



1. Introduction
Unmanned aerial vehicle (UAV) is a kind of airplane without human pilots on board [Reference Kose, Oktay and Özen1]. In recent decades, benefiting from the development of intelligence science and technology, the UAV has the advantage of flexibility, high safety, and low cost compared with the manned vehicle, showing great potential in military and civilian fields, such as reconnaissance, surveillance, rescue, and search in various complex environments [Reference Saadi, Soukane, Meraihi, Gabis, Mirjalili and Ramdane-Cherif2–Reference Xiao, Zhang, Wu, Han, Ding and Han5]. Generally speaking, as shown in Fig. 1, path planning targets at offering an appropriate path from the starting point to the goal point, simultaneously avoiding the obstacles and meeting the requirements [Reference Zhao, Zheng and Liu6–Reference He, Qi and Liu8], e.g., time, energy [Reference Liu, Huang, Liu, Guo, Wang and Tan9], and distance, which is one of the critical technologies determining the autonomy level of UAV in performing a mission.

Figure 1. An example for UAV path planning.
Over the past few years, many scholars have done a lot of research and put forward a variety of methods for UAV path planning [Reference Oktay and Sal10]. Graph-based algorithms, such as probabilistic roadmaps algorithm [Reference Kavraki, Kolountzakis and Latombe11], A star algorithm [Reference Chen, Zhang, Hu and Xiao12], rapidly exploring random trees based algorithms [Reference Zammit and van Kampen13], are a kind of path planning method, converting the search area into a graph and regarding the grid cell as a node in the graph structure [Reference Shao, Peng, He and Du14]. Regular grids are often applied in the environmental model, but they are inappropriate in the larger area environment due to high memory and computation and low precision. To eliminate the shortcomings of regular grids, Shah and Gupta employed quadtree to improve the computing efficiency of A star on visibility graph nodes [Reference Shah and Gupta15]. Lee et al. applied the Dijkstra algorithm to obtain the path, using the quadtree-based graph that is generated by the quadtree structure [Reference Lee, Choi and Kim16]. Potential field-based method is a class of effective path planning method, and artificial potential field method regards the target and obstacle as the attractive field and repulsive field, respectively, pulling the UAV to move toward the destination and away from obstacles to obtain a proper path [Reference Di, Zhou and Duan17]. To solve the problem that this algorithm is easy to get stuck at the local optimum, Sun et al. integrated the distance factor and jump strategy into artificial potential field, avoiding the local minimum [Reference Sun, Tang and Lao18]. Considering that the UAV moves very quickly and cannot fly to a specific location and stop moving, Woods and La put forward an extended potential field controller, utilizing the relative velocity rather than position between the UAV and a target or obstacles [Reference Woods and La19].
Artificial neural network is inspired by the biological neural network and can be considered as an information processing system composed of interconnected neurons, having learning and reasoning ability [Reference Gao, Niu, Wei, Liu, Wang, Zhu, Dong and Sun20–Reference Kose and Oktay23]. One of the challenges for online path planning is that only limited information is detected in the real-time environment, Liu et al. designed a residual convolutional neural network-based method to predict the optimal path of similar scenarios, by learning the optimal paths in the offline scenarios [Reference Liu, Zheng, Qin, Zhang and Yao24]. For tracking errors generated by ignoring the UAV trajectory tracking controller, Liu et al. put forward a trajectory mapping network-based control oriented highly feasible path planning method [Reference Liu, Wang, Fan, Wu and Wu25]. Different from the artificial neural network with learning ability, fuzzy logic mainly takes expert experience and knowledge as the core of reasoning and decision making. Adjusting the parameters of member functions and rules in fuzzy logic needs lots of trial and error, Sathyan et al. designed a genetic fuzzy clustering for path planning, adopting the genetic algorithm to rectify the parameters in fuzzy logic [Reference Sathyan, Ernest and Cohen26]. To determine the parameters of differential evolution in path planning, Adhikari et al. put forward a fuzzy adaptive differential evolution, transforming the path planning problem into a multiobjective optimization and applying fuzzy logic to optimize the parameters of differential evolution [Reference Adhikari, Kim and Reza27]. Evolutionary algorithm, with the guidance of the principles of evolution and natural genetics, is a kind of random search and optimization technology and successfully solves various engineering problems [Reference Dai, Li, Chen, Nie, Rui and Zhang28–Reference S. and R.31]. For path planning in a disaster situation, a novel dynamic group-based cooperative optimization algorithm for UAV path planning is proposed by Qadir et al, considering the distance between the start point, control point, and end point [Reference Qadir, Zafar, Moosavi, Le and Mahmud32]. To get over the disadvantages of existing algorithms, such as falling into local optimal solutions and slow convergence speed, Yu et al. invented a novel hybrid particle swarm optimization for UAV path planning, combining simulated annealing algorithm to improve algorithm performance [Reference Yu, Si, Li, Wang and Song33].
There are many mature researches on two-dimensional (2D) path planning [Reference Dai, Yu, Zhang, Zhan and Zheng34, Reference Xie, Zhang, Jiang and Liu35], and some simple three-dimensional (3D) path planning problems can indeed be dealt with 2D path planning algorithm, overlooking some important information, e.g., flight altitude, pitch angle, and height of obstacle, However, in complex 3D space, more constraints and spatial information should be considered to ensure the optimality and feasibility of the path. For a complex optimization problem, these heuristic algorithms, e.g., moth flame optimization algorithm, are prone to fall into local minima and have the problem of slow convergence rates. Although gravitational search algorithm has some advantages over other heuristic algorithms, the standard gravitational search algorithm still has a few issues, e.g., no effective acceleration mechanism and poor local search ability [Reference Li and Duan36, Reference Su and Wang37]. Therefore, a 3D path planning method based on enhanced gravitational search algorithm (EGSA) is put forward in this paper. The path length, yaw angle, pitch angle, and flight height are taken into account in path planning, and the memory and random disturbance are adopted to enhance the balance ability of exploration and exploitation for EGSA. The main contributions and innovations are as follows:
1) EGSA is proposed. Each particle in the population has the memory ability and random disturbance ability to improve the performance of the algorithm, and the performance is illustrated by comparing EGSA with seven peer algorithms on CEC 2020 benchmark functions. Moreover, the effect of acceleration, memory ability of particle, and random disturbance are also carefully analyzed.
2) A path planning method is put forward, considering the path length, yaw angle, pitch angle, and flight altitude for the UAV. The performance of the method is tested and analyzed in simple and complex environments.
3) The effect of population size on path planning is explained, determining the population size by the path planning results and computing resource.
The structure of this paper is organized as follows: The preliminaries, including gravitational search algorithm (GSA) and chaotic tent map, are introduced in Section 2. Section 3 explains the proposed algorithm EGSA for 3D path planning in detail. Subsequently, the experimental settings and results are given in Section 4. Finally, the conclusions and future works are elaborated in the last section.
2. Preliminaries
In this section, the description of the gravitation search algorithm and chaotic tent map is introduced, respectively.
2.1. Gravitational search algorithm
Gravitational search algorithm, proposed by Rashedi et al. in 2009, is inspired by the law of gravity and motion [Reference Rashedi, Nezamabadi-pour and Saryazdi38, Reference Jiao, Chen, Xin, Li, Zheng and Zhao39]. The solutions are viewed as particles, interacting with each other and moving in
 $D$
dimensional search space, whose performance is estimated by the mass. The better the particle, the greater mass. Under the action of universal gravitation, the particles will move toward the particle with a large mass, approaching the optimal solution. The flowchart of GSA is presented in Fig. 2.
$D$
dimensional search space, whose performance is estimated by the mass. The better the particle, the greater mass. Under the action of universal gravitation, the particles will move toward the particle with a large mass, approaching the optimal solution. The flowchart of GSA is presented in Fig. 2.
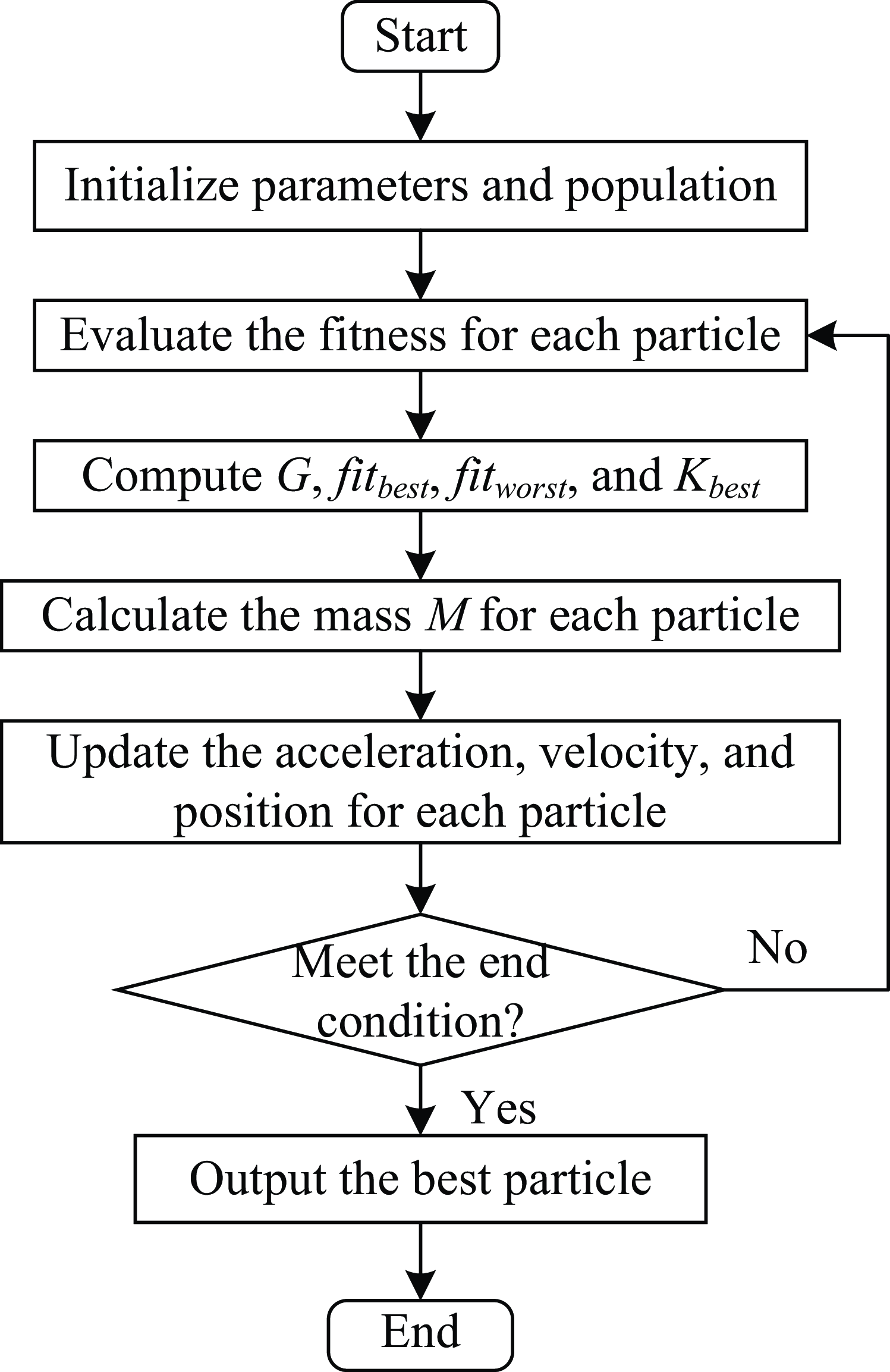
Figure 2. The flowchart of GSA.
Assume that there are
 $N$
particles in
$N$
particles in
 $D$
dimensional space, whose positions and velocities are described as Eqs. (1) and (2).
$D$
dimensional space, whose positions and velocities are described as Eqs. (1) and (2).
 \begin{equation} X_{i}(t)=\left(x_{i}^{1}(t),x_{i}^{2}(t),\ldots,x_{i}^{d}(t),\ldots,x_{i}^{D}(t)\right), i=1,2,\ldots,N\end{equation}
\begin{equation} X_{i}(t)=\left(x_{i}^{1}(t),x_{i}^{2}(t),\ldots,x_{i}^{d}(t),\ldots,x_{i}^{D}(t)\right), i=1,2,\ldots,N\end{equation}
 \begin{equation} V_{i}(t)=\left(v_{i}^{1}(t),v_{i}^{2}(t),\ldots,v_{i}^{d}(t),\ldots,v_{i}^{D}(t)\right), i=1,2,\ldots,N\end{equation}
\begin{equation} V_{i}(t)=\left(v_{i}^{1}(t),v_{i}^{2}(t),\ldots,v_{i}^{d}(t),\ldots,v_{i}^{D}(t)\right), i=1,2,\ldots,N\end{equation}
The mass
 $M_{i}(t)$
of particle
$M_{i}(t)$
of particle
 $X_{i}(t)$
is related to its fitness, for a minimization problem, mass can be calculated by Eqs. (3)-(6):
$X_{i}(t)$
is related to its fitness, for a minimization problem, mass can be calculated by Eqs. (3)-(6):
 \begin{equation} M_{i}(t)=\frac{m_{i}(t)}{\sum _{j=1}^{N}m_{j}(t)}\end{equation}
\begin{equation} M_{i}(t)=\frac{m_{i}(t)}{\sum _{j=1}^{N}m_{j}(t)}\end{equation}
 \begin{equation} m_{i}(t)=\frac{fit_{i}(t)-fit_{\textit{worst}}(t)}{fit_{best}(t)-fit_{\textit{worst}}(t)} \end{equation}
\begin{equation} m_{i}(t)=\frac{fit_{i}(t)-fit_{\textit{worst}}(t)}{fit_{best}(t)-fit_{\textit{worst}}(t)} \end{equation}
 \begin{equation} fit_{best}(t)=\mathit{\min }_{i\in \left\{1,\ldots,N\right\}} fit_{i}(t) \end{equation}
\begin{equation} fit_{best}(t)=\mathit{\min }_{i\in \left\{1,\ldots,N\right\}} fit_{i}(t) \end{equation}
 \begin{equation} fit_{\textit{worst}}(t)=\mathit{\max }_{i\in \left\{1,\ldots,N\right\}} fit_{i}(t) \end{equation}
\begin{equation} fit_{\textit{worst}}(t)=\mathit{\max }_{i\in \left\{1,\ldots,N\right\}} fit_{i}(t) \end{equation}
where
 $t$
stands for the number of iterations and
$t$
stands for the number of iterations and
 $fit_{i}(t)$
represents the fitness of the particle
$fit_{i}(t)$
represents the fitness of the particle
 $X_{i}(t)$
.
$X_{i}(t)$
.
As the role of gravity, at each generation
 $t$
, the force
$t$
, the force
 $F_{ij}(t)$
between particle
$F_{ij}(t)$
between particle
 $X_{i}(t)$
and
$X_{i}(t)$
and
 $X_{j}(t)$
can be defined as follows:
$X_{j}(t)$
can be defined as follows:
 \begin{equation} F_{ij}^{d}(t)=G(t)\frac{M_{i}(t)\cdot M_{j}(t)}{R_{ij}(t)+\varepsilon }\left(x_{j}^{d}(t)-x_{i}^{d}(t)\right) \end{equation}
\begin{equation} F_{ij}^{d}(t)=G(t)\frac{M_{i}(t)\cdot M_{j}(t)}{R_{ij}(t)+\varepsilon }\left(x_{j}^{d}(t)-x_{i}^{d}(t)\right) \end{equation}
where
 $R_{ij}(t)$
denotes the Euclidean distance between the particle
$R_{ij}(t)$
denotes the Euclidean distance between the particle
 $X_{i}(t)$
and
$X_{i}(t)$
and
 $X_{j}(t) ; \varepsilon$
is a constant, preventing the dominator from being 0.
$X_{j}(t) ; \varepsilon$
is a constant, preventing the dominator from being 0.
 $G(t)$
represents the gravitational constant, which can adjust the gravity and be described as Eq. (8):
$G(t)$
represents the gravitational constant, which can adjust the gravity and be described as Eq. (8):
 \begin{equation} G(t)=G_{0}e^{-\alpha \frac{t}{T}} \end{equation}
\begin{equation} G(t)=G_{0}e^{-\alpha \frac{t}{T}} \end{equation}
where
 $G_{0}$
refers to the initial gravitational constant,
$G_{0}$
refers to the initial gravitational constant,
 $\alpha$
is the adaptive adjustment coefficient, and
$\alpha$
is the adaptive adjustment coefficient, and
 $T$
represents the maximum iterations.
$T$
represents the maximum iterations.
To improve the performance of the algorithm, the total force acting on the particle
 $X_{i}(t)$
from the top
$X_{i}(t)$
from the top
 $K$
best particles is defined as follows:
$K$
best particles is defined as follows:
 \begin{equation} F_{i}^{d}(t)=\sum _{j\in K_{best}, j\neq i}rand_{j}F_{ij}^{d}(t) \end{equation}
\begin{equation} F_{i}^{d}(t)=\sum _{j\in K_{best}, j\neq i}rand_{j}F_{ij}^{d}(t) \end{equation}
where
 $K_{best}$
is the set storing the top
$K_{best}$
is the set storing the top
 $K$
best particles, decreasing linearly over iterations;
$K$
best particles, decreasing linearly over iterations;
 $rand_{j}$
stands for a random value between 0 and 1.
$rand_{j}$
stands for a random value between 0 and 1.
According to the law of motion, the acceleration
 $a$
of the particle
$a$
of the particle
 $X_{i}(t)$
can be achieved by Eq. (10), using its mass and resultant force.
$X_{i}(t)$
can be achieved by Eq. (10), using its mass and resultant force.
 \begin{equation} a_{i}^{d}(t)=\frac{F_{i}^{d}(t)}{M_{i}(t)} \end{equation}
\begin{equation} a_{i}^{d}(t)=\frac{F_{i}^{d}(t)}{M_{i}(t)} \end{equation}
Finally, the position
 $x_{i}^{d}(t)$
and velocity
$x_{i}^{d}(t)$
and velocity
 $v_{i}^{d}(t)$
of the
$v_{i}^{d}(t)$
of the
 $i\mathrm{th}$
particle can be updated by Eqs. (11) and (12), respectively.
$i\mathrm{th}$
particle can be updated by Eqs. (11) and (12), respectively.
 \begin{equation} v_{i}^{d}\!\left(t+1\right)=rand_{i}\cdot v_{i}^{d}(t)+a_{i}^{d}(t) \end{equation}
\begin{equation} v_{i}^{d}\!\left(t+1\right)=rand_{i}\cdot v_{i}^{d}(t)+a_{i}^{d}(t) \end{equation}
 \begin{equation} x_{i}^{d}\!\left(t+1\right)=x_{i}^{d}(t)+v_{i}^{d}\!\left(t+1\right) \end{equation}
\begin{equation} x_{i}^{d}\!\left(t+1\right)=x_{i}^{d}(t)+v_{i}^{d}\!\left(t+1\right) \end{equation}
where
 $rand_{i}$
is a random value within the interval [0, 1].
$rand_{i}$
is a random value within the interval [0, 1].
2.2. Tent map
The tent map is one of the noninvertible and piecewise linear discrete maps [Reference Yang, Liu, Wang and Yang40], which is given by Eq. (13).
 \begin{equation} ch_{t+1}=f\!\left(ch_{t}\right)=\begin{cases} \dfrac{ch_{t}}{a}, 0\leq ch_{t}\leq a\\[10pt] \dfrac{1-ch_{t}}{1-a}, a\lt ch_{t}\leq 1 \end{cases} \end{equation}
\begin{equation} ch_{t+1}=f\!\left(ch_{t}\right)=\begin{cases} \dfrac{ch_{t}}{a}, 0\leq ch_{t}\leq a\\[10pt] \dfrac{1-ch_{t}}{1-a}, a\lt ch_{t}\leq 1 \end{cases} \end{equation}
where
 $a$
is referred to as the control parameter, and
$a$
is referred to as the control parameter, and
 $ch_{t}$
represents the output chaotic sequence. Figure 3 characters the orbit of the tent map during the iteration, and the maximal value is obtained at
$ch_{t}$
represents the output chaotic sequence. Figure 3 characters the orbit of the tent map during the iteration, and the maximal value is obtained at
 $ch_{t}=0.7$
.
$ch_{t}=0.7$
.
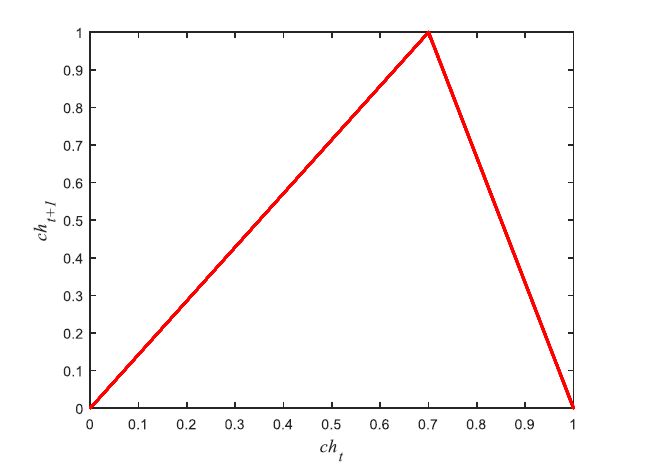
Figure 3.
The tent map, in a case at
 $a=0.7$
.
$a=0.7$
.
3. Proposed method
This section first gives the environment model and defines the overall cost function. Then the proposed path planning algorithm is described. Finally, the computational complexity of EGSA is analyzed.
3.1. Modeling the environment
Suppose,
 $S$
and
$S$
and
 $T$
are the start and terminal points of the task for a UAV, whose corresponding coordinates are
$T$
are the start and terminal points of the task for a UAV, whose corresponding coordinates are
 $(x_{1}, y_{1},z_{1})$
and
$(x_{1}, y_{1},z_{1})$
and
 $(x_{D}, y_{D},z_{D})$
, respectively. The coordinates of
$(x_{D}, y_{D},z_{D})$
, respectively. The coordinates of
 $S$
and
$S$
and
 $T$
in 3D space are the main objects to be considered, just as shown in Fig. 4, ignoring the obstacles in the environment.
$T$
in 3D space are the main objects to be considered, just as shown in Fig. 4, ignoring the obstacles in the environment.
 $D-1$
equal parts are got by evenly dividing
$D-1$
equal parts are got by evenly dividing
 $[x_{1},x_{D}]$
along the
$[x_{1},x_{D}]$
along the
 $X$
-axis, the vertical planes
$X$
-axis, the vertical planes
 $(\beta _{1},\beta _{2},\ldots,\beta _{d},\ldots,\beta _{D})$
that are perpendicular to
$(\beta _{1},\beta _{2},\ldots,\beta _{d},\ldots,\beta _{D})$
that are perpendicular to
 $X$
-axis are attained according to the points
$X$
-axis are attained according to the points
 $(x_{1},x_{2},\ldots,x_{d},\ldots,x_{D})$
in the
$(x_{1},x_{2},\ldots,x_{d},\ldots,x_{D})$
in the
 $X$
-axis. The point
$X$
-axis. The point
 $P_{d}=(x_{d},y_{d},z_{d})$
is taken from the plane
$P_{d}=(x_{d},y_{d},z_{d})$
is taken from the plane
 $\beta _{d}$
. A path in three-dimensional space can be achieved by connecting these points
$\beta _{d}$
. A path in three-dimensional space can be achieved by connecting these points
 $(P_{1},\ldots,P_{d},\ldots,P_{D})$
in turn, which can be described as
$(P_{1},\ldots,P_{d},\ldots,P_{D})$
in turn, which can be described as
 $P=\{S,(x_{2},y_{2},z_{2}),\ldots,(x_{d},y_{d},z_{d}),\ldots,(x_{D-1},y_{D-1},z_{D-1}),T\}$
. Generally, the division method in
$P=\{S,(x_{2},y_{2},z_{2}),\ldots,(x_{d},y_{d},z_{d}),\ldots,(x_{D-1},y_{D-1},z_{D-1}),T\}$
. Generally, the division method in
 $X$
-axis can also be revised to fulfill our needs.
$X$
-axis can also be revised to fulfill our needs.
Figure 4. The three-dimensional environmental model.

