


1. Introduction
Knotoids were introduced by Turaev in [
Reference Turaev31
] as an extension of classical knot theory. Knotoids are equivalence classes of generic immersions of [0,1] into
 $S^2$
considered up to isotopy and Reidemeister moves away from the endpoints. At the endpoints, here called poles, there is a forbidden fourth move, disallowing an endpoint from moving over/under a strand. Knotoids have been studied recently in various papers, including among many others [
Reference Bhataineh7, Reference Gügümcü and Kauffman17, Reference Kim, Im and Lee24, Reference Kutluay26
]. They have also received attention for their potential as protein models, for example in [
Reference Dorier, Goundaroulis, Benedetti and Stasiak10
] and [
Reference Goundaroulis, Dorier and Stasiak14
].
$S^2$
considered up to isotopy and Reidemeister moves away from the endpoints. At the endpoints, here called poles, there is a forbidden fourth move, disallowing an endpoint from moving over/under a strand. Knotoids have been studied recently in various papers, including among many others [
Reference Bhataineh7, Reference Gügümcü and Kauffman17, Reference Kim, Im and Lee24, Reference Kutluay26
]. They have also received attention for their potential as protein models, for example in [
Reference Dorier, Goundaroulis, Benedetti and Stasiak10
] and [
Reference Goundaroulis, Dorier and Stasiak14
].
We introduce generalised knotoids and define analogs of knotoid invariants for generalised knotoids. The theory of generalised knotoids in
 $S^2$
subsumes knot theory and its various extensions, including both planar and spherical (multi-)knotoids as originally defined in [
Reference Turaev31
], the multi-linkoids of [
Reference Gabrovšek and Gügümcü12
], long knots as in [
Reference Kashaev22
], string links as in [
Reference Turaev30
], the polar knots of [
Reference Bhataineh8
] and so-called staked links coming from adding valency zero poles to link diagrams. Generalised knotoids are also interesting in their own right, and we include several conjectures concerning their properties.
$S^2$
subsumes knot theory and its various extensions, including both planar and spherical (multi-)knotoids as originally defined in [
Reference Turaev31
], the multi-linkoids of [
Reference Gabrovšek and Gügümcü12
], long knots as in [
Reference Kashaev22
], string links as in [
Reference Turaev30
], the polar knots of [
Reference Bhataineh8
] and so-called staked links coming from adding valency zero poles to link diagrams. Generalised knotoids are also interesting in their own right, and we include several conjectures concerning their properties.
We also introduce knotoidal graphs as a further extension of generalised knotoids. This definition is a natural extension of spatial graphs, bonded knotoids as in [ Reference Goundaroulis, Gügümcü, Lambropoulou, Dorier, Stasiak and Kauffman15 ] and [ Reference Gügümcü, Gabrovsek and Kauffman16 ] and graphoids as in [ Reference Gügümcü, Gabrovsek and Kauffman16 ] and [ Reference Gügümcü, Kauffman and Pongtanapaisan19 ]. Knotoidal graphs may provide a useful model for proteins that consist of more than one protein molecule bonded together as occurs for hemoglobin and insulin for instance. Finally, we introduce hyperbolicity as an invariant for knotoidal graphs.
1·1. Organisation
In Section 2, we define generalised knotoid theory and describe its relation to various existing extensions of knot theory. The three sections that follow describe analogs of knotoid invariants for generalised knotoids. In Section 3, we generalise the notion of height and extend a theorem of Kauffman and Gügümcü [ Reference Gügümcü and Kauffman18 ] regarding height in minimal-crossing diagrams. In Section 4, we define a family of polynomial invariants for generalised knotoids that extend existing index polynomials for knotoids, and in Section 5, we define a bracket polynomial that generalises existing bracket polynomial invariants for knotoids.
In Section 6, we define knotoidal graphs. We also describe rail diagrams for knotoidal graphs, which provide a useful topological point of view. In Section 7, we use rail diagrams to extend a map defined in [
Reference Adams, Bonat, Chande, Chen, Jiang, Romrell, Santiago, Shapiro and Woodruff2
] for spherical knotoids to knotoidal graphs. This map takes knotoidal graphs to spatial graphs in manifolds which are either handlebodies or thickened surfaces. Then we define hyperbolicity and hyperbolic volumes of knotoidal graphs and discuss some applications. In particular, we prove that every knot in
 $S^3$
can be staked to be hyperbolic and thus has a well-defined minimum staked volume.
$S^3$
can be staked to be hyperbolic and thus has a well-defined minimum staked volume.
2. Generalised knotoids
Let
 $\Sigma$
denote a closed orientable surface and G a finite graph. We do not require G to be connected or simple, and G may have valency-zero vertices. Let
$\Sigma$
denote a closed orientable surface and G a finite graph. We do not require G to be connected or simple, and G may have valency-zero vertices. Let
 $\tilde G$
denote the disjoint union of G with a finite collection of circles. The edges and circles of
$\tilde G$
denote the disjoint union of G with a finite collection of circles. The edges and circles of
 $\tilde G$
are called its constituents.
$\tilde G$
are called its constituents.
A generalised knotoid diagram
 ${\mathcal{D}}$
is a generic immersion of
${\mathcal{D}}$
is a generic immersion of
 $\tilde G$
in
$\tilde G$
in
 $\Sigma$
whose only singularities are transverse double points, called crossings, which are labelled with over/undercrossing data. For brevity, we will also use
$\Sigma$
whose only singularities are transverse double points, called crossings, which are labelled with over/undercrossing data. For brevity, we will also use
 ${\mathcal{D}}$
to refer to the image of the immersion. The graph G (resp.
${\mathcal{D}}$
to refer to the image of the immersion. The graph G (resp.
 $\tilde G)$
is called the underlying graph (resp. underlying looped graph) of
$\tilde G)$
is called the underlying graph (resp. underlying looped graph) of
 ${\mathcal{D}}$
. Let
${\mathcal{D}}$
. Let
 $P({\mathcal{D}})$
denote the set of images of the vertices of
$P({\mathcal{D}})$
denote the set of images of the vertices of
 $\tilde G$
, called the poles of
$\tilde G$
, called the poles of
 ${\mathcal{D}}$
. The valency of a pole
${\mathcal{D}}$
. The valency of a pole
 $p \in P({\mathcal{D}})$
is the valency of its corresponding vertex in the underlying graph G. A valency zero pole is also called an isolated pole.
$p \in P({\mathcal{D}})$
is the valency of its corresponding vertex in the underlying graph G. A valency zero pole is also called an isolated pole.
Let
 $E({\mathcal{D}})$
denote the set of images of the edges of
$E({\mathcal{D}})$
denote the set of images of the edges of
 $\tilde G$
, called segment constituents of
$\tilde G$
, called segment constituents of
 ${\mathcal{D}}$
, and let
${\mathcal{D}}$
, and let
 $L({\mathcal{D}})$
denote the images of the circles of
$L({\mathcal{D}})$
denote the images of the circles of
 $\tilde G$
, called loop constituents of
$\tilde G$
, called loop constituents of
 ${\mathcal{D}}$
. Let
${\mathcal{D}}$
. Let
 $C({\mathcal{D}}) \;:\!=\; E({\mathcal{D}}) \cup L({\mathcal{D}})$
denote the set of constituents of
$C({\mathcal{D}}) \;:\!=\; E({\mathcal{D}}) \cup L({\mathcal{D}})$
denote the set of constituents of
 ${\mathcal{D}}$
. A labelling of the vertices of G induces a labelling of the poles of
${\mathcal{D}}$
. A labelling of the vertices of G induces a labelling of the poles of
 ${\mathcal{D}}$
. Similarly, a labelling (resp. an orientation) of the constituents of
${\mathcal{D}}$
. Similarly, a labelling (resp. an orientation) of the constituents of
 $\tilde G$
induces a labelling (resp. orientation) of the constituents of
$\tilde G$
induces a labelling (resp. orientation) of the constituents of
 ${\mathcal{D}}$
.
${\mathcal{D}}$
.
We introduce an equivalence relation on generalised knotoid diagrams in
 $\Sigma$
generated by ambient isotopy and the three standard Reidemeiester moves away from the poles. Observe that it is forbidden for a constituent to pass through a pole and for “twists” to be created or destroyed near a pole. See Figure 1. We remark that the forbidden twist move of Figure 1 parallels the forbidden move for vertices in a rigid-vertex spatial graph.
$\Sigma$
generated by ambient isotopy and the three standard Reidemeiester moves away from the poles. Observe that it is forbidden for a constituent to pass through a pole and for “twists” to be created or destroyed near a pole. See Figure 1. We remark that the forbidden twist move of Figure 1 parallels the forbidden move for vertices in a rigid-vertex spatial graph.

Fig. 1. The pole slide move (top) and the pole twist move (bottom) are forbidden, irrespective of the crossing data chosen for the diagrams on the right.
A generalised knotoid
 $\kappa$
is an equivalence class of generalised knotoid diagrams. It is clear that equivalency respects the number of poles and constituents as well as their associated data; in particular, we may speak of labelled and/or oriented generalised knotoids as equivalence classes of labelled and/or oriented generalised knotoid diagrams. Note that allowing twisting near poles yields a different theory of generalised knotoids, which we do not consider in this paper. However, some of the invariants we define later are able to distinguish between generalised knotoids which differ only by twists near poles and are otherwise identical.
$\kappa$
is an equivalence class of generalised knotoid diagrams. It is clear that equivalency respects the number of poles and constituents as well as their associated data; in particular, we may speak of labelled and/or oriented generalised knotoids as equivalence classes of labelled and/or oriented generalised knotoid diagrams. Note that allowing twisting near poles yields a different theory of generalised knotoids, which we do not consider in this paper. However, some of the invariants we define later are able to distinguish between generalised knotoids which differ only by twists near poles and are otherwise identical.
An equivalent, topological viewpoint is to define a generalised knotoid diagram as a generic immersion of
 $\tilde{G}$
, where all vertices of G have valency at least one, in a compact orientable surface
$\tilde{G}$
, where all vertices of G have valency at least one, in a compact orientable surface
 $\Sigma$
with or without boundary. Given such a diagram on a compact surface, we may recover a diagram on a closed surface by capping off each boundary component with a disk, then collapsing each disk to a point representing an isolated pole. Conversely, given a generalised knotoid diagram on a closed surface with isolated poles, we may remove an open disk neighbourhood of each isolated pole. That is, the theory of generalised knotoids on closed surfaces with isolated poles is equivalent to the theory of generalised knotoids on compact surfaces without isolated poles. We rely on both viewpoints, especially in Section 7 where the topological viewpoint proves useful.
$\Sigma$
with or without boundary. Given such a diagram on a compact surface, we may recover a diagram on a closed surface by capping off each boundary component with a disk, then collapsing each disk to a point representing an isolated pole. Conversely, given a generalised knotoid diagram on a closed surface with isolated poles, we may remove an open disk neighbourhood of each isolated pole. That is, the theory of generalised knotoids on closed surfaces with isolated poles is equivalent to the theory of generalised knotoids on compact surfaces without isolated poles. We rely on both viewpoints, especially in Section 7 where the topological viewpoint proves useful.

Fig. 2. Generalised knotoid diagrams.
We denote the case
 $\Sigma = S^2$
by classical generalised knotoid theory. In the remainder of this paper, a generalised knotoid is assumed to be classical unless otherwise stated.
$\Sigma = S^2$
by classical generalised knotoid theory. In the remainder of this paper, a generalised knotoid is assumed to be classical unless otherwise stated.
Example 2·1. See Figure 2 for some diagrams of generalised knotoids. The reader may verify that Figures 2(b) and 2(c) represent equivalent generalised knotoids. Figure 2(f) represents an oriented generalised knotoid.
Example 2·2. A spherical knotoid is a generalised knotoid with two poles and a single segment constituent between them.
Example 2·3. A planar knotoid is a generalised knotoid with three poles and a single segment constituent connecting two of them. The equivalency of the two notions is obtained by identifying the isolated pole of the generalised knotoid with the point at infinity of the planar knotoid diagram. This example provides a useful viewpoint for a number of invariants defined for planar knotoids, and it motivates parts of the constructions of invariants for generalised knotoids in Sections 4 and 5.
Example 2·4. A classical knot or link is a generalised knotoid with no poles.
Example 2·5. The multi-linkoids of [ Reference Gabrovšek and Gügümcü12 ] are generalised knotoids whose poles all have valency one.
Example 2·6. For a positive integer n, an n-polar knot [
Reference Bhataineh8
] is a generalised knotoid with no loop constituents and whose underlying graph is the cycle graph
 $C_n$
. An n-polar knot diagram looks like a classical knot diagram with n poles placed on the knot, away from the crossings. Long knots [
Reference Kashaev22
] can be thought of as 1-polar knots, and the equivalency of the two notions is obtained by identifying the single pole of a polar knot diagram with the point at infinity in a long knot diagram.
$C_n$
. An n-polar knot diagram looks like a classical knot diagram with n poles placed on the knot, away from the crossings. Long knots [
Reference Kashaev22
] can be thought of as 1-polar knots, and the equivalency of the two notions is obtained by identifying the single pole of a polar knot diagram with the point at infinity in a long knot diagram.
Example 2·7. A string link with n strings is defined in [
Reference Turaev30
] as the embedding of a finite set of closed intervals
 $I_1, I_2, \dots, I_n$
in
$I_1, I_2, \dots, I_n$
in
 $D \times I$
where D is the unit disk in the xy-plane, such that the initial point of
$D \times I$
where D is the unit disk in the xy-plane, such that the initial point of
 $I_i$
is sent to
$I_i$
is sent to
 $(x_i, 0,0)$
, and the final point is sent to
$(x_i, 0,0)$
, and the final point is sent to
 $(x_i, 0,1)$
, where
$(x_i, 0,1)$
, where
 $-1 < x_1 < x_2 < \dots < x_n < 1$
. This is defined up to ambient isotopy of the strings with fixed endpoints.
$-1 < x_1 < x_2 < \dots < x_n < 1$
. This is defined up to ambient isotopy of the strings with fixed endpoints.

Fig. 3. The string link in Figure 3(a) corresponds to the generalised knotoid in Figure 3(b). The fact that Reidemeister moves must occur away from the pole captures the fact that the endpoints of the string link’s segments are fixed.
We represent a string link as a generalised knotoid with a single pole of valency 2n. See Figure 3. If we thicken the sphere, we may consider the pole as the removal of a neighbourhood of a single vertical line in
 $S^2 \times I$
(bringing the ambient space to
$S^2 \times I$
(bringing the ambient space to
 $D\times I$
) and the constituents as embedded segments with endpoints on the circle boundary of
$D\times I$
) and the constituents as embedded segments with endpoints on the circle boundary of
 $D \times \{1/2\}$
. (See Section 6·2 for a discussion on rail diagrams.) The legs of the strings appear in clockwise order
$D \times \{1/2\}$
. (See Section 6·2 for a discussion on rail diagrams.) The legs of the strings appear in clockwise order
 $\ell_1, \ell_2, \dots, \ell_n$
around the circle boundary of
$\ell_1, \ell_2, \dots, \ell_n$
around the circle boundary of
 $D \times \{1/2\}$
followed by the heads of the strings in clockwise order
$D \times \{1/2\}$
followed by the heads of the strings in clockwise order
 $h_n, h_{n-1}, \dots, h_1$
. Since the pole twist move is disallowed, these endpoints are fixed in their order around the circle, and we recover the notion of a string link.
$h_n, h_{n-1}, \dots, h_1$
. Since the pole twist move is disallowed, these endpoints are fixed in their order around the circle, and we recover the notion of a string link.
Example 2·8. We define staked links on a surface
 $\Sigma$
to be the class of generalised knotoids on
$\Sigma$
to be the class of generalised knotoids on
 $\Sigma$
with no segment constituents and at least one pole. A diagram of a staked link looks like a link diagram on
$\Sigma$
with no segment constituents and at least one pole. A diagram of a staked link looks like a link diagram on
 $\Sigma$
with isolated poles placed in the complementary regions of the link diagram on
$\Sigma$
with isolated poles placed in the complementary regions of the link diagram on
 $\Sigma$
. An example appears in Figure 2(d).
$\Sigma$
. An example appears in Figure 2(d).
We have subsequently learned that in [ Reference Goldman and Kauffman13 ], Goldman and Kauffman defined tunnel links that are equivalent to staked links with two stakes and that were generated by considering conductance of link diagrams. In more recent as-of-yet unpublished work, independent of our work, Kaufmman and Gügümcü have been investigating properties of staked links under the name starred links.
3. Height for generalised knotoids
We review the notion of height for knotoids, defined originally as complexity in [
Reference Turaev31
]. Let
 ${\mathcal{D}}$
be a knotoid diagram on
${\mathcal{D}}$
be a knotoid diagram on
 $\Sigma$
, and let
$\Sigma$
, and let
 $\alpha$
be an embedded arc in
$\alpha$
be an embedded arc in
 $\Sigma$
connecting the endpoints that intersects
$\Sigma$
connecting the endpoints that intersects
 ${\mathcal{D}}$
transversely and away from the crossings. We call
${\mathcal{D}}$
transversely and away from the crossings. We call
 $\alpha$
a shortcut. The diagram height
$\alpha$
a shortcut. The diagram height
 $h({\mathcal{D}})$
is the number of intersections of
$h({\mathcal{D}})$
is the number of intersections of
 $\alpha$
with
$\alpha$
with
 ${\mathcal{D}}$
not including the endpoints, minimised over all shortcuts
${\mathcal{D}}$
not including the endpoints, minimised over all shortcuts
 $\alpha$
. The height of a knotoid k is the minimum of h(D) over all diagrams
$\alpha$
. The height of a knotoid k is the minimum of h(D) over all diagrams
 ${\mathcal{D}}$
representing k, and a diagram
${\mathcal{D}}$
representing k, and a diagram
 ${\mathcal{D}}$
attaining this minimum realises the height.
${\mathcal{D}}$
attaining this minimum realises the height.
This definition extends to generalised knotoids in a natural way. Let
 ${\mathcal{D}}$
be a pole-labelled generalised knotoid diagram on
${\mathcal{D}}$
be a pole-labelled generalised knotoid diagram on
 $\Sigma$
and let
$\Sigma$
and let
 $A,B \in P({\mathcal{D}})$
be distinct poles. A shortcut
$A,B \in P({\mathcal{D}})$
be distinct poles. A shortcut
 $\alpha$
between A and B is an embedded arc in
$\alpha$
between A and B is an embedded arc in
 $\Sigma$
with endpoints at A and B that intersects
$\Sigma$
with endpoints at A and B that intersects
 ${\mathcal{D}}$
transversely and away from crossings and poles. (If
${\mathcal{D}}$
transversely and away from crossings and poles. (If
 $A=B$
, we define a shortcut in the same way with “embedded arc” replaced by “simple closed curve”.) The diagram height between A and B, denoted
$A=B$
, we define a shortcut in the same way with “embedded arc” replaced by “simple closed curve”.) The diagram height between A and B, denoted
 $h_{{\mathcal{D}}}(A,B)$
, is the number of intersections of
$h_{{\mathcal{D}}}(A,B)$
, is the number of intersections of
 $\alpha$
with
$\alpha$
with
 ${\mathcal{D}}$
not including A and B, minimised over all shortcuts
${\mathcal{D}}$
not including A and B, minimised over all shortcuts
 $\alpha$
between A and B. An
$\alpha$
between A and B. An
 $\alpha$
attaining this minimum is a minimal shortcut. Given a generalised knotoid
$\alpha$
attaining this minimum is a minimal shortcut. Given a generalised knotoid
 $\kappa$
and poles
$\kappa$
and poles
 $A,B \in P(\kappa)$
, the height between A and B, denoted
$A,B \in P(\kappa)$
, the height between A and B, denoted
 $h_\kappa(A,B)$
, is the minimum of
$h_\kappa(A,B)$
, is the minimum of
 $h_{{\mathcal{D}}}(A,B)$
over all diagrams
$h_{{\mathcal{D}}}(A,B)$
over all diagrams
 ${\mathcal{D}}$
representing K. A diagram
${\mathcal{D}}$
representing K. A diagram
 $\mathcal D$
attaining this minimum realises the height between A and B. Given an ordering on the poles
$\mathcal D$
attaining this minimum realises the height between A and B. Given an ordering on the poles
 $P_1, \dots, P_n$
of
$P_1, \dots, P_n$
of
 $\kappa$
, the height spectrum of
$\kappa$
, the height spectrum of
 $\kappa$
is the symmetric matrix
$\kappa$
is the symmetric matrix
 $(h(P_i, P_j))_{ij}$
.
$(h(P_i, P_j))_{ij}$
.
Theorem 3·1 was conjectured by Turaev in [ Reference Turaev31 ] and proved by Gügümcü and Kauffman in [ Reference Gügümcü and Kauffman18 ].
Theorem 3·1 ([
Reference Gügümcü and Kauffman18
, Theorem 13]). Let k be a spherical knotoid with
 $h(k) = 0$
. Then any minimal-crossing diagram
$h(k) = 0$
. Then any minimal-crossing diagram
 $\mathcal D$
of k realises the height.
$\mathcal D$
of k realises the height.
The proof of theorem 3·1 given in [ Reference Goundaroulis, Gügümcü, Lambropoulou, Dorier, Stasiak and Kauffman15 ] considers the virtual closure of a knotoid and applies results from virtual knot theory derived from the method of parity projection [ Reference Manturov28 ]. In theorem 3·2, we extend theorem 3·1 to generalised knotoids. The proof of theorem 3·2 adapts a topological approach to parity via colourings described in [ Reference Boden and Rushworth9 ].
Theorem 3·2. Let
 $\kappa$
be a classical generalised knotoid and suppose poles
$\kappa$
be a classical generalised knotoid and suppose poles
 $A,B \in P(\kappa)$
satisfy
$A,B \in P(\kappa)$
satisfy
 $h_\kappa(A,B) = 0$
. Then any minimal-crossing diagram
$h_\kappa(A,B) = 0$
. Then any minimal-crossing diagram
 ${\mathcal{D}}$
of
${\mathcal{D}}$
of
 $\kappa$
realises the height between A and B.
$\kappa$
realises the height between A and B.
Proof. If
 $A = B$
, the result is trivial, so assume
$A = B$
, the result is trivial, so assume
 $A \neq B$
. Fix a diagram
$A \neq B$
. Fix a diagram
 ${\mathcal{D}}_0$
such that
${\mathcal{D}}_0$
such that
 $h_{{\mathcal{D}}_0}(A,B) = 0$
, and let
$h_{{\mathcal{D}}_0}(A,B) = 0$
, and let
 $\alpha$
be a minimal shortcut between A and B. Suppose for contradiction’s sake that there exists a minimal-crossing diagram
$\alpha$
be a minimal shortcut between A and B. Suppose for contradiction’s sake that there exists a minimal-crossing diagram
 ${\mathcal{D}}$
with
${\mathcal{D}}$
with
 $h_{{\mathcal{D}}}(A,B) > 0$
. We may assume that there is a sequence of diagrams
$h_{{\mathcal{D}}}(A,B) > 0$
. We may assume that there is a sequence of diagrams
 ${\mathcal{D}}_0 \to {\mathcal{D}}_1 \to \dots \to {\mathcal{D}}_n = {\mathcal{D}}$
where for each
${\mathcal{D}}_0 \to {\mathcal{D}}_1 \to \dots \to {\mathcal{D}}_n = {\mathcal{D}}$
where for each
 $0 \le i < n$
, the diagrams
$0 \le i < n$
, the diagrams
 ${\mathcal{D}}_i$
and
${\mathcal{D}}_i$
and
 ${\mathcal{D}}_{i+1}$
are related by a Reidemeister move. Recall that Reidemeister moves take place away from poles, so we may assume that each pole Q of
${\mathcal{D}}_{i+1}$
are related by a Reidemeister move. Recall that Reidemeister moves take place away from poles, so we may assume that each pole Q of
 ${\mathcal{D}}_0$
has a neighbourhood
${\mathcal{D}}_0$
has a neighbourhood
 $N_Q$
that is unchanged as the moves occur. We declare that the shortcut
$N_Q$
that is unchanged as the moves occur. We declare that the shortcut
 $\alpha$
is fixed across all the diagrams
$\alpha$
is fixed across all the diagrams
 ${\mathcal{D}}_i$
, and we may assume that
${\mathcal{D}}_i$
, and we may assume that
 $\alpha$
intersects each
$\alpha$
intersects each
 ${\mathcal{D}}_i$
transversely and away from crossings.
${\mathcal{D}}_i$
transversely and away from crossings.
Claim 3·3. The number of intersections of
 $\alpha$
with a constituent of
$\alpha$
with a constituent of
 ${\mathcal{D}}_i$
, excluding potential intersections at poles, is even.
${\mathcal{D}}_i$
, excluding potential intersections at poles, is even.
Proof. Let
 $e \in C(\kappa)$
be a constituent. For each
$e \in C(\kappa)$
be a constituent. For each
 $0 \le j < n$
, let
$0 \le j < n$
, let
 $\#(\alpha \cap e)_j$
denote the number of intersections of
$\#(\alpha \cap e)_j$
denote the number of intersections of
 $\alpha$
with e in the diagram
$\alpha$
with e in the diagram
 ${\mathcal{D}}_j$
, excluding poles. We show that
${\mathcal{D}}_j$
, excluding poles. We show that
 $\#(\alpha \cap e)_j$
and
$\#(\alpha \cap e)_j$
and
 $\#(\alpha \cap e)_{j+1}$
have the same parity, and the conclusion follows from the assumption that
$\#(\alpha \cap e)_{j+1}$
have the same parity, and the conclusion follows from the assumption that
 $\#(\alpha \cap e)_0 = 0$
.
$\#(\alpha \cap e)_0 = 0$
.
Let D be the disk region where the Reidemeister move
 ${\mathcal{D}}_j \to {\mathcal{D}}_{j+1}$
is applied. For each
${\mathcal{D}}_j \to {\mathcal{D}}_{j+1}$
is applied. For each
 $t \in \{1, 2, 3\}$
, a type t Reidemeister move has t participating strands
$t \in \{1, 2, 3\}$
, a type t Reidemeister move has t participating strands
 $s_1, \dots s_t$
, some of which may belong to e. Each
$s_1, \dots s_t$
, some of which may belong to e. Each
 $s_\ell$
meets
$s_\ell$
meets
 $\partial D$
at two endpoints that are fixed by the Reidemeister move.
$\partial D$
at two endpoints that are fixed by the Reidemeister move.
If
 $\alpha$
does not intersect D, then the conclusion is clear. Otherwise, we may assume that
$\alpha$
does not intersect D, then the conclusion is clear. Otherwise, we may assume that
 $\alpha$
meets
$\alpha$
meets
 $\partial D$
at a finite number of points
$\partial D$
at a finite number of points
 $P_1, P_2, \dots, P_k$
and
$P_1, P_2, \dots, P_k$
and
 $Q_1, Q_2, \dots, Q_k$
, distinct from the endpoints of the participating strands, such that each pair
$Q_1, Q_2, \dots, Q_k$
, distinct from the endpoints of the participating strands, such that each pair
 $P_m$
and
$P_m$
and
 $Q_m$
is connected by a non-self-intersecting arc
$Q_m$
is connected by a non-self-intersecting arc
 $\alpha_m \subset \alpha$
contained in the interior of D. Each
$\alpha_m \subset \alpha$
contained in the interior of D. Each
 $\alpha_m$
divides D into two regions, and
$\alpha_m$
divides D into two regions, and
 $\#(\alpha_m \cap s_\ell)_j$
is odd if the endpoints of
$\#(\alpha_m \cap s_\ell)_j$
is odd if the endpoints of
 $s_\ell$
are in opposite regions of D and even otherwise. Since the Reidemeister move fixes the endpoints, it follows that
$s_\ell$
are in opposite regions of D and even otherwise. Since the Reidemeister move fixes the endpoints, it follows that
 $\#(\alpha_m \cap s_\ell)_j$
and
$\#(\alpha_m \cap s_\ell)_j$
and
 $\#(\alpha_m \cap s_\ell)_{j+1}$
have the same parity for each m and
$\#(\alpha_m \cap s_\ell)_{j+1}$
have the same parity for each m and
 $\ell$
, and the conclusion follows. See Figure 4.
$\ell$
, and the conclusion follows. See Figure 4.
Given a constituent e in a diagram
 ${\mathcal{D}}_i$
, an
${\mathcal{D}}_i$
, an
 $\alpha$
-colouring of e is an assignment of black or gray to each point of e such that the colour of e changes precisely at the points where it intersects
$\alpha$
-colouring of e is an assignment of black or gray to each point of e such that the colour of e changes precisely at the points where it intersects
 $\alpha$
. It follows from Claim 3·3 that an
$\alpha$
. It follows from Claim 3·3 that an
 $\alpha$
-colouring exists for each e. We define an
$\alpha$
-colouring exists for each e. We define an
 $\alpha$
-colouring of the diagram
$\alpha$
-colouring of the diagram
 ${\mathcal{D}}_i$
to be a choice of
${\mathcal{D}}_i$
to be a choice of
 $\alpha$
-colouring for each of its constituents such that each segment constituent is black in a neighbourhood of its endpoint poles. We inductively fix an
$\alpha$
-colouring for each of its constituents such that each segment constituent is black in a neighbourhood of its endpoint poles. We inductively fix an
 $\alpha$
-colouring
$\alpha$
-colouring
 $\mathcal C_i$
for each
$\mathcal C_i$
for each
 ${\mathcal{D}}_i$
as follows. We declare
${\mathcal{D}}_i$
as follows. We declare
 $\mathcal C_0$
to be the
$\mathcal C_0$
to be the
 $\alpha$
-colouring in which all constituents of
$\alpha$
-colouring in which all constituents of
 ${\mathcal{D}}_0$
are coloured entirely black. Once
${\mathcal{D}}_0$
are coloured entirely black. Once
 $\mathcal C_i$
is chosen, the Reidemeister move
$\mathcal C_i$
is chosen, the Reidemeister move
 ${\mathcal{D}}_i \to {\mathcal{D}}_{i+1}$
uniquely determines
${\mathcal{D}}_i \to {\mathcal{D}}_{i+1}$
uniquely determines
 $\mathcal C_{i+1}$
if we require
$\mathcal C_{i+1}$
if we require
 $\mathcal C_i$
and
$\mathcal C_i$
and
 $\mathcal C_{i+1}$
to agree outside the disk region where the Reidemeister move is applied. See Figure 5. Under the
$\mathcal C_{i+1}$
to agree outside the disk region where the Reidemeister move is applied. See Figure 5. Under the
 $\alpha$
-colouring
$\alpha$
-colouring
 $\mathcal C_i$
, a crossing c in
$\mathcal C_i$
, a crossing c in
 ${\mathcal{D}}_i$
is assigned a colour from each of the constituents meeting at c. We say c is even if these colours agree and odd if they differ.
${\mathcal{D}}_i$
is assigned a colour from each of the constituents meeting at c. We say c is even if these colours agree and odd if they differ.

