zone, that is, 0–500, 500–1000, 1000–1500, 1500–2000, 2000–2500 and 2500–3000 m, as the total observation area in each depth zone. The population density of sleeper sharks in each depth zone was estimated by dividing the ‘first arrival’ number by the total observation area.
Results
Shark observation and swimming speed analysis
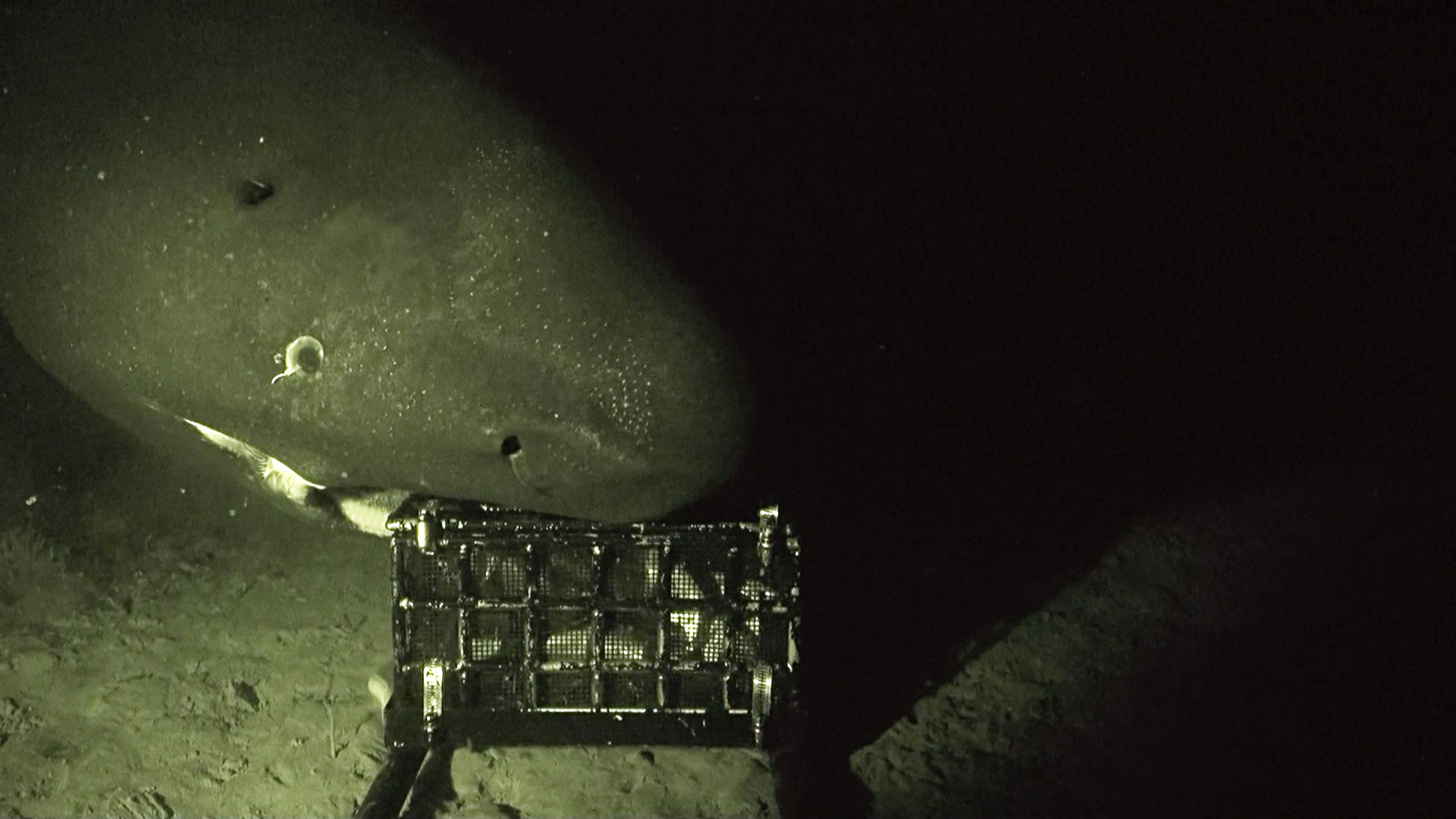
Two baited camera systems, BC1 and BC2, were deployed simultaneously on 21 July 2016 at depths of 609 and 603 m, respectively (Figure 1). The distance between BC1 and BC2 was 436 m, and the direction from BC1 to BC2 was 126.3°. The first arrival of the sleeper shark at BC1 was 43 min after the deployment of camera #1 at 9:53:40 JST (Figure 2). The individual was a female (Figure 2C), with an estimated total length of ~300 cm, which was compared with the size of the bait cage (30 cm in width). There were several remarkable features of the shark, including its snout tangled in a broken fishing line (Figure 2A, E), two torn anteriormost gill septums (Figure 2B, D–F), and a parasitic copepod attached to each eye (Figure 2A, D–F). This shark spent 41 min around BC1 during its first stay and frequently moved in and out of the camera's field of view until 84 min after the deployment of camera #1. It sometimes attacked the bait cage, knocked against the camera frame, and sucked the muddy sediments around the bait cage (Supplementary Video 1). The directions of the current were westward at BC1 and northward at BC2 until the shark left BC1, after which the flow changed to the east at both BC sites (Figure 1).