Figure 5. Performance constraints of UAV.
The optimal path problem can be transformed into optimizing a coordinate sequence to satisfy constraints and minimize the objective function in 3D space. Since some coordinates are set in advance and too large variable dimension would magnify the computational complexity, the path variable
 $P$
can be expressed as
$P$
can be expressed as
 $P=(y_{2},z_{2},y_{3},z_{3},\ldots,y_{d},z_{d},\ldots,y_{D-1},z_{D-1})$
, reducing
$P=(y_{2},z_{2},y_{3},z_{3},\ldots,y_{d},z_{d},\ldots,y_{D-1},z_{D-1})$
, reducing
 $D-2$
variables.
$D-2$
variables.
3.2. Cost function
When performing a task, time and energy consumption are two important factors to be considered, which are bound up with the path length. The greater the path length, the more time and energy required, and vice versa. So, the path length is a very critical factor in the optimal path, which can be described as follows:
 \begin{equation} F_{1}=\sum _{d=1}^{D-1}F_{1}^{d} \end{equation}
\begin{equation} F_{1}=\sum _{d=1}^{D-1}F_{1}^{d} \end{equation}
 \begin{equation} F_{1}^{d}=\sqrt{\left(x_{d}-x_{d+1}\right)^{2}+\left(y_{d}-y_{d+1}\right)^{2}+\left(z_{d}-z_{d+1}\right)^{2}} \end{equation}
\begin{equation} F_{1}^{d}=\sqrt{\left(x_{d}-x_{d+1}\right)^{2}+\left(y_{d}-y_{d+1}\right)^{2}+\left(z_{d}-z_{d+1}\right)^{2}} \end{equation}
where
 $F_{1}^{d}$
denotes the Euclidean distance between the node
$F_{1}^{d}$
denotes the Euclidean distance between the node
 $d$
and its next node
$d$
and its next node
 $d+1$
,
$d+1$
,
 $(x_{d},y_{d},z_{d})$
and
$(x_{d},y_{d},z_{d})$
and
 $(x_{d+1},y_{d+1},z_{d+1})$
are the coordinates of node
$(x_{d+1},y_{d+1},z_{d+1})$
are the coordinates of node
 $d$
and its next node
$d$
and its next node
 $d+1$
, respectively.
$d+1$
, respectively.
Due to the performance constraints of UAV, the UAV will lose control when the yaw angle or pitch angle is too large. Therefore, the smoothness of the path needs to be taken into account, just as shown in Fig. 5, the yaw angle and pitch angle are two primary factors to affect the smoothness and feasibility of the path.
 $P_{d-1}$
,
$P_{d-1}$
,
 $P_{d}$
, and
$P_{d}$
, and
 $P_{d+1}$
are three adjoining points, whose corresponding projection points are
$P_{d+1}$
are three adjoining points, whose corresponding projection points are
 $P_{d-1}^{\prime}$
,
$P_{d-1}^{\prime}$
,
 $P_{d}^{\prime}$
, and
$P_{d}^{\prime}$
, and
 $P_{d+1}^{\prime}$
in the plane
$P_{d+1}^{\prime}$
in the plane
 $OXY$
, respectively, and the projection of point
$OXY$
, respectively, and the projection of point
 $P_{d}$
on the line
$P_{d}$
on the line
 $P_{d+1}P_{d+1}^{\prime}$
is
$P_{d+1}P_{d+1}^{\prime}$
is
 $P_{d+1}^{\prime\prime}$
. The yaw angle
$P_{d+1}^{\prime\prime}$
. The yaw angle
 $\gamma _{d}$
, indicating the turning of the UAV in the horizontal plane, denotes the angle between
$\gamma _{d}$
, indicating the turning of the UAV in the horizontal plane, denotes the angle between
 $\overrightarrow{P_{d-1}^{\prime}P_{d}^{\prime}}$
and
$\overrightarrow{P_{d-1}^{\prime}P_{d}^{\prime}}$
and
 $\overrightarrow{{P_{d}^{\prime}P_{d+1}^{\prime}}}$
, which can be calculated by Eqs. (16) and (17). So the turning cost function could be computed by Eq. (19).
$\overrightarrow{{P_{d}^{\prime}P_{d+1}^{\prime}}}$
, which can be calculated by Eqs. (16) and (17). So the turning cost function could be computed by Eq. (19).
 \begin{equation} \gamma _{d}=\mathit{\arccos }\!\left(\frac{\overrightarrow{P_{d-1}^{\prime}P_{d}^{\prime}}\cdot \overrightarrow{P_{d}^{\prime}P_{d+1}^{\prime}}}{\left\| \overrightarrow{P_{d-1}^{\prime}P_{d}^{\prime}}\right\| \cdot \left\| \overrightarrow{P_{d}^{\prime}P_{d+1}^{\prime}}\right\| }\right) \end{equation}
\begin{equation} \gamma _{d}=\mathit{\arccos }\!\left(\frac{\overrightarrow{P_{d-1}^{\prime}P_{d}^{\prime}}\cdot \overrightarrow{P_{d}^{\prime}P_{d+1}^{\prime}}}{\left\| \overrightarrow{P_{d-1}^{\prime}P_{d}^{\prime}}\right\| \cdot \left\| \overrightarrow{P_{d}^{\prime}P_{d+1}^{\prime}}\right\| }\right) \end{equation}
 \begin{equation} \gamma _{d}=\mathit{\arccos }\\ \left(\frac{\left(x_{d}-x_{d-1},y_{d}-y_{d-1}\right)\cdot \left(x_{d+1}-x_{d},y_{d+1}-y_{d}\right)^{T}}{\left\| x_{d}-x_{d-1},y_{d}-y_{d-1}\right\| \cdot \left\| x_{d+1}-x_{d},y_{d+1}-y_{d}\right\| }\right) \end{equation}
\begin{equation} \gamma _{d}=\mathit{\arccos }\\ \left(\frac{\left(x_{d}-x_{d-1},y_{d}-y_{d-1}\right)\cdot \left(x_{d+1}-x_{d},y_{d+1}-y_{d}\right)^{T}}{\left\| x_{d}-x_{d-1},y_{d}-y_{d-1}\right\| \cdot \left\| x_{d+1}-x_{d},y_{d+1}-y_{d}\right\| }\right) \end{equation}
 \begin{equation} F_{2}^{d}=\begin{cases} 0, if \gamma _{d}\leq \gamma _{max} \\[5pt] k_{t}\cdot \gamma _{d}, \textit{otherwise} \end{cases} \end{equation}
\begin{equation} F_{2}^{d}=\begin{cases} 0, if \gamma _{d}\leq \gamma _{max} \\[5pt] k_{t}\cdot \gamma _{d}, \textit{otherwise} \end{cases} \end{equation}
 \begin{equation} F_{2}=\sum _{d=2}^{D-1}F_{2}^{d} \end{equation}
\begin{equation} F_{2}=\sum _{d=2}^{D-1}F_{2}^{d} \end{equation}
where
 $\| \cdot \|$
is the Euclidean distance,
$\| \cdot \|$
is the Euclidean distance,
 $k_{t}$
and
$k_{t}$
and
 $\gamma _{max}$
are the coefficient and threshold of yaw angle, respectively, and
$\gamma _{max}$
are the coefficient and threshold of yaw angle, respectively, and
 $(x_{d-1},y_{d-1},z_{d-1})$
denotes the coordinates of the point
$(x_{d-1},y_{d-1},z_{d-1})$
denotes the coordinates of the point
 $P_{d-1}$
.
$P_{d-1}$
.
The pitch angle, denoting the climbing angle in the vertical plane, represents the angle between the projection
 $\overrightarrow{P_{d}P_{d+1}^{\prime\prime}}$
of
$\overrightarrow{P_{d}P_{d+1}^{\prime\prime}}$
of
 $\overrightarrow{P_{d}P_{d+1}}$
on the horizontal plane and
$\overrightarrow{P_{d}P_{d+1}}$
on the horizontal plane and
 $\overrightarrow{P_{d}P_{d+1}}$
, which can be calculated using Eqs. (20) and (21). The corresponding climbing cost function could be described by Eq. (23).
$\overrightarrow{P_{d}P_{d+1}}$
, which can be calculated using Eqs. (20) and (21). The corresponding climbing cost function could be described by Eq. (23).
 \begin{equation} \theta _{d}=\mathit{\arctan }\left(\frac{\left| z_{d+1}-z_{d}\right| }{\left\| \overrightarrow{P_{d}^{\prime}P_{d+1}^{\prime\prime}}\right\| }\right) \end{equation}
\begin{equation} \theta _{d}=\mathit{\arctan }\left(\frac{\left| z_{d+1}-z_{d}\right| }{\left\| \overrightarrow{P_{d}^{\prime}P_{d+1}^{\prime\prime}}\right\| }\right) \end{equation}
 \begin{equation} \theta _{d}=\mathit{\arctan }\!\left(\frac{\left| z_{d+1}-z_{d}\right| }{\left\| \left(x_{d}-x_{d+1},y_{d}-y_{d+1}\right)\right\| }\right) \end{equation}
\begin{equation} \theta _{d}=\mathit{\arctan }\!\left(\frac{\left| z_{d+1}-z_{d}\right| }{\left\| \left(x_{d}-x_{d+1},y_{d}-y_{d+1}\right)\right\| }\right) \end{equation}
 \begin{equation} F_{3}^{d}=\begin{cases} 0, if \theta _{d}\leq \theta _{max}\\[5pt] k_{c}\cdot \theta _{d}, \textit{otherwise} \end{cases} \end{equation}
\begin{equation} F_{3}^{d}=\begin{cases} 0, if \theta _{d}\leq \theta _{max}\\[5pt] k_{c}\cdot \theta _{d}, \textit{otherwise} \end{cases} \end{equation}
 \begin{equation} F_{3}=\sum _{d=1}^{D-1}F_{3}^{d} \end{equation}
\begin{equation} F_{3}=\sum _{d=1}^{D-1}F_{3}^{d} \end{equation}
where
 $| \cdot |$
is the absolute value operation,
$| \cdot |$
is the absolute value operation,
 $k_{c}$
and
$k_{c}$
and
 $\theta _{max}$
stand for the coefficient and threshold of pitch angle, respectively.
$\theta _{max}$
stand for the coefficient and threshold of pitch angle, respectively.
A UAV cannot touch buildings or break through the maximum altitude of flight, and the higher the flight altitude, the greater the possibility of being monitored by radar. Considering the constraints of geography, radar, and UAV performance, it is significant for a UAV to fly only within the feasible altitude range. Assume that
 $h_{min}$
and
$h_{min}$
and
 $h_{max}$
are the maximum and minimum feasible flight altitudes, respectively. Then the height cost function can be described by Eq. (25):
$h_{max}$
are the maximum and minimum feasible flight altitudes, respectively. Then the height cost function can be described by Eq. (25):
 \begin{equation} F_{4}^{d}=\begin{cases} 0, \quad if h_{min}^{\prime}\leq z_{d}\leq h_{max}\\[5pt] k_{h}\cdot max\!\left(z_{d}-h_{max}, h_{min}^{\prime}-z_{d}\right), \textit{otherwise} \end{cases} \end{equation}
\begin{equation} F_{4}^{d}=\begin{cases} 0, \quad if h_{min}^{\prime}\leq z_{d}\leq h_{max}\\[5pt] k_{h}\cdot max\!\left(z_{d}-h_{max}, h_{min}^{\prime}-z_{d}\right), \textit{otherwise} \end{cases} \end{equation}
 \begin{equation*} h_{min}^{\prime}=h_{min}+h\!\left(x_{i},y_{i}\right) \end{equation*}
\begin{equation*} h_{min}^{\prime}=h_{min}+h\!\left(x_{i},y_{i}\right) \end{equation*}
 \begin{equation} F_{4}=\sum _{d=1}^{D}F_{4}^{d} \end{equation}
\begin{equation} F_{4}=\sum _{d=1}^{D}F_{4}^{d} \end{equation}
where
 $z_{d}$
is the current flight altitude or the coordinate of UAV in the
$z_{d}$
is the current flight altitude or the coordinate of UAV in the
 $Z$
-axis, and
$Z$
-axis, and
 $k_{h}$
denotes the flight height coefficients of the UAV.
$k_{h}$
denotes the flight height coefficients of the UAV.
In conclusion, the overall cost function can be represented by Eq. (26), considering the path length, UAV performance, and environmental factors for the path
 $P$
.
$P$
.
 \begin{equation} F\!\left(P\right)=\sum _{t=1}^{4}F_{t}\!\left(P\right) \end{equation}
\begin{equation} F\!\left(P\right)=\sum _{t=1}^{4}F_{t}\!\left(P\right) \end{equation}
3.3. Enhanced gravitational search algorithm for UAV path planning
As we know, exploration denotes the process of accessing the entire search space, while exploitation is the process that visiting the neighborhood of the most promising points, and these two processes have a great influence on the population-based algorithm with evolutionary behavior [Reference Chen, Xin, Peng, Dou and Zhang41–Reference Vikas and Parhi43]. The particles in particle swarm optimization, having memory function, can employ the social information to move toward the current optimal particle, which can promote optimization. Since the current optimal solution is uncertain to be the global optimal solution, perturbation is necessary, aiding the particle to jump out of the local optimal solution. Therefore, an EGSA is proposed, where each particle has the memory ability and random disturbance ability to improve the performance of the algorithm.
Levy flight is a non Gaussian random process, whose essence is a random walk derived from Levy stable distribution. The step length is vital for Levy flight, which determines whether a particle can jump out of the local solution. Since the proper step length is intractable to set, chaos is a good idea, considering randomness, ergodicity, and sensitivity to the initial value for chaos. Therefore, the combination of chaos and Levy flight is applied as a random disturbance, boosting the balance ability of exploration and exploitation. The velocity Eq. (11) can be rewritten as Eq. (27).
 \begin{equation} v_{i}^{d}\!\left(t+1\right)=rand_{i}\cdot v_{i}^{d}(t)+c_{1}(t)\cdot a_{i}^{d}(t)+\\ c_{2}(t)\cdot \left(\textit{gbest}^{d}-x_{i}^{d}(t)\right)+c_{3}(t)\cdot ch_{t}\cdot Levy\!\left(\beta \right) \end{equation}
\begin{equation} v_{i}^{d}\!\left(t+1\right)=rand_{i}\cdot v_{i}^{d}(t)+c_{1}(t)\cdot a_{i}^{d}(t)+\\ c_{2}(t)\cdot \left(\textit{gbest}^{d}-x_{i}^{d}(t)\right)+c_{3}(t)\cdot ch_{t}\cdot Levy\!\left(\beta \right) \end{equation}
 \begin{equation} c_{1}(t)=-5\cdot \left(\frac{t}{T}\right)^{3}+5 \end{equation}
\begin{equation} c_{1}(t)=-5\cdot \left(\frac{t}{T}\right)^{3}+5 \end{equation}
 \begin{equation} c_{2}(t)=2.6\cdot \left(\frac{t}{T}\right)^{2} \end{equation}
\begin{equation} c_{2}(t)=2.6\cdot \left(\frac{t}{T}\right)^{2} \end{equation}
 \begin{equation} c_{3}(t)=2.58\cdot \left(\frac{t}{T}\right)^{10} \end{equation}
\begin{equation} c_{3}(t)=2.58\cdot \left(\frac{t}{T}\right)^{10} \end{equation}
 \begin{equation} Levy\!\left(\beta \right)=\frac{\mu }{\left| \nu \right| ^{1/\beta }} \end{equation}
\begin{equation} Levy\!\left(\beta \right)=\frac{\mu }{\left| \nu \right| ^{1/\beta }} \end{equation}
where
 $\textit{gbest}^{d}$
denotes the
$\textit{gbest}^{d}$
denotes the
 $d\mathrm{th}$
dimension of the current optimal solution;
$d\mathrm{th}$
dimension of the current optimal solution;
 $c_{1}$
,
$c_{1}$
,
 $c_{2}$
, and
$c_{2}$
, and
 $c_{3}$
are named as the coefficients of acceleration, memory, and disturbance, respectively;
$c_{3}$
are named as the coefficients of acceleration, memory, and disturbance, respectively;
 $\mu$
and
$\mu$
and
 $\nu$
follow the normal distribution as follows:
$\nu$
follow the normal distribution as follows:
 \begin{equation*} \mu \sim N\!\left(0,1\right) \end{equation*}
\begin{equation*} \mu \sim N\!\left(0,1\right) \end{equation*}
 \begin{equation*} \nu \sim N\!\left(0,\sigma _{\varsigma }^{2}\right) \end{equation*}
\begin{equation*} \nu \sim N\!\left(0,\sigma _{\varsigma }^{2}\right) \end{equation*}
 \begin{equation} \sigma _{\varsigma }=\left(\frac{\Gamma \!\left(1+\beta \right)\mathit{\sin } \!\left(\pi \beta /2\right)}{\Gamma \!\left(\left(1+\beta \right)/2\right)\beta 2^{\left(\beta -1\right)/2}}\right)^{1/\beta }\end{equation}
\begin{equation} \sigma _{\varsigma }=\left(\frac{\Gamma \!\left(1+\beta \right)\mathit{\sin } \!\left(\pi \beta /2\right)}{\Gamma \!\left(\left(1+\beta \right)/2\right)\beta 2^{\left(\beta -1\right)/2}}\right)^{1/\beta }\end{equation}
where
 $\Gamma$
is referred to as the standard gamma function.
$\Gamma$
is referred to as the standard gamma function.
In summary, the pseudocode of our proposed EGSA for UAV path planning in 3D space is shown in Algorithm 1.
3.4. Computational complexity
Here, for the convenience of complexity analysis, let
 $D$
and
$D$
and
 $N$
be the dimension of decision variables and the population size. For EGSA, the mass calculation, acceleration computing, update of velocity and position, and evaluation consume the main calculation, whose maximum computational complexity is
$N$
be the dimension of decision variables and the population size. For EGSA, the mass calculation, acceleration computing, update of velocity and position, and evaluation consume the main calculation, whose maximum computational complexity is
 $O(ND)$
in one loop. Therefore, the overall computational complexity of EGSA is
$O(ND)$
in one loop. Therefore, the overall computational complexity of EGSA is
 $O(ND)$
for one main cycle.
$O(ND)$
for one main cycle.
Algorithm 1. EGSA for UAV path planning