Fig. 4. A Reidemeister move occuring in the disk region D, whose boundary is indicated by dashed line. The shortcut
 $\alpha$
is indicated with dotted line. The parity of the number of intersections of
$\alpha$
is indicated with dotted line. The parity of the number of intersections of
 $\alpha$
with each participating strand is preserved.
$\alpha$
with each participating strand is preserved.

Fig. 5. Figures 5(a), 5(b), 5(c) show an example sequence of diagrams
 ${\mathcal{D}}_0$
,
${\mathcal{D}}_0$
,
 ${\mathcal{D}}_1$
,
${\mathcal{D}}_1$
,
 ${\mathcal{D}}_2$
equipped with their
${\mathcal{D}}_2$
equipped with their
 $\alpha$
-colourings. The shortcut
$\alpha$
-colourings. The shortcut
 $\alpha$
is indicated with dotted line.
$\alpha$
is indicated with dotted line.
Our next aim is to show that the diagram
 ${\mathcal{D}} = {\mathcal{D}}_n$
has at least one odd crossing. To do this, we introduce some notation.
${\mathcal{D}} = {\mathcal{D}}_n$
has at least one odd crossing. To do this, we introduce some notation.
Define a region (sometimes also called a complementary region) to be a connected component of the complement
 $S^2 \setminus {\mathcal{D}}$
. Observe that a region need not be an open disk, and its boundary need not be connected. For a given region R, define
$S^2 \setminus {\mathcal{D}}$
. Observe that a region need not be an open disk, and its boundary need not be connected. For a given region R, define
 $\partial_0 R$
to be the subset of
$\partial_0 R$
to be the subset of
 $\partial R \subset {\mathcal{D}}$
consisting of points x such that every neighbourhood of x intersects at least two distinct regions. In particular, the shortcut
$\partial R \subset {\mathcal{D}}$
consisting of points x such that every neighbourhood of x intersects at least two distinct regions. In particular, the shortcut
 $\alpha$
intersects
$\alpha$
intersects
 $\partial_0 R$
each time it enters or exits a region R. Conversely, each intersection of
$\partial_0 R$
each time it enters or exits a region R. Conversely, each intersection of
 $\alpha$
with
$\alpha$
with
 $\partial_0 R$
corresponds to an entering or exiting of R.
$\partial_0 R$
corresponds to an entering or exiting of R.
Define a looped graph to be the disjoint union of a finite graph with a collection of circles. A looped graph is Eulerian if the edges of its graph portion can be partitioned into cycles (i.e. closed paths). It is a classical result that a looped graph is Eulerian if and only if all of its vertices have even valency.
We use the term singularity to refer to a pole or crossing of
 ${\mathcal{D}}$
. We use the term border to refer to a portion of a constituent e that connects consecutive singularities along e, or all of e if e is a loop constituent with no singularities. Every singularity s has a disk neighbourhood
${\mathcal{D}}$
. We use the term border to refer to a portion of a constituent e that connects consecutive singularities along e, or all of e if e is a loop constituent with no singularities. Every singularity s has a disk neighbourhood
 $N_s$
that contains no other singularities. In particular,
$N_s$
that contains no other singularities. In particular,
 ${\mathcal{D}}$
meets
${\mathcal{D}}$
meets
 $N_s$
at m radii of
$N_s$
at m radii of
 $N_s$
, where m is the number of borders meeting at s.
$N_s$
, where m is the number of borders meeting at s.
Claim 3·4. The set
 $\partial_0R$
forms an Eulerian looped graph whose vertices are singularities and whose edges and circles are borders.
$\partial_0R$
forms an Eulerian looped graph whose vertices are singularities and whose edges and circles are borders.
Proof. First note that if any point of a border is in
 $\partial_0R$
, then the entire border (including singularities at its endpoints) is contained in
$\partial_0R$
, then the entire border (including singularities at its endpoints) is contained in
 $\partial_0R$
. It now suffices to show that each singularity
$\partial_0R$
. It now suffices to show that each singularity
 $s \in \partial_0R$
has even valency. Consider
$s \in \partial_0R$
has even valency. Consider
 $N_s$
and m as defined above. The diagram
$N_s$
and m as defined above. The diagram
 ${\mathcal{D}}$
divides
${\mathcal{D}}$
divides
 $N_s$
into m connected components belonging to (not necessarily distinct) regions
$N_s$
into m connected components belonging to (not necessarily distinct) regions
 $R_1, \dots, R_m$
, some of which are equal to R. The radii belonging to
$R_1, \dots, R_m$
, some of which are equal to R. The radii belonging to
 $\partial_0R$
are those that separate an R-region and a non-R-region. There are an even number of such radii, and the conclusion follows.
$\partial_0R$
are those that separate an R-region and a non-R-region. There are an even number of such radii, and the conclusion follows.
Claim 3·5. The diagram
 ${\mathcal{D}} = {\mathcal{D}}_n$
has at least one odd crossing.
${\mathcal{D}} = {\mathcal{D}}_n$
has at least one odd crossing.
Proof. For sufficiently small choices of neighbourhoods
 $N_A$
and
$N_A$
and
 $N_B$
, there is a unique starting region
$N_B$
, there is a unique starting region
 $R_A$
satisfying
$R_A$
satisfying
 $N_A \cap \alpha \setminus \{A\} \subset R_A$
. See Figure 6(a). Similarly, there is a unique ending region
$N_A \cap \alpha \setminus \{A\} \subset R_A$
. See Figure 6(a). Similarly, there is a unique ending region
 $R_B$
satisfying
$R_B$
satisfying
 $N_B \cap \alpha \setminus \{B\} \subset R_B$
. By Claim 3·4, we may view
$N_B \cap \alpha \setminus \{B\} \subset R_B$
. By Claim 3·4, we may view
 $\partial_0R_A$
as an Eulerian looped graph and partition its edges into cycles. By the assumption that
$\partial_0R_A$
as an Eulerian looped graph and partition its edges into cycles. By the assumption that
 $h_{\mathcal{D}}(A,B) \neq 0$
, we have
$h_{\mathcal{D}}(A,B) \neq 0$
, we have
 $R_A \neq R_B$
. Thus,
$R_A \neq R_B$
. Thus,
 $\alpha$
intersects
$\alpha$
intersects
 $\partial_0 R_A$
an odd number of times, and it follows that
$\partial_0 R_A$
an odd number of times, and it follows that
 $\alpha$
intersects some cycle or circle
$\alpha$
intersects some cycle or circle
 $C \subset \partial_0R_A$
an odd number times.
$C \subset \partial_0R_A$
an odd number times.
Consider the
 $\alpha$
-colouring of
$\alpha$
-colouring of
 ${\mathcal{D}}$
restricted to C. Recall that constituents must be black near poles, so C does not change colour at poles. Thus, each point of C at which its colour changes falls into one of two categories:
${\mathcal{D}}$
restricted to C. Recall that constituents must be black near poles, so C does not change colour at poles. Thus, each point of C at which its colour changes falls into one of two categories:
-
(i) an intersection of
 $C \setminus \{A, B\}$
with
$\alpha$
. (Every such intersection yields a colour change.)
$C \setminus \{A, B\}$
with
$\alpha$
. (Every such intersection yields a colour change.) -
(ii) a point of C at which
${\mathcal{D}}$
has an odd crossing.



As we make a full traversal around C, the colour changes an even number of times. An odd number of colour changes fall under (i), so an odd number of colour changes fall under (ii). In particular,
 ${\mathcal{D}}$
has at least one odd crossing.
${\mathcal{D}}$
has at least one odd crossing.
Fix a double branched cover
 $p \colon S^2 \to S^2$
branched over
$p \colon S^2 \to S^2$
branched over
 $\alpha$
. Let
$\alpha$
. Let
 $e \in C({\mathcal{D}}_i)$
be a constituent. (If e has an endpoint at A or B, replace e by
$e \in C({\mathcal{D}}_i)$
be a constituent. (If e has an endpoint at A or B, replace e by
 $e \setminus \{A, B\}$
.) The preimage
$e \setminus \{A, B\}$
.) The preimage
 $p^{-1}(e)$
has two connected components e ′, e ′′, each homeomorphic to e. The preimage
$p^{-1}(e)$
has two connected components e ′, e ′′, each homeomorphic to e. The preimage
 $p^{-1}({\mathcal{D}}_i)$
defines a generalised knotoid diagram on the double cover sphere with poles at the points of
$p^{-1}({\mathcal{D}}_i)$
defines a generalised knotoid diagram on the double cover sphere with poles at the points of
 $p^{-1}(P({\mathcal{D}}_i))$
and constituents e ′, e” for each
$p^{-1}(P({\mathcal{D}}_i))$
and constituents e ′, e” for each
 $e \in C({\mathcal{D}}_i)$
. Its over/under crossing data is inherited from
$e \in C({\mathcal{D}}_i)$
. Its over/under crossing data is inherited from
 ${\mathcal{D}}_i$
in the natural way.
${\mathcal{D}}_i$
in the natural way.

Fig. 6. The diagram from Figure 5(c). Assuming A is the left endpoint pole of the shortcut
 $\alpha$
, Figure 6(a) shows the starting region
$\alpha$
, Figure 6(a) shows the starting region
 $R_A$
, shaded. Figure 6(b) shows
$R_A$
, shaded. Figure 6(b) shows
 $\partial_0R_A$
. Note that one of the colour changes on the outer cycle of
$\partial_0R_A$
. Note that one of the colour changes on the outer cycle of
 $\partial_0R_A$
occurs at an odd crossing.
$\partial_0R_A$
occurs at an odd crossing.

Fig. 7. One possible visualisation of the branched double cover. On the left is
 $H_1$
, on the right is
$H_1$
, on the right is
 $H_2$
, and they are glued together along their boundaries (the dotted circles obtained by cutting a sphere along
$H_2$
, and they are glued together along their boundaries (the dotted circles obtained by cutting a sphere along
 $\alpha$
) such that the top and bottom arcs on the left are identified with the bottom and top arcs on the right. The preimage
$\alpha$
) such that the top and bottom arcs on the left are identified with the bottom and top arcs on the right. The preimage
 $p^{-1}({\mathcal{D}})$
and its induced
$p^{-1}({\mathcal{D}})$
and its induced
 $\alpha$
-colouring are shown for the diagram
$\alpha$
-colouring are shown for the diagram
 ${\mathcal{D}}$
from Figure 5(c).
${\mathcal{D}}$
from Figure 5(c).
The preimage
 $p^{-1}(\alpha)$
is a circle, and
$p^{-1}(\alpha)$
is a circle, and
 $S^2 \setminus p^{-1}(\alpha)$
is the disjoint union of two open disks
$S^2 \setminus p^{-1}(\alpha)$
is the disjoint union of two open disks
 $H_1$
and
$H_1$
and
 $H_2$
. Let
$H_2$
. Let
 $p_1 \colon H_1 \to S^2 \setminus \alpha$
and
$p_1 \colon H_1 \to S^2 \setminus \alpha$
and
 $p_2 \colon H_2 \to S^2 \setminus \alpha$
be the restrictions of p to
$p_2 \colon H_2 \to S^2 \setminus \alpha$
be the restrictions of p to
 $H_1$
and
$H_1$
and
 $H_2$
. Note that
$H_2$
. Note that
 $p_1$
and
$p_1$
and
 $p_2$
induce bijections
$p_2$
induce bijections
 $p_1 \colon p^{-1}(e) \cap H_1 \to e$
and
$p_1 \colon p^{-1}(e) \cap H_1 \to e$
and
 $p_2 \colon p^{-1}(e) \cap H_2 \to e$
, and recall that e has an
$p_2 \colon p^{-1}(e) \cap H_2 \to e$
, and recall that e has an
 $\alpha$
-colouring dictated by
$\alpha$
-colouring dictated by
 $\mathcal C_i$
. We colour each point of
$\mathcal C_i$
. We colour each point of
 $p^{-1}(e)$
such that the bijections induced by
$p^{-1}(e)$
such that the bijections induced by
 $p_1$
and
$p_1$
and
 $p_2$
are colour-preserving and colour-reversing, respectively. Doing so for each
$p_2$
are colour-preserving and colour-reversing, respectively. Doing so for each
 $e \in C({\mathcal{D}}_i)$
yields the induced
$e \in C({\mathcal{D}}_i)$
yields the induced
 $\alpha$
-colouring of
$\alpha$
-colouring of
 $p^{-1}({\mathcal{D}}_i)$
. See Figure 7. Using the induced
$p^{-1}({\mathcal{D}}_i)$
. See Figure 7. Using the induced
 $\alpha$
-colourings of the preimages
$\alpha$
-colourings of the preimages
 $p^{-1}(e)$
, we define even (resp. odd) crossings of
$p^{-1}(e)$
, we define even (resp. odd) crossings of
 $p^{-1}({\mathcal{D}}_i)$
as crossings where the colours agree (resp. differ). Observe that p defines a parity-preserving, 2-to-1 map from the crossings of
$p^{-1}({\mathcal{D}}_i)$
as crossings where the colours agree (resp. differ). Observe that p defines a parity-preserving, 2-to-1 map from the crossings of
 $p^{-1}({\mathcal{D}}_i)$
to the crossings of
$p^{-1}({\mathcal{D}}_i)$
to the crossings of
 ${\mathcal{D}}_i$
.
${\mathcal{D}}_i$
.
Claim 3·6. Under the induced
 $\alpha$
-colouring of
$\alpha$
-colouring of
 $p^{-1}({\mathcal{D}}_i)$
, one of e’ and e” is entirely black and the other is entirely gray. Moreover, if e has an endpoint at a pole
$p^{-1}({\mathcal{D}}_i)$
, one of e’ and e” is entirely black and the other is entirely gray. Moreover, if e has an endpoint at a pole
 $Q \not \in \{A,B\}$
, then the black component of
$Q \not \in \{A,B\}$
, then the black component of
 $p^{-1}(e)$
has a corresponding endpoint at
$p^{-1}(e)$
has a corresponding endpoint at
 $p_1^{-1}(Q) \in H_1$
.
$p_1^{-1}(Q) \in H_1$
.
Proof. It is clear from the definition of the induced
 $\alpha$
-colouring that
$\alpha$
-colouring that
 $p^{-1}(e)$
has both black and gray points. Each time e crosses
$p^{-1}(e)$
has both black and gray points. Each time e crosses
 $\alpha$
and changes colour, the lift
$\alpha$
and changes colour, the lift
 $e_1$
crosses from
$e_1$
crosses from
 $H_1$
to
$H_1$
to
 $H_2$
or vice versa. Since
$H_2$
or vice versa. Since
 $p_1$
is colour-preserving and
$p_1$
is colour-preserving and
 $p_2$
is colour-reversing,
$p_2$
is colour-reversing,
 $e_1$
does not change colour. It follows that
$e_1$
does not change colour. It follows that
 $e_1$
is monochromatic. Similarly,
$e_1$
is monochromatic. Similarly,
 $e_2$
is monochromatic. This proves the first statement.
$e_2$
is monochromatic. This proves the first statement.
Now suppose e has an endpoint at a pole
 $Q \not \in \{A, B\}$
. By definition of
$Q \not \in \{A, B\}$
. By definition of
 $\alpha$
-colouring, there is a neighbourhood
$\alpha$
-colouring, there is a neighbourhood
 $N_Q$
of Q such that
$N_Q$
of Q such that
 $\mathcal C_i$
assigns black to
$\mathcal C_i$
assigns black to
 $e \cap N_Q$
. Since
$e \cap N_Q$
. Since
 $p_1$
is colour-preserving, there is a neighbourhood of
$p_1$
is colour-preserving, there is a neighbourhood of
 $p_1^{-1}(Q)$
in which
$p_1^{-1}(Q)$
in which
 $p^{-1}(e)$
is black. This proves the second statement.
$p^{-1}(e)$
is black. This proves the second statement.
In light of Claim 3·6, we let e ′ denote the component of
 $p^{-1}(e)$
coloured black and define a generalised knotoid diagram
$p^{-1}(e)$
coloured black and define a generalised knotoid diagram
 ${\mathcal{D}'}_{\!\!i} \subset p^{-1}({\mathcal{D}}_i)$
as follows. The diagram
${\mathcal{D}'}_{\!\!i} \subset p^{-1}({\mathcal{D}}_i)$
as follows. The diagram
 ${\mathcal{D}'}_{\!\!i}$
has poles at
${\mathcal{D}'}_{\!\!i}$
has poles at
 $p^{-1}(A)$
,
$p^{-1}(A)$
,
 $p^{-1}(B)$
, and
$p^{-1}(B)$
, and
 $p_1^{-1}(Q) \in H_1$
for each
$p_1^{-1}(Q) \in H_1$
for each
 $Q \in P({\mathcal{D}}_i) \setminus \{A,B\}$
, and it has the constituent e ′ for each
$Q \in P({\mathcal{D}}_i) \setminus \{A,B\}$
, and it has the constituent e ′ for each
 $e \in C({\mathcal{D}}_i)$
. Its over/under crossing data is inherited from
$e \in C({\mathcal{D}}_i)$
. Its over/under crossing data is inherited from
 ${\mathcal{D}}_i$
in the natural way. The black portions of Figure 7 show
${\mathcal{D}}_i$
in the natural way. The black portions of Figure 7 show
 ${\mathcal{D}}'$
, where
${\mathcal{D}}'$
, where
 ${\mathcal{D}} = {\mathcal{D}}_2$
is the diagram from Figure 5(c).
${\mathcal{D}} = {\mathcal{D}}_2$
is the diagram from Figure 5(c).
Claim 3·7. The crossings of
 ${\mathcal{D}'}_{\!\!i}$
are in bijection with the even crossings of
${\mathcal{D}'}_{\!\!i}$
are in bijection with the even crossings of
 ${\mathcal{D}}_i$
.
${\mathcal{D}}_i$
.
Proof. Recall that, as a map from the crossings of
 $p^{-1}({\mathcal{D}}_i)$
to the crossings of
$p^{-1}({\mathcal{D}}_i)$
to the crossings of
 ${\mathcal{D}}_i$
, the map p preserves parity. Each crossing c ′ of
${\mathcal{D}}_i$
, the map p preserves parity. Each crossing c ′ of
 ${\mathcal{D}'}_{\!\!i}$
is even (black-black), so p(c ′) is an even crossing of
${\mathcal{D}'}_{\!\!i}$
is even (black-black), so p(c ′) is an even crossing of
 ${\mathcal{D}}_i$
. Thus p defines map from the crossings of
${\mathcal{D}}_i$
. Thus p defines map from the crossings of
 ${\mathcal{D}'}_{\!\!i}$
to the even crossings of
${\mathcal{D}'}_{\!\!i}$
to the even crossings of
 ${\mathcal{D}}_i$
. For any even crossing c in
${\mathcal{D}}_i$
. For any even crossing c in
 ${\mathcal{D}}_i$
, the preimage
${\mathcal{D}}_i$
, the preimage
 $p^{-1}(c) = \{p_1^{-1}(c), p_2^{-1}(c)\}$
consists of two crossings, one black-black and one gray-gray. Only the black-black crossing is a crossing of
$p^{-1}(c) = \{p_1^{-1}(c), p_2^{-1}(c)\}$
consists of two crossings, one black-black and one gray-gray. Only the black-black crossing is a crossing of
 ${\mathcal{D}'}_{\!\!i}$
. It follows that p gives the desired bijection.
${\mathcal{D}'}_{\!\!i}$
. It follows that p gives the desired bijection.
Let
 $\sim$
denote the equivalence generated by ambient isotopies and Reidemeister moves.
$\sim$
denote the equivalence generated by ambient isotopies and Reidemeister moves.