Fig. 2. Somniosus pacificus. (A)–(F) In situ video grabs of a single individual of S. pacificus recorded using two baited camera systems (BC1 and BC2). (A)–(C) the shark during its first stay at BC1; (D) and (E) the shark during its first stay at BC2; (F) the shark during its second stay at BC1. Arrow indicates the left pelvic fin without a clasper.
The same individual, showing the same morphological features as the individual that arrived at BC1, appeared at BC2 37 min after leaving BC1 (121 min after the deployment of camera #1) (Figure 2D, E). During the first travelling period, the average current speed was 0.073 m s−1, and the direction was 139.9°, which was almost the same as the direction from BC1 to BC2. The groundspeed of the shark was 0.20 m s−1 with heading to 126.3°, and the waterspeed was 0.13 m s−1 with heading to 118.6°. According to the estimated odour diffusion areas during this travelling period, the odour from BC2 did not reach BC1. It spent 33 min around BC2 (until 154 min after the deployment of camera #1), and it sometimes knocked against the bait cage and the camera frame (Supplementary Video 1). When the shark left BC2, the odour from BC1 came closer to BC2; the minimum distance from BC2 to the odour area was estimated to be 134 m.
The same individual appeared again at BC1 31 min after leaving BC2 (185 min after the deployment of camera #1) (Figure 2F). During the second travelling period, its average current speed was 0.14 m s−1, and its direction was 105.4°. The groundspeed of the shark was 0.23 m s−1 with heading to 306.3°, and the waterspeed was 0.37 m s−1 with heading to 298.3°. The shark spent 3 min around BC1 until 188 min after the deployment of camera #1, rubbing the camera frame once on its body during this stay.
The swimming speed was also preliminarily calculated by measuring the elapsed time since the shark passed the bait cage (30 cm in width) using video images (N = 3). The calculated speeds were 0.14, 0.16 and 0.22 m s−1.
Population density estimate of sleeper sharks
During 48 camera casts conducted in the present study, Pacific sleeper sharks appeared at baited cameras four times (BC1-10, BC2-10, BC2-21 and BC2-30 at depths of 609, 603, 962 and 542 m, respectively) (Table 1). The appearance of the shark at BC2-10 was excluded from the population density analyses due to the effects of odour plumes from BC1-10. Pacific sleeper sharks appeared only in the 500–1000-m depth zone, and the estimated population density of the shark was 1.6 ind.km−2 in the depth zone in Suruga Bay. Therefore, it was estimated that ~1150 sleeper sharks live in Suruga Bay at depths between 500 and 1000 m.