4. Experiments and discussion
This section characterizes the experimental setting and the performance of our proposed method. First, the parameter setting is introduced. The performance of EGSA is checked by comparing it with seven peer algorithms. Next, the effects of acceleration, memory ability of particle, and random disturbance are observed. Then our proposed path planning method is compared with seven methods under diverse environments. Finally, the influence of population size on our proposed algorithm is analyzed.
4.1. Parameter setting
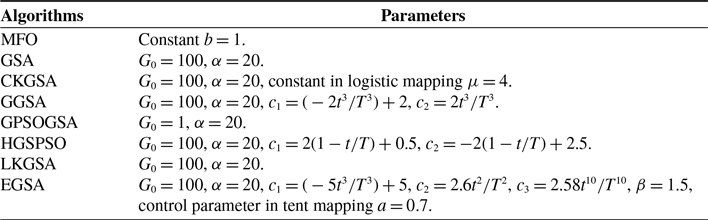
To verify the performance of the proposed algorithm, let EGSA compare with moth flame optimization algorithm (MFO) [Reference Mirjalili44], GSA [Reference Rashedi, Nezamabadi-pour and Saryazdi38], chaotic kbest gravitational search algorithm (CKGSA) [Reference Mittal, Pal, Kulhari and Saraswat45], gbest guided gravitational search algorithm (GGSA) [Reference Mirjalili and Lewis46], gaussian particle swarm optimization and gravitational search algorithm (GPSOGSA) [Reference Kumar and John47], hybrid gravitational search particle swarm optimization algorithm (HGSPSO) [Reference Khan and Ling48], and logarithmic kbest gravitational search algorithm (LKGSA) [Reference Mittal and Saraswat49], and the parameters of these eight algorithms are listed in Table I, and the population size
 $N$
and the maximum number of iterations
$N$
and the maximum number of iterations
 $T$
are 50 and 3000, respectively. The coefficients
$T$
are 50 and 3000, respectively. The coefficients
 $k_{t}$
,
$k_{t}$
,
 $k_{c}$
, and
$k_{c}$
, and
 $k_{h}$
of yaw angle, pitch angle, and flight height are defined to 20, 20, and 30, respectively. The thresholds
$k_{h}$
of yaw angle, pitch angle, and flight height are defined to 20, 20, and 30, respectively. The thresholds
 $\gamma _{max}$
,
$\gamma _{max}$
,
 $\theta _{max}$
,
$\theta _{max}$
,
 $h_{min}$
, and
$h_{min}$
, and
 $h_{max}$
of yaw angle, pitch angle, minimum flight height, and maximum flight height are set to 60, 45, 5, and 200, respectively. To be fair, all the experiments are run on the computer with an Intel Core i7 2.6 GHz and Windows 10 operating system.
$h_{max}$
of yaw angle, pitch angle, minimum flight height, and maximum flight height are set to 60, 45, 5, and 200, respectively. To be fair, all the experiments are run on the computer with an Intel Core i7 2.6 GHz and Windows 10 operating system.
Table I. Parameter settings for eight algorithms.
4.2. Experimental results on CEC 2020 benchmark functions
Here, the performance of EGSA is verified on CEC 2020 with dimension
 $D=20$
, compared with MFO, GSA, CKGSA, GGSA, GPSOGSA, HGSPSO, and LKGSA [Reference Yue, Price, Suganthan, Liang, Ali, Qu, Awad and Biswas50]. These eight algorithms were run 30 times independently, and several indicators, including the best results, mean results, and standard deviation (Std) of the optimal values, are applied to evaluate the performance of these algorithms. Furthermore, the Wilcoxon rank sum test at a 0.05 significance level is employed between EGSA and the other seven algorithms, and the symbols ‘+’, ‘−’, and ‘∼’ denote that the performance of the corresponding algorithm is significantly better, worse, and similar than that obtained by EGSA on the benchmark function, respectively [Reference Li, Guo, Lerch, Li, Wang and Wu51, Reference Derrac, García, Molina and Herrera52]. The experimental results on CEC 2020 obtained by these eight algorithms are recorded in Table II and Fig. 6.
$D=20$
, compared with MFO, GSA, CKGSA, GGSA, GPSOGSA, HGSPSO, and LKGSA [Reference Yue, Price, Suganthan, Liang, Ali, Qu, Awad and Biswas50]. These eight algorithms were run 30 times independently, and several indicators, including the best results, mean results, and standard deviation (Std) of the optimal values, are applied to evaluate the performance of these algorithms. Furthermore, the Wilcoxon rank sum test at a 0.05 significance level is employed between EGSA and the other seven algorithms, and the symbols ‘+’, ‘−’, and ‘∼’ denote that the performance of the corresponding algorithm is significantly better, worse, and similar than that obtained by EGSA on the benchmark function, respectively [Reference Li, Guo, Lerch, Li, Wang and Wu51, Reference Derrac, García, Molina and Herrera52]. The experimental results on CEC 2020 obtained by these eight algorithms are recorded in Table II and Fig. 6.
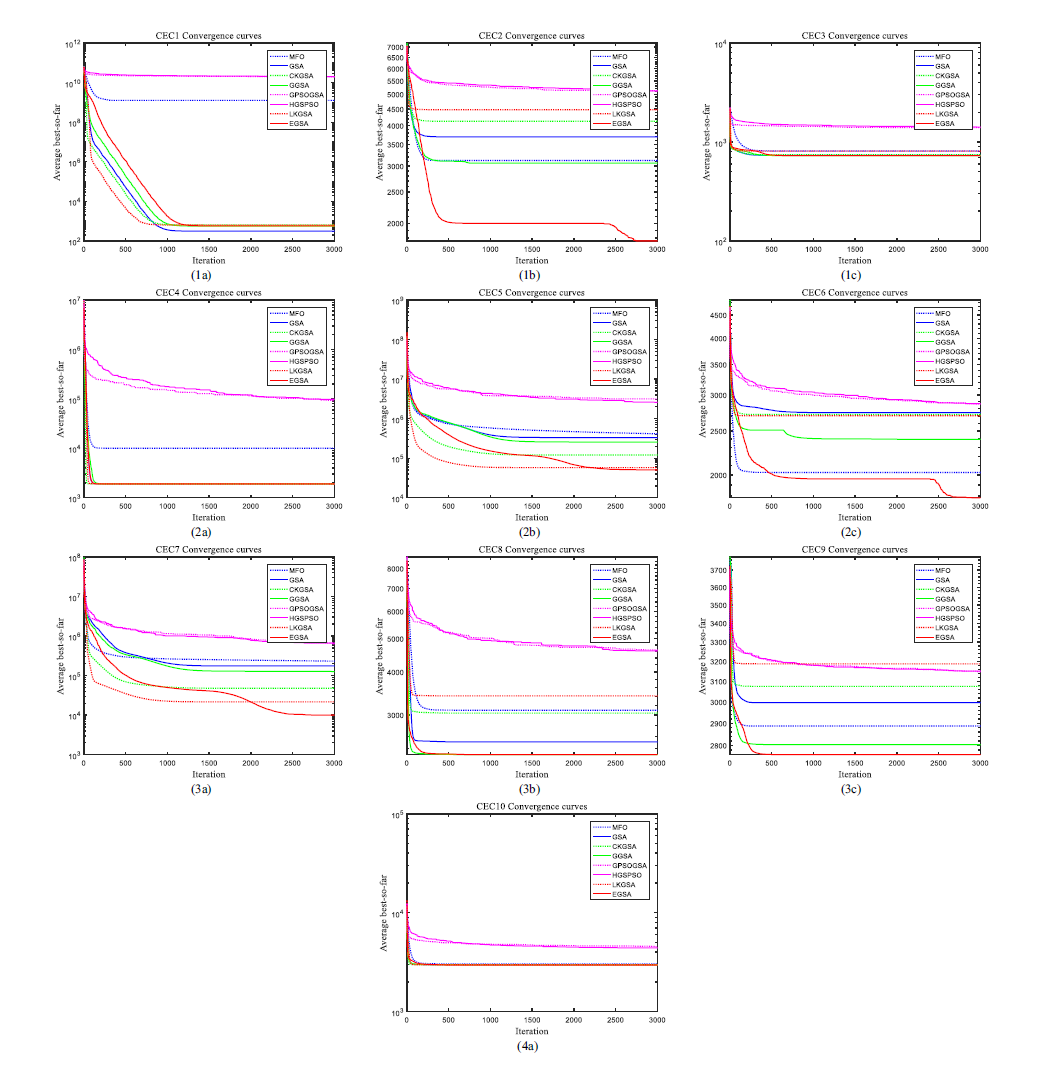
Figure 6. The convergence curves of mean values obtained by EGSA and compared algorithms on CEC 2020 benchmark functions.
Table II. Best values, mean values, standard deviations, and p-values of the minimum values obtained by EGSA and compared algorithms on CEC 2020 benchmark functions.