Fig. 8. A Reidemeister move
 ${\mathcal{D}}_i \to {\mathcal{D}}_{i+1}$
(Figure 8(a)) lifts to a move
${\mathcal{D}}_i \to {\mathcal{D}}_{i+1}$
(Figure 8(a)) lifts to a move
 $p^{-1}({\mathcal{D}}_i) \to p^{-1}({\mathcal{D}}_{i+1})$
in two disk regions (Figure 8(b)). Restricting to only the black strands in Figure 8(b) yields a move
$p^{-1}({\mathcal{D}}_i) \to p^{-1}({\mathcal{D}}_{i+1})$
in two disk regions (Figure 8(b)). Restricting to only the black strands in Figure 8(b) yields a move
 ${\mathcal{D}'}_{\!\!i} \to {\mathcal{D}'}_{\!\!i+1}$
. In this example it is an ambient isotopy.
${\mathcal{D}'}_{\!\!i} \to {\mathcal{D}'}_{\!\!i+1}$
. In this example it is an ambient isotopy.
Claim 3·8. For each
 $0 \le i < n$
, we have
$0 \le i < n$
, we have
 ${\mathcal{D}'}_{\!\!i} \sim {\mathcal{D}'}_{\!\!i+1}$
.
${\mathcal{D}'}_{\!\!i} \sim {\mathcal{D}'}_{\!\!i+1}$
.
Proof. Let D be the disk region where the type t Reidemeister move
 ${\mathcal{D}}_i \to {\mathcal{D}}_{i+1}$
is applied and let
${\mathcal{D}}_i \to {\mathcal{D}}_{i+1}$
is applied and let
 $s_1, \dots, s_t$
be the participating strands, with endpoints on
$s_1, \dots, s_t$
be the participating strands, with endpoints on
 $\partial D$
, as in the proof of Claim 3·3. The preimage
$\partial D$
, as in the proof of Claim 3·3. The preimage
 $p^{-1}(D)$
is the disjoint union of two disk regions
$p^{-1}(D)$
is the disjoint union of two disk regions
 $D_1$
and
$D_1$
and
 $D_2$
, and the move
$D_2$
, and the move
 ${\mathcal{D}}_i \to {\mathcal{D}}_{i+1}$
lifts to a move
${\mathcal{D}}_i \to {\mathcal{D}}_{i+1}$
lifts to a move
 $p^{-1}({\mathcal{D}}_i) \to p^{-1}({\mathcal{D}}_{i+1})$
given by a type t Reidemeister move in each of
$p^{-1}({\mathcal{D}}_i) \to p^{-1}({\mathcal{D}}_{i+1})$
given by a type t Reidemeister move in each of
 $D_1$
and
$D_1$
and
 $D_2$
. By Claim 3·6, each participating strand
$D_2$
. By Claim 3·6, each participating strand
 $s_\ell$
lifts to a monochromatic strand
$s_\ell$
lifts to a monochromatic strand
 $s_{\ell, 1} \subset D_1$
and a monochromatic strand
$s_{\ell, 1} \subset D_1$
and a monochromatic strand
 $s_{\ell, 2} \subset D_2$
(of the opposite colour). Since
$s_{\ell, 2} \subset D_2$
(of the opposite colour). Since
 ${\mathcal{D}}_i \to {\mathcal{D}}_{i+1}$
preserves the colours of the endpoints, the move
${\mathcal{D}}_i \to {\mathcal{D}}_{i+1}$
preserves the colours of the endpoints, the move
 $p^{-1}({\mathcal{D}}_i) \to p^{-1}({\mathcal{D}}_{i+1})$
also preserves the colours of the endpoints and thus preserves the colours of
$p^{-1}({\mathcal{D}}_i) \to p^{-1}({\mathcal{D}}_{i+1})$
also preserves the colours of the endpoints and thus preserves the colours of
 $s_{\ell, 1}$
and
$s_{\ell, 1}$
and
 $s_{\ell, 2}$
. It follows that restricting the move
$s_{\ell, 2}$
. It follows that restricting the move
 $p^{-1}({\mathcal{D}}_i) \to p^{-1}({\mathcal{D}}_{i+1})$
to only the black participating strands yields either a Reidemeister move or an ambient isotopy that takes
$p^{-1}({\mathcal{D}}_i) \to p^{-1}({\mathcal{D}}_{i+1})$
to only the black participating strands yields either a Reidemeister move or an ambient isotopy that takes
 ${\mathcal{D}'}_{\!\!i}$
to
${\mathcal{D}'}_{\!\!i}$
to
 ${\mathcal{D}'}_{\!\!i+1}$
. See Figure 8.
${\mathcal{D}'}_{\!\!i+1}$
. See Figure 8.
We finish the proof of Theorem 3·2. Since
 $D_0$
does not intersect
$D_0$
does not intersect
 $\alpha$
except at A and B, it follows by construction that
$\alpha$
except at A and B, it follows by construction that
 ${\mathcal{D}}_0^{\prime}$
is contained in
${\mathcal{D}}_0^{\prime}$
is contained in
 $H_1 \cup \{p^{-1}(A), p^{-1}(B)\}$
, and that
$H_1 \cup \{p^{-1}(A), p^{-1}(B)\}$
, and that
 ${\mathcal{D}}_0$
and
${\mathcal{D}}_0$
and
 ${\mathcal{D}}_0^{\prime}$
are ambiently isotopic diagrams of
${\mathcal{D}}_0^{\prime}$
are ambiently isotopic diagrams of
 $\kappa$
. See Figure 9. We now have
$\kappa$
. See Figure 9. We now have
 \[{\mathcal{D}}_n \sim {\mathcal{D}}_0 \sim {\mathcal{D}}_0^{\prime} \sim {\mathcal{D}}_n^{\prime},\]
\[{\mathcal{D}}_n \sim {\mathcal{D}}_0 \sim {\mathcal{D}}_0^{\prime} \sim {\mathcal{D}}_n^{\prime},\]
where the last equivalence follows from Claim 3·8. Hence
 ${\mathcal{D}}_n$
and
${\mathcal{D}}_n$
and
 ${\mathcal{D}}_n^{\prime}$
are both diagrams of
${\mathcal{D}}_n^{\prime}$
are both diagrams of
 $\kappa$
. However, Claim 3·5 and Claim 3·7 together imply that
$\kappa$
. However, Claim 3·5 and Claim 3·7 together imply that
 ${\mathcal{D}}_n^{\prime}$
has fewer crossings than
${\mathcal{D}}_n^{\prime}$
has fewer crossings than
 ${\mathcal{D}}_n$
. This contradicts the assumption that
${\mathcal{D}}_n$
. This contradicts the assumption that
 ${\mathcal{D}}_n$
is a minimal-crossing diagram of
${\mathcal{D}}_n$
is a minimal-crossing diagram of
 $\kappa$
.
$\kappa$
.
We conclude this section with some open questions.

Fig. 9. The diagram
 ${\mathcal{D}}_0^{\prime}$
for the diagram
${\mathcal{D}}_0^{\prime}$
for the diagram
 ${\mathcal{D}}_0$
from Figure 5(a), shown in the same schematic as Figure 7. The diagrams
${\mathcal{D}}_0$
from Figure 5(a), shown in the same schematic as Figure 7. The diagrams
 ${\mathcal{D}}_0$
and
${\mathcal{D}}_0$
and
 ${\mathcal{D}}_0^{\prime}$
are ambiently isotopic.
${\mathcal{D}}_0^{\prime}$
are ambiently isotopic.
Question 3·9. Does every generalised knotoid
 $\kappa$
have a diagram
$\kappa$
have a diagram
 ${\mathcal{D}}$
that simultaneously realises the height between every pair of poles of
${\mathcal{D}}$
that simultaneously realises the height between every pair of poles of
 $\kappa$
?
$\kappa$
?
As a corollary to Theorem 3·2, we obtain an affirmative answer to Question 3·9 in the case that the height spectrum of
 $\kappa$
is the zero matrix: we may take
$\kappa$
is the zero matrix: we may take
 ${\mathcal{D}}$
to be a minimal-crossing diagram of
${\mathcal{D}}$
to be a minimal-crossing diagram of
 $\kappa$
.
$\kappa$
.
Question 3·10. Let
 $\kappa$
be a generalised knotoid and let
$\kappa$
be a generalised knotoid and let
 $A,B \in P(\kappa)$
be poles. Does every minimal-crossing diagram of
$A,B \in P(\kappa)$
be poles. Does every minimal-crossing diagram of
 $\kappa$
realise the height between A and B?
$\kappa$
realise the height between A and B?
Question 3·10 asks a generalisation of Theorem 3·2 from height 0 to arbitrary heights, and an affirmative answer to Question 3·10 implies an affirmative answer to Question 3·9.
Question 3·11. Does Theorem 3·2 generalise to non-classical generalised knotoids (for example, generalised knotoids on a genus g surface)?
The proof we have given for Theorem 3·2 does not immediately generalise to higher genus surfaces because it uses the fact that there is a double branched cover of the sphere by itself. Generalising this method may require rephrasing the argument in terms of a “virtual theory” for generalised knotoids.

Fig. 10. Positive and negative crossing, respectively.
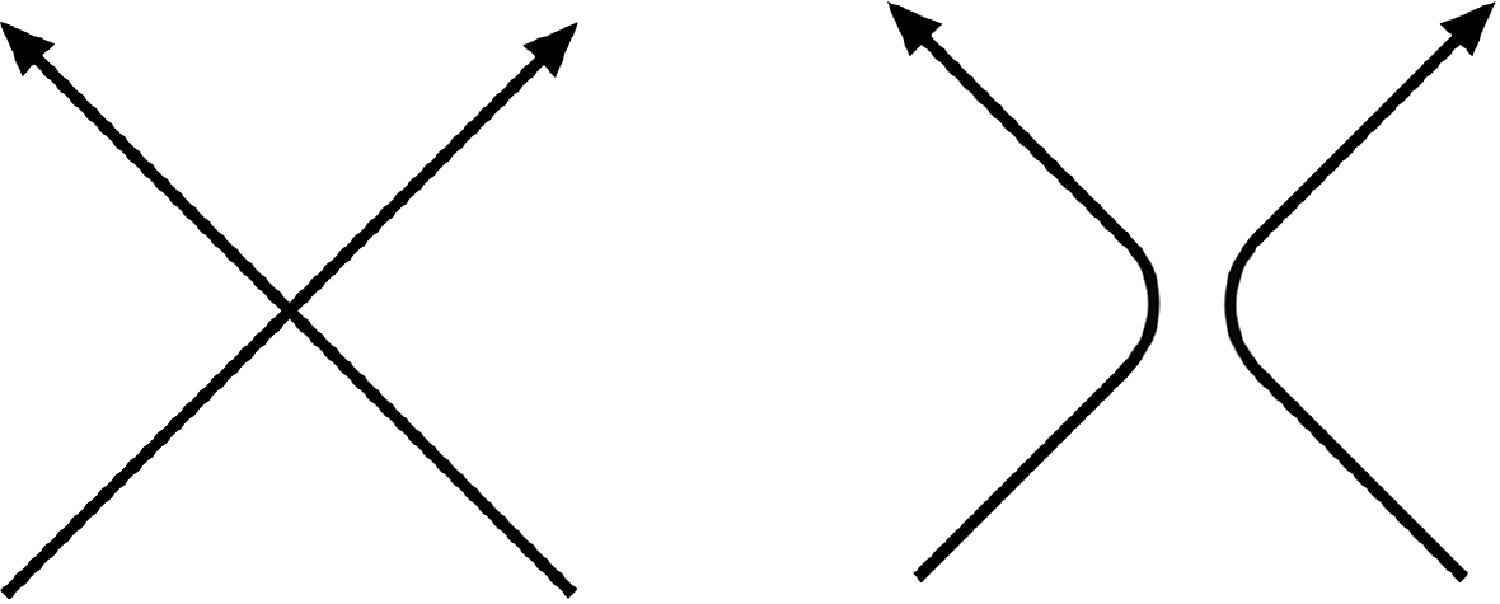
Fig. 11. A crossing and its oriented smoothing. The smoothing does not depend on over/under data.
Question 3·12. Which matrices of integers are realised as the height spectrum of a generalised knotoid?
4. Index polynomials for generalised knotoids
4·1. Notation
Given a crossing c in an oriented diagram, we let
 $\mathrm{sgn}(c) \in \{1, -1\}$
denote the sign of the crossing. See Figure 10. The oriented smoothing at c is the smoothing that respects the orientation of the incoming and outgoing strands. See Figure 11. Given a diagram
$\mathrm{sgn}(c) \in \{1, -1\}$
denote the sign of the crossing. See Figure 10. The oriented smoothing at c is the smoothing that respects the orientation of the incoming and outgoing strands. See Figure 11. Given a diagram
 ${\mathcal{D}}$
and two constituents
${\mathcal{D}}$
and two constituents
 $\alpha, \beta \in C({\mathcal{D}})$
, we define their linking number by the half-integer
$\alpha, \beta \in C({\mathcal{D}})$
, we define their linking number by the half-integer
 \[\mathrm{lk}(\alpha, \beta) = \frac 12\sum_c \mathrm{sgn}(c),\]
\[\mathrm{lk}(\alpha, \beta) = \frac 12\sum_c \mathrm{sgn}(c),\]
where the sum is taken over all crossings between
 $\alpha$
and
$\alpha$
and
 $\beta$
. Observe that the linking number between
$\beta$
. Observe that the linking number between
 $\alpha$
and
$\alpha$
and
 $\beta$
is an invariant of the generalised knotoid represented by
$\beta$
is an invariant of the generalised knotoid represented by
 ${\mathcal{D}}$
.
${\mathcal{D}}$
.
Given two (possibly identical) oriented generalised knotoid diagrams
 ${\mathcal{D}}_1, {\mathcal{D}}_2$
considered on the same surface
${\mathcal{D}}_1, {\mathcal{D}}_2$
considered on the same surface
 $\Sigma$
and constituents
$\Sigma$
and constituents
 $\alpha \in C({\mathcal{D}}_1)$
and
$\alpha \in C({\mathcal{D}}_1)$
and
 $\beta \in C({\mathcal{D}}_2)$
, let
$\beta \in C({\mathcal{D}}_2)$
, let
 $T(\alpha, \beta)$
denote the finite subset of
$T(\alpha, \beta)$
denote the finite subset of
 $\alpha \cap \beta$
consisting of transverse intersections between
$\alpha \cap \beta$
consisting of transverse intersections between
 $\alpha$
and
$\alpha$
and
 $\beta$
, excluding potential intersections at poles. At each
$\beta$
, excluding potential intersections at poles. At each
 $c \in T(\alpha, \beta)$
, the tangent vectors
$c \in T(\alpha, \beta)$
, the tangent vectors
 $v_\alpha, v_\beta$
of
$v_\alpha, v_\beta$
of
 $\alpha$
and
$\alpha$
and
 $\beta$
form a basis for the tangent space of
$\beta$
form a basis for the tangent space of
 $\Sigma$
at c. We set
$\Sigma$
at c. We set
 $\varepsilon(c) = 1$
if
$\varepsilon(c) = 1$
if
 $(v_\beta, v_\alpha)$
is a positively oriented basis, and
$(v_\beta, v_\alpha)$
is a positively oriented basis, and
 $\varepsilon(c) = -1$
otherwise. (Equivalently,
$\varepsilon(c) = -1$
otherwise. (Equivalently,
 $\varepsilon(c)$
gives the sign of c if
$\varepsilon(c)$
gives the sign of c if
 $\beta$
is taken to be the over-strand.) The algebraic intersection number of
$\beta$
is taken to be the over-strand.) The algebraic intersection number of
 $\alpha$
and
$\alpha$
and
 $\beta$
, denoted
$\beta$
, denoted
 $\alpha \cdot \beta$
, is defined as
$\alpha \cdot \beta$
, is defined as
 \[\alpha \cdot \beta = \sum_{c \in T(\alpha, \beta)} \varepsilon(c).\]
\[\alpha \cdot \beta = \sum_{c \in T(\alpha, \beta)} \varepsilon(c).\]
The algebraic intersection number does not require over/under data. The sign convention we have adopted matches the convention of the algebraic intersection number defined in [ Reference Turaev31 ].
Proposition 4·1 and Corollary 4·2 are well known.
Proposition 4·1. If
 $\alpha$
and
$\alpha$
and
 $\beta$
are loop constituents on
$\beta$
are loop constituents on
 $S^2$
such that all intersections in
$S^2$
such that all intersections in
 $\alpha \cap \beta$
are transverse and away from crossings, then
$\alpha \cap \beta$
are transverse and away from crossings, then
 $\alpha \cdot \beta = 0$
.
$\alpha \cdot \beta = 0$
.
Corollary 4·2. Let
 $\beta$
be a loop constituent on
$\beta$
be a loop constituent on
 $S^2$
and fix two points A, B in
$S^2$
and fix two points A, B in
 $S^2 \setminus \beta$
. Let
$S^2 \setminus \beta$
. Let
 $\alpha$
be a segment constituent between A and B intersecting
$\alpha$
be a segment constituent between A and B intersecting
 $\beta$
transversely and away from crossings. Then
$\beta$
transversely and away from crossings. Then
 $\alpha \cdot \beta$
does not depend on the choice of
$\alpha \cdot \beta$
does not depend on the choice of
 $\alpha$
.
$\alpha$
.
The index polynomial is an invariant for virtual knots introduced by Turaev in [ Reference Turaev30 ] and Henrich in [ Reference Henrich21 ]. A similar affine index polynomial for oriented virtual knots was defined by Kauffman in [ Reference Kauffman23 ] and extended to knotoids in [ Reference Gügümcü and Kauffman17 ]. Kim, Im, and Lee defined an index polynomial for knotoids in [ Reference Kim, Im and Lee24 ] that is distinct from the affine index polynomial.
These polynomial invariants are based on the following idea: consider a classical crossing c in a diagram of a knotoid or virtual knot and apply an oriented smoothing at c. The smoothing produces a diagram with two constituents
 $\alpha_c, \beta_c$
. In the case of a virtual knot, the smoothed diagram is a two-component virtual link, and in the case of a knotoid, it is a loop constituent and a segment constituent. An intersection index, denoted
$\alpha_c, \beta_c$
. In the case of a virtual knot, the smoothed diagram is a two-component virtual link, and in the case of a knotoid, it is a loop constituent and a segment constituent. An intersection index, denoted
 $\mathrm{in}(c)$
, is computed from the algebraic intersection number of
$\mathrm{in}(c)$
, is computed from the algebraic intersection number of
 $\alpha_c$
and
$\alpha_c$
and
 $\beta_c$
, and the polynomial invariant takes the form
$\beta_c$
, and the polynomial invariant takes the form
 \begin{equation}F_{\mathcal{D}}(t) = \sum_{c} \mathrm{sgn}(c)(t^{\mathrm{in}(c)} - 1),\end{equation}
\begin{equation}F_{\mathcal{D}}(t) = \sum_{c} \mathrm{sgn}(c)(t^{\mathrm{in}(c)} - 1),\end{equation}
where the sum is taken over all crossings of the diagram
 ${\mathcal{D}}$
. The values of
${\mathcal{D}}$
. The values of
 $\mathrm{in}(c)$
computed for the various index polynomials differ only by sign:
$\mathrm{in}(c)$
computed for the various index polynomials differ only by sign:
-
(i) in Henrich’s index polynomial for virtual knots, the intersection index is taken to be
$\mathrm{in}(c) = |\alpha_c \cdot \beta_c|$
; -
(ii) in Kauffman’s affine index polynomial
$F^{\mathrm{aff}}(t)$
for oriented virtual knots and knotoids, the constituents
$\alpha_c, \beta_c$
are labelled such that
$\alpha_c$
contains the incoming portion of the over-strand and
$\beta_c$
contains the incoming portion of the under-strand. The intersection index is taken to be
$\mathrm{in}(c) = w(c) \;:\!=\; \alpha_c \cdot \beta_c$
. (This is not Kauffman’s original formulation of the affine index polynomial in [
Reference Kauffman23
], but it was shown to be equivalent in [
Reference Folwaczny and Kauffman11
].) -
(iii) in Kim, Im and Lee’s index polynomial
$F^{\mathrm{ind}}(t)$
for knotoids, the constituents
$\alpha_c, \beta_c$
are labelled so that
$\alpha_c$
is the loop constituent and
$\beta_c$
is the segment constituent, and the intersection index is taken to be
$\mathrm{in}(c) = \mathrm{ind}(c) \;:\!=\; \alpha_c \cdot \beta_c$
. See the discussion in [
Reference Linov27
, section 5].











In [
Reference Gügümcü and Kauffman17
], it is shown that for a knotoid k, the affine index polynomial
 $F^{\mathrm{aff}}_k(t)$
satisfies
$F^{\mathrm{aff}}_k(t)$
satisfies
 $F^{\mathrm{aff}}_k(t) = F^{\mathrm{aff}}_k(t^{-1})$
. It follows that the affine index polynomial for knotoids is recoverable from the index polynomial via
$F^{\mathrm{aff}}_k(t) = F^{\mathrm{aff}}_k(t^{-1})$
. It follows that the affine index polynomial for knotoids is recoverable from the index polynomial via
 \[F^{\mathrm{aff}}_k(t) = \frac 12 (F^{\mathrm{ind}}_k(t) + F^{\mathrm{ind}}_k(t^{-1})).\]
\[F^{\mathrm{aff}}_k(t) = \frac 12 (F^{\mathrm{ind}}_k(t) + F^{\mathrm{ind}}_k(t^{-1})).\]
In [ Reference Kim, Im and Lee24 ], the index polynomial is strengthened to a two-variable polynomial
 \[F^{\mathrm{ind}}_{\mathcal{D}}(s,t) = \sum_{c \in U({\mathcal{D}})} \mathrm{sgn}(c)(t^{\mathrm{ind}(c)} -1) + \sum_{c \in O({\mathcal{D}})} \mathrm{sgn}(c)(s^{\mathrm{ind}(c)} - 1).\]
\[F^{\mathrm{ind}}_{\mathcal{D}}(s,t) = \sum_{c \in U({\mathcal{D}})} \mathrm{sgn}(c)(t^{\mathrm{ind}(c)} -1) + \sum_{c \in O({\mathcal{D}})} \mathrm{sgn}(c)(s^{\mathrm{ind}(c)} - 1).\]
Here,
 $U({\mathcal{D}})$
(resp.
$U({\mathcal{D}})$
(resp.
 $O({\mathcal{D}})$
) denotes the set of early undercrossings (resp. early overcrossings) of the diagram
$O({\mathcal{D}})$
) denotes the set of early undercrossings (resp. early overcrossings) of the diagram
 ${\mathcal{D}}$
, the crossings c such that c is first encountered as an undercrossing (resp. overcrossing).
${\mathcal{D}}$
, the crossings c such that c is first encountered as an undercrossing (resp. overcrossing).
4·2. Generalised index polynomials
We now define index polynomial invariants for generalised knotoids. Let
 ${\mathcal{D}}$
be an oriented, constituent-labelled generalised knotoid diagram. Let c be a crossing, and let
${\mathcal{D}}$
be an oriented, constituent-labelled generalised knotoid diagram. Let c be a crossing, and let
 $o_c$
and
$o_c$
and
 $u_c$
denote the constituents of
$u_c$
denote the constituents of
 ${\mathcal{D}}$
containing the over-strand and under-strand at c, respectively. Suppose an oriented smoothing is applied to c. Let
${\mathcal{D}}$
containing the over-strand and under-strand at c, respectively. Suppose an oriented smoothing is applied to c. Let
 $\alpha_c$
denote the constituent of the smoothed diagram containing the incoming portion of
$\alpha_c$
denote the constituent of the smoothed diagram containing the incoming portion of
 $o_c$
, and let
$o_c$
, and let
 $\beta_c$
denote the constituent of the smoothed diagram containing the incoming portion of
$\beta_c$
denote the constituent of the smoothed diagram containing the incoming portion of
 $u_c$
. Note that
$u_c$
. Note that
 $o_c$
and
$o_c$
and
 $u_c$
are not necessarily distinct, and
$u_c$
are not necessarily distinct, and
 $\alpha_c$
and
$\alpha_c$
and
 $\beta_c$
are not necessarily distinct.
$\beta_c$
are not necessarily distinct.
We introduce variables
 $t_{e}$
, and
$t_{e}$
, and
 $s_{e}$
for constituents e and
$s_{e}$
for constituents e and
 $r_{e_1, e_2}$
for pairs of (not necessarily distinct) constituents
$r_{e_1, e_2}$
for pairs of (not necessarily distinct) constituents
 $(e_1, e_2)$
and define
$(e_1, e_2)$
and define
 \[g(c) = r_{o_c, u_c}\left(\prod_{e \in C({\mathcal{D}})} t_e^{\alpha_c \cdot e} - 1\right)\left(\prod_{e \in C({\mathcal{D}})}s_e^{\beta_c \cdot e} - 1\right).\]
\[g(c) = r_{o_c, u_c}\left(\prod_{e \in C({\mathcal{D}})} t_e^{\alpha_c \cdot e} - 1\right)\left(\prod_{e \in C({\mathcal{D}})}s_e^{\beta_c \cdot e} - 1\right).\]
We define the generalised index polynomial by
 \begin{align}G_{\mathcal{D}}(r, s, t) = \sum_c \mathrm{sgn}(c)g(c).\end{align}
\begin{align}G_{\mathcal{D}}(r, s, t) = \sum_c \mathrm{sgn}(c)g(c).\end{align}
Here r represents a vector whose components are the variables
 $r_{e_1, e_2}$
in some fixed order, and s and t are similar. Operations on r, s, and t are applied component-wise. For example, the polynomial
$r_{e_1, e_2}$
in some fixed order, and s and t are similar. Operations on r, s, and t are applied component-wise. For example, the polynomial
 $G_{\mathcal{D}}(r, s^{-1}, t)$
is obtained by replacing
$G_{\mathcal{D}}(r, s^{-1}, t)$
is obtained by replacing
 $s_e$
with
$s_e$
with
 $s_e^{-1}$
for all
$s_e^{-1}$
for all
 $e \in C({\mathcal{D}})$
, and
$e \in C({\mathcal{D}})$
, and
 $G_{\mathcal{D}}(r, t, s)$
is obtained by swapping
$G_{\mathcal{D}}(r, t, s)$
is obtained by swapping
 $t_e$
and
$t_e$
and
 $s_e$
for all
$s_e$
for all
 $e \in C({\mathcal{D}})$
. For r, we let
$e \in C({\mathcal{D}})$
. For r, we let
 $\overline r$
indicate the operation that swaps
$\overline r$
indicate the operation that swaps
 $r_{e_1, e_2}$
and
$r_{e_1, e_2}$
and
 $r_{e_2, e_1}$
for all constituents
$r_{e_2, e_1}$
for all constituents
 $e_1, e_2$
.
$e_1, e_2$
.
Theorem 4·3. The polynomial
 $G_{\mathcal{D}}$
is a generalised knotoid invariant.
$G_{\mathcal{D}}$
is a generalised knotoid invariant.
Proof. Suppose a generalised knotoid
 $\kappa$
has diagrams
$\kappa$
has diagrams
 ${\mathcal{D}}, {\mathcal{D}}'$
related by a Reidemeister move. The crossings of
${\mathcal{D}}, {\mathcal{D}}'$
related by a Reidemeister move. The crossings of
 ${\mathcal{D}}$
and
${\mathcal{D}}$
and
 ${\mathcal{D}}'$
are in natural correspondence except potentially for crossings created or destroyed by a Type I or II Reidemeister move. For corresponding crossings, the values of
${\mathcal{D}}'$
are in natural correspondence except potentially for crossings created or destroyed by a Type I or II Reidemeister move. For corresponding crossings, the values of
 $\mathrm{sgn}(c)$
,
$\mathrm{sgn}(c)$
,
 $o_c$
,
$o_c$
,
 $u_c$
,
$u_c$
,
 $\alpha_c \cdot e$
, and
$\alpha_c \cdot e$
, and
 $\beta_c \cdot e$
are identical for any
$\beta_c \cdot e$
are identical for any
 $e \in C(\kappa)$
. It remains to verify that the crossings created or destroyed by a Type I or Type II Reidemeister move do not contribute to
$e \in C(\kappa)$
. It remains to verify that the crossings created or destroyed by a Type I or Type II Reidemeister move do not contribute to
 $G_{\mathcal{D}}$
.
$G_{\mathcal{D}}$
.
-
(i) Consider a Type I Reidemeister move, and assume without loss of generality that a crossing c is created. Observe that at least one of
$\alpha_c, \beta_c$
is a loop with no crossings, so
$g(c) = 0$
. -
(ii) Consider a Type II Reidemeister move, and assume without loss of generality that two crossings
$c_1, c_2$
are created. Observe that
$c_1$
and
$c_2$
have opposite sign and satisfy
$(o_{c_1}, u_{c_1}) = (o_{c_2}, u_{c_2})$
. Outside of the neighbourhood where the Reidemeister move is performed, the constituents
$\alpha_{c_1}$
and
$\alpha_{c_2}$
are identical, and the constituents
$\beta_{c_1}$
and
$\beta_{c_2}$
are identical. Inside the neighbourhood, the oriented smoothings at
$c_1$
and
$c_2$
each leave one crossing, the two of which are indistinguishable by algebraic intersection numbers. See Figure 12. Thus
$\alpha_{c_1} \cdot e = \alpha_{c_2} \cdot e$
and
$\beta_{c_1} \cdot e = \beta_{c_2} \cdot e$
for any e, and it follows that
$g(c_1)= g(c_2)$
. Finally,
$\mathrm{sgn}(c_1)g(c_1) + \mathrm{sgn}(c_2)g(c_2) = 0$
, as desired.
















The generalised index polynomial extends the affine index polynomial in the following sense.