Discussion
To the best of our knowledge, this is the first reported record of the swimming speed of S. pacificus. In addition, both groundspeed and waterspeed of deep-sea creatures are rarely estimated. The waterspeed of the Greenland shark, which is the sister species of S. pacificus according to a molecular phylogenetic study using complete mitochondrial genomes (Santaquiteria et al., Reference Santaquiteria, Nielsen, Klemetsen, Willassen and Præbel2017), has been reported (Watanabe et al., Reference Watanabe, Lydersen, Fisk and Kovacs2012). The sharks cruised at 0.34 m s−1 with a tail-beat frequency of 0.15 Hz, both of which were the lowest values across fish species, adjusted for their size (Watanabe et al., Reference Watanabe, Lydersen, Fisk and Kovacs2012). In addition, three other studies showed swimming speeds similar to Greenland sharks (Skomal & Benz, Reference Skomal and Benz2004; Fisk et al., Reference Fisk, Lydersen and Kovacs2012; Devine et al., Reference Devine, Wheeland and Fisher2018). The average groundspeed (0.21 m s−1) and average waterspeed (0.25 m s−1) of the sleeper shark in the present study were comparable with those reported in previous studies (Skomal & Benz, Reference Skomal and Benz2004; Fisk et al., Reference Fisk, Lydersen and Kovacs2012; Watanabe et al., Reference Watanabe, Lydersen, Fisk and Kovacs2012; Devine et al., Reference Devine, Wheeland and Fisher2018). It is possible that the shark routes in the present study may not have been straight lines between BC1 and BC2, which could have led to underestimations of the swimming speed. Therefore, the swimming speed was also preliminarily calculated by measuring the elapsed time since the shark passed the bait cage (30 cm in width) using video images, although the accuracy of this measurement was relatively low due to low visibility and the passing direction of the shark. The preliminarily calculated speed was 0.14–0.22 m s−1, which was comparable with the estimates obtained using the camera array. In addition, the swimming speeds of the shark in the first and second travelling periods were similar. Therefore, we conclude that the swimming speed of the Pacific sleeper shark was similar to that of the Greenland shark, and that the Pacific sleeper shark was one of the slowest swimming fish species, adjusted for size.
The Pacific sleeper shark is an opportunistic and versatile predator capable of feeding on a wide range of surface and bottom animals, including flatfishes, salmons, rockfishes, seals, octopuses, squids, crabs, gastropods, and carrion, and their diet shifts to teleost and cetacean carrion as they grow (Compagno, Reference Compagno1984; Sigler et al., Reference Sigler, Hulbert, Lunsford, Thompson, Burek, O'Corry-Crowe and Hirons2006; Yano et al., Reference Yano, Stevens and Compagno2007). Despite moving lethargically, Pacific sleeper sharks consume large, fast-swimming fish, such as the Pacific salmon (Gotshall, Reference Gotshall1965; Orlov & Moiseev, Reference Orlov and Moiseev1999; Yang & Page, Reference Yang and Page1999) and albacore tuna Thunnus alalonga (Bonnaterre, 1788) (Ebert, Reference Ebert1987). Parts of harbour seals have also been occasionally found in the stomach contents of Pacific sleeper sharks (Bright, Reference Bright1959; Compagno, Reference Compagno1984; Orlov & Moiseev, Reference Orlov and Moiseev1999). Ebert (Reference Ebert1994) indicated that the large buccal cavity of the Pacific sleeper shark seems to act as a vacuum for sucking prey and that the shark can catch fast-swimming prey by waiting to ambush. The sevengill shark Notorynchus cepedianus (Péron, 1807) can catch fast-swimming prey by gliding, with limited body movement, to investigate potential food sources (Ebert, Reference Ebert1991). Pacific sleeper sharks may also employ stealth and ambush hunting strategies that incorporate slow and deliberate vertical oscillations in search of prey, along with cryptic colouration and cover of darkness to avoid detection (Hulbert et al., Reference Hulbert, Sigler and Lunsford2006). Similar strategies are used by Greenland sharks. Greenland sharks are known to act as both scavengers and predators (Beck & Mansfield, Reference Beck and Mansfield1969; Lucas & Natanson, Reference Lucas and Natanson2010; Leclerc et al., Reference Leclerc, Lydersen, Haug, Glover, Fisk and Kovacs2011; Nielsen et al., Reference Nielsen, Hedeholm, Simon and Steffensen2014). It is unclear how Greenland sharks prey on active mammalians, such as the ringed seals Pusa hispida (Schreber, 1775), harbour seals, hooded seals Cystophora cristata (Erxleben, 1777) and bearded seals Erignathus barbatus (Erxleben, 1777) (Fisk et al., Reference Fisk, Tittlemier, Pranschke and Norstrom2002; Yano et al., Reference Yano, Stevens and Compagno2007; Leclerc et al., Reference Leclerc, Lydersen, Haug, Bachmann, Fisk and Kovacs2012). Given the high rate of seal occurrence and the condition of the materials in Greenland shark stomach content, it is unlikely that all of these prey items are the result of scavenging (Lydersen et al., Reference Lydersen, Fisk and Kovacs2016). Therefore, it seemed logical that the predation events took place when the seals were sleeping (Watanabe et al., Reference Watanabe, Lydersen, Fisk and Kovacs2012; Lydersen et al., Reference Lydersen, Fisk and Kovacs2016). In any case, the sleeper sharks can feed on agile prey despite their very low swimming speed. Direct observations of the feeding behaviour of sharks may reveal their actual feeding strategy. Autonomous underwater vehicles (AUVs) have recently been used to track the great white shark Carcharodon carcharias (Linnaeus, 1758) (Skomal et al., Reference Skomal, Hoyos-Padilla, Kukulya and Stokey2015; Kukulya et al., Reference Kukulya, Stokey, Fiester, Padilla and Skomal2016). Such techniques provide new and innovative tools for elucidating the detailed behaviour of deep-sea sharks.