From the view of the mean value in Table II, EGSA reveals a better performance than the other seven algorithms on most of these benchmark functions, winning the best place except CEC1 and CEC8. For function CEC1, the best performance is obtained by GSA, in fact, EGSA behaves similarly to GSA from the perspective of the Wilcoxon rank sum test. For function CEC8, GGSA performs best, but the performance of EGSA is not bad and ranks second among that displayed by eight algorithms, maybe the random disturbance cannot improve the performance of EGSA on CEC8. At the same time, the convergence curves in Fig. 6 verified the excellent performance of EGSA in CEC 2020 again.
As denoted by the symbols of “+/−/∼” at the bottom of Table II, EGSA performs better than MFO, GSA, CKGSA, GGSA, GPSOGSA, HGSPSO, and LKGSA on 10, 8, 8, 7, 10, 10, and 7 benchmark functions and gets similar results with GSA, CKGSA, GGSA, and LKGSA on 2, 2, 2, and 3 out of the 10 test instances. As shown by the average ranking, the average ranking of EGSA is better than that of comparison algorithms, demonstrating that EGSA owns a better balance between exploitation and exploration and has superiority over the peer algorithms.
4.3. The effect of acceleration, memory ability of particle, and random disturbance
To investigate the influence of acceleration, memory ability of particle, and random disturbance, EGSA is compared with six variants on CEC 2020, meanwhile, explaining the rationality of parameter setting. The coefficients
 $c_{1}$
,
$c_{1}$
,
 $c_{2}$
, and
$c_{2}$
, and
 $c_{3}$
are set to the minimum and maximum in the range of variation, respectively. The changed parameters and functions of six variants about EGSA are listed in Table III, and all the other parameters remain unchanged. Table IV and Fig. 7 reveal the experimental results attained by six variants and EGSA.
$c_{3}$
are set to the minimum and maximum in the range of variation, respectively. The changed parameters and functions of six variants about EGSA are listed in Table III, and all the other parameters remain unchanged. Table IV and Fig. 7 reveal the experimental results attained by six variants and EGSA.
Table III. The changed parameter and function of six variants about EGSA.
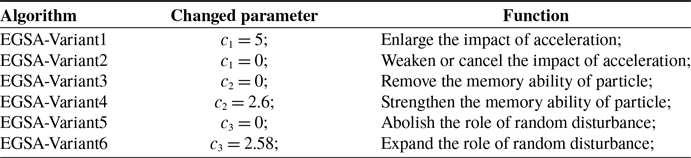
Table IV. Best values, mean values, standard deviations, and p-values of the minimum values obtained by six variants and EGSA on CEC 2020 benchmark functions.
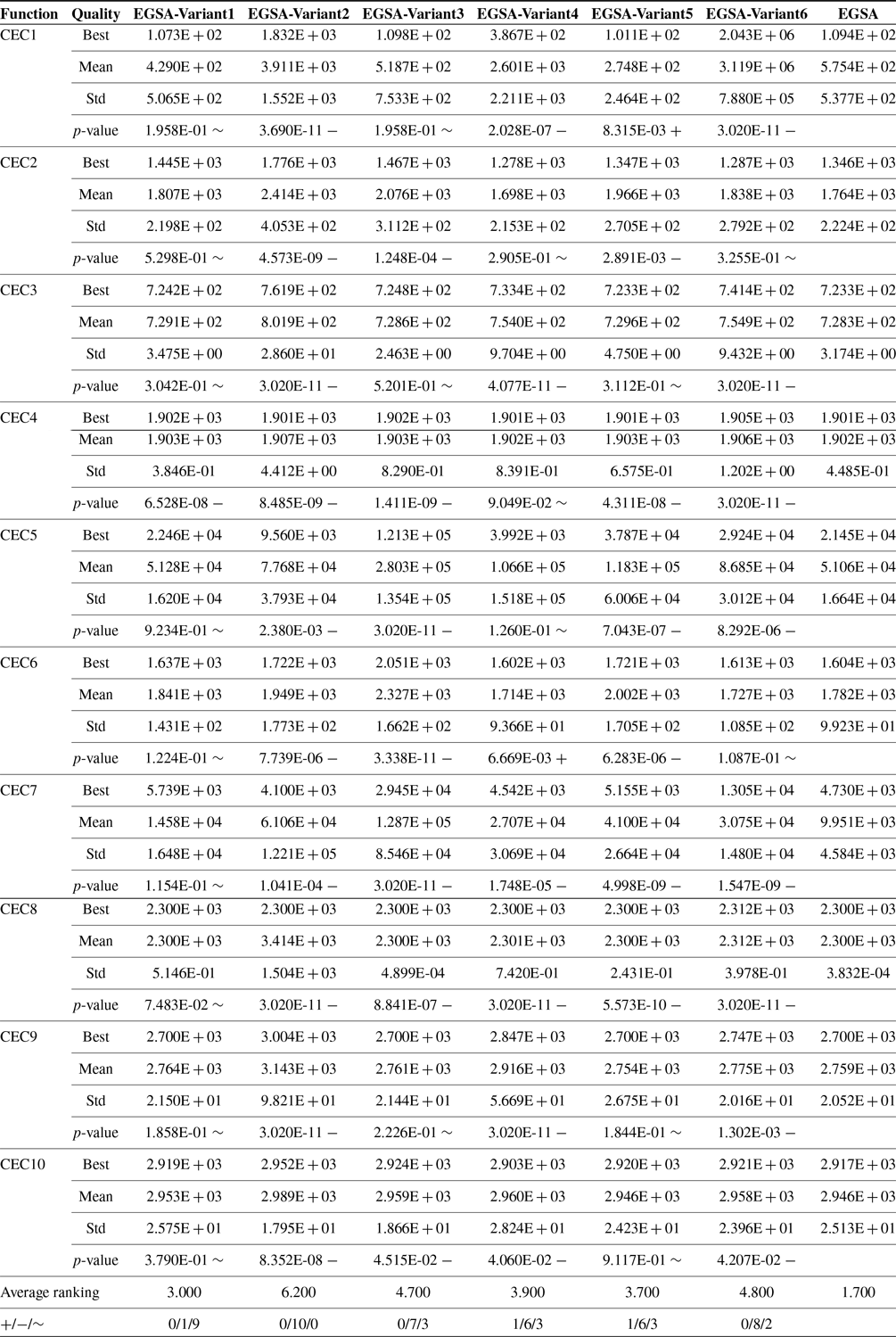
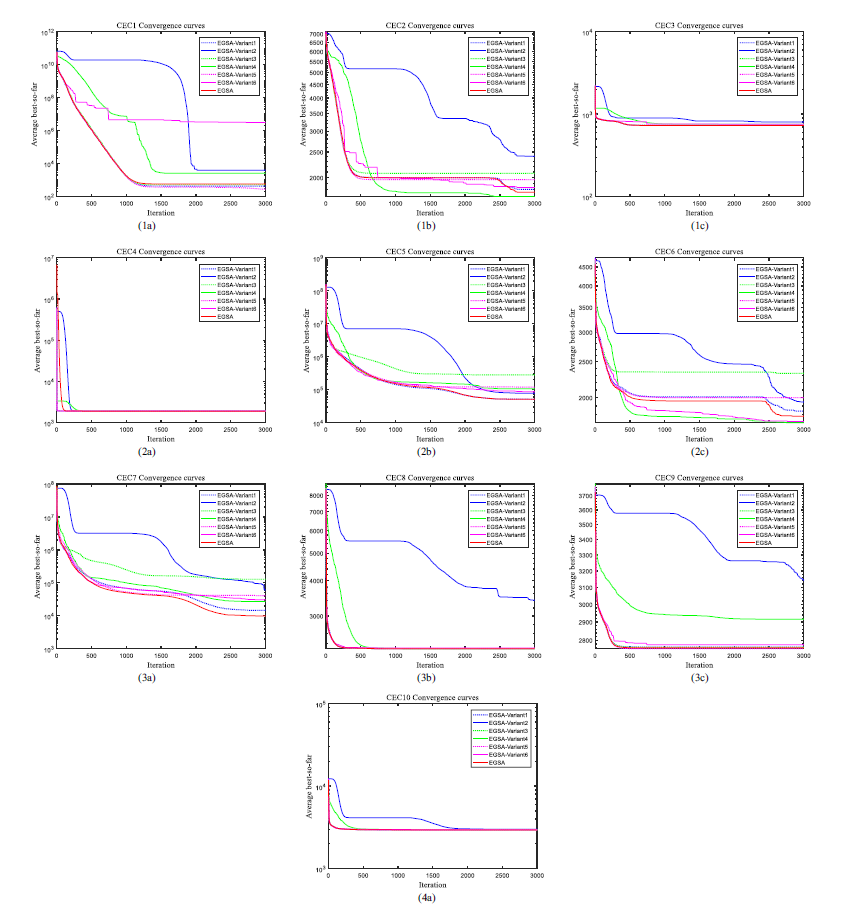
Figure 7. The convergence curves of mean values obtained by six variants and EGSA on CEC 2020 benchmark functions.
Our proposed algorithm EGSA achieves the top two on eight benchmark functions and wins the first place on six benchmark functions. For the functions CEC1 and CEC6, the EGSA-Variant5 and EGSA-Variant4 win the championship, respectively, however, these two algorithms do not perform well in the other five functions, which implies that the performance of EGSA cannot be promoted by overstrengthening the memory ability of particle or abandoning the random disturbance. For the algorithms EGSA-Variant2, EGSA-Variant3, and EGSA-Variant6, the performance of these three algorithms seem to be deteriorating, which implies that acceleration and memory ability of particle can evoke the performance, but large random disturbance is not desirable. For EGAS-Variant1, boosting the effect of acceleration, the performance is a little worse, which illustrates that overemphasized acceleration cannot facilitate performance.
The results of the Wilcoxon test, shown in the last row of Table IV, indicate that EGSA is superior to six variants in 1, 10, 7, 6, 6, and 8 out of the 10 test functions and performs similarly to six variants in 9, 0, 3, 3, and 2 out of the 10 test functions. The average ranking, put on the penultimate row of Table IV, explains that the performance of EGSA surpasses that of six variants, and the convergence curves in Fig. 7 declare the outstanding performance of EGSA again. Therefore, the acceleration, memory ability of particle, and random disturbance can affect the performance, which should not be too weakened or strengthened.
4.4. Experimental results in the simple environment
Assume that there is no more than one obstacle in an environment, which is named as a simple environment. The coordinates of the starting point and end point for a UAV are defined as
 $(1,5,10)$
and
$(1,5,10)$
and
 $(201,190,70)$
, respectively. The paths achieved by eight algorithms are shown in Fig. 8, and the relevant convergence curves are represented in Fig. 9. Intuitively, in Fig. 8, the path got by EGSA is much better than that obtained by MFO, GSA, CKGSA, GGSA, GPSOGSA, HGSPSO, and LKGSA in terms of smoothness and length. From the perspective of convergence curves, just as presented in Fig. 9, EGSA converges faster than the other seven algorithms and wins the lowest overall cost value in the end, which means that EGSA has a good balance between exploration and exploitation for this question. So EGSA can perform better than MFO, GSA, CKGSA, GGSA, GPSOGSA, HGSPSO, and LKGSA in this simple environment. As a matter of fact, we discover that
$(201,190,70)$
, respectively. The paths achieved by eight algorithms are shown in Fig. 8, and the relevant convergence curves are represented in Fig. 9. Intuitively, in Fig. 8, the path got by EGSA is much better than that obtained by MFO, GSA, CKGSA, GGSA, GPSOGSA, HGSPSO, and LKGSA in terms of smoothness and length. From the perspective of convergence curves, just as presented in Fig. 9, EGSA converges faster than the other seven algorithms and wins the lowest overall cost value in the end, which means that EGSA has a good balance between exploration and exploitation for this question. So EGSA can perform better than MFO, GSA, CKGSA, GGSA, GPSOGSA, HGSPSO, and LKGSA in this simple environment. As a matter of fact, we discover that
 $F_{2}$
,
$F_{2}$
,
 $F_{3}$
, and
$F_{3}$
, and
 $F_{4}$
in the overall cost function are all equal to 0 for the last obtained paths, which implies that the proposed method can obtain the path satisfying the three constraints and the path length becomes the main factor affecting the optimality at last.
$F_{4}$
in the overall cost function are all equal to 0 for the last obtained paths, which implies that the proposed method can obtain the path satisfying the three constraints and the path length becomes the main factor affecting the optimality at last.
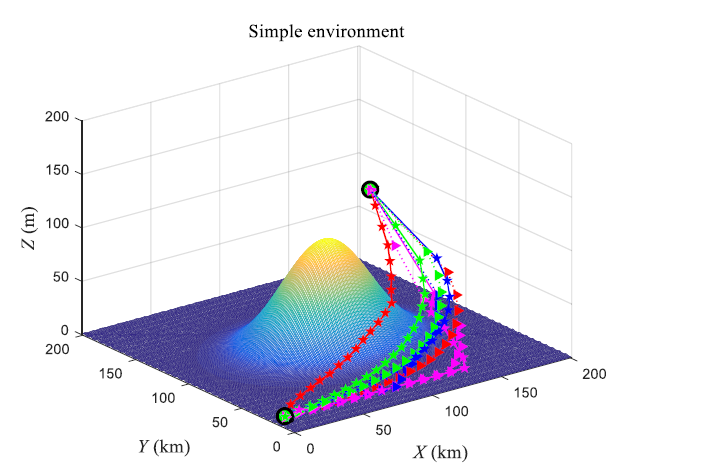
Figure 8. Path planning results obtained by eight algorithms in the simple environment; blue triangle dotted line, blue pentagram solid line, green triangle dotted line, green pentagram solid line, purple triangle dotted line, purple pentagram solid line, red triangle dotted line, and red pentagram solid line are acquired by MFO, GSA, CKGSA, GGSA, GPSOGSA, HGSPSO, LKGSA, and EGSA, respectively.
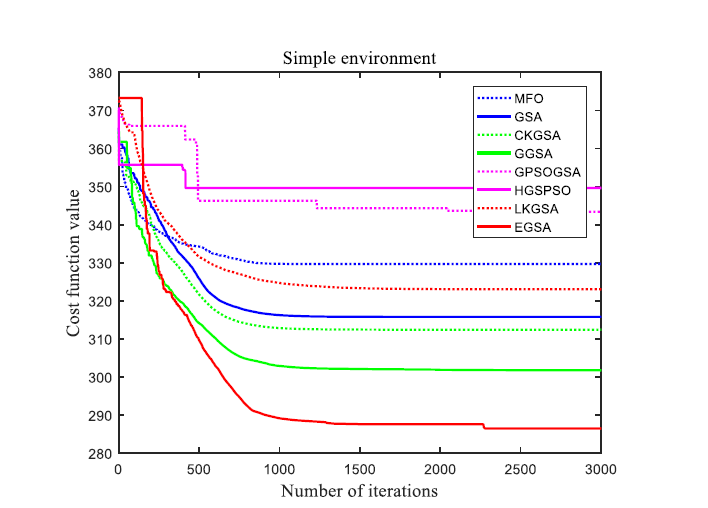
Figure 9. Convergence curves of eight algorithms in the simple environment.
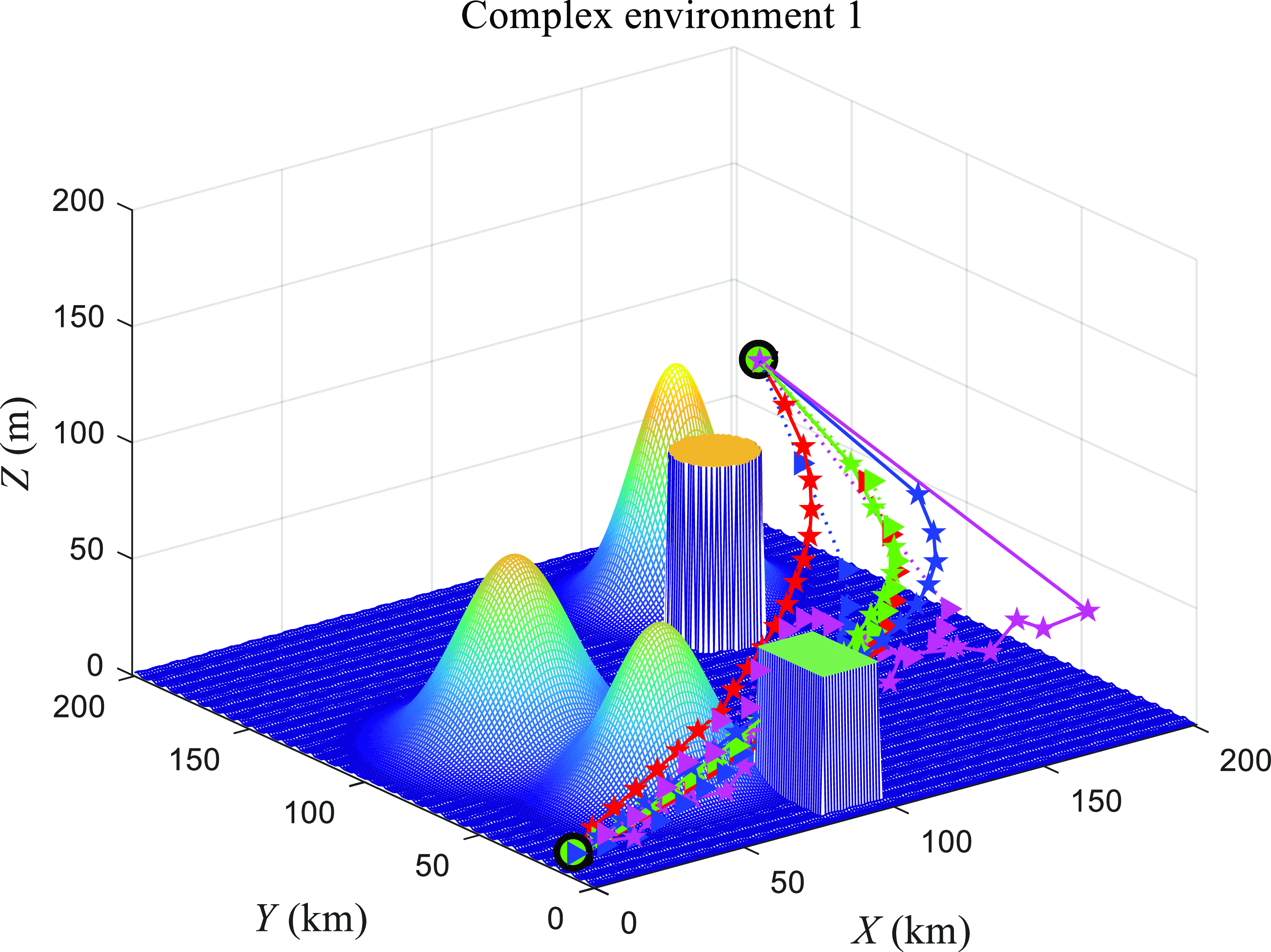
Figure 10. Path planning results obtained by eight algorithms in the complex environment 1; blue triangle dotted line, blue pentagram solid line, green triangle dotted line, green pentagram solid line, purple triangle dotted line, purple pentagram solid line, red triangle dotted line, and red pentagram solid line are acquired by MFO, GSA, CKGSA, GGSA, GPSOGSA, HGSPSO, LKGSA, and EGSA, respectively.