Fig. 12. Two possible configurations for a Type II Reidemeister move. In each of Figures 12(a) and 12(b), the two diagrams obtained by smoothing at
 $c_1$
and
$c_1$
and
 $c_2$
carry the same algebraic intersection data.
$c_2$
carry the same algebraic intersection data.
Proposition 4·4. Two knotoids have identical affine index polynomials if and only if they have identical generalised index polynomials.
Proof. If
 ${\mathcal{D}}$
is a spherical or planar knotoid diagram, the generalised index polynomial becomes a three-variable polynomial
${\mathcal{D}}$
is a spherical or planar knotoid diagram, the generalised index polynomial becomes a three-variable polynomial
 \[G_{\mathcal{D}}(r,s,t) = \sum_c \mathrm{sgn}(c)r(t^{\alpha_c \cdot e} - 1)(s^{\beta_c \cdot e} -1 ).\]
\[G_{\mathcal{D}}(r,s,t) = \sum_c \mathrm{sgn}(c)r(t^{\alpha_c \cdot e} - 1)(s^{\beta_c \cdot e} -1 ).\]
Here, e is the single segment constituent of
 ${\mathcal{D}}$
. Because self-crossings of
${\mathcal{D}}$
. Because self-crossings of
 $\alpha_c$
create two intersections of
$\alpha_c$
create two intersections of
 $\alpha_c$
with e which cancel each other out, all contributions to
$\alpha_c$
with e which cancel each other out, all contributions to
 $\alpha_c \cdot e$
come about through intersections of
$\alpha_c \cdot e$
come about through intersections of
 $\alpha_c$
with
$\alpha_c$
with
 $\beta_c$
. Hence,
$\beta_c$
. Hence,
 $\alpha_c \cdot e = \alpha_c \cdot \beta_c = -\beta_c \cdot e = w(c)$
. It follows that the affine index polynomial
$\alpha_c \cdot e = \alpha_c \cdot \beta_c = -\beta_c \cdot e = w(c)$
. It follows that the affine index polynomial
 $F^{\mathrm{aff}}_{\mathcal{D}}(t)$
is recovered from
$F^{\mathrm{aff}}_{\mathcal{D}}(t)$
is recovered from
 $G_{\mathcal{D}}(s,t)$
by
$G_{\mathcal{D}}(s,t)$
by
 \[F^{\mathrm{aff}}_{\mathcal{D}}(t) = -G_{\mathcal{D}}(1, 0, t).\]
\[F^{\mathrm{aff}}_{\mathcal{D}}(t) = -G_{\mathcal{D}}(1, 0, t).\]
Conversely,
 $G_{\mathcal{D}}(r,s,t)$
is recovered from
$G_{\mathcal{D}}(r,s,t)$
is recovered from
 $F^{\mathrm{aff}}_{\mathcal{D}}(t)$
by
$F^{\mathrm{aff}}_{\mathcal{D}}(t)$
by
 \[G_{\mathcal{D}}(r,s,t) = r(F^{\mathrm{aff}}_{\mathcal{D}}(ts^{-1}) - F^{\mathrm{aff}}_{\mathcal{D}}(t) - F^{\mathrm{aff}}_{\mathcal{D}}(s^{-1})).\]
\[G_{\mathcal{D}}(r,s,t) = r(F^{\mathrm{aff}}_{\mathcal{D}}(ts^{-1}) - F^{\mathrm{aff}}_{\mathcal{D}}(t) - F^{\mathrm{aff}}_{\mathcal{D}}(s^{-1})).\]
By Proposition 4·1, the generalised index polynomial is trivial for any classical link.
If a generalised knotoid diagram
 ${\mathcal{D}}$
is the disjoint union of diagrams
${\mathcal{D}}$
is the disjoint union of diagrams
 ${\mathcal{D}}_1$
and
${\mathcal{D}}_1$
and
 ${\mathcal{D}}_2$
with no crossings occuring between constituents of
${\mathcal{D}}_2$
with no crossings occuring between constituents of
 ${\mathcal{D}}_1$
and
${\mathcal{D}}_1$
and
 ${\mathcal{D}}_2$
, then the generalised index polynomial
${\mathcal{D}}_2$
, then the generalised index polynomial
 $G_{\mathcal{D}}$
provides no information on their relative positioning. For example, a valency-zero pole can be moved to any region of a diagram without changing the generalised index polynomial.
$G_{\mathcal{D}}$
provides no information on their relative positioning. For example, a valency-zero pole can be moved to any region of a diagram without changing the generalised index polynomial.
We extend the generalised index polynomial for pole-labelled generalised knotoids with at least one pole. Given a diagram
 ${\mathcal{D}}$
and a fixed pole
${\mathcal{D}}$
and a fixed pole
 $P \in P({\mathcal{D}})$
, we choose oriented shortcuts
$P \in P({\mathcal{D}})$
, we choose oriented shortcuts
 $\{\gamma_Q \mid Q \in P({\mathcal{D}})\}$
from P to each pole in
$\{\gamma_Q \mid Q \in P({\mathcal{D}})\}$
from P to each pole in
 ${\mathcal{D}}$
. For a constituent e, let
${\mathcal{D}}$
. For a constituent e, let
 $\textbf{1}_L(e)$
denote the indicator function that is 1 if e is a loop constituent and 0 otherwise. We introduce variables
$\textbf{1}_L(e)$
denote the indicator function that is 1 if e is a loop constituent and 0 otherwise. We introduce variables
 $a_Q, b_Q$
for each
$a_Q, b_Q$
for each
 $Q \in P({\mathcal{D}})$
and define, for each crossing c, the polynomial
$Q \in P({\mathcal{D}})$
and define, for each crossing c, the polynomial
 \[h_P(c) = \left(\prod_{Q \in P({\mathcal{D}})} a_Q^{\gamma_Q \cdot \alpha_c}\right)^{\textbf{1}_L(\alpha_c)}\left(\prod_{Q \in P({\mathcal{D}})} b_Q^{\gamma_Q \cdot \beta_c}\right)^{\textbf{1}_L(\beta_c)}.\]
\[h_P(c) = \left(\prod_{Q \in P({\mathcal{D}})} a_Q^{\gamma_Q \cdot \alpha_c}\right)^{\textbf{1}_L(\alpha_c)}\left(\prod_{Q \in P({\mathcal{D}})} b_Q^{\gamma_Q \cdot \beta_c}\right)^{\textbf{1}_L(\beta_c)}.\]
We define the base-pointed index polynomial by
 \begin{equation} G_{{\mathcal{D}}, P}(r,s,t,a,b) = \sum_c \mathrm{sgn}(c)g(c)h_P(c).\end{equation}
\begin{equation} G_{{\mathcal{D}}, P}(r,s,t,a,b) = \sum_c \mathrm{sgn}(c)g(c)h_P(c).\end{equation}
The notational remarks following Equation (4·2·1) apply to the variables a and b as well.
By Corollary 4·2, the base-pointed index polynomial is independent of the choice of shortcuts
 $\gamma_Q$
, and the proof that
$\gamma_Q$
, and the proof that
 $G_{{\mathcal{D}}, P}$
is a generalised knotoid invariant is identical to the proof of Theorem 4·3. The choice of the base-point pole P is immaterial. If P ′ is another pole, the polynomial
$G_{{\mathcal{D}}, P}$
is a generalised knotoid invariant is identical to the proof of Theorem 4·3. The choice of the base-point pole P is immaterial. If P ′ is another pole, the polynomial
 $G_{{\mathcal{D}}, P'}$
is obtained from
$G_{{\mathcal{D}}, P'}$
is obtained from
 $G_{{\mathcal{D}}, P}$
in the following way. Since we can take as shortcut from P ′ to any other pole Q the path obtained by reversing the orientation of
$G_{{\mathcal{D}}, P}$
in the following way. Since we can take as shortcut from P ′ to any other pole Q the path obtained by reversing the orientation of
 $\gamma_{P'}$
and then adding to it the shortcut from P to Q, this modifies each monomial in
$\gamma_{P'}$
and then adding to it the shortcut from P to Q, this modifies each monomial in
 $G_{{\mathcal{D}}, P}$
by subtracting the exponent of
$G_{{\mathcal{D}}, P}$
by subtracting the exponent of
 $a_{P'}$
from the exponent of each
$a_{P'}$
from the exponent of each
 $a_Q$
and subtracting the exponent of
$a_Q$
and subtracting the exponent of
 $b_{P'}$
from the exponent of each
$b_{P'}$
from the exponent of each
 $b_Q$
.
$b_Q$
.
Example 4·5. The generalised knotoid
 $\kappa$
in Figure 13(a) has
$\kappa$
in Figure 13(a) has
 \[G_{\kappa, P} = r_{e_1, e_1}((s_{e_2}^2 - 1)a_Q^{-1}a_R^{-1}b_Qb_R^{-1} - (t_{e_2} - 1)(s_{e_2}-1)a_Q^{-1}a_R^{-2}b_Q)\]
\[G_{\kappa, P} = r_{e_1, e_1}((s_{e_2}^2 - 1)a_Q^{-1}a_R^{-1}b_Qb_R^{-1} - (t_{e_2} - 1)(s_{e_2}-1)a_Q^{-1}a_R^{-2}b_Q)\]
and
 \[G_{\kappa, R} = r_{e_1, e_1}((s_{e_2}^2 - 1)a_Pb_Pb_Q^2 - (t_{e_2} - 1)(s_{e_2}-1)a_P^2a_Q^1b_Q).\]
\[G_{\kappa, R} = r_{e_1, e_1}((s_{e_2}^2 - 1)a_Pb_Pb_Q^2 - (t_{e_2} - 1)(s_{e_2}-1)a_P^2a_Q^1b_Q).\]

Fig. 13. Finding polynomials of certain generalised knotoids.
Example 4·6. The generalised knotoid
 $\kappa$
in Figure 13(b) has
$\kappa$
in Figure 13(b) has
 $G_{\kappa, P} = 0$
, so the base-pointed generalised index polynomial cannot distinguish
$G_{\kappa, P} = 0$
, so the base-pointed generalised index polynomial cannot distinguish
 $\kappa$
from a diagram with no crossings. However, every diagram of
$\kappa$
from a diagram with no crossings. However, every diagram of
 $\kappa$
has at least one crossing since
$\kappa$
has at least one crossing since
 $\mathrm{lk}(e_1, e_2) = 1/2$
.
$\mathrm{lk}(e_1, e_2) = 1/2$
.
We now define a variant of the base-pointed index polynomial. With all notation as before, define
 \[\tilde g(c) = r_{o_c, u_c}\prod\limits_{e \in C({\mathcal{D}})}t_e^{\alpha_c \cdot e}s_e^{\beta_c \cdot e}\]
\[\tilde g(c) = r_{o_c, u_c}\prod\limits_{e \in C({\mathcal{D}})}t_e^{\alpha_c \cdot e}s_e^{\beta_c \cdot e}\]
and
 \[\tilde h_P(c) = \left(\textbf{1}_L(\alpha_c)\prod_{Q \in P({\mathcal{D}})} a_Q^{\gamma_Q \cdot \alpha_c} - 1\right)\left(\textbf{1}_L(\beta_c)\prod_{Q \in P({\mathcal{D}})} b_Q^{\gamma_Q \cdot \beta_c} -1\right).\]
\[\tilde h_P(c) = \left(\textbf{1}_L(\alpha_c)\prod_{Q \in P({\mathcal{D}})} a_Q^{\gamma_Q \cdot \alpha_c} - 1\right)\left(\textbf{1}_L(\beta_c)\prod_{Q \in P({\mathcal{D}})} b_Q^{\gamma_Q \cdot \beta_c} -1\right).\]
We define the pole-centric base-pointed index polynomial by
 \[\tilde G_{{\mathcal{D}}, P}(r,s,t,a,b) = \sum_c \mathrm{sgn}(c)\tilde g(c) \tilde h_P(c).\]
\[\tilde G_{{\mathcal{D}}, P}(r,s,t,a,b) = \sum_c \mathrm{sgn}(c)\tilde g(c) \tilde h_P(c).\]
The proof that
 $\tilde G_{{\mathcal{D}}, P}$
is a generalised knotoid invariant is nearly identical to the proof of Theorem 4·3. The remarks following Equation (4·2·2) for
$\tilde G_{{\mathcal{D}}, P}$
is a generalised knotoid invariant is nearly identical to the proof of Theorem 4·3. The remarks following Equation (4·2·2) for
 $G_{{\mathcal{D}}, P}$
hold for
$G_{{\mathcal{D}}, P}$
hold for
 $\tilde G_{{\mathcal{D}}, P}$
as well.
$\tilde G_{{\mathcal{D}}, P}$
as well.
In analogy to Proposition 4·4, the pole-centric base-pointed index polynomial extends the strengthened index polynomial
 $F^{\mathrm{ind}}(s,t)$
for knotoids. Suppose
$F^{\mathrm{ind}}(s,t)$
for knotoids. Suppose
 $k_1$
and
$k_1$
and
 $k_2$
are two spherical knotoids, each with poles labelled L and H and a constituent oriented from L to H. In what follows, we take
$k_2$
are two spherical knotoids, each with poles labelled L and H and a constituent oriented from L to H. In what follows, we take
 $\alpha_c$
and
$\alpha_c$
and
 $\beta_c$
to be as in the definition of the generalised index polynomial as in Section 4·2, and we take ind(c) to be as defined in Kim, Im, and Lee’s index polynomial in point (iii) under Equation 4·1·1.
$\beta_c$
to be as in the definition of the generalised index polynomial as in Section 4·2, and we take ind(c) to be as defined in Kim, Im, and Lee’s index polynomial in point (iii) under Equation 4·1·1.
Proposition 4·7. If
 $\tilde G_{k_1, L} = \tilde G_{k_2, L}$
, then
$\tilde G_{k_1, L} = \tilde G_{k_2, L}$
, then
 $F^{\mathrm{ind}}_{k_1}(s,t) = F^{\mathrm{ind}}_{k_1}(s,t)$
.
$F^{\mathrm{ind}}_{k_1}(s,t) = F^{\mathrm{ind}}_{k_1}(s,t)$
.
Proof. For a knotoid diagram
 ${\mathcal{D}}$
oriented from L to H, the pole-centric base-pointed index polynomial based at L is a five-variable polynomial
${\mathcal{D}}$
oriented from L to H, the pole-centric base-pointed index polynomial based at L is a five-variable polynomial
 $\tilde G_{{\mathcal{D}}, L}(r, s, t, a_H, b_H)$
. Set
$\tilde G_{{\mathcal{D}}, L}(r, s, t, a_H, b_H)$
. Set
 $r=s=t = 1$
to obtain a two-variable polynomial
$r=s=t = 1$
to obtain a two-variable polynomial
 $\tilde G_{{\mathcal{D}}, L}(a_H, b_H)$
. For each crossing c in
$\tilde G_{{\mathcal{D}}, L}(a_H, b_H)$
. For each crossing c in
 ${\mathcal{D}}$
, exactly one of
${\mathcal{D}}$
, exactly one of
 $\alpha_c, \beta_c$
is a loop constituent. The crossings for which
$\alpha_c, \beta_c$
is a loop constituent. The crossings for which
 $\alpha_c$
is the loop constituent is precisely the set of early undercrossings, and the crossings for which
$\alpha_c$
is the loop constituent is precisely the set of early undercrossings, and the crossings for which
 $\beta_c$
is the loop constituent is precisely the set of early overcrossings. Thus
$\beta_c$
is the loop constituent is precisely the set of early overcrossings. Thus
 \[\tilde G_{{\mathcal{D}}, L}(a_H, b_H) = -\sum_{c \in U(k)} \mathrm{sgn}(c)(a_H^{\gamma_{H} \cdot \alpha_c} - 1) - \sum_{c \in O({\mathcal{D}})} \mathrm{sgn}(c)(b_H^{\gamma_{H} \cdot e} - 1).\]
\[\tilde G_{{\mathcal{D}}, L}(a_H, b_H) = -\sum_{c \in U(k)} \mathrm{sgn}(c)(a_H^{\gamma_{H} \cdot \alpha_c} - 1) - \sum_{c \in O({\mathcal{D}})} \mathrm{sgn}(c)(b_H^{\gamma_{H} \cdot e} - 1).\]
Suppose
 $\alpha_c$
is the loop constituent. Observe that
$\alpha_c$
is the loop constituent. Observe that
 $\beta_c$
defines an oriented shortcut from L to H. It follows from Corollary 4·2 that
$\beta_c$
defines an oriented shortcut from L to H. It follows from Corollary 4·2 that
 \[\gamma_H \cdot \alpha_c = \beta_c \cdot \alpha_c = -\mathrm{ind(c)}.\]
\[\gamma_H \cdot \alpha_c = \beta_c \cdot \alpha_c = -\mathrm{ind(c)}.\]
Similarly, if
 $\beta_c$
is the loop constituent, then
$\beta_c$
is the loop constituent, then
 $\gamma_H \cdot \beta_c = \alpha_c \cdot \beta_c = -\mathrm{ind}(c)$
. Thus we obtain
$\gamma_H \cdot \beta_c = \alpha_c \cdot \beta_c = -\mathrm{ind}(c)$
. Thus we obtain
 \begin{align*} -\tilde G_{{\mathcal{D}}, L}(s^{-1}, t^{-1}) &= \sum_{c \in U({\mathcal{D}})} \mathrm{sgn}(c)(s^{\mathrm{ind}(c)} - 1) + \sum_{c \in O({\mathcal{D}})}\mathrm{sgn}(c)(t^{\mathrm{ind}(c)} - 1)\\ &= F^{\mathrm{ind}}_{\mathcal{D}}(s,t).\end{align*}
\begin{align*} -\tilde G_{{\mathcal{D}}, L}(s^{-1}, t^{-1}) &= \sum_{c \in U({\mathcal{D}})} \mathrm{sgn}(c)(s^{\mathrm{ind}(c)} - 1) + \sum_{c \in O({\mathcal{D}})}\mathrm{sgn}(c)(t^{\mathrm{ind}(c)} - 1)\\ &= F^{\mathrm{ind}}_{\mathcal{D}}(s,t).\end{align*}
In particular, the strengthened index polynomial is recoverable from the pole-centric base-pointed index polynomial, and the conclusion follows.
Example 4·8. The staked knot
 $\kappa$
from Figure 13(c) has
$\kappa$
from Figure 13(c) has
 $\tilde G_{\kappa, P} = a_Qb_Qb_R$
. On the other hand, the base-pointed index polynomial
$\tilde G_{\kappa, P} = a_Qb_Qb_R$
. On the other hand, the base-pointed index polynomial
 $G_{\kappa, P}$
is trivial for any staked link
$G_{\kappa, P}$
is trivial for any staked link
 $\kappa$
by Proposition 4·1.
$\kappa$
by Proposition 4·1.
Question 4·9. Does there exist a pole-labelled, constituent-labelled, oriented generalised knotoid
 $\kappa$
with a pole P such that
$\kappa$
with a pole P such that
 $\tilde G_{\kappa, P} = 0$
but
$\tilde G_{\kappa, P} = 0$
but
 $G_{\kappa, P} \neq 0$
?
$G_{\kappa, P} \neq 0$
?
The index polynomials of the form given by Equation (4·1·1) cannot distinguish between inequivalent planar knotoids with diagrams that are equivalent when considered on the sphere. By viewing a planar knotoid as a generalised knotoid with three poles L, H, and
 $\infty$
and a constituent oriented from L to H, as in Example 2·3, the base-pointed index polynomial and its pole-centric variant yield new invariants for planar knotoids. For example, the planar knotoid k in Figure 13(d) has trivial index polynomial but has
$\infty$
and a constituent oriented from L to H, as in Example 2·3, the base-pointed index polynomial and its pole-centric variant yield new invariants for planar knotoids. For example, the planar knotoid k in Figure 13(d) has trivial index polynomial but has
 $\tilde G_{k, \infty} = a_La_H$
.
$\tilde G_{k, \infty} = a_La_H$
.
Following the notation of [
Reference Turaev31
] and [
Reference Linov27
], we extend the basic knotoid involutions to generalised knotoids and state their effects on the generalised index polynomials. Given a diagram
 ${\mathcal{D}}$
, we let
${\mathcal{D}}$
, we let
 $\mathrm{mir}({\mathcal{D}})$
denote the diagram obtained by toggling all over/under crossing data, and we let
$\mathrm{mir}({\mathcal{D}})$
denote the diagram obtained by toggling all over/under crossing data, and we let
 $\mathrm{sym}({\mathcal{D}})$
denote the diagram obtained by reflecting across a great circle of
$\mathrm{sym}({\mathcal{D}})$
denote the diagram obtained by reflecting across a great circle of
 $S^2$
(and preserving crossing data). We let rot denote the composition
$S^2$
(and preserving crossing data). We let rot denote the composition
 $\mathrm{mir} \circ \mathrm{sym} = \mathrm{sym} \circ \mathrm{mir}$
. For an oriented diagram
$\mathrm{mir} \circ \mathrm{sym} = \mathrm{sym} \circ \mathrm{mir}$
. For an oriented diagram
 ${\mathcal{D}}$
, we let
${\mathcal{D}}$
, we let
 $\mathrm{rev}({\mathcal{D}})$
denote the diagram obtained by reversing the orientation on all constituents. It is clear that mir, sym, rot, and rev define involutions on the set of generalised knotoids, possibly labelled or oriented. Note that mir, sym, and rot preserve the underlying directed graph of an oriented generalised knotoid, while rev may not.
$\mathrm{rev}({\mathcal{D}})$
denote the diagram obtained by reversing the orientation on all constituents. It is clear that mir, sym, rot, and rev define involutions on the set of generalised knotoids, possibly labelled or oriented. Note that mir, sym, and rot preserve the underlying directed graph of an oriented generalised knotoid, while rev may not.
Proposition 4·10. Let
 $\kappa$
be pole-labelled, constituent-labelled, oriented generalised knotoid and let
$\kappa$
be pole-labelled, constituent-labelled, oriented generalised knotoid and let
 $P \in P(\kappa)$
. The base-pointed index polynomial satisfies:
$P \in P(\kappa)$
. The base-pointed index polynomial satisfies:
-
(a)
$G_{\mathrm{mir}(\kappa), \mathrm{mir}(P)}(r,s,t,a,b) = -G_{\kappa, P}(\overline r, t, s, b, a)$
; -
(b)
$G_{\mathrm{sym}(\kappa), \mathrm{sym}(P)}(r,s,t,a,b) = -G_{\kappa, P}(r, s^{-1}, t^{-1}, a^{-1}, b^{-1})$
; -
(c)
$G_{\mathrm{rot}(\kappa), \mathrm{rot}(P)}(r,s,t,a,b) = G_{\kappa, P}(\overline r, t^{-1}, s^{-1}, b^{-1}, a^{-1})$
.



