




1. Introduction
Let φ be a continuous flow on  $\mathbb{R}^3$. We focus on some compact region of interest
$\mathbb{R}^3$. We focus on some compact region of interest  $N \subseteq \mathbb{R}^3$ in phase space and want to obtain information about the largest invariant set K it contains. Typically, K cannot be computed explicitly and indirect methods are needed. For instance, Ważewski’s principle ([Reference Ważewski14]) can be used to analyse whether
$N \subseteq \mathbb{R}^3$ in phase space and want to obtain information about the largest invariant set K it contains. Typically, K cannot be computed explicitly and indirect methods are needed. For instance, Ważewski’s principle ([Reference Ważewski14]) can be used to analyse whether  $K \neq \emptyset$ or, in a smooth setting, the Poincaré–Hopf theorem can detect the presence of rest points in K. The important feature of these tools is that they only require that one knows how the trajectories of the flow cross the boundary of N and this is usually computable. For example, if the flow is generated by a vectorfield X through a differential equation, then X alone already provides these data without the need to integrate the equation.
$K \neq \emptyset$ or, in a smooth setting, the Poincaré–Hopf theorem can detect the presence of rest points in K. The important feature of these tools is that they only require that one knows how the trajectories of the flow cross the boundary of N and this is usually computable. For example, if the flow is generated by a vectorfield X through a differential equation, then X alone already provides these data without the need to integrate the equation.
The information about K provided by these tools is limited. In this article we obtain a criterion that still uses the same sort of data as an input and detects whether K must have a non-trivial one-dimensional homology. Thus, for instance, it can distinguish a situation where K is a rest point from another one where K is a rest point together with a homoclinic orbit. Obtaining homological information about K seems a natural problem and has already been studied in [Reference Conley and Easton2], [Reference Easton3], [Reference Gierzkiewicz and Wójcik5], [Reference Poźniak11], to cite a few. The main difficulty is, of course, that the region N and its maximal invariant subset K do not generally bear any direct geometric relationship whatsoever. The aforementioned articles are more ambitious than ours because they are valid in arbitrary dimensions or look for lower bounds on the rank of the homology of K, rather than just showing that it is non-trivial. However, for the setting considered in this article, our results are sharper and, in fact, we will prove that they are the sharpest possible given the data they take as an input.
Following the literature cited above (especially [Reference Conley and Easton2]) we will focus on a certain type of regions N called isolating blocks. To motivate the definition, suppose for a moment that the flow is generated by a smooth vectorfield X and N is a smooth manifold. At every point  $p \in \partial N$ the flow either enters or exits N transversally or is tangent to
$p \in \partial N$ the flow either enters or exits N transversally or is tangent to  $\partial N$. The latter happens precisely when
$\partial N$. The latter happens precisely when  $X(p) \cdot \nu(p) = 0$, where ν is a normal vectorfield along
$X(p) \cdot \nu(p) = 0$, where ν is a normal vectorfield along  $\partial N$. Perhaps after perturbing N (hence ν) very slightly we can achieve that X and ν be transverse, and then the implicit equation
$\partial N$. Perhaps after perturbing N (hence ν) very slightly we can achieve that X and ν be transverse, and then the implicit equation  $X \cdot \nu = 0$ determines a finite collection of mutually disjoint simple closed curves in
$X \cdot \nu = 0$ determines a finite collection of mutually disjoint simple closed curves in  $\partial N$. We call these the tangency curves of N, or t-curves for short, and use the letter τ to denote them generically. The manifold N is called an isolating block when all tangencies are external, i.e., whenever the flow is tangent to
$\partial N$. We call these the tangency curves of N, or t-curves for short, and use the letter τ to denote them generically. The manifold N is called an isolating block when all tangencies are external, i.e., whenever the flow is tangent to  $\partial N$ at some p, a short portion of the trajectory centred at p is disjoint from N except at the tangency point p itself. The definition in the topological case is a straightforward adaptation of this; it is given in § 2 together with some remarks about how restrictive the ‘no interior tangencies’ condition is.
$\partial N$ at some p, a short portion of the trajectory centred at p is disjoint from N except at the tangency point p itself. The definition in the topological case is a straightforward adaptation of this; it is given in § 2 together with some remarks about how restrictive the ‘no interior tangencies’ condition is.
Before stating our results we recall one last definition. A handlebody N is a compact 3-manifold homeomorphic to the standard model Hg of figure 1. The number  $g \geq 0$ is called the genus of the handlebody. A handlebody of genus 0 is a 3-ball; a handlebody of genus 1 is a solid torus. Notice that Hg is only an abstract model and a handlebody
$g \geq 0$ is called the genus of the handlebody. A handlebody of genus 0 is a 3-ball; a handlebody of genus 1 is a solid torus. Notice that Hg is only an abstract model and a handlebody  $N \subseteq \mathbb{R}^3$ can be knotted.
$N \subseteq \mathbb{R}^3$ can be knotted.