Figure 11. Convergence curves of eight algorithms in the complex environment 1.
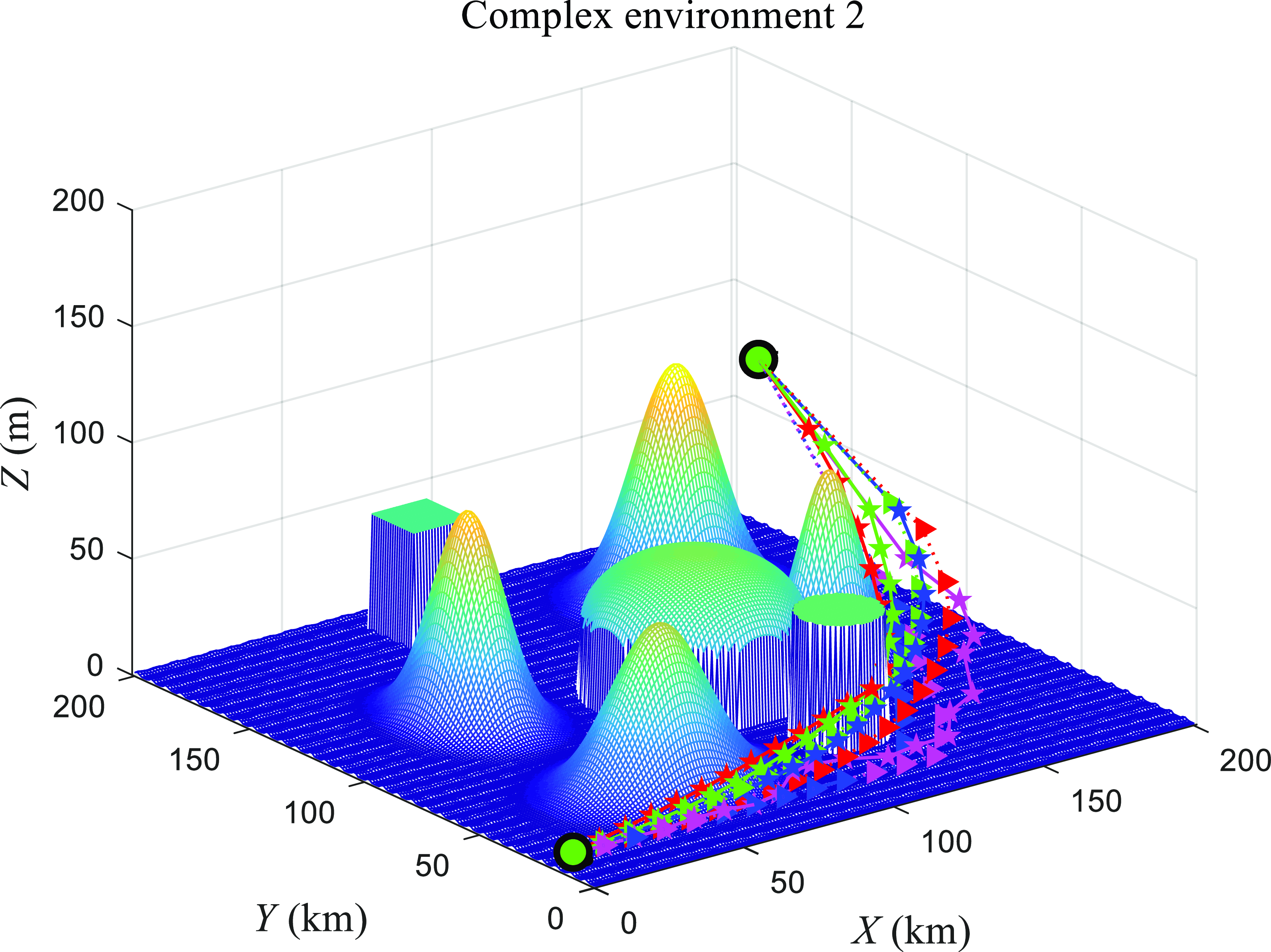
Figure 12. Path planning results obtained by eight algorithms in the complex environment 2; blue triangle dotted line, blue pentagram solid line, green triangle dotted line, green pentagram solid line, purple triangle dotted line, purple pentagram solid line, red triangle dotted line, and red pentagram solid line are acquired by MFO, GSA, CKGSA, GGSA, GPSOGSA, HGSPSO, LKGSA, and EGSA, respectively.