Identical relationships hold for the pole-centric variant.
Proof. Part (a) follows from the fact that, for each crossing c, the operation mir negates
 $\mathrm{sgn}(c)$
and swaps
$\mathrm{sgn}(c)$
and swaps
 $\alpha_c$
and
$\alpha_c$
and
 $\beta_c$
. Part (b) follows from the fact that sym negates both the sign of each crossing and all algebraic intersection numbers. Part (c) follows from (a) and (b).
$\beta_c$
. Part (b) follows from the fact that sym negates both the sign of each crossing and all algebraic intersection numbers. Part (c) follows from (a) and (b).
Thus the base-pointed index polynomials may be used to distinguish between
 $\kappa$
and its images under these three basic involutions. But no such relationship holds for rev.
$\kappa$
and its images under these three basic involutions. But no such relationship holds for rev.
The base-pointed index polynomials also yield lower bounds on the height between poles in a generalised knotoid. Given a Laurent polynomial
 $F \in \mathbb Z[x_1^{\pm 1}, \dots, x_n^{\pm 1}]$
, we let
$F \in \mathbb Z[x_1^{\pm 1}, \dots, x_n^{\pm 1}]$
, we let
 $[x_i]F \in \mathbb Z[x_1^{\pm 1}, \dots, x_{i-1}^{\pm 1}, x_{i+1}^{\pm 1}, \dots, x_n^{\pm 1}]$
denote the coefficient of
$[x_i]F \in \mathbb Z[x_1^{\pm 1}, \dots, x_{i-1}^{\pm 1}, x_{i+1}^{\pm 1}, \dots, x_n^{\pm 1}]$
denote the coefficient of
 $x_i$
in F. For any subset
$x_i$
in F. For any subset
 $S = \{x_{i_1}, \dots, x_{i_m}\}$
of the variables and a monomial
$S = \{x_{i_1}, \dots, x_{i_m}\}$
of the variables and a monomial
 $M = \prod_{j=1}^n x_j^{u_j}$
, we define
$M = \prod_{j=1}^n x_j^{u_j}$
, we define
 $\deg_S(M)=\sum_{k=1}^m |u_{i_k}|$
, and we let
$\deg_S(M)=\sum_{k=1}^m |u_{i_k}|$
, and we let
 $\deg_S(F)$
denote the maximum of
$\deg_S(F)$
denote the maximum of
 $\deg_S(M)$
over all monomials M with nonzero coefficient F. (We omit the set notation from S for brevity.)
$\deg_S(M)$
over all monomials M with nonzero coefficient F. (We omit the set notation from S for brevity.)
Proposition 4·11. Let
 $\kappa$
be a pole-labelled, constituent-labelled, oriented generalised knotoid and let
$\kappa$
be a pole-labelled, constituent-labelled, oriented generalised knotoid and let
 $P, Q \in P(\kappa)$
be poles. Then
$P, Q \in P(\kappa)$
be poles. Then
 \[h_\kappa(P,Q) \ge \sum_{e \in C(\kappa)} \deg_{a_Q, b_Q}([r_{e, e}]G_{\kappa, P}).\]
\[h_\kappa(P,Q) \ge \sum_{e \in C(\kappa)} \deg_{a_Q, b_Q}([r_{e, e}]G_{\kappa, P}).\]
An identical inequality holds with
 $G_{\kappa, P}$
replaced by
$G_{\kappa, P}$
replaced by
 $\tilde G_{\kappa, P}$
.
$\tilde G_{\kappa, P}$
.
Proof. The following argument holds for both
 $G_{\kappa, P}$
and
$G_{\kappa, P}$
and
 $\tilde G_{\kappa, P}$
. Let
$\tilde G_{\kappa, P}$
. Let
 ${\mathcal{D}}$
be any diagram representing
${\mathcal{D}}$
be any diagram representing
 $\kappa$
and let
$\kappa$
and let
 $\gamma$
be any shortcut oriented from P to Q. It suffices to show that, for any constituent
$\gamma$
be any shortcut oriented from P to Q. It suffices to show that, for any constituent
 $e \in C({\mathcal{D}})$
, the number of intersections
$e \in C({\mathcal{D}})$
, the number of intersections
 $\#(\gamma \cap e)$
of
$\#(\gamma \cap e)$
of
 $\gamma$
with e away from poles is at least
$\gamma$
with e away from poles is at least
 $d \;:\!=\; \deg_{a_Q, b_Q}([r_{e,e}]G_{\kappa, P})$
.
$d \;:\!=\; \deg_{a_Q, b_Q}([r_{e,e}]G_{\kappa, P})$
.
If
 $d = 0$
, this is trivial. Assuming
$d = 0$
, this is trivial. Assuming
 $d > 0$
, the diagram
$d > 0$
, the diagram
 ${\mathcal{D}}$
must contain a crossing c with
${\mathcal{D}}$
must contain a crossing c with
 $o_c = u_c = e$
and
$o_c = u_c = e$
and
 $\textbf{1}_L(\alpha_c)|\gamma_Q \cdot \alpha_c| + \textbf{1}_L(\beta_c)|\gamma_Q \cdot \beta_c| = d$
. Note that
$\textbf{1}_L(\alpha_c)|\gamma_Q \cdot \alpha_c| + \textbf{1}_L(\beta_c)|\gamma_Q \cdot \beta_c| = d$
. Note that
 $\alpha_c \neq \beta_c$
, and
$\alpha_c \neq \beta_c$
, and
 \begin{align*} \#(\gamma \cap e) &= \#(\gamma \cap \alpha_c) + \#(\gamma \cap \beta_c)\\ &\ge |\gamma_Q \cdot \alpha_c| + |\gamma_Q \cdot \beta_c|\\ &\ge d. \end{align*}
\begin{align*} \#(\gamma \cap e) &= \#(\gamma \cap \alpha_c) + \#(\gamma \cap \beta_c)\\ &\ge |\gamma_Q \cdot \alpha_c| + |\gamma_Q \cdot \beta_c|\\ &\ge d. \end{align*}
Proposition 4·11 implies that the generalised knotoid
 $\kappa_1$
from Example 4·5 has
$\kappa_1$
from Example 4·5 has
 $h_{\kappa_1}(P, Q) = h_{\kappa_1}(P, R) = h_{\kappa_1}(R,Q) = 2$
, and the generalised knotoid
$h_{\kappa_1}(P, Q) = h_{\kappa_1}(P, R) = h_{\kappa_1}(R,Q) = 2$
, and the generalised knotoid
 $\kappa_2$
from Example 13(c) has
$\kappa_2$
from Example 13(c) has
 $h_{\kappa_2}(P, Q) = 2$
and
$h_{\kappa_2}(P, Q) = 2$
and
 $h_{\kappa_2}(P, R) = h_{\kappa_2}(Q,R) = 1$
.
$h_{\kappa_2}(P, R) = h_{\kappa_2}(Q,R) = 1$
.
For certain generalised knotoids
 $\kappa$
, the polynomials
$\kappa$
, the polynomials
 $G_{\kappa, P}$
or
$G_{\kappa, P}$
or
 $\tilde G_{\kappa, P}$
give more information than the bound stated in Proposition 4·11, as the bound only considers intersections of a shortcut
$\tilde G_{\kappa, P}$
give more information than the bound stated in Proposition 4·11, as the bound only considers intersections of a shortcut
 $\gamma$
with loops
$\gamma$
with loops
 $\alpha_c, \beta_c$
that result from smoothing at a self-intersection of a constituent e. The generalised knotoid
$\alpha_c, \beta_c$
that result from smoothing at a self-intersection of a constituent e. The generalised knotoid
 $\kappa$
in Figure 13(e) has
$\kappa$
in Figure 13(e) has
 $\tilde G_{\kappa, P} = 2r_{e_1, e_2}a_Q^{-2}$
, and an argument similar to the proof of Proposition 4·11 shows that
$\tilde G_{\kappa, P} = 2r_{e_1, e_2}a_Q^{-2}$
, and an argument similar to the proof of Proposition 4·11 shows that
 $h_\kappa(P,Q) = 2$
despite the fact that Proposition 4·11 only yields the trivial bound
$h_\kappa(P,Q) = 2$
despite the fact that Proposition 4·11 only yields the trivial bound
 $h_\kappa(P, Q) \ge 0$
.
$h_\kappa(P, Q) \ge 0$
.
We remark on non-constituent-labelled generalised knotoids. If
 $\kappa$
is simply an oriented, generalised knotoid, we obtain a two-variable generalised index polynomial
$\kappa$
is simply an oriented, generalised knotoid, we obtain a two-variable generalised index polynomial
 $G_{\kappa}(s,t)$
by computing the generalised index polynomial of
$G_{\kappa}(s,t)$
by computing the generalised index polynomial of
 $\kappa$
with constituents arbitrarily labelled, and then setting
$\kappa$
with constituents arbitrarily labelled, and then setting
 $r_{e_1, e_2}=1$
,
$r_{e_1, e_2}=1$
,
 $t_{e_1}=t$
, and
$t_{e_1}=t$
, and
 $s_{e_1} = s$
for all
$s_{e_1} = s$
for all
 $e_1, e_2 \in C(\kappa)$
. In the case that
$e_1, e_2 \in C(\kappa)$
. In the case that
 $\kappa$
is pole-labelled, we again label the constituents arbitrarily and compute the base-pointed index polynomial (or the pole-centric variant). We then re-index the variables
$\kappa$
is pole-labelled, we again label the constituents arbitrarily and compute the base-pointed index polynomial (or the pole-centric variant). We then re-index the variables
 $r_{e_1, e_2}, t_e, s_e$
as follows. Each subscript e corresponding to a segment constituent e oriented from pole P to pole Q is replaced by (P, Q), and all subscripts corresponding to loop constituents are replaced by a single symbol L.
$r_{e_1, e_2}, t_e, s_e$
as follows. Each subscript e corresponding to a segment constituent e oriented from pole P to pole Q is replaced by (P, Q), and all subscripts corresponding to loop constituents are replaced by a single symbol L.
5. A bracket polynomial for generalised knotoids
5·1. Generalised bracket polynomial
We define an extension of the Kauffman bracket polynomial for oriented, pole-labelled, edge-labelled generalised knotoids.
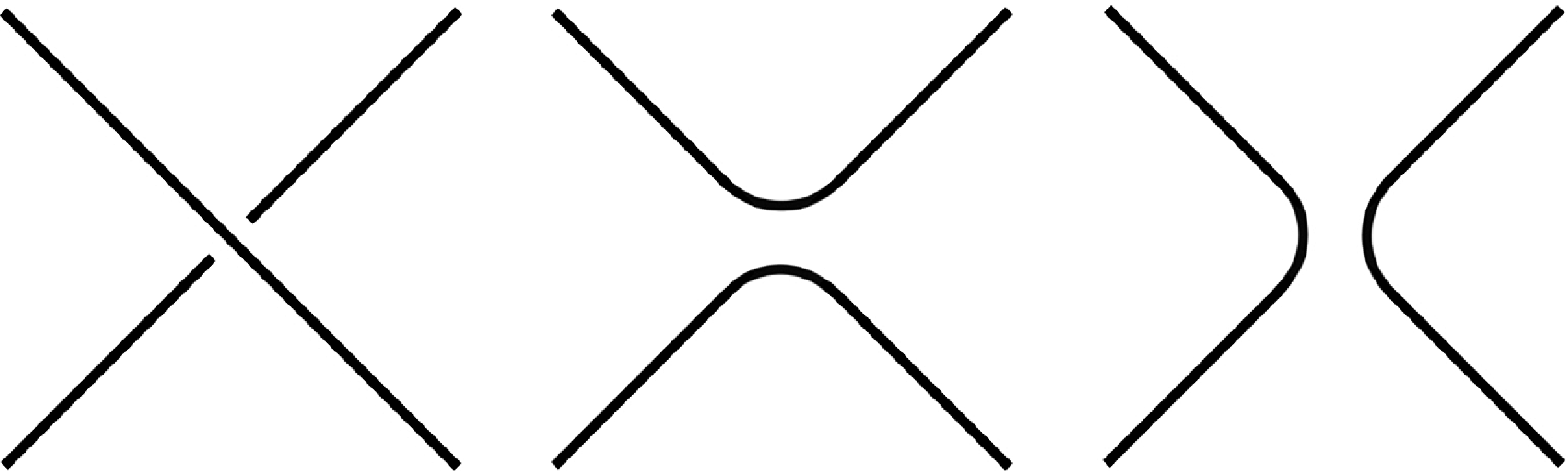
Fig. 14. A crossing, its A-type smoothing, and its B-type smoothing, respectively.
Given a generalised knotoid diagram
 ${\mathcal{D}}$
and a crossing c in
${\mathcal{D}}$
and a crossing c in
 ${\mathcal{D}}$
, a smoothing at c is one of the two operations pictured in Figure 14, and is either A-type or B-type. Observe that a smoothing preserves the number of segment constituents. A state s of
${\mathcal{D}}$
, a smoothing at c is one of the two operations pictured in Figure 14, and is either A-type or B-type. Observe that a smoothing preserves the number of segment constituents. A state s of
 ${\mathcal{D}}$
is a diagram obtained by smoothing at each of the crossings of
${\mathcal{D}}$
is a diagram obtained by smoothing at each of the crossings of
 ${\mathcal{D}}$
. Let
${\mathcal{D}}$
. Let
 $\sigma(s)$
denote the number of A-type smoothings of s minus the number of B-type smoothings of s. Observe that s has no crossings and has the same number of segment constituents as D, though in general, there is no natural correspondence between the segment constituents of D and s.
$\sigma(s)$
denote the number of A-type smoothings of s minus the number of B-type smoothings of s. Observe that s has no crossings and has the same number of segment constituents as D, though in general, there is no natural correspondence between the segment constituents of D and s.
For every state s, we define auxiliary polynomials
 $G_s$
,
$G_s$
,
 $L_s$
, and
$L_s$
, and
 $E_s$
to record the data of the state’s underlying graph, loop constituents, and segment constituents, respectively. They are as follows.
$E_s$
to record the data of the state’s underlying graph, loop constituents, and segment constituents, respectively. They are as follows.
Introduce variables
 $\lambda_{\{P,Q\}}$
for every unordered pair
$\lambda_{\{P,Q\}}$
for every unordered pair
 $\{P, Q\}$
of not necessarily distinct poles
$\{P, Q\}$
of not necessarily distinct poles
 $P,Q \in P({\mathcal{D}})$
and let s(P, Q) denote the number of edges between P and Q in the underlying graph of s. Define the polynomial
$P,Q \in P({\mathcal{D}})$
and let s(P, Q) denote the number of edges between P and Q in the underlying graph of s. Define the polynomial
 \[G_s = \prod_{\{P,Q\}}\lambda_{\{P, Q\}}^{s(P,Q)}.\]
\[G_s = \prod_{\{P,Q\}}\lambda_{\{P, Q\}}^{s(P,Q)}.\]
Let
 $2^{P({\mathcal{D}})}/\sim$
denote the set of unordered bipartitions of the poles of
$2^{P({\mathcal{D}})}/\sim$
denote the set of unordered bipartitions of the poles of
 ${\mathcal{D}}$
. (The equivalence relation
${\mathcal{D}}$
. (The equivalence relation
 $\sim$
identifies each subset of
$\sim$
identifies each subset of
 $P({\mathcal{D}})$
with its complement.) Each loop constituent of s separates the sphere into two regions and determines an element of
$P({\mathcal{D}})$
with its complement.) Each loop constituent of s separates the sphere into two regions and determines an element of
 $2^{P({\mathcal{D}})}/\sim$
. For each
$2^{P({\mathcal{D}})}/\sim$
. For each
 $U \in 2^{P({\mathcal{D}})}/\sim$
, let
$U \in 2^{P({\mathcal{D}})}/\sim$
, let
 $n_U(s)$
denote the number of loop constituents of s corresponding to U. Let
$n_U(s)$
denote the number of loop constituents of s corresponding to U. Let
 $n_0(s) \;:\!=\; n_{[\emptyset]}(s)$
denote the number of loops that create a region with no poles. We call such loops nullhomotopic. We define the polynomial
$n_0(s) \;:\!=\; n_{[\emptyset]}(s)$
denote the number of loops that create a region with no poles. We call such loops nullhomotopic. We define the polynomial
 $L_s$
in variables
$L_s$
in variables
 $\{x_U \mid U \in 2^{P({\mathcal{D}})}/\sim, U \neq [\emptyset]\}$
by
$\{x_U \mid U \in 2^{P({\mathcal{D}})}/\sim, U \neq [\emptyset]\}$
by
 \[L_s = \prod_{\substack{U \in 2^{P({\mathcal{D}})}/\sim\\U \neq [\emptyset]}}x_U^{n_U(s)}.\]
\[L_s = \prod_{\substack{U \in 2^{P({\mathcal{D}})}/\sim\\U \neq [\emptyset]}}x_U^{n_U(s)}.\]
Fix a set of shortcuts
 $\{\alpha_{P,Q} \mid P, Q \in P({\mathcal{D}})\}$
between every pair of poles of
$\{\alpha_{P,Q} \mid P, Q \in P({\mathcal{D}})\}$
between every pair of poles of
 ${\mathcal{D}}$
, where
${\mathcal{D}}$
, where
 $\alpha_{P,Q}$
is oriented from P to Q. Suppose e, f are segment constituents, each belonging to either
$\alpha_{P,Q}$
is oriented from P to Q. Suppose e, f are segment constituents, each belonging to either
 ${\mathcal{D}}$
or one of its states. Given orientations on e and f, define
${\mathcal{D}}$
or one of its states. Given orientations on e and f, define
 \[\mu_{e,f}(P,Q) = e \cdot \alpha_{P,Q} - f \cdot \alpha_{P,Q}.\]
\[\mu_{e,f}(P,Q) = e \cdot \alpha_{P,Q} - f \cdot \alpha_{P,Q}.\]
We say e and f are aligned and write
 $e \parallel f$
if their endpoint poles coincide and they are identical (as unoriented constituents) in a neighbourhood of each of the endpoint poles.
$e \parallel f$
if their endpoint poles coincide and they are identical (as unoriented constituents) in a neighbourhood of each of the endpoint poles.
Suppose
 $e \in E({\mathcal{D}})$
is oriented from pole
$e \in E({\mathcal{D}})$
is oriented from pole
 $e_0$
to pole
$e_0$
to pole
 $e_1$
. For a given state s, there is at most one
$e_1$
. For a given state s, there is at most one
 $e_s \in E(s)$
aligned with e. If such an
$e_s \in E(s)$
aligned with e. If such an
 $e_s$
exists, we give it the orientation that agrees with e near
$e_s$
exists, we give it the orientation that agrees with e near
 $e_0$
and
$e_0$
and
 $e_1$
. Define the polynomial
$e_1$
. Define the polynomial
 $E_s$
in variables
$E_s$
in variables
 $\{y_{e, P} \mid e \in E({\mathcal{D}}), P \in P({\mathcal{D}})\}$
by
$\{y_{e, P} \mid e \in E({\mathcal{D}}), P \in P({\mathcal{D}})\}$
by
 \[E_s = \prod_{\substack{e \parallel e_s\\p \in P({\mathcal{D}})}}y_{e, P}^{\mu_{e_s, e}(e_0, P)},\]
\[E_s = \prod_{\substack{e \parallel e_s\\p \in P({\mathcal{D}})}}y_{e, P}^{\mu_{e_s, e}(e_0, P)},\]
where the product is taken over all
 $e \in E({\mathcal{D}}), P \in P({\mathcal{D}})$
such that s has a segment constituent
$e \in E({\mathcal{D}}), P \in P({\mathcal{D}})$
such that s has a segment constituent
 $e_s \in E(s)$
with
$e_s \in E(s)$
with
 $e \parallel e_s$
.
$e \parallel e_s$
.
Finally, define the generalised bracket polynomial
 $\ll {\mathcal{D}} \gg$
as the Laurent polynomial in variables A,
$\ll {\mathcal{D}} \gg$
as the Laurent polynomial in variables A,
 $\{\lambda_{\{P,Q\}}\}$
,
$\{\lambda_{\{P,Q\}}\}$
,
 $\{x_U\}$
, and
$\{x_U\}$
, and
 $\{y_{e, P}\}$
given by
$\{y_{e, P}\}$
given by
 \begin{equation} \ll {\mathcal{D}} \gg = \sum_{s} A^{\sigma(s)}(\!-\!A^2-A^{-2})^{n_0(s)} \cdot G_s \cdot L_s \cdot E_s.\end{equation}
\begin{equation} \ll {\mathcal{D}} \gg = \sum_{s} A^{\sigma(s)}(\!-\!A^2-A^{-2})^{n_0(s)} \cdot G_s \cdot L_s \cdot E_s.\end{equation}
We show in Lemma 5·1 that
 $E_s$
is well-defined, independent of the choice of shortcuts
$E_s$
is well-defined, independent of the choice of shortcuts
 $\{\alpha_{P,Q}\}$
. The lemma should be thought of as an analog of Corollary 4·2 for closed (but not generic) curves. We argue similarly to the proof given for lemma 8·1 in [
Reference Turaev31
]. (See also the shortcut moves of [
Reference Linov27
].)
$\{\alpha_{P,Q}\}$
. The lemma should be thought of as an analog of Corollary 4·2 for closed (but not generic) curves. We argue similarly to the proof given for lemma 8·1 in [
Reference Turaev31
]. (See also the shortcut moves of [
Reference Linov27
].)
Lemma 5·1. Suppose e, f are segment constituents, each belonging to either
 ${\mathcal{D}}$
or one of its states, with
${\mathcal{D}}$
or one of its states, with
 $e \parallel f$
and orientations that agree near their endpoints. Let
$e \parallel f$
and orientations that agree near their endpoints. Let
 $P, Q \in P({\mathcal{D}})$
. Then
$P, Q \in P({\mathcal{D}})$
. Then
 $\mu_{e,f}(P,Q)$
does not depend on the choice of shortcut
$\mu_{e,f}(P,Q)$
does not depend on the choice of shortcut
 $\alpha_{P,Q}$
.
$\alpha_{P,Q}$
.
Proof. Observe that any shortcut between P and Q is obtainable from
 $\alpha_{P,Q}$
by a sequence of local transformations of the following types:
$\alpha_{P,Q}$
by a sequence of local transformations of the following types:
-
(i) pulling
$\alpha_{P,Q}$
across a strand of
${\mathcal{D}}$
(c.f. Type II Reidemeister); -
(ii) pulling
$\alpha_{P,Q}$
across a crossing of
${\mathcal{D}}$
(c.f. Type III Reidemeister); -
(iii) pulling
$\alpha_{P,Q}$
across a pole other than P or Q (c.f. pole slide move); -
(iv) pulling
$\alpha_{P,Q}$
across a strand of
${\mathcal{D}}$
, near P or Q (c.f. pole twist move).







Observe that (i) and (ii) each preserve
 $e \cdot \alpha_{P,Q}$
and
$e \cdot \alpha_{P,Q}$
and
 $f \cdot \alpha_{P,Q}$
, while (iii) and (iv) each preserve
$f \cdot \alpha_{P,Q}$
, while (iii) and (iv) each preserve
 $e \cdot \alpha_{P,Q} - f \cdot \alpha_{P,Q}$
by the alignment condition.
$e \cdot \alpha_{P,Q} - f \cdot \alpha_{P,Q}$
by the alignment condition.
Corollary 5·2. With e, f as in Lemma 5·1, we have
 $\mu_{e,f}(P,P) = 0$
.
$\mu_{e,f}(P,P) = 0$
.
The normalised generalised bracket polynomial
 $\ll {\mathcal{D}} \gg_*$
is defined by
$\ll {\mathcal{D}} \gg_*$
is defined by
 \[\ll {\mathcal{D}} \gg_* = (\!-\!A^3)^{-\mathrm{wr}({\mathcal{D}})} \ll {\mathcal{D}} \gg.\]
\[\ll {\mathcal{D}} \gg_* = (\!-\!A^3)^{-\mathrm{wr}({\mathcal{D}})} \ll {\mathcal{D}} \gg.\]
Here, the writhe
 $\mathrm{wr}({\mathcal{D}})$
of the oriented generalised knotoid diagram
$\mathrm{wr}({\mathcal{D}})$
of the oriented generalised knotoid diagram
 ${\mathcal{D}}$
is defined by the sum of
${\mathcal{D}}$
is defined by the sum of
 $\mathrm{sgn}(c)$
over all crossings c in
$\mathrm{sgn}(c)$
over all crossings c in
 ${\mathcal{D}}$
.
${\mathcal{D}}$
.
Proposition 5·3. The polynomial
 $\ll {\mathcal{D}} \gg_*$
is a generalised knotoid invariant.
$\ll {\mathcal{D}} \gg_*$
is a generalised knotoid invariant.
Proof. Observe that the generalised bracket polynomial satisfies the usual disjoint union and skein relations
 \[\ll {\mathcal{D}} \cup \bigcirc \gg = (\!-\!A^2-A^{-2})\ll {\mathcal{D}} \gg \quad \text{and} \quad \ll {\mathcal{D}} \gg = A\ll {\mathcal{D}}_+ \gg + A^{-1}\ll {\mathcal{D}}_- \gg,\]
\[\ll {\mathcal{D}} \cup \bigcirc \gg = (\!-\!A^2-A^{-2})\ll {\mathcal{D}} \gg \quad \text{and} \quad \ll {\mathcal{D}} \gg = A\ll {\mathcal{D}}_+ \gg + A^{-1}\ll {\mathcal{D}}_- \gg,\]
where
 ${\mathcal{D}}_+$
and
${\mathcal{D}}_+$
and
 ${\mathcal{D}}_-$
denote the diagrams obtained by performing an A-smoothing and a B-smoothing, respectively, at a particular crossing of
${\mathcal{D}}_-$
denote the diagrams obtained by performing an A-smoothing and a B-smoothing, respectively, at a particular crossing of
 ${\mathcal{D}}$
. As with the traditional bracket polynomial for knots, this implies that the normalised polynomial
${\mathcal{D}}$
. As with the traditional bracket polynomial for knots, this implies that the normalised polynomial
 $\ll {\mathcal{D}} \gg_*$
is preserved by Reidemeister moves.
$\ll {\mathcal{D}} \gg_*$
is preserved by Reidemeister moves.
In analogy to Proposition 4·11 for the base-pointed index polynomial, Proposition 5·5 gives lower bounds on heights between poles in terms of the generalised bracket polynomial. Before stating the bounds, we record a lemma.
Lemma 5·4. Let e,f be as in Lemma 5·1 and let
 $P,Q,R \in P({\mathcal{D}})$
. Then
$P,Q,R \in P({\mathcal{D}})$
. Then
 \[\mu_{e,f}(P,Q) + \mu_{e,f}(Q,R) = \mu_{e,f}(P,R).\]
\[\mu_{e,f}(P,Q) + \mu_{e,f}(Q,R) = \mu_{e,f}(P,R).\]
Proof. If
 $P = Q$
or
$P = Q$
or
 $Q = R$
, the result follows from Corollary 5·2, so assume this is not the case. Without loss of generality, we choose
$Q = R$
, the result follows from Corollary 5·2, so assume this is not the case. Without loss of generality, we choose
 $\alpha_{P,Q}$
and
$\alpha_{P,Q}$
and
 $\alpha_{Q,R}$
with no intersections other than poles; by Lemma 5·1, this does not change any of the values in question. Then we obtain a shortcut
$\alpha_{Q,R}$
with no intersections other than poles; by Lemma 5·1, this does not change any of the values in question. Then we obtain a shortcut
 $\tilde \alpha_{P,R}$
by concatenating
$\tilde \alpha_{P,R}$
by concatenating
 $\alpha_{P,Q}$
with
$\alpha_{P,Q}$
with
 $\alpha_{Q,R}$
and perturbing the resulting curve in a neighbourhood of Q so that, locally, it neither passes through Q nor intersects e or f. (This is possible even if e and f have an endpoint at Q since
$\alpha_{Q,R}$
and perturbing the resulting curve in a neighbourhood of Q so that, locally, it neither passes through Q nor intersects e or f. (This is possible even if e and f have an endpoint at Q since
 $e \parallel f$
.) Observe that
$e \parallel f$
.) Observe that
 $e \cdot \alpha_{P,Q} + e \cdot \alpha_{Q, R} = e \cdot \tilde \alpha_{P,R}$
and
$e \cdot \alpha_{P,Q} + e \cdot \alpha_{Q, R} = e \cdot \tilde \alpha_{P,R}$
and
 $f \cdot \alpha_{P,Q} + f \cdot \alpha_{Q, R} = f \cdot \tilde \alpha_{P,R}$
, whence
$f \cdot \alpha_{P,Q} + f \cdot \alpha_{Q, R} = f \cdot \tilde \alpha_{P,R}$
, whence
 \begin{align*} \mu_{e,f}(P,Q) + \mu_{e,f}(Q,R) &= (e \cdot \alpha_{P,Q} - f \cdot \alpha_{P,Q}) + (e \cdot \alpha_{Q,R} - f \cdot \alpha_{Q,R})\\ &= e \cdot \tilde \alpha_{P,Q} - f \cdot \tilde \alpha_{P,Q}\\ &= \mu_{e,f}(P,R), \end{align*}
\begin{align*} \mu_{e,f}(P,Q) + \mu_{e,f}(Q,R) &= (e \cdot \alpha_{P,Q} - f \cdot \alpha_{P,Q}) + (e \cdot \alpha_{Q,R} - f \cdot \alpha_{Q,R})\\ &= e \cdot \tilde \alpha_{P,Q} - f \cdot \tilde \alpha_{P,Q}\\ &= \mu_{e,f}(P,R), \end{align*}
where the last equality follows from Lemma 5·1.
Following the notation of [
Reference Turaev31
], we define the
 $x_i$
-span, denoted
$x_i$
-span, denoted
 $\mathrm{spn}_{x_i}(F)$
, of a Laurent polynomial
$\mathrm{spn}_{x_i}(F)$
, of a Laurent polynomial
 $F \in \mathbb Z[x_1^{\pm 1}, \dots, x_n^{\pm 1}]$
as the non-negative difference between the largest and smallest exponents of
$F \in \mathbb Z[x_1^{\pm 1}, \dots, x_n^{\pm 1}]$
as the non-negative difference between the largest and smallest exponents of
 $x_i$
among monomials with nonzero coefficients in F (by convention,
$x_i$
among monomials with nonzero coefficients in F (by convention,
 $\mathrm{spn}_{x_i}(0) = -\infty$
). Given a generalised knotoid
$\mathrm{spn}_{x_i}(0) = -\infty$
). Given a generalised knotoid
 $\kappa$
and poles
$\kappa$
and poles
 $P, Q \in P(\kappa)$
, we let
$P, Q \in P(\kappa)$
, we let
 $\{P \mid Q\}$
denote the set of variables
$\{P \mid Q\}$
denote the set of variables
 $x_U$
with
$x_U$
with
 $U \in 2^{P(\kappa)}/\sim$
such that P and Q are separated by U.
$U \in 2^{P(\kappa)}/\sim$
such that P and Q are separated by U.
Proposition 5·5. Let
 $\kappa$
be a pole-labelled, constituent-labelled, oriented generalised knotoid and let
$\kappa$
be a pole-labelled, constituent-labelled, oriented generalised knotoid and let
 $P, Q \in P(\kappa)$
be poles. Then:
$P, Q \in P(\kappa)$
be poles. Then:
-
(a)
$h_\kappa(P, Q) \ge \deg_{\{P \mid Q\}}(\ll \kappa \gg_*)$
; -
(b)
$h_\kappa(P, Q) \ge \frac 12\max_{e \in E(\kappa)} \deg_{y_{e, P}}\left(\ll \kappa\gg_* \Big|_{y_{e, Q} = y_{e, P}^{-1}}\right)$
; -
(c)
$h_\kappa(P, Q) \ge \frac 12\max_{e \in E(\kappa)} \mathrm{spn}_{y_{e, P}}\left(\ll \kappa\gg_* \Big|_{y_{e, Q} = y_{e, P}^{-1}}\right)$
.