It was presumed that the very low swimming speed of Greenland shark is a consequence of cold polar water that negatively affects their locomotor muscle functions (Watanabe et al., Reference Watanabe, Lydersen, Fisk and Kovacs2012). We installed a single CTD in both BC1 and BC2, and the average temperatures were 5.3 °C and 5.4 °C, respectively, during the observation period. The ambient temperature of the Pacific sleeper shark habitat is considerably higher than that of the Greenland shark habitat (~2 °C) as previously reported (Watanabe et al., Reference Watanabe, Lydersen, Fisk and Kovacs2012; Devine et al., Reference Devine, Wheeland and Fisher2018). Therefore, it is difficult to presume that the very low swimming speed of the sleeper shark is a consequence of the ambient cold-water temperature. In fact, according to the findings of a previous study, water temperature does not seem to significantly correlate with the swimming speed of Greenland shark (Watanabe et al., Reference Watanabe, Lydersen, Fisk and Kovacs2012). Similar swimming speeds (<0.4 m s−1) have been reported for the deep-sea sharks, bluntnose sixgill shark Hexanchus griseus and prickly shark Echinorhinus cookei, at relatively high temperatures (6.2–13.2 °C) (Nakamura et al., Reference Nakamura, Meyer and Sato2015). In addition, several teleost fish are known to be slow swimmers. The swimming speed of abyssal grenadier Coryphaenoides armatus and the blue-hake Antimora rostrata is low (<0.22 m s−1) (Collins et al., Reference Collins, Priede and Bagley1999); Coryphaenoides spp. swim at a speed of less than 0.13 m s−1 (Leitner et al., Reference Leitner, Neuheimer, Donlon, Smith and Drazen2017), although these teleost fish are considerably smaller than the elasmobranchs.
Metabolism in some animal groups is known to decline with depth, even after adjusting for size and temperature (Drazen & Seibel, Reference Drazen and Seibel2007). Low metabolic rates in the deep sea and elsewhere are not due to resource limitations (such as food and oxygen) or temperature or pressure constraints (Seibel & Drazen, Reference Seibel and Drazen2007). The ‘visual interactions hypothesis’ (VIH) (Childress & Mickel, Reference Childress and Mickel1985) suggests that in the absence of light, the distances between predators and prey are reduced, thereby reducing selective pressure on rapid locomotory capacity for tracking and avoidance (Lythgoe, Reference Lythgoe, Atema, Fay, Popper and Tavolga1988; Childress, Reference Childress1995). This theory is supported by evidence that non-visual animals, such as chaetognaths, medusa and worms, do not show a depth-related decline in metabolic rate, but visual taxa, such as cephalopods, crustaceans and teleosts, do (Sullivan & Somero, Reference Sullivan and Somero1980; Thuesen & Childress, Reference Thuesen and Childress1993a, Reference Thuesen and Childress1993b; Seibel et al., Reference Seibel, Thuesen, Childress and Gorodezky1997; Seibel & Drazen, Reference Seibel and Drazen2007). Condon et al. (Reference Condon, Friedman and Drazen2012) reported that deep-sea elasmobranchs also have lower locomotor and metabolic capacities than shallow-water relatives. These trends predicted by VIH are similar to those of teleosts and some visual taxa and provide compelling evidence for this hypothesis (Condon et al., Reference Condon, Friedman and Drazen2012). Therefore, the low swimming speed of the sleeper sharks may also be explained by the hypothesis.