Figure 13. Convergence curves of eight algorithms in the complex environment 2.

Figure 14. Path planning results obtained by eight algorithms in the complex environment 3; blue triangle dotted line, blue pentagram solid line, green triangle dotted line, green pentagram solid line, purple triangle dotted line, purple pentagram solid line, red triangle dotted line, and red pentagram solid line are acquired by MFO, GSA, CKGSA, GGSA, GPSOGSA, HGSPSO, LKGSA, and EGSA, respectively.
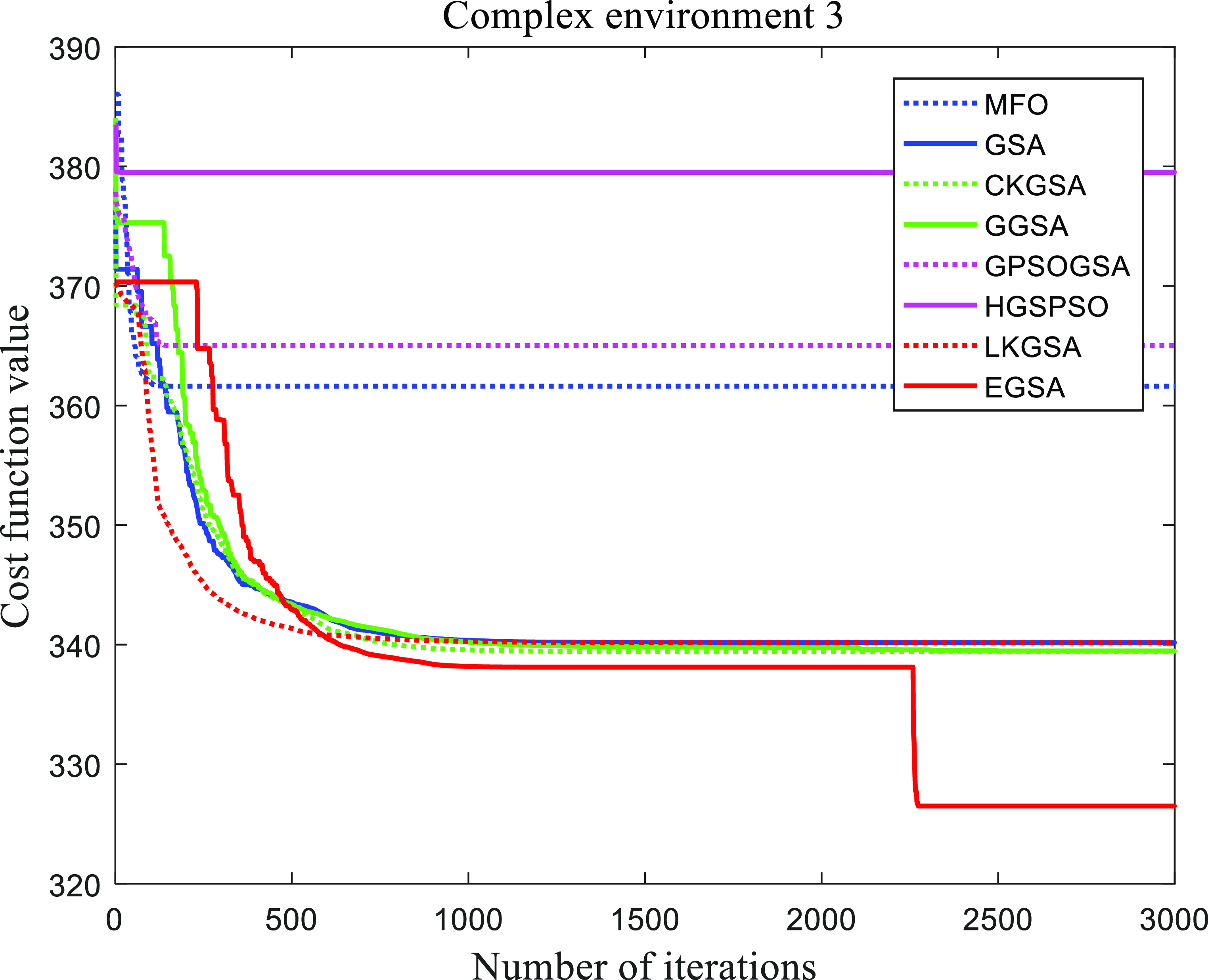
Figure 15. Convergence curves of eight algorithms in the complex environment 3.

Figure 16. Path planning results obtained by eight algorithms in the complex environment 4; blue triangle dotted line, blue pentagram solid line, green triangle dotted line, green pentagram solid line, purple triangle dotted line, purple pentagram solid line, red triangle dotted line, and red pentagram solid line are acquired by MFO, GSA, CKGSA, GGSA, GPSOGSA, HGSPSO, LKGSA, and EGSA, respectively.