Proof. Let
 ${\mathcal{D}}$
be any diagram of
${\mathcal{D}}$
be any diagram of
 $\kappa$
and let
$\kappa$
and let
 $\gamma$
be any shortcut oriented from P to Q. Let
$\gamma$
be any shortcut oriented from P to Q. Let
 $d_a$
denote the right side of the inequality in (a). Then there is a state s of
$d_a$
denote the right side of the inequality in (a). Then there is a state s of
 ${\mathcal{D}}$
with
${\mathcal{D}}$
with
 $d_a = \sum_{U \in \{P\mid Q\}} n_U(s)$
. Since
$d_a = \sum_{U \in \{P\mid Q\}} n_U(s)$
. Since
 $\gamma$
has at least one intersection with each loop constituent of s that separates P and Q, part (a) follows.
$\gamma$
has at least one intersection with each loop constituent of s that separates P and Q, part (a) follows.
We now prove (b) and (c). First, suppose e, f are oriented segment constituents, each belonging to either
 ${\mathcal{D}}$
or a state of
${\mathcal{D}}$
or a state of
 ${\mathcal{D}}$
. Each point of intersection of
${\mathcal{D}}$
. Each point of intersection of
 $\gamma$
with
$\gamma$
with
 $e \cup f$
away from poles is counted by
$e \cup f$
away from poles is counted by
 $e \cdot \gamma - f \cdot \gamma$
with multiplicity in
$e \cdot \gamma - f \cdot \gamma$
with multiplicity in
 $\{-2, -1, 0, 1, 2\}$
. It follows that the number of such points, denoted
$\{-2, -1, 0, 1, 2\}$
. It follows that the number of such points, denoted
 $\#(\gamma \cap (e \cup f))$
, satisfies
$\#(\gamma \cap (e \cup f))$
, satisfies
 \begin{equation} \#(\gamma \cap (e \cup f)) \ge \frac 12 |e \cdot \gamma - f \cdot \gamma|. \end{equation}
\begin{equation} \#(\gamma \cap (e \cup f)) \ge \frac 12 |e \cdot \gamma - f \cdot \gamma|. \end{equation}
Let
 $d_b$
denote the right-hand side of the inequality in (b). Suppose
$d_b$
denote the right-hand side of the inequality in (b). Suppose
 $d_b > 0$
. Then there is a segment constituent
$d_b > 0$
. Then there is a segment constituent
 $e \in E({\mathcal{D}})$
, a state s, and a segment constituent
$e \in E({\mathcal{D}})$
, a state s, and a segment constituent
 $e_s \in E(s)$
such that
$e_s \in E(s)$
such that
 $e \parallel e_s$
and
$e \parallel e_s$
and
 \begin{align*} d_b &= \frac 12 |\mu_{e_s, e}(e_0, P) - \mu_{e_s, e}(e_0, Q)|\\ &= \frac 12 |\mu_{e_s, e}(P, Q)|\\ &= \frac 12 |e_s \cdot \gamma - e \cdot \gamma|, \end{align*}
\begin{align*} d_b &= \frac 12 |\mu_{e_s, e}(e_0, P) - \mu_{e_s, e}(e_0, Q)|\\ &= \frac 12 |\mu_{e_s, e}(P, Q)|\\ &= \frac 12 |e_s \cdot \gamma - e \cdot \gamma|, \end{align*}
where the second equality uses Lemma 5·4 and the third uses Lemma 5·1. It follows from Inequality (5·1·2) that
 $\#(\gamma \cap (e_s \cup e)) \ge d_b$
, and part (b) follows.
$\#(\gamma \cap (e_s \cup e)) \ge d_b$
, and part (b) follows.
Finally, let
 $d_c$
denote the right-hand side of the inequality in (c). Assume
$d_c$
denote the right-hand side of the inequality in (c). Assume
 $d_c > d_b$
. Then there is a segment constituent
$d_c > d_b$
. Then there is a segment constituent
 $e \in E({\mathcal{D}})$
, two states
$e \in E({\mathcal{D}})$
, two states
 $s_1, s_2$
, and two segment constituents
$s_1, s_2$
, and two segment constituents
 $f_1 \in E(s_1)$
,
$f_1 \in E(s_1)$
,
 $f_2 \in E(s_2)$
such that
$f_2 \in E(s_2)$
such that
 $e \parallel f_1 \parallel f_2$
and
$e \parallel f_1 \parallel f_2$
and
 \begin{align*} d_c &= \frac 12 |(\mu_{f_1, e}(e_0, P) - \mu_{f_1, e}(e_0, Q)) - (\mu_{f_2, e}(e_0, P) - \mu_{f_2, e}(e_0, Q))|\\ &= \frac 12 |-\mu_{f_1, e}(P, Q) + \mu_{f_2, e}(P,Q)|\\ &= \frac 12 |\mu_{f_2, f_1}(P,Q)|\\ &= \frac 12 |f_2 \cdot \gamma - f_1 \cdot \gamma|, \end{align*}
\begin{align*} d_c &= \frac 12 |(\mu_{f_1, e}(e_0, P) - \mu_{f_1, e}(e_0, Q)) - (\mu_{f_2, e}(e_0, P) - \mu_{f_2, e}(e_0, Q))|\\ &= \frac 12 |-\mu_{f_1, e}(P, Q) + \mu_{f_2, e}(P,Q)|\\ &= \frac 12 |\mu_{f_2, f_1}(P,Q)|\\ &= \frac 12 |f_2 \cdot \gamma - f_1 \cdot \gamma|, \end{align*}
where the second equality uses Lemma 5·4 and the fourth uses Lemma 5·1. It follows from Inequality (5·1·2) that
 $\#(\gamma \cap (f_1 \cup f_2)) \ge d_c$
, and part (c) follows.
$\#(\gamma \cap (f_1 \cup f_2)) \ge d_c$
, and part (c) follows.
Example 5·6. Let
 $\kappa$
denote the generalised knotoid represented by the diagram in Figure 15. Computations yield
$\kappa$
denote the generalised knotoid represented by the diagram in Figure 15. Computations yield
 \begin{align*} \ll \kappa \gg_* = &-\lambda_{QR}\lambda_{PS}(1 + A^{-2} + A^{-2}x_{[\{T\}]} + A^{-4}) - \lambda_{PR}\lambda_{QS}A^{-4}\\ &-\lambda_{PQ}\lambda_{RS}y_{e,Q}y_{e,R}y_{e,S}y_{f,P}^{-1}(A^{-2}y_{f,T} + A^{-4}x_{[\{T\}]} + A^{-6}y_{e,T}^{-1}). \end{align*}
\begin{align*} \ll \kappa \gg_* = &-\lambda_{QR}\lambda_{PS}(1 + A^{-2} + A^{-2}x_{[\{T\}]} + A^{-4}) - \lambda_{PR}\lambda_{QS}A^{-4}\\ &-\lambda_{PQ}\lambda_{RS}y_{e,Q}y_{e,R}y_{e,S}y_{f,P}^{-1}(A^{-2}y_{f,T} + A^{-4}x_{[\{T\}]} + A^{-6}y_{e,T}^{-1}). \end{align*}
For brevity, we have omitted the set notation in the subscripts of the
 $\lambda$
variables. Proposition 5·5(a) yields the height bounds
$\lambda$
variables. Proposition 5·5(a) yields the height bounds
 $h_{\kappa}(T, P)$
,
$h_{\kappa}(T, P)$
,
 $h_{\kappa}(T, Q)$
,
$h_{\kappa}(T, Q)$
,
 $h_{\kappa}(T, R)$
,
$h_{\kappa}(T, R)$
,
 $h_{\kappa}(T, S) \ge 1$
. Meanwhile, Proposition 5·5(b) and 5·5(c) yield the height bounds
$h_{\kappa}(T, S) \ge 1$
. Meanwhile, Proposition 5·5(b) and 5·5(c) yield the height bounds
 $h_\kappa(P, Q)$
,
$h_\kappa(P, Q)$
,
 $h_\kappa(P, R)$
,
$h_\kappa(P, R)$
,
 $h_\kappa(P, S) \ge 1/2$
and
$h_\kappa(P, S) \ge 1/2$
and
 $h_{\kappa}(T, P)$
,
$h_{\kappa}(T, P)$
,
 $h_{\kappa}(T, Q)$
,
$h_{\kappa}(T, Q)$
,
 $h_{\kappa}(T, R)$
,
$h_{\kappa}(T, R)$
,
 $h_{\kappa}(T, S) \ge 1$
. In this case, the bounds give enough information for a complete description of the height spectrum of
$h_{\kappa}(T, S) \ge 1$
. In this case, the bounds give enough information for a complete description of the height spectrum of
 $\kappa$
.
$\kappa$
.

Fig. 15. An oriented generalised knotoid with five poles P, Q, R, S, T and two constituents e, f.
We remark on the case of generalised knotoids that are not necessarily oriented or fully labelled. Consider an oriented, pole-labelled, constituent-labelled diagram
 ${\mathcal{D}}$
. As we remove orientation or labelling data from
${\mathcal{D}}$
. As we remove orientation or labelling data from
 ${\mathcal{D}}$
, we alter the polynomial
${\mathcal{D}}$
, we alter the polynomial
 $\ll {\mathcal{D}} \gg_*$
accordingly, as follows.
$\ll {\mathcal{D}} \gg_*$
accordingly, as follows.
-
(i) If constituent labels are removed, we re-index the variables
$\{y_{e,P}\}$
by replacing each subscript component
$e \in E({\mathcal{D}})$
with the ordered pair
$(e_0, e_1)$
corresponding to its endpoint poles. -
(ii) If pole labels are removed, we remove
$G_s$
and
$E_s$
from the definition given in Equation (5·1·1), and we re-index the variables
$\{x_U\}$
as follows. For each subscript U, write
$U = [S]$
for a set
$S \subset P({\mathcal{D}})$
, then replace U with the integer
$\min(|S|, |P({\mathcal{D}})| - |S|)$
. -
(iii) If orientation is disregarded, we remove
$E_s$
from the definition given in Equation (5·1·1) and redefine the normalised bracket polynomial by
$\ll {\mathcal{D}} \gg_* = (\!-\!A^3)^{-\sum_{e \in C({\mathcal{D}})}\mathrm{wr}(e)}\ll {\mathcal{D}} \gg$
, where
$\mathrm{wr}(e)$
denotes the sum of the signs of the self-crossings of an arbitrarily-oriented constituent e. (In particular,
$\mathrm{wr}(e)$
is independent of orientation.)













Given an oriented, unlabelled diagram
 ${\mathcal{D}}$
(for example), we obtain the bracket polynomial
${\mathcal{D}}$
(for example), we obtain the bracket polynomial
 $\ll {\mathcal{D}} \gg_*$
by labelling
$\ll {\mathcal{D}} \gg_*$
by labelling
 ${\mathcal{D}}$
arbitrarily and then applying (i) and (ii). (Note that (ii) and (iii) subsume (i).) It is straightforward to verify that, in general, this method yields a bracket polynomial invariant for each class of generalised knotoids with specified labelling and orientation data.
${\mathcal{D}}$
arbitrarily and then applying (i) and (ii). (Note that (ii) and (iii) subsume (i).) It is straightforward to verify that, in general, this method yields a bracket polynomial invariant for each class of generalised knotoids with specified labelling and orientation data.
5·2. Recovering existing bracket polynomials
We survey some existing bracket polynomial constructions for classes of objects subsumed by generalised knotoids and show that they are recovered by the generalised bracket polynomial.
In the case of a classical link diagram L, there are no poles, so all loop constituents of any state s are nullhomotopic and
 $n_0(s)$
is simply the number of constituents of s. Moreover,
$n_0(s)$
is simply the number of constituents of s. Moreover,
 $G_s$
,
$G_s$
,
 $L_s$
, and
$L_s$
, and
 $E_s$
are constant, so
$E_s$
are constant, so
 $\ll L \gg_*$
recovers the traditional bracket polynomial
$\ll L \gg_*$
recovers the traditional bracket polynomial
 $\langle L \rangle$
of the link diagram.
$\langle L \rangle$
of the link diagram.
In [ Reference Gabrovšek and Gügümcü12 ], a bracket polynomial for oriented, ordered (i.e. pole-labelled) multi-linkoids L is defined by
 \[\langle L \rangle_\bullet(A, \{\lambda_{ij}\}) = (\!-\!A^3)^{-\mathrm{wr}(L)}\sum_{s} A^{\sigma(s)}(\!-\!A^2-A^{-2})^{\|s\|}\prod_{\Lambda} \lambda_{ij}.\]
\[\langle L \rangle_\bullet(A, \{\lambda_{ij}\}) = (\!-\!A^3)^{-\mathrm{wr}(L)}\sum_{s} A^{\sigma(s)}(\!-\!A^2-A^{-2})^{\|s\|}\prod_{\Lambda} \lambda_{ij}.\]
Here, the poles of the multi-linkoid are labelled
 $1, 2, \dots, 2n$
, the symbol
$1, 2, \dots, 2n$
, the symbol
 $\Lambda$
indicates that the product is taken over all
$\Lambda$
indicates that the product is taken over all
 $i < j$
such that poles i and j are connected by a segment constituent in s, and
$i < j$
such that poles i and j are connected by a segment constituent in s, and
 $\|s\|$
denotes the number of loop constituents of s. It is clear that
$\|s\|$
denotes the number of loop constituents of s. It is clear that
 $\langle L \rangle_\bullet$
is recovered from
$\langle L \rangle_\bullet$
is recovered from
 $\ll L \gg_*$
by identifying
$\ll L \gg_*$
by identifying
 $G_s$
with
$G_s$
with
 $\prod_{\Lambda}\lambda_{ij}$
and making the substitutions
$\prod_{\Lambda}\lambda_{ij}$
and making the substitutions
 $x_U = -A^2 - A^{-2}$
for all
$x_U = -A^2 - A^{-2}$
for all
 $U \in (2^{P({\mathcal{D}})}/\sim)\setminus [\emptyset]$
and
$U \in (2^{P({\mathcal{D}})}/\sim)\setminus [\emptyset]$
and
 $y_{e, P} = 1$
for all
$y_{e, P} = 1$
for all
 $e \in E(L), P \in P(L)$
.
$e \in E(L), P \in P(L)$
.
In [
Reference Turaev31
], Turaev defines a two-variable bracket polynomial for oriented spherical knotoids. Let K be a spherical knotoid oriented from L to H, and let
 $\alpha = \alpha_{L,H}$
be a shortcut oriented from L to H. (We also use K to denote the segment constituent of the knotoid.) Turaev’s polynomial is given by
$\alpha = \alpha_{L,H}$
be a shortcut oriented from L to H. (We also use K to denote the segment constituent of the knotoid.) Turaev’s polynomial is given by
 \[\ll K \gg_\circ(A, u) = (\!-\!A^3)^{-\mathrm{wr}(K)}\sum_{s}A^{\sigma(s)}(\!-\!A^2 - A^{-2})^{\|s\|}u^{k_s \cdot \alpha - K \cdot \alpha},\]
\[\ll K \gg_\circ(A, u) = (\!-\!A^3)^{-\mathrm{wr}(K)}\sum_{s}A^{\sigma(s)}(\!-\!A^2 - A^{-2})^{\|s\|}u^{k_s \cdot \alpha - K \cdot \alpha},\]
where
 $k_s$
denotes the unique segment constituent of the state s, oriented from L to H. Note that for any state s, the segment constituent
$k_s$
denotes the unique segment constituent of the state s, oriented from L to H. Note that for any state s, the segment constituent
 $k_s$
aligns with K, and all loop constituents of s are nullhomotopic. In terms of the generalised bracket polynomial, the polynomials
$k_s$
aligns with K, and all loop constituents of s are nullhomotopic. In terms of the generalised bracket polynomial, the polynomials
 $G_s = \lambda_{LH}$
and
$G_s = \lambda_{LH}$
and
 $L_s = 1$
are constant, and
$L_s = 1$
are constant, and
 $n_0(s) = \|s\|$
. It follows that
$n_0(s) = \|s\|$
. It follows that
 $\ll K \gg_\circ$
is recovered from
$\ll K \gg_\circ$
is recovered from
 $\ll K \gg_*$
by the substitutions
$\ll K \gg_*$
by the substitutions
 $\lambda_{LH} = 1$
and
$\lambda_{LH} = 1$
and
 $y_{K, H} = u$
. It also follows that the height bound in Proposition 5·5(c) is equivalent to the complexity bound given in [
Reference Turaev31
, equation 8·3·1].
$y_{K, H} = u$
. It also follows that the height bound in Proposition 5·5(c) is equivalent to the complexity bound given in [
Reference Turaev31
, equation 8·3·1].
In [
Reference Turaev31
], Turaev extends
 $\ll K \gg_\circ$
to a bracket polynomial for oriented planar knotoids given by
$\ll K \gg_\circ$
to a bracket polynomial for oriented planar knotoids given by
 \[[K]_\circ(A, B, u) = (\!-\!A^3)^{-\mathrm{wr}(K)} \sum_s A^{\sigma(s)}(\!-\!A^2 - A^{-2})^{p(s)}B^{q(s)}u^{k_s \cdot \alpha - K\cdot \alpha},\]
\[[K]_\circ(A, B, u) = (\!-\!A^3)^{-\mathrm{wr}(K)} \sum_s A^{\sigma(s)}(\!-\!A^2 - A^{-2})^{p(s)}B^{q(s)}u^{k_s \cdot \alpha - K\cdot \alpha},\]
where p(s) denotes the number of loop constituents of s that do not enclose the segment constituent
 $k_s$
and q(s) denotes the number of loop constituents of s that enclose
$k_s$
and q(s) denotes the number of loop constituents of s that enclose
 $k_s$
. Represent K as a generalised knotoid with poles
$k_s$
. Represent K as a generalised knotoid with poles
 $L,H, \infty$
and constituent K oriented from L to H, equipped with shortcuts
$L,H, \infty$
and constituent K oriented from L to H, equipped with shortcuts
 $\{\alpha_{P,Q} \mid P,Q \in \{L, H, \infty\}\}$
, where
$\{\alpha_{P,Q} \mid P,Q \in \{L, H, \infty\}\}$
, where
 $\alpha_{L,H} = \alpha$
. Then
$\alpha_{L,H} = \alpha$
. Then
 $p(s) = n_0(s)$
is simply the number of nullhomotopic loop constituents of s, and
$p(s) = n_0(s)$
is simply the number of nullhomotopic loop constituents of s, and
 $q(s) = n_{[\{\infty\}]}(s)$
is the number of loop constituents of S that determine the bipartition
$q(s) = n_{[\{\infty\}]}(s)$
is the number of loop constituents of S that determine the bipartition
 $\{\{\infty\}, \{L, H\}\}$
. Thus
$\{\{\infty\}, \{L, H\}\}$
. Thus
 $[K]_\circ$
is recoverable from
$[K]_\circ$
is recoverable from
 $\ll K \gg_*$
by the substitutions
$\ll K \gg_*$
by the substitutions
 $\lambda_{LH} = 1$
,
$\lambda_{LH} = 1$
,
 $x_{[\{\infty\}]} = B$
,
$x_{[\{\infty\}]} = B$
,
 $y_{K, \infty} = 1$
, and
$y_{K, \infty} = 1$
, and
 $y_{K, H} = u$
.
$y_{K, H} = u$
.
In [
Reference Kutluay26
], Kutluay refines
 $[K]_\circ$
by replacing the term
$[K]_\circ$
by replacing the term
 $u^{k_s \cdot \alpha - K \cdot \alpha}$
with the term
$u^{k_s \cdot \alpha - K \cdot \alpha}$
with the term
 $\ell^{w_{\gamma_s}(L) - w_\gamma(L)}h^{w_{\gamma_s}(H) - w_\gamma(H)}$
, obtaining a polynomial
$\ell^{w_{\gamma_s}(L) - w_\gamma(L)}h^{w_{\gamma_s}(H) - w_\gamma(H)}$
, obtaining a polynomial
 $[K]_{\bullet}(A,B,\ell, h)$
. Here,
$[K]_{\bullet}(A,B,\ell, h)$
. Here,
 $w_\beta \colon \mathbb R^2 \to \mathbb{Z}/2$
is the winding potential function of an oriented generic closed curve
$w_\beta \colon \mathbb R^2 \to \mathbb{Z}/2$
is the winding potential function of an oriented generic closed curve
 $\beta$
that maps each point
$\beta$
that maps each point
 $x \in \mathbb R^2$
to the winding number of
$x \in \mathbb R^2$
to the winding number of
 $\beta$
around x. (For
$\beta$
around x. (For
 $x \in \beta$
, the winding number is taken to be the average of the winding numbers of the regions adjacent to x.) The closed curve
$x \in \beta$
, the winding number is taken to be the average of the winding numbers of the regions adjacent to x.) The closed curve
 $\gamma$
(resp.
$\gamma$
(resp.
 $\gamma_s$
) is defined by
$\gamma_s$
) is defined by
 $K \cup \alpha^r$
, (resp.
$K \cup \alpha^r$
, (resp.
 $k_s \cup \alpha^r$
), where
$k_s \cup \alpha^r$
), where
 $\alpha^r$
is
$\alpha^r$
is
 $\alpha$
with reversed orientation. Kutluay observes that
$\alpha$
with reversed orientation. Kutluay observes that
 \[k_s \cdot \alpha - K \cdot \alpha = [w_{\gamma_s}(L) - w_\gamma(L)] - [w_{\gamma_s}(H) - w_\gamma(H)],\]
\[k_s \cdot \alpha - K \cdot \alpha = [w_{\gamma_s}(L) - w_\gamma(L)] - [w_{\gamma_s}(H) - w_\gamma(H)],\]
so Turaev’s polynomial
 $[K]_\circ$
is recoverable from Kutluay’s polynomial
$[K]_\circ$
is recoverable from Kutluay’s polynomial
 $[K]_\bullet$
via the substitutions
$[K]_\bullet$
via the substitutions
 $\ell = u$
and
$\ell = u$
and
 $h = u^{-1}$
.
$h = u^{-1}$
.
It is well known that for a generic closed curve
 $\beta$
on the plane and a point
$\beta$
on the plane and a point
 $x \not \in \beta$
, the winding number
$x \not \in \beta$
, the winding number
 $w_\beta(x)$
is given by
$w_\beta(x)$
is given by
 $\beta \cdot \alpha_{x, \infty}$
, where
$\beta \cdot \alpha_{x, \infty}$
, where
 $\alpha_{x,\infty}$
is any path from x to the unbounded region of the plane that intersects
$\alpha_{x,\infty}$
is any path from x to the unbounded region of the plane that intersects
 $\beta$
transversely and away from self-intersections of
$\beta$
transversely and away from self-intersections of
 $\beta$
. Using this fact, it is straightforward to verify that
$\beta$
. Using this fact, it is straightforward to verify that
 \begin{align*} w_{\gamma_s}(L) - w_\gamma(L) &= \gamma_s \cdot \alpha_{L, \infty} - \gamma \cdot \alpha_{L, \infty}\\ &= \mu_{k_s, K}(L, \infty),\end{align*}
\begin{align*} w_{\gamma_s}(L) - w_\gamma(L) &= \gamma_s \cdot \alpha_{L, \infty} - \gamma \cdot \alpha_{L, \infty}\\ &= \mu_{k_s, K}(L, \infty),\end{align*}
and similarly
 \begin{align*} w_{\gamma_s}(H) - w_\gamma(H) &= \mu_{k_s, K}(H, \infty)\\ &= -\mu_{k_s, K}(L, H) + \mu_{k_s, K}(L, \infty).\end{align*}
\begin{align*} w_{\gamma_s}(H) - w_\gamma(H) &= \mu_{k_s, K}(H, \infty)\\ &= -\mu_{k_s, K}(L, H) + \mu_{k_s, K}(L, \infty).\end{align*}
It follows that
 $[K]_\bullet$
is recoverable from
$[K]_\bullet$
is recoverable from
 $\ll K \gg_*$
by the substituions
$\ll K \gg_*$
by the substituions
 $\lambda_{LH} = 1$
,
$\lambda_{LH} = 1$
,
 $x_{[\{\infty\}]} = B$
,
$x_{[\{\infty\}]} = B$
,
 $y_{K, \infty} = \ell h$
, and
$y_{K, \infty} = \ell h$
, and
 $y_{K, H} = h^{-1}$
.
$y_{K, H} = h^{-1}$
.
6. Knotoidal graphs
6·1. Knotoidal graphs
We now define an extension of generalised knotoids. Let
 $\Sigma$
denote a closed orientable surface, and let G be a finite graph. As with generalised knotoids, we do not require G to be connected or simple, and G may have valency-zero vertices. Let
$\Sigma$
denote a closed orientable surface, and let G be a finite graph. As with generalised knotoids, we do not require G to be connected or simple, and G may have valency-zero vertices. Let
 $\tilde{G}$
denote the disjoint union of G with a finite collection of circles. The edges and circles of
$\tilde{G}$
denote the disjoint union of G with a finite collection of circles. The edges and circles of
 $\tilde{G}$
are still called constituents.
$\tilde{G}$
are still called constituents.
A knotoidal graph diagram on
 $\Sigma$
is a pair
$\Sigma$
is a pair
 $(\mathcal{D}, V(\mathcal{D}))$
, where
$(\mathcal{D}, V(\mathcal{D}))$
, where
 $\mathcal{D}$
is a generic immersion of
$\mathcal{D}$
is a generic immersion of
 $\tilde{G}$
in
$\tilde{G}$
in
 $\Sigma$
whose only singularities are transverse double points, called crossings, with over/undercrossing data, and where
$\Sigma$
whose only singularities are transverse double points, called crossings, with over/undercrossing data, and where
 $V(\mathcal{D})$
is a chosen subset of the images of the vertices of G, each of which has valency at least one. We call the elements of
$V(\mathcal{D})$
is a chosen subset of the images of the vertices of G, each of which has valency at least one. We call the elements of
 $V(\mathcal{D})$
the spatial vertices of
$V(\mathcal{D})$
the spatial vertices of
 $\mathcal{D}$
. The images of the remaining vertices of
$\mathcal{D}$
. The images of the remaining vertices of
 $\tilde{G}$
are called poles of
$\tilde{G}$
are called poles of
 $\mathcal{D}$
and the set of poles is denoted by
$\mathcal{D}$
and the set of poles is denoted by
 $P({\mathcal{D}})$
. Figure 16 shows an example.
$P({\mathcal{D}})$
. Figure 16 shows an example.