To our knowledge, this is the first study to estimate the population density of the Pacific sleeper sharks. In the present study, Pacific sleeper sharks appeared at depths between 554 and 962 m, which is comparable with the sampling records of the sleeper sharks in Suruga Bay at depths between 300 and 960 m (Tanaka et al., Reference Tanaka, Yano and Ichihara1982; Yano et al., Reference Yano, Stevens and Compagno2004, Reference Yano, Stevens and Compagno2007). The abundance of Pacific sleeper sharks in the 500–1000-m depth zone in Suruga Bay (1.6 ind.km−2) is higher than the minimum abundance of Greenland sharks in Arctic waters (0.4 ind.km−2 in Resolute Bay) and is considerably lower than the maximum abundance (15.5 ind.km−2 in Scott Inlet) reported in a previous study (Devine et al., Reference Devine, Wheeland and Fisher2018). Primary production in Suruga Bay is relatively high (Nakata, Reference Nakata2002), but many large predatory sharks inhabit the region, namely, the bluntnose sixgill shark Hexanchus griseus (Bonnaterre, 1788), the gulper shark Centrophorus granulosus (Bloch & Schneider, 1801), the leafscale gulper shark C. squamosus (Bonnaterre, 1788), the roughskin dogfish Centroscymnus owstoni Garman, 1906, and the Portuguese dogfish C. coelolepis Barbosa du Bocage & de Brito Capello, 1864 (Yano & Tanaka, Reference Yano and Tanaka1983; Kanesawa & Tanaka, Reference Kanesawa and Tanaka2007; Kyne & Simpfendorfer, Reference Kyne and Simpfendorfer2007). Interspecific competitions between these predators may influence the population density of the Pacific sleeper sharks. In fact, dietary overlaps and discrimination are well documented in elasmobranch species in the western Mediterranean Sea including the little sleeper shark Somniosus rostratus, which belongs to the same genus as S. pacificus (Carrasson et al., Reference Carrasson, Stefanescu and Cartes1992; Valls et al., Reference Valls, Quetglas, Ordines and Moranta2011, Reference Valls, Rueda and Quetglas2017; Barría et al., Reference Barría, Coll and Navarro2015). Further dietary analyses of these predators will clarify the trophic relationships between species.
It is important and useful to conduct field experiments in marine environments using data loggers. The data of various parameters, such as salinity, temperature, depth, acceleration, tail-beat frequency and light intensity, acquired using loggers, help understand the ecology of deep-sea organisms. However, the level of damage during the sampling and installation of equipment on deep-sea organisms at the water surface and their recovery rates are still unclear. It is also uncertain whether the results obtained from specimens equipped with invasive data loggers are the same as those obtained from intact individuals. In contrast, the method used in this study was non-invasive. The only unnatural physicochemical parameter was the red light, which the sharks were able to avoid. Baited cameras deployed in the deep sea are good for field research on ecosystems such as predator/scavenger biodiversity and population estimate, but are not good for tracking individuals continuously. Therefore, baited cameras complemented to other methods could play an important role in studies on deep-sea predators. Several predators worldwide are endangered and strictly protected. Large, predatory sharks may be at or near the top of the trophic structures that support marine ecosystems and thus, they may be keystone predators essential for the maintenance and stability of food webs (Myers et al., Reference Myers, Baum, Shepherd, Powers and Peterson2007). Therefore, in the future, less invasive methods have to be considered for investigating deep-sea organisms, especially vulnerable, predatory species.
Supplementary material
The supplementary material for this article can be found at https://doi.org/10.1017/S0025315421000321
Acknowledgements
We thank Messrs. Hisashi Hasegawa and Kazutaka Hasegawa from the fishery boat ‘Chokane Maru’ as well as the captain and crew of the training vessel ‘Shonan Maru’ for baited camera surveys. We also thank Messrs Masaaki Goto and Mitsunori Goto (Goto Aquatics) and Dr Kazumasa Oguri for the development of baited camera systems, Dr Katsunori Fujikura (Japan Agency for Marine-Earth Science and Technology, JAMSTEC) for scientific advice, Mses Ayaka Takayama (JAMSTEC), Yoshimi Umezu (JAMSTEC), and Momoko Koiso (Toho University) for research assistance, and Gaibo Hogei Co for whale bone supply. We would like to thank Editage (www.editage.jp) for English language editing.
Financial support
This work was supported by the JAMSTEC grants for operational expenses and partially supported by JSPS KAKENHI to YF (Grant number JP16H04611).






 Open access
Open access