Figure 17. Convergence curves of eight algorithms in the complex environment 4.
4.5. Experimental results in the complex environment
Suppose that plenty of obstacles exist in the environment, like hills and buildings, which is considered as a complex environment. In complex environment 1, the obstacles are scattered, while in complex environments 2, 3, and 4, the obstacles are relatively concentrated. The starting point and terminal point settings are identical to those in the simple environment. For the complex environment 1, the paths and convergence curves obtained by eight algorithms are drawn in Fig. 10 and Fig. 11. The path obtained by EGSA is shorter and smoother than those obtained by the other seven algorithms. The convergence rate of EGSA is faster than those of comparison algorithms and its corresponding cost value is the smallest among the eight algorithms. For the complex environments 2, 3, and 4, Fig. 12, Fig. 13, Fig. 14, Fig. 15, Fig. 16, and Fig. 17 represent the paths and convergence curves obtained by eight algorithms, respectively. Intuitively, the paths obtained by MFO, GSA, CKGSA, GGSA, GPSOGSA, HGSPSO, and LKGSA are longer than those obtained by EGSA. At the same time, from the views of convergence speed and cost value, the performance of EGSA is much better than that of the other seven algorithms, and EGSA stands out as the top performer. Therefore, the performance of EGSA is the best among those eight algorithms in these four complex environments. The path length, like that in the simple environment, also becomes the primary contributor affecting the optimality for the last obtained path.
Table V. Comparison of simulation results of eight algorithms.
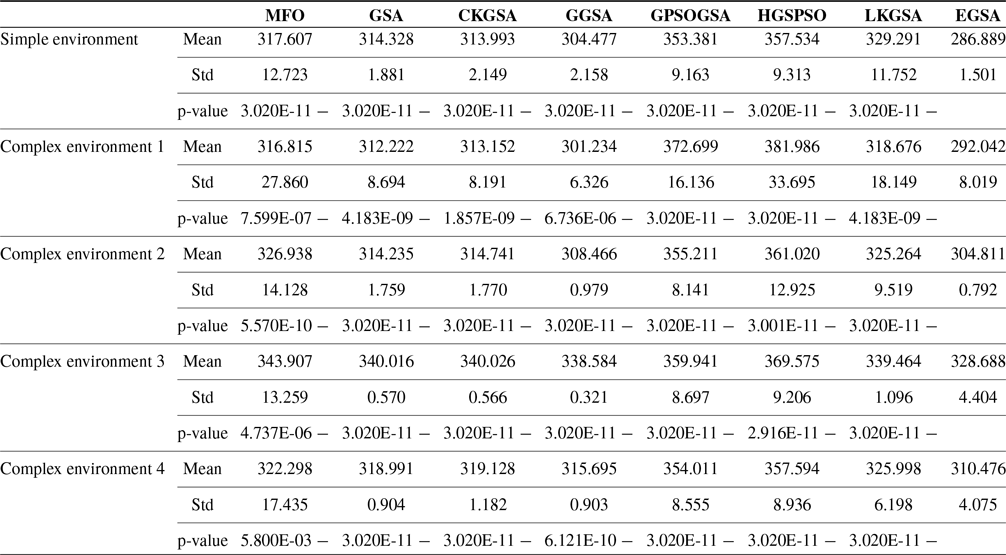
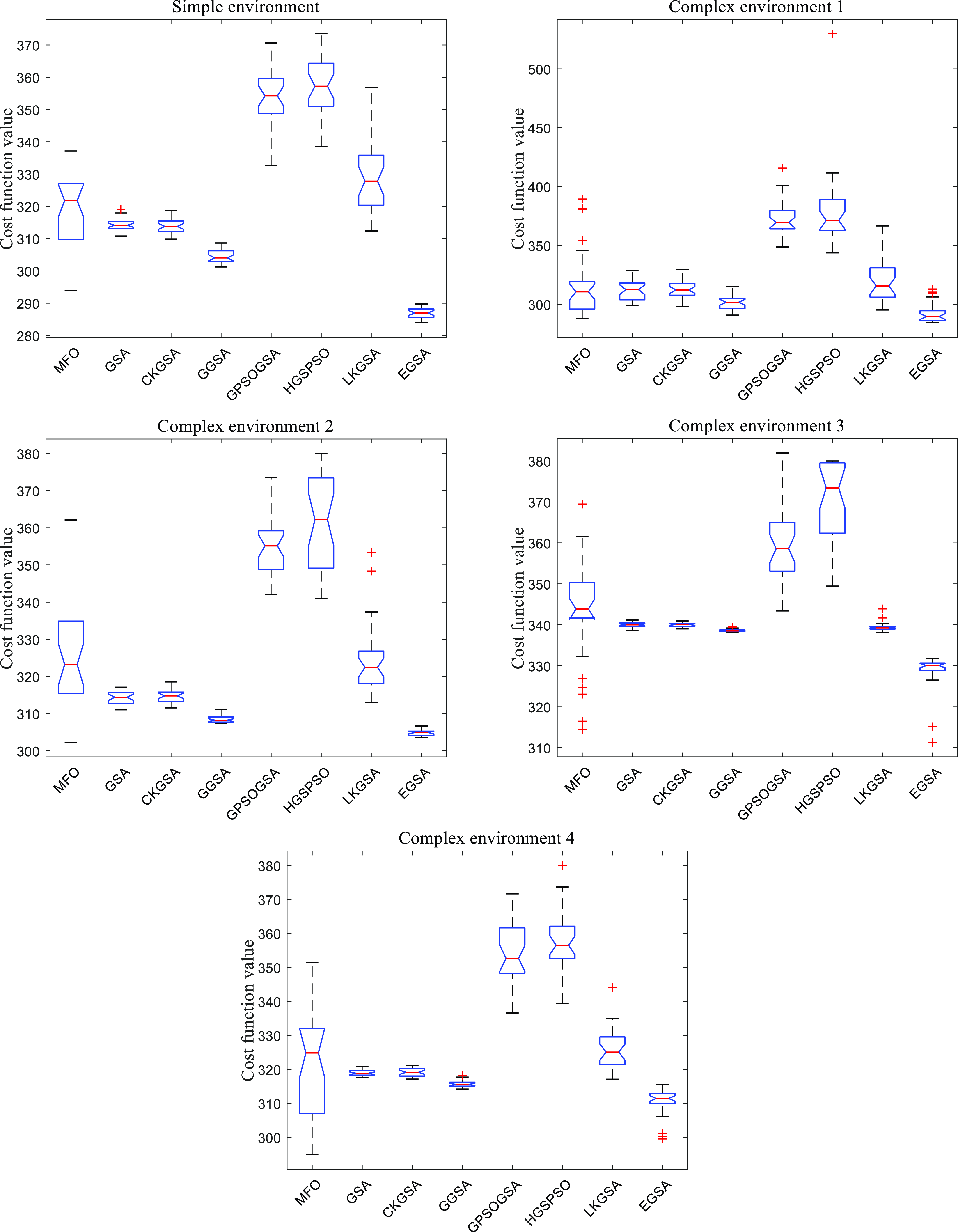
Figure 18. Boxplots of the results obtained by eight algorithms in different environments.
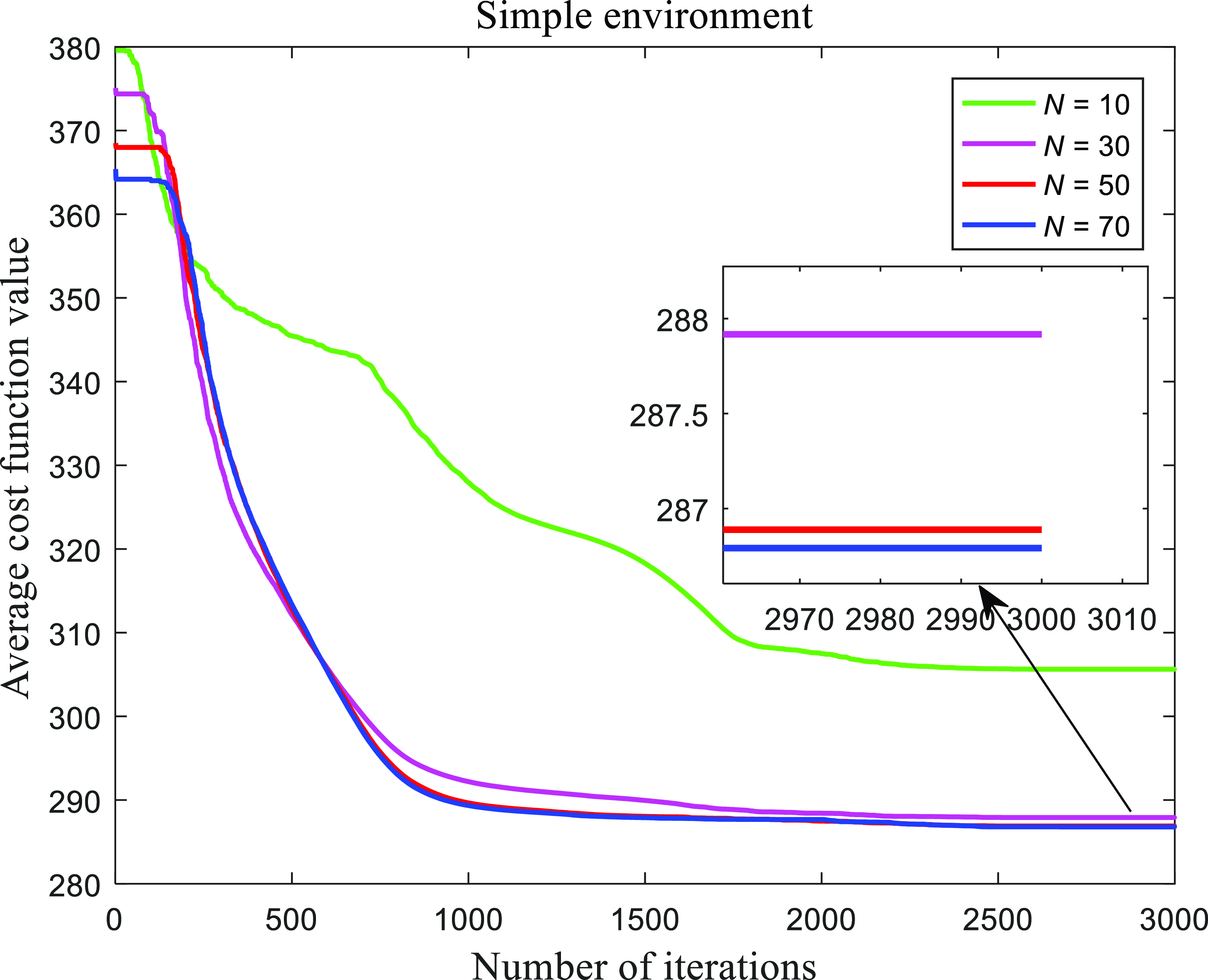
Figure 19. Average convergence curves of EGSA with different population size in the simple environment.
To objectively and accurately verify the performance of the proposed algorithm, the eight algorithms have been run 30 times in four kinds of environments, and Table V presents the mean, Std, and p-vlaue of the overall cost values. Obviously, the mean and Std of EGSA are much smaller than the results of MFO, GSA, CKGSA, GGSA, GPSOGSA, HGSPSO, and LKGSA. From the Wilcoxon test, our proposed EGSA has significant advantages over other comparison algorithms. Meanwhile, it can be seen that chaotic levy flight could regulate exploration and exploitation compared with GGSA. The data distribution characteristics are presented in Fig. 18. The boxplots of the proposed algorithm, with the lowest values, are very narrow compared to the results of the other seven algorithms. Hence, the proposed EGSA has much better effectiveness and robustness than MFO, GSA, CKGSA, GGSA, GPSOGSA, HGSPSO, and LKGSA for path planning in simple and complex environments.

Figure 20. Boxplots of the results obtained by EGSA with different population size in the simple environment.

Figure 21. Average convergence curves of EGSA with different population size in the complex environment 1.

Figure 22. Boxplots of the results obtained by EGSA with different population size in the complex environment 1.
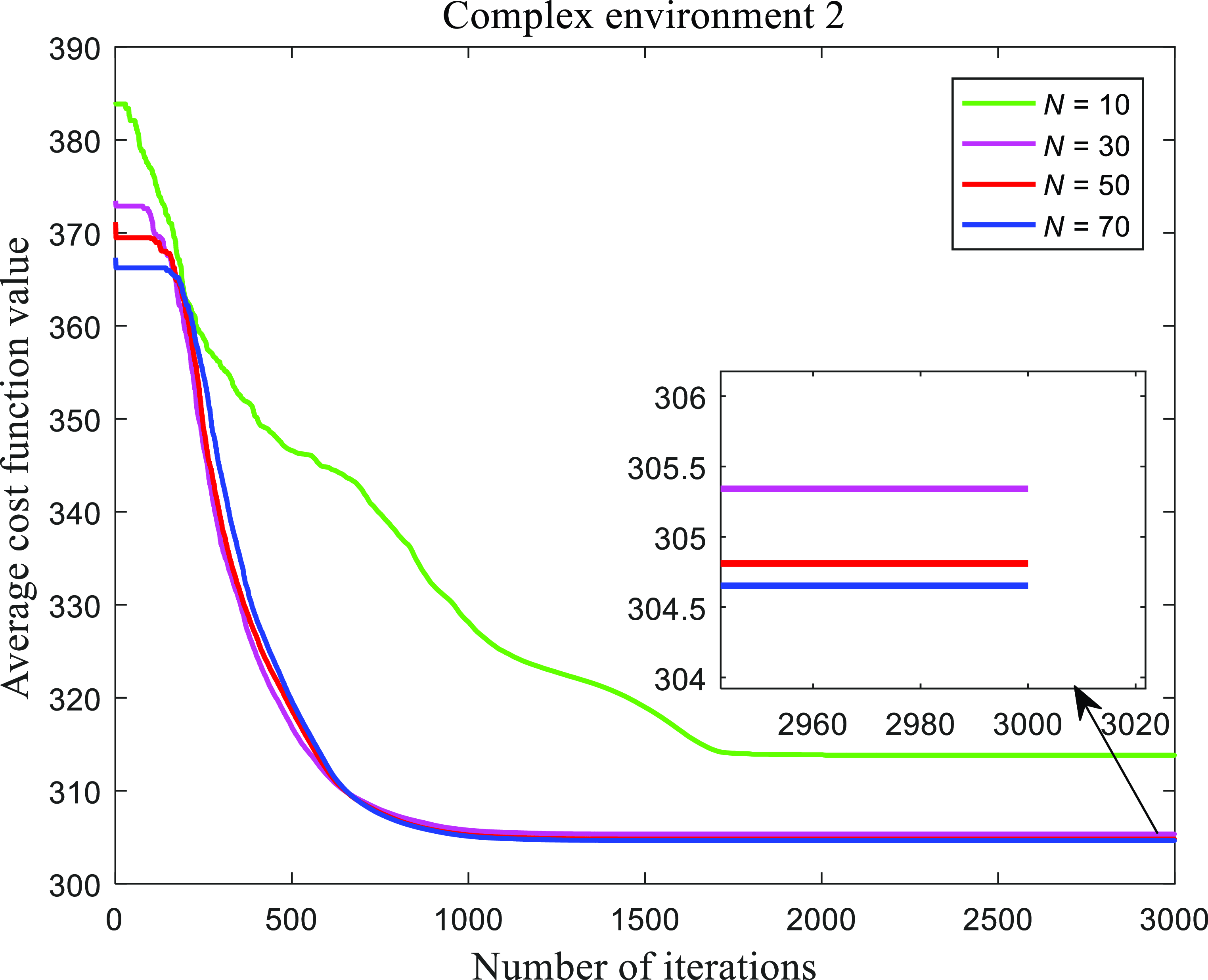
Figure 23. Average convergence curves of EGSA with different population size in the complex environment 2.