Fig. 16. A knotoidal graph with three poles and four spatial vertices.
The rest of the terminology for generalised knotoids carries over. we call the graph G (resp.
 $\tilde{G}$
) the underlying graph (resp. underlying looped graph) of
$\tilde{G}$
) the underlying graph (resp. underlying looped graph) of
 $\mathcal{D}$
. The valency of a pole or spatial vertex is the valency of the corresponding vertex in the underlying graph G. Let
$\mathcal{D}$
. The valency of a pole or spatial vertex is the valency of the corresponding vertex in the underlying graph G. Let
 $E({\mathcal{D}})$
denote the set of images of the edges of
$E({\mathcal{D}})$
denote the set of images of the edges of
 $\tilde{G}$
, called segment constituents of
$\tilde{G}$
, called segment constituents of
 $\mathcal{D}$
, and let
$\mathcal{D}$
, and let
 $L(\mathcal{D})$
denote the images of the circles of
$L(\mathcal{D})$
denote the images of the circles of
 $\tilde{G}$
, called loop constituents of
$\tilde{G}$
, called loop constituents of
 ${\mathcal{D}}$
. Let
${\mathcal{D}}$
. Let
 $C({\mathcal{D}}) \;:\!=\; E({\mathcal{D}}) \cup L({\mathcal{D}})$
denote the set of constituents of
$C({\mathcal{D}}) \;:\!=\; E({\mathcal{D}}) \cup L({\mathcal{D}})$
denote the set of constituents of
 ${\mathcal{D}}$
.
${\mathcal{D}}$
.
We consider knotoidal graph diagrams in
 $\Sigma$
up to ambient isotopy and generalised Reidemeister moves: the three standard Reidemeister moves away from poles and spatial vertices, along with the vertex slide move and the vertex twist move near spatial vertices. See Figure 17. The forbidden pole moves of Figure 1 remain in effect. A knotoidal graph KG is an equivalence class of knotoidal graph diagrams. We may speak of knotoidal graphs possibly with labels assigned to poles or spatial vertices, and labels or orientations assigned to constituents.
$\Sigma$
up to ambient isotopy and generalised Reidemeister moves: the three standard Reidemeister moves away from poles and spatial vertices, along with the vertex slide move and the vertex twist move near spatial vertices. See Figure 17. The forbidden pole moves of Figure 1 remain in effect. A knotoidal graph KG is an equivalence class of knotoidal graph diagrams. We may speak of knotoidal graphs possibly with labels assigned to poles or spatial vertices, and labels or orientations assigned to constituents.

Fig. 17. The vertex slide move (top) and the vertex twist move (bottom).
With the vertex twist move, the theory of knotoidal graphs is akin to the theory of spatial graphs with pliable vertices (as opposed to rigid vertices, where the twist move is not allowed). One could require knotoidal graphs to have rigid spatial vertices, which would yield a different theory that we do not consider in this paper.
As we remarked for generalised knotoids, an equivalent theory arises by considering knotoidal graphs in compact surfaces with boundary while disallowing valency-zero poles.
Example 6·1 Generalised knotoids are knotoidal graphs with no spatial vertices.
Example 6·2 Spatial graphs are knotoidal graphs with no poles.
Example 6·3. A graphoid (resp. multi-graphoid) as defined in [
Reference Gügümcü, Gabrovsek and Kauffman16
] is a knotoidal graph with exactly two poles (resp. 2n poles for some
 $n \ge 1$
), each of valency one. A bonded knotoid, used to model bonded proteins [
Reference Goundaroulis, Gügümcü, Lambropoulou, Dorier, Stasiak and Kauffman15
], is particular type of graphoid obtained by adding edges to a knotoid with endpoints at distinct points of the knotoid away from its endpoints. So all resulting spatial vertices have valency three.
$n \ge 1$
), each of valency one. A bonded knotoid, used to model bonded proteins [
Reference Goundaroulis, Gügümcü, Lambropoulou, Dorier, Stasiak and Kauffman15
], is particular type of graphoid obtained by adding edges to a knotoid with endpoints at distinct points of the knotoid away from its endpoints. So all resulting spatial vertices have valency three.
6·2. Rail diagrams
A topological perspective on knotoids is introduced in [
Reference Kodokostas and Lambropoulou25
] by means of rail diagrams. For planar knotoids, consider the thickened disk
 $D^2 \times I$
together with two distinct lines
$D^2 \times I$
together with two distinct lines
 $\ell_1 = \{x\} \times I, \ell_2 = \{y\} \times I$
, called rails. A planar rail diagram is a proper embedding of an arc into
$\ell_1 = \{x\} \times I, \ell_2 = \{y\} \times I$
, called rails. A planar rail diagram is a proper embedding of an arc into
 $(D^2 \times I) \setminus \;{} ^{^{^{\circ\!\!\!\!\!\!}}}\mathring{N}\;(\ell_1 \cup \ell_2)$
such that one endpoint is embedded in
$(D^2 \times I) \setminus \;{} ^{^{^{\circ\!\!\!\!\!\!}}}\mathring{N}\;(\ell_1 \cup \ell_2)$
such that one endpoint is embedded in
 $\partial N(\ell_1)$
and one is embedded in
$\partial N(\ell_1)$
and one is embedded in
 $\partial N(\ell_2)$
, as shown in Figure 18. We consider planar rail diagrams up to isotopies of the embedded arc in
$\partial N(\ell_2)$
, as shown in Figure 18. We consider planar rail diagrams up to isotopies of the embedded arc in
 $(D^2 \times I) \setminus\;{} ^{^{^{\circ\!\!\!\!\!\!}}}\mathring{N}\;(\ell_1 \cup \ell_2)$
. Intuitively, the removal of the rails has the effect of topologically enforcing the forbidden move for knotoid diagrams. It is shown in [
Reference Kodokostas and Lambropoulou25
] that the theory of planar rail diagrams is equivalent to the theory of planar knotoids, and if the disk
$(D^2 \times I) \setminus\;{} ^{^{^{\circ\!\!\!\!\!\!}}}\mathring{N}\;(\ell_1 \cup \ell_2)$
. Intuitively, the removal of the rails has the effect of topologically enforcing the forbidden move for knotoid diagrams. It is shown in [
Reference Kodokostas and Lambropoulou25
] that the theory of planar rail diagrams is equivalent to the theory of planar knotoids, and if the disk
 $D^2$
is replaced by an arbitrary surface
$D^2$
is replaced by an arbitrary surface
 $\Sigma$
, the arguments in [
Reference Kodokostas and Lambropoulou25
] generalise readily to show that the theory of
$\Sigma$
, the arguments in [
Reference Kodokostas and Lambropoulou25
] generalise readily to show that the theory of
 $\Sigma$
-rail diagrams is equivalent to the theory of knotoids on
$\Sigma$
-rail diagrams is equivalent to the theory of knotoids on
 $\Sigma$
.
$\Sigma$
.

Fig. 18. A planar rail diagram for a knotoid.
We extend
 $\Sigma$
-rail diagrams to knotoidal graphs. For a given knotoidal graph KG in
$\Sigma$
-rail diagrams to knotoidal graphs. For a given knotoidal graph KG in
 $\Sigma$
with diagram
$\Sigma$
with diagram
 $\mathcal{D}$
, take the thickened surface
$\mathcal{D}$
, take the thickened surface
 $\Sigma \times I$
and n distinct rails
$\Sigma \times I$
and n distinct rails
 $\ell_i = \{x_i\} \times I$
,
$\ell_i = \{x_i\} \times I$
,
 $i = 1, \dotsc, n$
, where
$i = 1, \dotsc, n$
, where
 $n = |P(\mathcal{D})|$
, each rail corresponding to a pole
$n = |P(\mathcal{D})|$
, each rail corresponding to a pole
 $p_i$
. Let
$p_i$
. Let
 $\tilde{G}'$
be the graph obtained from the underlying looped graph
$\tilde{G}'$
be the graph obtained from the underlying looped graph
 $\tilde{G}$
of
$\tilde{G}$
of
 $\mathcal{D}$
by removing a disk neighbourhood of each pole. Then for each pole
$\mathcal{D}$
by removing a disk neighbourhood of each pole. Then for each pole
 $p_i$
there are
$p_i$
there are
 $v(p_i)$
endpoints in
$v(p_i)$
endpoints in
 $\tilde{G}'$
created by removing the disk neighbourhood. Now properly embed
$\tilde{G}'$
created by removing the disk neighbourhood. Now properly embed
 $\tilde{G}'$
in
$\tilde{G}'$
in
 $(\Sigma \times I) \setminus \;{} ^{^{^{\circ\!\!\!\!\!\!}}}\mathring{N}\;(\bigcup_{i = 1}^n \ell_i)$
so that the projection of the embedding to
$(\Sigma \times I) \setminus \;{} ^{^{^{\circ\!\!\!\!\!\!}}}\mathring{N}\;(\bigcup_{i = 1}^n \ell_i)$
so that the projection of the embedding to
 $\Sigma \times \{0\}$
recovers
$\Sigma \times \{0\}$
recovers
 $\mathcal{D}$
away from the poles, and so the
$\mathcal{D}$
away from the poles, and so the
 $v(p_i)$
endpoints of
$v(p_i)$
endpoints of
 $\tilde{G}'$
are embedded on the boundary
$\tilde{G}'$
are embedded on the boundary
 $\partial N(\ell_i)$
of the corresponding rail neighbourhood.
$\partial N(\ell_i)$
of the corresponding rail neighbourhood.
Again, we consider these diagrams up to isotopies of the embedded looped graph in
 $(\Sigma \times I) \setminus \;{} ^{^{^{\circ\!\!\!\!\!\!}}}\mathring{N}\;(\bigcup_{i = 1}^n \ell_i)$
, with one major difference. We may identify the cylindrical boundary portion of each
$(\Sigma \times I) \setminus \;{} ^{^{^{\circ\!\!\!\!\!\!}}}\mathring{N}\;(\bigcup_{i = 1}^n \ell_i)$
, with one major difference. We may identify the cylindrical boundary portion of each
 $\partial N(\ell_i)$
with
$\partial N(\ell_i)$
with
 $S^1 \times I$
. If an endpoint v of
$S^1 \times I$
. If an endpoint v of
 $\tilde{G}'$
is embedded as the point (x, t) in
$\tilde{G}'$
is embedded as the point (x, t) in
 $\partial N(\ell_i)$
, then we require the isotopies to keep v in the vertical line segment
$\partial N(\ell_i)$
, then we require the isotopies to keep v in the vertical line segment
 $\{x\} \times I$
. That is, we only allow endpoints of the graph
$\{x\} \times I$
. That is, we only allow endpoints of the graph
 $\tilde{G}'$
embedded in rail neighbourhoods to slide vertically up and down. This prevents arbitrary twisting near poles, which we disallow in the diagrammatic theory of knotoidal graphs.
$\tilde{G}'$
embedded in rail neighbourhoods to slide vertically up and down. This prevents arbitrary twisting near poles, which we disallow in the diagrammatic theory of knotoidal graphs.
The theory of
 $\Sigma$
-rail diagrams of knotoidal graphs is equivalent to the theory of knotoidal graphs in
$\Sigma$
-rail diagrams of knotoidal graphs is equivalent to the theory of knotoidal graphs in
 $\Sigma$
. Consequently, we may derive invariants of knotoidal graphs using topological methods, as we do in Section 7.
$\Sigma$
. Consequently, we may derive invariants of knotoidal graphs using topological methods, as we do in Section 7.
Although we do not address it here, one can also allow virtual crossings in a spherical or planar knotoidal graph. This would generate classical knotoidal graphs in surfaces as we have described, however, in this theory, different projections can generate surfaces of different genus and equivalence between diagrams must then allow adding and removing handles for the corresponding surfaces. See [ Reference Gügümcü, Kauffman and Pongtanapaisan19 ] for this theory as applied to graphoids.
7. Hyperbolicity for knotoidal graphs
We review the notion of hyperbolicity for knotoids, studied in [
Reference Adams, Bonat, Chande, Chen, Jiang, Romrell, Santiago, Shapiro and Woodruff2
]. Two maps
 $\phi_{S^2}^D$
and
$\phi_{S^2}^D$
and
 $\phi_{S^2}^G$
are defined in [
Reference Adams, Bonat, Chande, Chen, Jiang, Romrell, Santiago, Shapiro and Woodruff2
], each sending a spherical knotoid to a knot in the thickened torus
$\phi_{S^2}^G$
are defined in [
Reference Adams, Bonat, Chande, Chen, Jiang, Romrell, Santiago, Shapiro and Woodruff2
], each sending a spherical knotoid to a knot in the thickened torus
 $T \times (0, 1)$
. Two maps
$T \times (0, 1)$
. Two maps
 $\phi_{\mathbb{R}^2}^D$
and
$\phi_{\mathbb{R}^2}^D$
and
 $\phi_{\mathbb{R}^2}^G$
are also defined in [
Reference Adams, Bonat, Chande, Chen, Jiang, Romrell, Santiago, Shapiro and Woodruff2
], each sending a planar knotoid to a knot in the genus three handlebody
$\phi_{\mathbb{R}^2}^G$
are also defined in [
Reference Adams, Bonat, Chande, Chen, Jiang, Romrell, Santiago, Shapiro and Woodruff2
], each sending a planar knotoid to a knot in the genus three handlebody
 $H_3$
or to a knot in the genus two handlebody
$H_3$
or to a knot in the genus two handlebody
 $H_2$
, respectively.
$H_2$
, respectively.
The map
 $\phi_{S^2}^D$
is termed the spherical reflected doubling map and is defined as follows.
$\phi_{S^2}^D$
is termed the spherical reflected doubling map and is defined as follows.
Definition 7·1. Consider a spherical rail diagram for a knotoid k, namely a thickened cylinder
 $M = S^2 \times (0, 1) \setminus \;{} ^{^{^{\circ\!\!\!\!\!\!}}}\mathring{N}\;(\ell_1 \cup \ell_2)$
with an embedded arc, where each
$M = S^2 \times (0, 1) \setminus \;{} ^{^{^{\circ\!\!\!\!\!\!}}}\mathring{N}\;(\ell_1 \cup \ell_2)$
with an embedded arc, where each
 $\ell_i = \{x_i\} \times (0, 1)$
is a rail. Let
$\ell_i = \{x_i\} \times (0, 1)$
is a rail. Let
 $C_i = \partial N(\ell_i)$
denote the boundaries of the regular neighbourhoods of the rails, which are homeomorphic to annuli and are each punctured once by the knotoid (we may take the neighbourhoods to be sufficiently small so that this is true). Label the punctures by
$C_i = \partial N(\ell_i)$
denote the boundaries of the regular neighbourhoods of the rails, which are homeomorphic to annuli and are each punctured once by the knotoid (we may take the neighbourhoods to be sufficiently small so that this is true). Label the punctures by
 $z_i$
. Take a reflected copy
$z_i$
. Take a reflected copy
 $M^R$
of M which contains reflected copies
$M^R$
of M which contains reflected copies
 $C_i^R$
of the rail boundaries and copies
$C_i^R$
of the rail boundaries and copies
 $z'_{\!\!i}$
of the punctures. Then we glue together M and
$z'_{\!\!i}$
of the punctures. Then we glue together M and
 $M^R$
by gluing
$M^R$
by gluing
 $C_1$
to
$C_1$
to
 $C_1^R$
and
$C_1^R$
and
 $C_2$
to
$C_2$
to
 $C_2^R$
via a reflection as appears in Figure 19. This yields a well-defined knot K in the thickened torus
$C_2^R$
via a reflection as appears in Figure 19. This yields a well-defined knot K in the thickened torus
 $T \times (0, 1)$
. We then set
$T \times (0, 1)$
. We then set
 $\phi_{S^2}^D$
to
$\phi_{S^2}^D$
to
 $K \in \mathcal{K}(T^2 \times (0, 1))$
.
$K \in \mathcal{K}(T^2 \times (0, 1))$
.