Figure 24. Boxplots of the results obtained by EGSA with different population size in the complex environment 2.
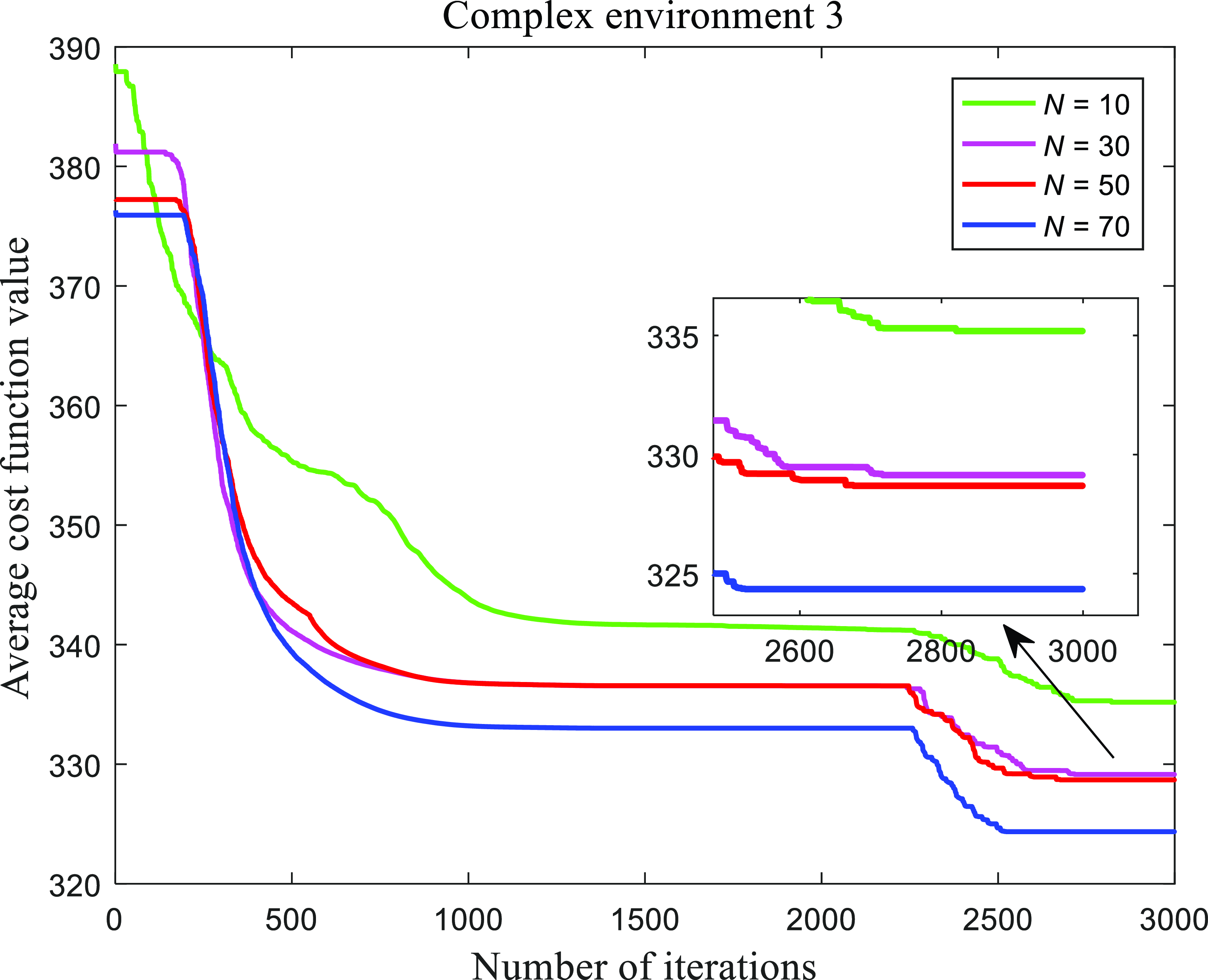
Figure 25. Average convergence curves of EGSA with different population size in the complex environment 3.
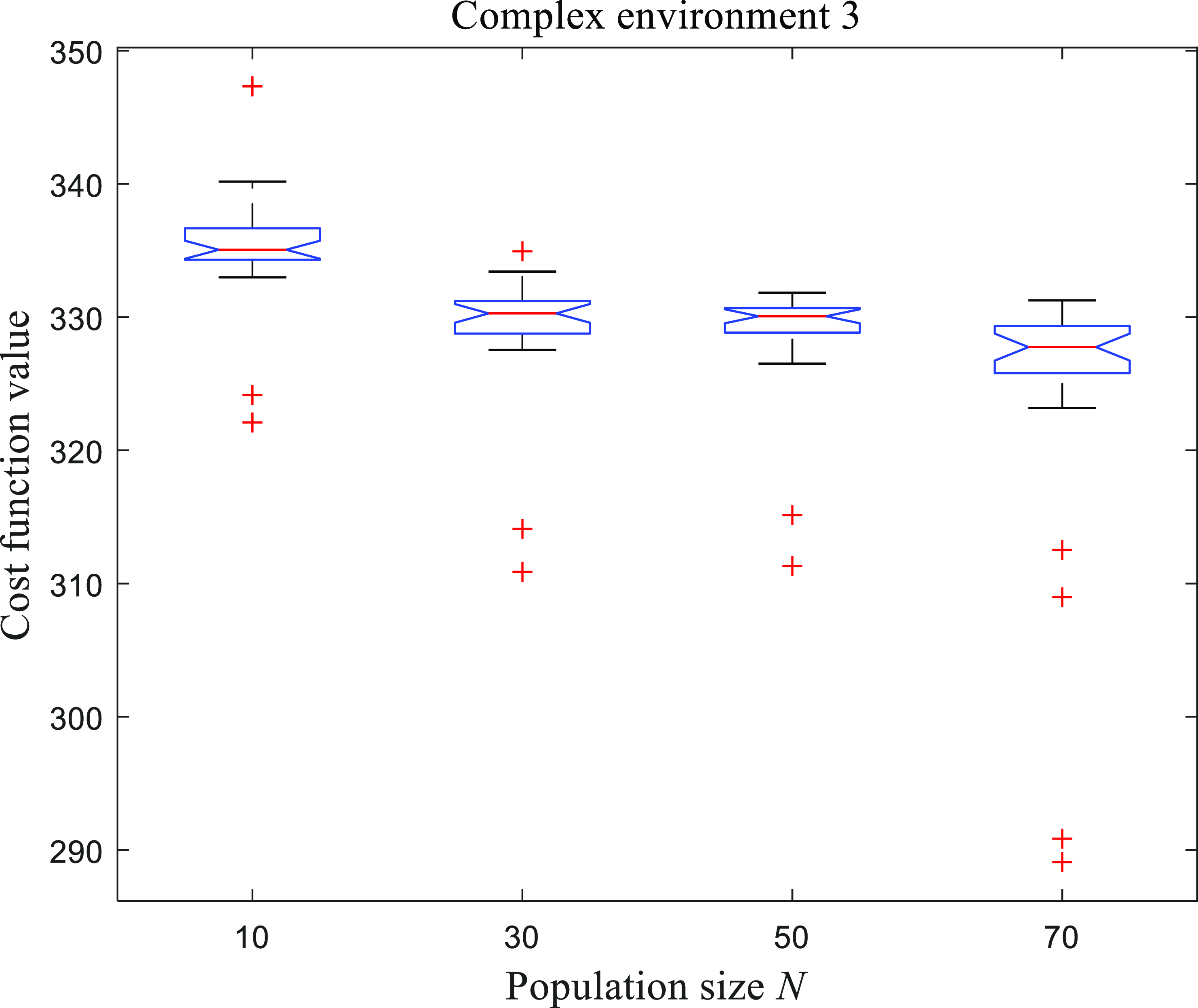
Figure 26. Boxplots of the results obtained by EGSA with different population size in the complex environment 3.
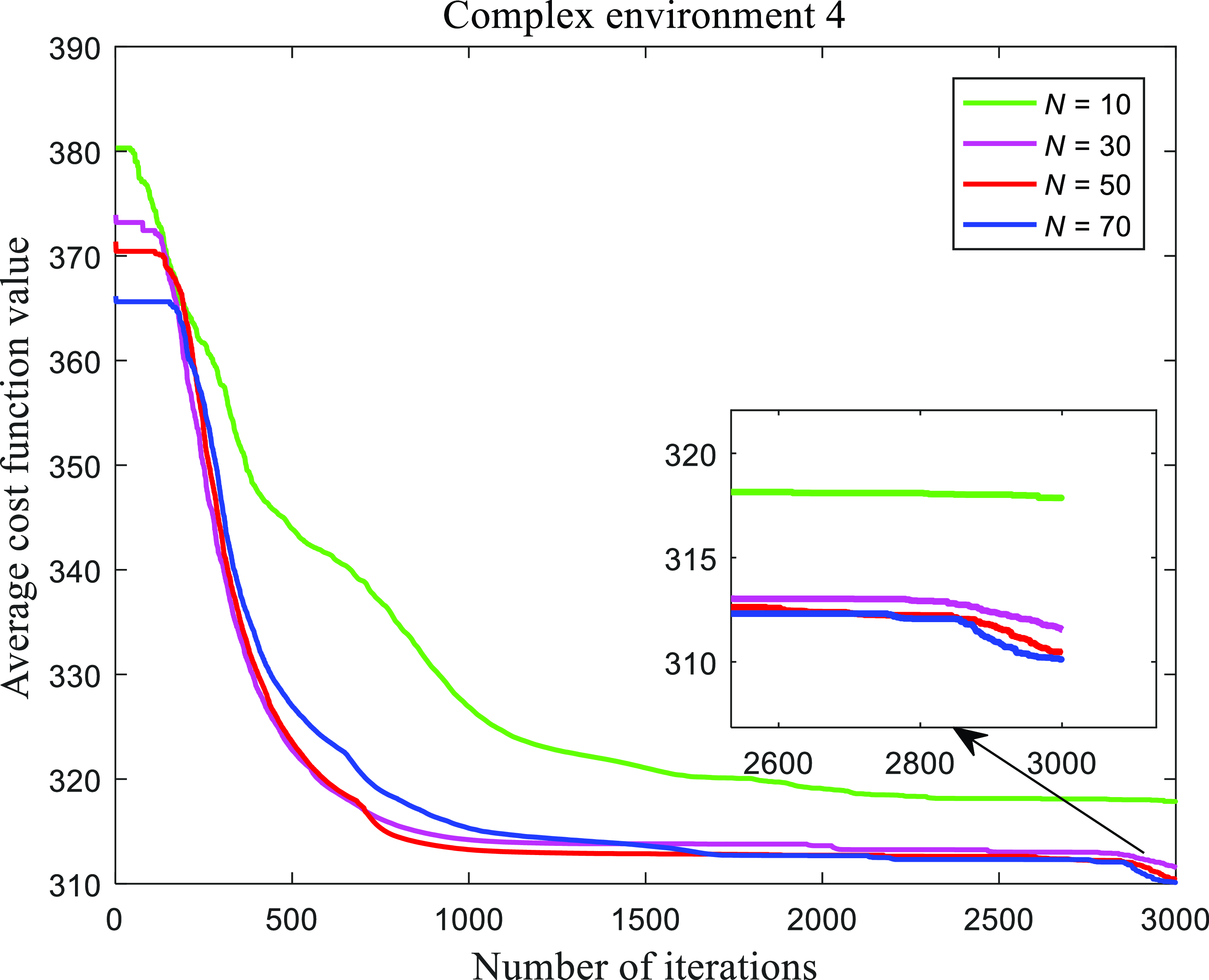
Figure 27. Average convergence curves of EGSA with different population size in the complex environment 4.

Figure 28. Boxplots of the results obtained by EGSA with different population size in the complex environment 3.

Figure 29.
The mean running time of EGSA with different population size
 $N$
.
$N$
.
4.6. Parameter analysis
As we know, the population size
 $N$
can affect the performance of algorithm. If
$N$
can affect the performance of algorithm. If
 $N$
is too small, it will harm the convergence of the population to the optimal solution. On the contrary, too large
$N$
is too small, it will harm the convergence of the population to the optimal solution. On the contrary, too large
 $N$
will consume more computing resource. Here, to observe the influence of parameter
$N$
will consume more computing resource. Here, to observe the influence of parameter
 $N$
on our proposed algorithm, all the parameters in EGSA remain the same except for the population size
$N$
on our proposed algorithm, all the parameters in EGSA remain the same except for the population size
 $N$
, the population
$N$
, the population
 $N$
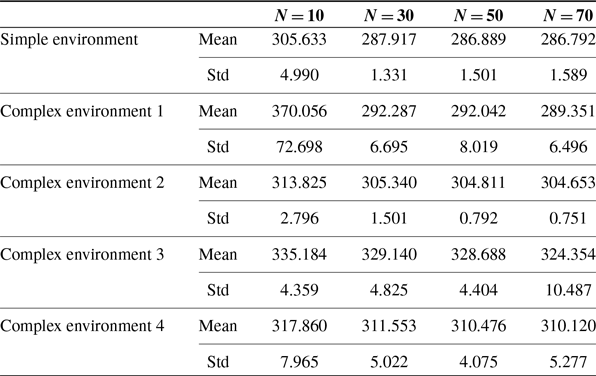
is set to 10, 30, 50, and 70 in simple and complex environments, respectively. Figure 19, Fig. 21, Fig. 23, Fig. 25, and Fig. 27 show the average convergence with iteration in different environments, respectively. The convergence rates are very similar when the populations are 30, 50, and 70, respectively. The boxplots with diverse population sizes for three environments are revealed in Fig. 20, Fig. 22, Fig. 24, Fig. 26, and Fig. 28, respectively. Figure 29 describes the running time for our proposed path planning method in three environments, showing that the running time increases with the population size. Table VI represents the mean and Std of overall cost values for various environments with different population sizes. It is obvious that the performance of EGSA becomes better with the increase of population size
$N$
is set to 10, 30, 50, and 70 in simple and complex environments, respectively. Figure 19, Fig. 21, Fig. 23, Fig. 25, and Fig. 27 show the average convergence with iteration in different environments, respectively. The convergence rates are very similar when the populations are 30, 50, and 70, respectively. The boxplots with diverse population sizes for three environments are revealed in Fig. 20, Fig. 22, Fig. 24, Fig. 26, and Fig. 28, respectively. Figure 29 describes the running time for our proposed path planning method in three environments, showing that the running time increases with the population size. Table VI represents the mean and Std of overall cost values for various environments with different population sizes. It is obvious that the performance of EGSA becomes better with the increase of population size
 $N$
, but in both cases of
$N$
, but in both cases of
 $N=50$
and
$N=50$
and
 $N=70$
, the performance of EGSA is not very different, the performance improvement is very small for
$N=70$
, the performance of EGSA is not very different, the performance improvement is very small for
 $N$
increasing from 50 to 70. So, a compromise between the obtained path length and the running time is made, and 50 is set as the size of the population.
$N$
increasing from 50 to 70. So, a compromise between the obtained path length and the running time is made, and 50 is set as the size of the population.
5. Conclusion
In this work, a UAV path planning algorithm in 3D space based on EGSA is presented. For EGSA, the balance between exploration and exploitation is strengthened, adding the memory and random disturbance ability to each particle in the population. The path can be achieved by connecting these nodes obtained by EGSA, considering the path length, yaw angle, pitch angle, and flight altitude. EGSA is compared with seven peer algorithms on CEC 2020 benchmark functions, such as MFO, GSA, CKGSA, GGSA, GPSOGSA, HGSPSO, and LKGSA, demonstrating that EGSA has superiority over the other algorithms. The experimental results of UAV path planning illustrate that the path planning method based on EGSA is more effective than the other seven methods. The influence of population size on our proposed algorithm is also analyzed and the appropriate population size is given.
In future research, our work will mainly focus on two interesting topics, one is the path planning of multiple UAVs, considering the collaboration and constraints between UAVs, and the other one is to use UAVs to verify the proposed algorithm in reality.
Table VI. The simulation results of EGSA with different population size.
Author contribution
Keming Jiao designed the research, implemented the system, and drafted the paper. Jie Chen, Bin Xin, and Li Li helped organize the paper, revised and finalized the paper. Yifan Zheng and Zhixin Zhao collected the data.
Financial support
This work was supported in part by the National Outstanding Youth Talents Support Program 61822304, the National Natural Science Foundation of China under Grant 72171172, the National Natural Science Foundation of China Basic Science Research Center Program under Grant 62088101, the National Key R&D Program of China (No. 2018YFB1308000, 2018YFB1305304), Shanghai Municipal Science and Technology Major Project under Grant 2021SHZDZX0100, Shanghai Science and Technology Pilot Project under Grant 19511132100, and sponsored by Peng Cheng Laboratory and Beijing Advanced Innovation Center for Intelligent Robots and Systems.
Competing interests
Keming Jiao, Jie Chen, Bin Xin, Li Li, Yifan Zheng and Zhixin Zhao declare that they have no conflict of interest.






