Fig. 19. The construction for a generalised knotoid or knotoidal graph.
We say that k is hyperbolic if K is hyperbolic in
 $T \times (0, 1)$
, that is,
$T \times (0, 1)$
, that is,
 $(T \times (0, 1)) \setminus N(K)$
admits a complete hyperbolic metric. We define the volume of k, denoted
$(T \times (0, 1)) \setminus N(K)$
admits a complete hyperbolic metric. We define the volume of k, denoted
 ${\mathrm{Vol}}_{S^2}(k)$
, to be half the volume of
${\mathrm{Vol}}_{S^2}(k)$
, to be half the volume of
 $(T \times (0, 1)) \setminus N(K)$
.
$(T \times (0, 1)) \setminus N(K)$
.
7·1. Hyperbolicity for knotoidal graphs
We extend the domain of the map
 $\phi_{S^2}^D$
to knotoidal graphs.
$\phi_{S^2}^D$
to knotoidal graphs.
Definition 7·2. Consider a spherical rail diagram for a knotoidal graph KG in
 $S^2$
. Denote by
$S^2$
. Denote by
 $\ell_1, \dotsc, \ell_m$
the rails corresponding to nonzero-valency poles
$\ell_1, \dotsc, \ell_m$
the rails corresponding to nonzero-valency poles
 $p_1, \dotsc, p_m$
, and denote by
$p_1, \dotsc, p_m$
, and denote by
 $\ell_{m+1}, \dotsc, \ell_{n}$
the rails corresponding to valency-zero poles. Let
$\ell_{m+1}, \dotsc, \ell_{n}$
the rails corresponding to valency-zero poles. Let
 $C_i$
be the boundary of
$C_i$
be the boundary of
 $N(\ell_i)$
for
$N(\ell_i)$
for
 $i = 1, \dotsc, m$
; we may choose the regular neighbourhoods to be sufficiently small such that each
$i = 1, \dotsc, m$
; we may choose the regular neighbourhoods to be sufficiently small such that each
 $C_i$
is punctured exactly
$C_i$
is punctured exactly
 $v(p_i)$
times, where
$v(p_i)$
times, where
 $v(p_i)$
is the valency of the pole
$v(p_i)$
is the valency of the pole
 $p_i$
. Let M be the manifold
$p_i$
. Let M be the manifold
 $(S^2 \times I) \setminus N(\bigcup_{i = 1}^n \ell_i)$
, and take a reflected copy
$(S^2 \times I) \setminus N(\bigcup_{i = 1}^n \ell_i)$
, and take a reflected copy
 $M^R$
which contains reflected copies
$M^R$
which contains reflected copies
 $C_i^R$
of the rail boundaries. Then glue together M and
$C_i^R$
of the rail boundaries. Then glue together M and
 $M^R$
by gluing
$M^R$
by gluing
 $C_i$
to
$C_i$
to
 $C_i^R$
via reflection for
$C_i^R$
via reflection for
 $i = 1, \dotsc, m$
, so that the punctures in the
$i = 1, \dotsc, m$
, so that the punctures in the
 $C_i$
and
$C_i$
and
 $C_i^R$
line up. Note that we do not glue the boundaries corresponding to valency-zero poles, and if there are no poles of nonzero valency, then we do not take a reflected copy, leaving us with just M.
$C_i^R$
line up. Note that we do not glue the boundaries corresponding to valency-zero poles, and if there are no poles of nonzero valency, then we do not take a reflected copy, leaving us with just M.
This process yields a spatial graph
 $\mathcal{G}$
in a manifold Y. If there are no valency-zero poles, then Y is homeomorphic to a thickened closed orientable surface of genus
$\mathcal{G}$
in a manifold Y. If there are no valency-zero poles, then Y is homeomorphic to a thickened closed orientable surface of genus
 $m - 1$
. Otherwise, Y is homeomorphic to a handlebody of genus
$m - 1$
. Otherwise, Y is homeomorphic to a handlebody of genus
 $m + (m - 1) + 2(n - m - 1) = 2n - 3$
when
$m + (m - 1) + 2(n - m - 1) = 2n - 3$
when
 $n - m > 1$
: each valency-zero pole after the first one increases the genus by two. If there is exactly one valency-zero pole, then Y is homeomorphic to a handlebody of genus
$n - m > 1$
: each valency-zero pole after the first one increases the genus by two. If there is exactly one valency-zero pole, then Y is homeomorphic to a handlebody of genus
 $m + (m - 1) = 2m - 1$
. Hence, we obtain an extension of the spherical reflected doubling map
$m + (m - 1) = 2m - 1$
. Hence, we obtain an extension of the spherical reflected doubling map
 $\phi_{S^2}^D$
to knotoidal graphs. It associates to every knotoidal graph in
$\phi_{S^2}^D$
to knotoidal graphs. It associates to every knotoidal graph in
 $S^2$
a spatial graph in a 3-manifold Y, and we write
$S^2$
a spatial graph in a 3-manifold Y, and we write
 $\phi_{S^2}^D(KG) = (\mathcal{G}, Y)$
.
$\phi_{S^2}^D(KG) = (\mathcal{G}, Y)$
.
When restricted to spherical knotoids (knotoidal graphs with two poles and a single segment constituent between them), the map
 $\phi_{S^2}^D$
agrees with the map given in Definition 7·1, justifying the notation. Similarly, when restricted to planar knotoids (knotoidal graphs with three poles and a single segment constituent between two of them), the map
$\phi_{S^2}^D$
agrees with the map given in Definition 7·1, justifying the notation. Similarly, when restricted to planar knotoids (knotoidal graphs with three poles and a single segment constituent between two of them), the map
 $\phi_{S^2}^D$
is precisely the planar reflected doubling map
$\phi_{S^2}^D$
is precisely the planar reflected doubling map
 $\phi_{\mathbb{R}^2}^D \;:\; \mathbb{K}(\mathbb{R}^2) \to \mathcal{K}(H_3)$
defined in [
Reference Adams, Bonat, Chande, Chen, Jiang, Romrell, Santiago, Shapiro and Woodruff2
].
$\phi_{\mathbb{R}^2}^D \;:\; \mathbb{K}(\mathbb{R}^2) \to \mathcal{K}(H_3)$
defined in [
Reference Adams, Bonat, Chande, Chen, Jiang, Romrell, Santiago, Shapiro and Woodruff2
].
Note that we can also extend this definition to knotoidal graphs on a general closed orientable projection surface
 $\Sigma$
, by replacing every occurrence of
$\Sigma$
, by replacing every occurrence of
 $S^2$
in Definition 7·2 with
$S^2$
in Definition 7·2 with
 $\Sigma$
. Again, we obtain a spatial graph
$\Sigma$
. Again, we obtain a spatial graph
 $\mathcal{G}$
in a manifold Y, and we denote the map associating
$\mathcal{G}$
in a manifold Y, and we denote the map associating
 $(\mathcal{G}, Y)$
to KG by
$(\mathcal{G}, Y)$
to KG by
 $\phi_{\Sigma}^D$
. If
$\phi_{\Sigma}^D$
. If
 $\Sigma$
has genus g and there are no valency-zero poles, then Y is homeomorphic to a thickened closed orientable surface of genus
$\Sigma$
has genus g and there are no valency-zero poles, then Y is homeomorphic to a thickened closed orientable surface of genus
 $2g + m - 1$
. Otherwise, Y is homeomorphic to a handlebody of genus
$2g + m - 1$
. Otherwise, Y is homeomorphic to a handlebody of genus
 $(2g + m - 1) + 2(n - m) = 2g + 2n - m - 1$
. We can now define hyperbolicity for knotoidal graphs on any closed orientable projection surface
$(2g + m - 1) + 2(n - m) = 2g + 2n - m - 1$
. We can now define hyperbolicity for knotoidal graphs on any closed orientable projection surface
 $\Sigma$
.
$\Sigma$
.
Definition 7·3. Let KG be a knotoidal graph in a closed orientable surface
 $\Sigma$
. Then we say KG is hyperbolic if its image
$\Sigma$
. Then we say KG is hyperbolic if its image
 $\phi_{\Sigma}^D(KG) = (\mathcal{G}, Y)$
under the
$\phi_{\Sigma}^D(KG) = (\mathcal{G}, Y)$
under the
 $\Sigma$
-reflected doubling map is tg-hyperbolic. That is, the manifold
$\Sigma$
-reflected doubling map is tg-hyperbolic. That is, the manifold
 $Y \setminus N(\mathcal{G})$
admits a complete hyperbolic metric such that its higher genus boundary components are totally geodesic in the metric.
$Y \setminus N(\mathcal{G})$
admits a complete hyperbolic metric such that its higher genus boundary components are totally geodesic in the metric.
We require the stronger condition of tg-hyperbolicity on
 $Y \setminus N(\mathcal{G})$
to guarantee that it has a well-defined, finite hyperbolic volume.
$Y \setminus N(\mathcal{G})$
to guarantee that it has a well-defined, finite hyperbolic volume.
Definition 7·4. Let KG be a hyperbolic knotoidal graph in
 $S^2$
, and let
$S^2$
, and let
 $(\mathcal{G}, Y)$
be its image under
$(\mathcal{G}, Y)$
be its image under
 $\phi_{S^2}^D$
with a tg-hyperbolic metric. Then the hyperbolic volume
$\phi_{S^2}^D$
with a tg-hyperbolic metric. Then the hyperbolic volume
 ${\mathrm{Vol}}(KG)$
of KG is defined as
${\mathrm{Vol}}(KG)$
of KG is defined as
 $$ {\mathrm{Vol}}(KG) \;:\!=\; \frac{1}{2} {\mathrm{Vol}}(Y \setminus N(\mathcal{G})).$$
$$ {\mathrm{Vol}}(KG) \;:\!=\; \frac{1}{2} {\mathrm{Vol}}(Y \setminus N(\mathcal{G})).$$
We remark that hyperbolic volume does not distinguish between a knotoidal graph KG and the knotoidal graph obtained by applying a pole twist move at a pole of KG since the reflected doubling operation “undoes” the twist. (However, the polynomial invariants for generalised knotoids defined in Sections 4 and 5 may detect twists.)
7·2. Staked links
We defined staked links in Example 2·8. Given any link L with projection on a closed orientable surface
 $\Sigma$
, we may stake it by adding any number of valency-zero poles to its diagram, and we refer to these poles as stakes. By means of their rail diagrams, staked links are equivalent to links in handlebodies.
$\Sigma$
, we may stake it by adding any number of valency-zero poles to its diagram, and we refer to these poles as stakes. By means of their rail diagrams, staked links are equivalent to links in handlebodies.
We would like to consider when staked links are hyperbolic. As a simple example, let L be a link with diagram on
 $\Sigma = S^2$
. Suppose L ′ is a staked link obtained by adding a single stake to the diagram of L. If
$\Sigma = S^2$
. Suppose L ′ is a staked link obtained by adding a single stake to the diagram of L. If
 $(\mathcal{G}, Y)$
is the image of L ′ under
$(\mathcal{G}, Y)$
is the image of L ′ under
 $\phi_{S^2}^D$
, then Y is just a 3-ball and
$\phi_{S^2}^D$
, then Y is just a 3-ball and
 $\mathcal{G}$
is a link so that
$\mathcal{G}$
is a link so that
 $\mathcal{G}$
in Y is equivalent to L in
$\mathcal{G}$
in Y is equivalent to L in
 $S^2 \times I$
under the correspondence between links in
$S^2 \times I$
under the correspondence between links in
 $S^3$
and links in
$S^3$
and links in
 $S^2 \times I$
. In particular, a 1-staked link L ′ obtained from
$S^2 \times I$
. In particular, a 1-staked link L ′ obtained from
 $L \subset S^2 \times I$
is hyperbolic if and only if L is hyperbolic. Contrast this with 1-polar links: they are never hyperbolic since there is always an essential annulus in
$L \subset S^2 \times I$
is hyperbolic if and only if L is hyperbolic. Contrast this with 1-polar links: they are never hyperbolic since there is always an essential annulus in
 $Y \setminus N(\mathcal{G})$
.
$Y \setminus N(\mathcal{G})$
.
As another example, let L be a link with diagram
 $\mathcal{D}$
on
$\mathcal{D}$
on
 $\Sigma = S^2$
, and suppose L ′ is a staked link obtained by adding two stakes to the diagram of L. If
$\Sigma = S^2$
, and suppose L ′ is a staked link obtained by adding two stakes to the diagram of L. If
 $(\mathcal{G}, Y)$
is the image of L ′ under
$(\mathcal{G}, Y)$
is the image of L ′ under
 $\phi_{S^2}^D$
, then the complement
$\phi_{S^2}^D$
, then the complement
 $Y \setminus N(\mathcal{G})$
is homeomorphic to the complement of a link L ′′ in
$Y \setminus N(\mathcal{G})$
is homeomorphic to the complement of a link L ′′ in
 $S^3$
obtained by adding an unknotted component to L in the following way: let
$S^3$
obtained by adding an unknotted component to L in the following way: let
 $p_1$
and
$p_1$
and
 $p_2$
denote points on
$p_2$
denote points on
 $S^2$
where the stakes are added, and add two arcs to the diagram
$S^2$
where the stakes are added, and add two arcs to the diagram
 $\mathcal{D}$
with endpoints on
$\mathcal{D}$
with endpoints on
 $p_1$
and
$p_1$
and
 $p_2$
such that one arc crosses over every strand of
$p_2$
such that one arc crosses over every strand of
 $\mathcal{D}$
it meets and the other crosses under every strand it meets. This yields a new link diagram
$\mathcal{D}$
it meets and the other crosses under every strand it meets. This yields a new link diagram
 $\mathcal{D}''$
. Then L ′ is hyperbolic if and only if L ′′ is hyperbolic. See Figure 20 for an example.
$\mathcal{D}''$
. Then L ′ is hyperbolic if and only if L ′′ is hyperbolic. See Figure 20 for an example.
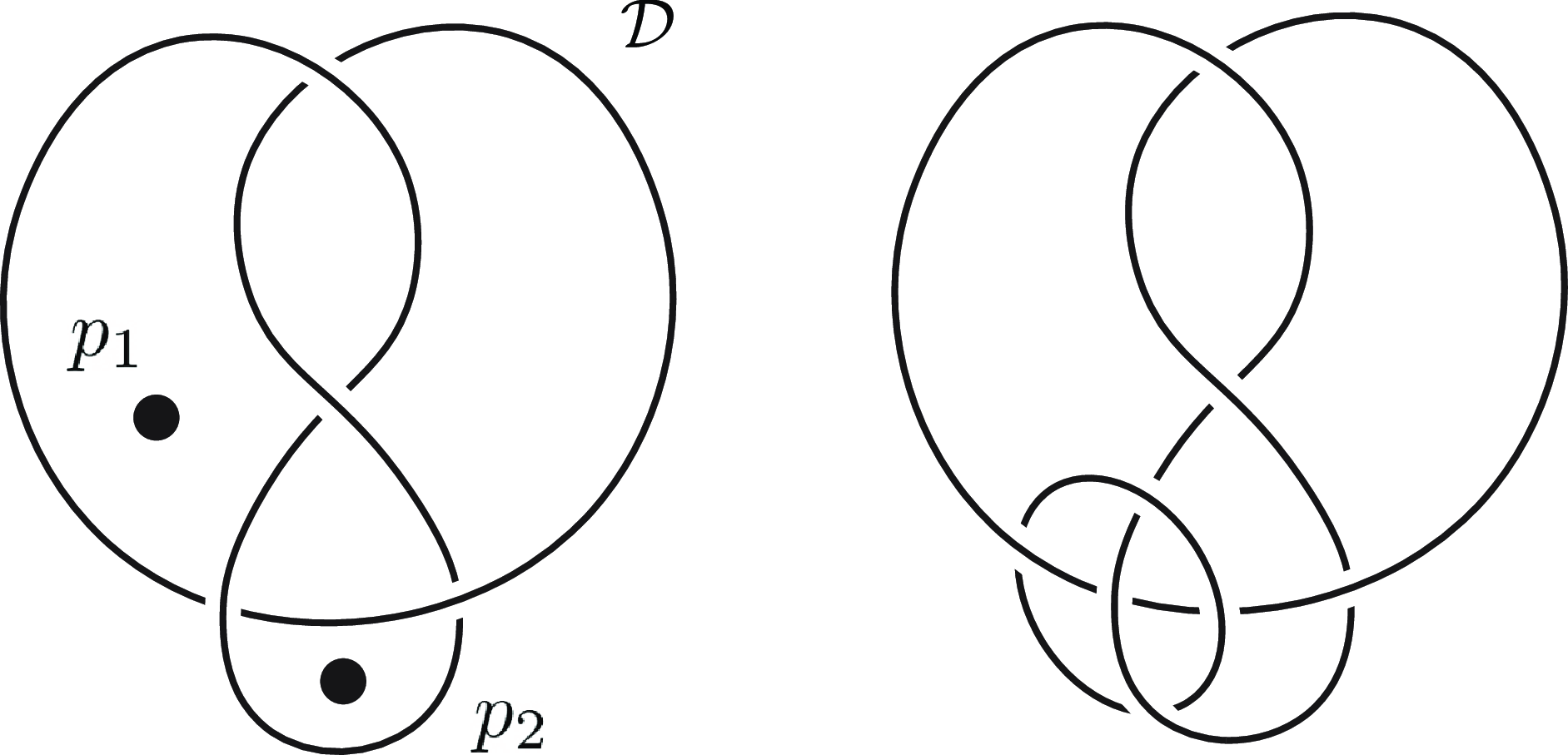
Fig. 20. Adding two stakes to a link diagram on
 $S^2$
is equivalent to adding an unknot component.
$S^2$
is equivalent to adding an unknot component.
Observe that when
 $p_1$
and
$p_1$
and
 $p_2$
are in distinct, non-adjacent regions, then L ′′ is obtained by augmenting L as in [
Reference Adams1
]. When L is a prime, non-split, alternating link which is not a 2-braid, Theorem 2·1 from [
Reference Adams1
] shows that such a 2-staked link L ′′ is hyperbolic.
$p_2$
are in distinct, non-adjacent regions, then L ′′ is obtained by augmenting L as in [
Reference Adams1
]. When L is a prime, non-split, alternating link which is not a 2-braid, Theorem 2·1 from [
Reference Adams1
] shows that such a 2-staked link L ′′ is hyperbolic.
More generally, if L has a cellular alternating diagram on
 $\Sigma$
, then we can determine precisely when a staked link L ′ obtained by staking the diagram of L is hyperbolic.
$\Sigma$
, then we can determine precisely when a staked link L ′ obtained by staking the diagram of L is hyperbolic.
Definition 7·5 Let
 $\Sigma$
be a closed, orientable surface, and let
$\Sigma$
be a closed, orientable surface, and let
 $L \subset \Sigma \times I$
be a staked link with diagram
$L \subset \Sigma \times I$
be a staked link with diagram
 $\mathcal{D}$
. We say L is weakly prime if every disk
$\mathcal{D}$
. We say L is weakly prime if every disk
 $D \subset \Sigma$
containing at least one crossing of
$D \subset \Sigma$
containing at least one crossing of
 $\mathcal{D}$
such that the circle
$\mathcal{D}$
such that the circle
 $\partial D$
intersects
$\partial D$
intersects
 $\mathcal{D}$
transversely in two points also contains at least one stake in its interior in a complementary region that does not touch
$\mathcal{D}$
transversely in two points also contains at least one stake in its interior in a complementary region that does not touch
 $\partial D$
.
$\partial D$
.
Definition 7·6. Let
 $\Sigma$
be a closed, orientable surface and let
$\Sigma$
be a closed, orientable surface and let
 $\mathcal{D}$
be a projection diagram for a link L in
$\mathcal{D}$
be a projection diagram for a link L in
 $\Sigma$
. We say
$\Sigma$
. We say
 $\mathcal{D}$
is cellular if every complementary region in
$\mathcal{D}$
is cellular if every complementary region in
 $\Sigma \setminus \mathcal{D}$
is a disk.
$\Sigma \setminus \mathcal{D}$
is a disk.
Then Theorem 1·6 from [ Reference Adams and Chen4 ], stated below in the language of stakes, allows us to determine whether or not a staking yields a hyperbolic staked link.
Proposition 7·7. Let
 $\Sigma$
be a closed projection surface, and let
$\Sigma$
be a closed projection surface, and let
 $L \subset \Sigma \times I$
be a link with a connected, reduced, cellular alternating projection diagram
$L \subset \Sigma \times I$
be a link with a connected, reduced, cellular alternating projection diagram
 $\mathcal{D} \subset \Sigma \times \{1/2\}$
with at least one crossing. Let L’ be a staked link obtained by staking
$\mathcal{D} \subset \Sigma \times \{1/2\}$
with at least one crossing. Let L’ be a staked link obtained by staking
 $\mathcal{D}$
, and let
$\mathcal{D}$
, and let
 $\mathcal{D}'$
be the reduced diagram for L’ in
$\mathcal{D}'$
be the reduced diagram for L’ in
 $\Sigma$
. Let
$\Sigma$
. Let
 $M = (\Sigma \times I) \setminus N(L)$
. Then M is tg-hyperbolic if and only if the following four conditions are satisfied:
$M = (\Sigma \times I) \setminus N(L)$
. Then M is tg-hyperbolic if and only if the following four conditions are satisfied:
-
(i)
$\mathcal{D}'$
is weakly prime on
$\Sigma \times \{1/2\}$
; -
(ii) every complementary region of
$\Sigma \setminus \mathcal{D}'$
contains at most one stake; -
(iii) adjacent regions of
$\Sigma \setminus \mathcal{D}'$
do not both contain stakes; -
(iv) there is no simple closed curve
$\alpha$
in
$\Sigma$
that intersects
$\mathcal{D}'$
exactly in a nonempty collection of crossings, such that for each such crossing,
$\alpha$
bisects the crossing and the two opposite complementary regions meeting at that crossing that do not intersect
$\alpha$
near that crossing are staked.









These conditions are all relatively easy to check directly on the diagram
 $\mathcal{D}'$
.
$\mathcal{D}'$
.
Proof. As in the remarks following the definitions of generalised knotoids and knotoidal graphs, adding a stake to a link diagram
 $\mathcal{D}$
on
$\mathcal{D}$
on
 $\Sigma$
is equivalent to removing an open disk neighbourhood of
$\Sigma$
is equivalent to removing an open disk neighbourhood of
 $\Sigma$
. Hence, we can view
$\Sigma$
. Hence, we can view
 $\mathcal{D}'$
as a link diagram on a compact surface
$\mathcal{D}'$
as a link diagram on a compact surface
 $\Sigma'$
with boundary. Then the proposition is a restatement of [
Reference Adams and Chen4
, theorem 1·6 and corollary 1·7].
$\Sigma'$
with boundary. Then the proposition is a restatement of [
Reference Adams and Chen4
, theorem 1·6 and corollary 1·7].
This proposition gives us a large class of hyperbolic staked links. The following theorem uses it to show that an even larger class is hyperbolic. We say a projection of a link on a surface is checkerboard-colourable if we can shade a subset of the complementary regions so that no two adjacent regions are both shaded or both unshaded. This is equivalent to the fact that every simple closed curve that intersects the projection transversely away from the crossings does so an even number of times.
Theorem 7·8. Let
 $\Sigma$
be a closed, orientable surface and let
$\Sigma$
be a closed, orientable surface and let
 $L \subset \Sigma \times I$
be a link with a projection diagram
$L \subset \Sigma \times I$
be a link with a projection diagram
 $\mathcal{D}$
that is checkerboard-colourable. Then there exists another projection
$\mathcal{D}$
that is checkerboard-colourable. Then there exists another projection
 $\mathcal{D}'$
of L such that
$\mathcal{D}'$
of L such that
 $\mathcal{D}'$
can be staked so that the resulting staked link is hyperbolic.
$\mathcal{D}'$
can be staked so that the resulting staked link is hyperbolic.
Proof. Given our projection
 $\mathcal{D}$
, we first apply Type II Reidemeister moves to make it connected. We then apply further Type II Reidemeister moves to make it cellular and weakly prime. None of these moves change the fact it is checkerboard-colourable. We can also ensure that there are multiple crossings.
$\mathcal{D}$
, we first apply Type II Reidemeister moves to make it connected. We then apply further Type II Reidemeister moves to make it cellular and weakly prime. None of these moves change the fact it is checkerboard-colourable. We can also ensure that there are multiple crossings.
For any such projection on a closed surface, we can always find a subset of the crossings to change in order to make it alternating. We see this by checkerboard shading the complementary regions and then changing crossings so each shaded region is oriented clockwise with respect to the overcrossings and each unshaded region is oriented counterclockwise with respect to the overcrossings.
Although we do not need this, we can always change at most half the crossings, since initially, if we need to change more than half, we can instead just change the complementary crossings.
As we will see, it is enough to stake a pair of opposite regions at a crossing to allow us to change it. However, at this stage, we cannot stake accordingly at each crossing we wish to change as this can either create adjacent staked regions from different crossings, or it can create a simple closed curve
 $\alpha$
that fails condition (iv) of Proposition 7·7. So instead, at each of the crossings we desire to change, we apply the move to the projection that appears in Figure 21. This move is obtained by applying a swirl move that appears twice in [
Reference Adams, Brock, Bugbee, Comar, Faigin, Huston, Joseph and Pesikoff3
, figure 8]. This yields a new projection
$\alpha$
that fails condition (iv) of Proposition 7·7. So instead, at each of the crossings we desire to change, we apply the move to the projection that appears in Figure 21. This move is obtained by applying a swirl move that appears twice in [
Reference Adams, Brock, Bugbee, Comar, Faigin, Huston, Joseph and Pesikoff3
, figure 8]. This yields a new projection
 $\mathcal{D}'$
.
$\mathcal{D}'$
.
In order to make the corresponding projection alternating, the crossing highlighted in red becomes the one we need to change. To do so, we stake each of the regions in the diagram as shown that are opposite one another and adjacent to the new crossing.
Note that in the resulting diagram, no two staked regions are adjacent. Furthermore, there can be no simple closed curve
 $\alpha$
that bisects crossings in the projection and is staked in a pair opposite regions it does not pass through at each crossing. This is because when
$\alpha$
that bisects crossings in the projection and is staked in a pair opposite regions it does not pass through at each crossing. This is because when
 $\alpha$
passes through such an appropriately staked crossing, the other crossings that are in the region
$\alpha$
passes through such an appropriately staked crossing, the other crossings that are in the region
 $\alpha$
just entered do not have the requisite stakes to either side for
$\alpha$
just entered do not have the requisite stakes to either side for
 $\alpha$
to exit.
$\alpha$
to exit.
Now that we have staked two opposite regions at a crossing we want to change, we see a twice-punctured disk F in
 $\Sigma \times I$
intersecting the link at the crossing as in Figure 22.
$\Sigma \times I$
intersecting the link at the crossing as in Figure 22.

Fig. 21. For a crossing we want to change, we apply a swirl move twice and then stake with two stakes.

Fig. 22. Staking two opposite regions near a crossing; crossing the arc
 $\alpha$
by I yields the twice-punctured disk
$\alpha$
by I yields the twice-punctured disk
 $F = \alpha \times I$
in
$F = \alpha \times I$
in
 $\Sigma \times I$
, shown on the right.
$\Sigma \times I$
, shown on the right.
We can cut along F, yielding copies
 $F_1$
and
$F_1$
and
 $F_2$
, rotate copy
$F_2$
, rotate copy
 $F_2$
by
$F_2$
by
 $2 \pi$
, and reglue the two copies back together, changing the crossing to the opposite crossing. This is a homeomorphism of M so the resulting link in the handlebody
$2 \pi$
, and reglue the two copies back together, changing the crossing to the opposite crossing. This is a homeomorphism of M so the resulting link in the handlebody
 $\Sigma' \times I$
is hyperbolic if and only if the original link is hyperbolic. Upon applying this move to the crossings we need to change, we obtain a staked projection that is cellular alternating and weakly prime. We can now apply Proposition 7·7.
$\Sigma' \times I$
is hyperbolic if and only if the original link is hyperbolic. Upon applying this move to the crossings we need to change, we obtain a staked projection that is cellular alternating and weakly prime. We can now apply Proposition 7·7.
Corollary 7·9. Every link L in
 $S^2 \times I$
has a diagram that can be staked so that the resulting staked link is hyperbolic.
$S^2 \times I$
has a diagram that can be staked so that the resulting staked link is hyperbolic.
Proof. Every link diagram in
 $S^2$
is checkerboard-colourable. So, this follows immediately from the theorem.
$S^2$
is checkerboard-colourable. So, this follows immediately from the theorem.
Definition 7·10. We define the staked volume of a link L in
 $\Sigma \times I$
, where
$\Sigma \times I$
, where
 $\Sigma$
is a closed surface, to be the minimum volume over all diagrams
$\Sigma$
is a closed surface, to be the minimum volume over all diagrams
 $\mathcal{D}$
of L in
$\mathcal{D}$
of L in
 $\Sigma \times \{1/2\}$
of staked links obtained by adding stakes to
$\Sigma \times \{1/2\}$
of staked links obtained by adding stakes to
 $\mathcal{D}$
so that the result is hyperbolic.
$\mathcal{D}$
so that the result is hyperbolic.
Note that this is well-defined because hyperbolic volumes are known to be well-ordered. By Corollary 7·9, we may associate a finite staked volume to every link in
 $S^3$
, including links that are not hyperbolic in the classical sense. In this regard, staked volume is similar to Turaev volume as defined in [
Reference Adams, Eisenberg, Kapoor, Greenberg, Liang, O’Connor, Pacheco-Tallaj and Wang5
].
$S^3$
, including links that are not hyperbolic in the classical sense. In this regard, staked volume is similar to Turaev volume as defined in [
Reference Adams, Eisenberg, Kapoor, Greenberg, Liang, O’Connor, Pacheco-Tallaj and Wang5
].
Example 7·11 The staked volume of the trivial knot in
 $S^3$
is
$S^3$
is
 $ 3.6638 \dots$
, and it is achieved by the staking configuration in Figure 23(a). To see this, observe that for any staked link on
$ 3.6638 \dots$
, and it is achieved by the staking configuration in Figure 23(a). To see this, observe that for any staked link on
 $S^2$
with exactly two stakes, its volume as a knotoidal graph is computed as the volume of a link complement in the solid torus. In particular, this is a 2-cusped manifold. In [
Reference Agol6
], Agol proved that the minimum volume of a 2-cusped manifold is
$S^2$
with exactly two stakes, its volume as a knotoidal graph is computed as the volume of a link complement in the solid torus. In particular, this is a 2-cusped manifold. In [
Reference Agol6
], Agol proved that the minimum volume of a 2-cusped manifold is
 $ 3.6638 \dots$
. Hence, this must be the minimum volume of any staked diagram of the trivial knot with two stakes. Any diagram of the trivial knot with one stake is isotopic to the trivial diagram with one stake, which yields a trivial knot in the 3-sphere, which is not hyperbolic. Any diagram of the trivial knot with three or more stakes yields a knot in a handlebody of genus at least two. However, for this to be tg-hyperbolic, the boundary must be totally geodesic and by Theorem 5·2 of [
Reference Miyamoto29
], we know that any manifold with totally geodesic boundary must have volume at least
$ 3.6638 \dots$
. Hence, this must be the minimum volume of any staked diagram of the trivial knot with two stakes. Any diagram of the trivial knot with one stake is isotopic to the trivial diagram with one stake, which yields a trivial knot in the 3-sphere, which is not hyperbolic. Any diagram of the trivial knot with three or more stakes yields a knot in a handlebody of genus at least two. However, for this to be tg-hyperbolic, the boundary must be totally geodesic and by Theorem 5·2 of [
Reference Miyamoto29
], we know that any manifold with totally geodesic boundary must have volume at least
 $3.6638\dots$
and if it has volume exactly
$3.6638\dots$
and if it has volume exactly
 $3.6638\dots$
, it cannot be the complement of a knot or link in a handlebody.
$3.6638\dots$
, it cannot be the complement of a knot or link in a handlebody.
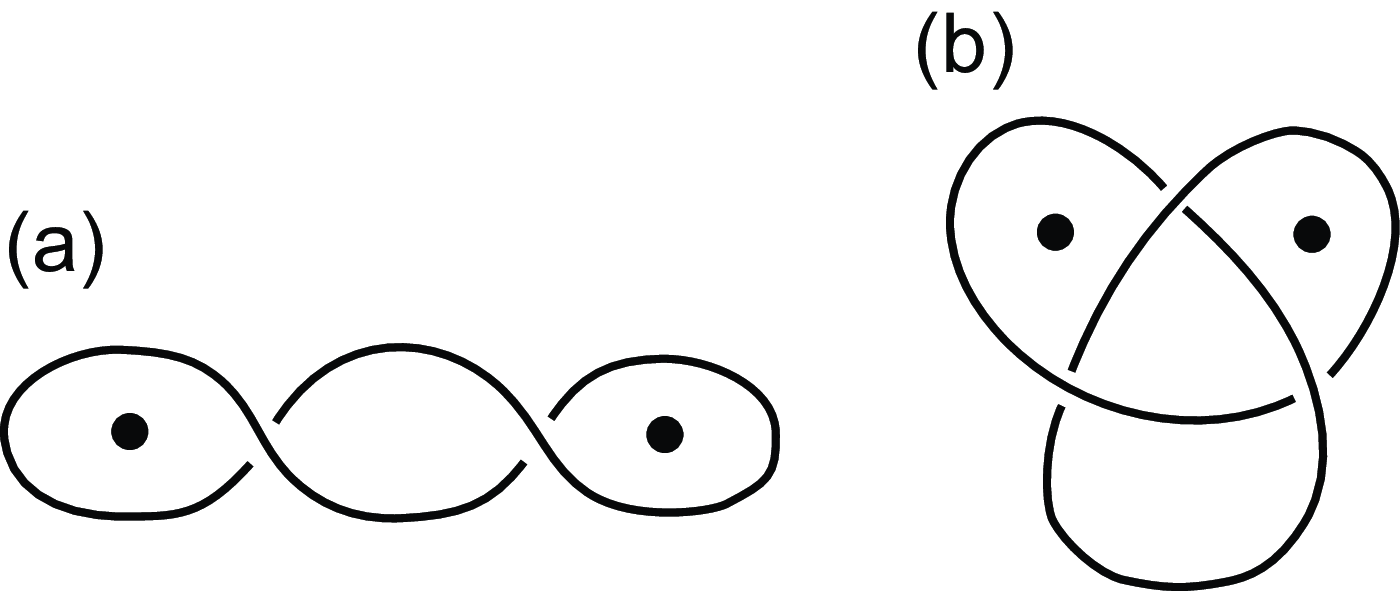
Fig. 23. Staked diagrams of the unknot and trefoil realising the minimum volume over all staked diagrams.
Example 7·12. The staked volume of the trefoil knot in
 $S^3$
is also
$S^3$
is also
 $3.6638 \dots$
, and it is achieved by the staking configuration in Figure 23(b). Similarly to Example 7·11, it is the minimum volume of any staked diagram of the trefoil with exactly two stakes. As in the previous example, one stake will not make it hyperbolic and three or more stakes will cause it volume to be larger.
$3.6638 \dots$
, and it is achieved by the staking configuration in Figure 23(b). Similarly to Example 7·11, it is the minimum volume of any staked diagram of the trefoil with exactly two stakes. As in the previous example, one stake will not make it hyperbolic and three or more stakes will cause it volume to be larger.
Example 7·13. For any twist knot other than the trefoil knot, its staked volume is its hyperbolic volume. If we use one stake, then removing the corresponding rail from
 $S^2 \times I$
yields the link in a ball, and capping that ball with another ball yields the knot in
$S^2 \times I$
yields the link in a ball, and capping that ball with another ball yields the knot in
 $S^3$
, with volume the original hyperbolic volume of the knot. If we utilise two stakes, the result will be the complement of a 2-component link in
$S^3$
, with volume the original hyperbolic volume of the knot. If we utilise two stakes, the result will be the complement of a 2-component link in
 $S^3$
, which by [
Reference Agol6
] has volume at least
$S^3$
, which by [
Reference Agol6
] has volume at least
 $3.6638\dots$
. In fact there is a 2-pole staking for each twist knot that yields this volume. However, every twist knot comes from Dehn filling the Whitehead link, which has this volume, and Dehn filling always lowers volume, so the volume from one stake is strictly less than the volume from two stakes. And exactly as in the last two examples, the volume from three or more stakes is strictly greater than
$3.6638\dots$
. In fact there is a 2-pole staking for each twist knot that yields this volume. However, every twist knot comes from Dehn filling the Whitehead link, which has this volume, and Dehn filling always lowers volume, so the volume from one stake is strictly less than the volume from two stakes. And exactly as in the last two examples, the volume from three or more stakes is strictly greater than
 $3.6638\dots$
.
$3.6638\dots$
.
With this, we end our discussion of generalised knotoids and knotoidal graphs. There are many interesting questions that remain to be explored.
Acknowledgements
The research was supported by Williams College and NSF Grant DMS-1947438 supporting the SMALL Undergraduate Research Project. Thanks to the referee for helpful comments.





















