Figure 1. The standard model Hg for a handlebody of genus g.
There is a more intrinsic definition of handlebodies. Let N be a compact 3-manifold with boundary. A 2-disk  $D \subseteq N$ is properly embedded if
$D \subseteq N$ is properly embedded if  $D \cap \partial N = \partial D$. The disks
$D \cap \partial N = \partial D$. The disks  $\{D_i\}$ in figure 1 are all properly embedded. Notice that if Hg is cut along these disks, the resulting manifold is a 3-ball. This is a defining property of handlebodies: N is a handlebody of genus g if and only if it contains a collection of g mutually disjoint, properly embedded disks
$\{D_i\}$ in figure 1 are all properly embedded. Notice that if Hg is cut along these disks, the resulting manifold is a 3-ball. This is a defining property of handlebodies: N is a handlebody of genus g if and only if it contains a collection of g mutually disjoint, properly embedded disks  $\{D_i\}$ such that when N is cut along these disks, one obtains a 3-ball. The collection
$\{D_i\}$ such that when N is cut along these disks, one obtains a 3-ball. The collection  $\{D_i\}$ is called a (complete) cut system for N.
$\{D_i\}$ is called a (complete) cut system for N.
Our first result is the following:
Theorem 1.1 Let N be an isolating block and K its maximal (biggest) invariant subset. Assume that  $\partial N$ is connected (i.e., that N has no ‘cavities’). Then, if the one-dimensional cohomology of K is trivial, the following must hold:
$\partial N$ is connected (i.e., that N has no ‘cavities’). Then, if the one-dimensional cohomology of K is trivial, the following must hold:
(i) N is a handlebody.
(ii) There exists a complete system of cutting disks
 $\{D_i\}$ for N such that each curve $\partial D_i$ intersects the set of tangency curves $\bigcup \tau$ transversally at two points.
$\{D_i\}$ for N such that each curve $\partial D_i$ intersects the set of tangency curves $\bigcup \tau$ transversally at two points.



Here cohomology means Čech cohomology. In this context it is usually preferred over singular homology since it is better suited to compacta having a bad local structure (as may well be the case with an invariant compact set). One should think of theorem 1.1 as a criterion to ensure that K has a non-trivial one-dimensional cohomology: this will be the case whenever N is not a handlebody, or it is a handlebody but does not have a complete cut system as described in (ii).
Example 1.2. Suppose we observe one of the solid tori N depicted in figure 2 as an isolating block. Here, and in most subsequent figures, we follow the convention of painting transverse entry points white (or light grey) and transverse exit points dark grey.
For a solid torus a complete cut system consists of a single meridional disk which is unique up to isotopy, and this makes it easy to check condition (ii) in theorem 1.1. In panel (a), any meridian of  $\partial N$, however contorted, must intersect the four parallel tangency curves. Thus, by theorem 1.1, the maximal invariant subset of N must have a non-trivial one-dimensional cohomology. The solid torus N in panel (b) admits a slightly bent meridional disk D whose boundary (shown in a dotted outline) does satisfy condition (ii) of theorem 1.1, so we cannot draw any conclusion about the cohomology of its maximal invariant subset.
$\partial N$, however contorted, must intersect the four parallel tangency curves. Thus, by theorem 1.1, the maximal invariant subset of N must have a non-trivial one-dimensional cohomology. The solid torus N in panel (b) admits a slightly bent meridional disk D whose boundary (shown in a dotted outline) does satisfy condition (ii) of theorem 1.1, so we cannot draw any conclusion about the cohomology of its maximal invariant subset.

Figure 2. The biggest invariant subset of the solid torus in panel (a) must have a nontrivial cohomology.
The example in panel (a) is the simplest one where the condition of theorem 1.1(ii) is not satisfied. It was already considered by Conley and Easton ([Reference Conley and Easton2, section 3, pp. 47ff.]). We have constructed the example in panel (b) so that both have the same Conley index (namely  $\mathbb{S}^1 \vee \mathbb{S}^2$); this implies that other classical tools such as the Poincaré–Hopf theorem cannot tell apart the two situations ([Reference McCord9]).
$\mathbb{S}^1 \vee \mathbb{S}^2$); this implies that other classical tools such as the Poincaré–Hopf theorem cannot tell apart the two situations ([Reference McCord9]).
Recall that a closed curve in N is called essential if it is not contractible. One has the following easy generalization of Example 1.2(a):
Example 1.3. Let an isolating block N be a handlebody of genus g. If the number of essential tangency curves in N is  $ \gt 2g$, then K has a non-trivial cohomology.
$ \gt 2g$, then K has a non-trivial cohomology.
To prove this, let  $\{D_i\}$ be a complete cut system for N and notice that if a tangency curve τ does not intersect any of the
$\{D_i\}$ be a complete cut system for N and notice that if a tangency curve τ does not intersect any of the  $\partial D_i$, then after cutting N open along the Di, the curve τ would remain untouched in the boundary of resulting 3-ball. Since it is evidently contractible in that ball, it is also contractible in N. It follows that every essential tangency curve in N must intersect at least one of the
$\partial D_i$, then after cutting N open along the Di, the curve τ would remain untouched in the boundary of resulting 3-ball. Since it is evidently contractible in that ball, it is also contractible in N. It follows that every essential tangency curve in N must intersect at least one of the  $\partial D_i$. Thus, if there are more than 2g of those curves in number, one of the
$\partial D_i$. Thus, if there are more than 2g of those curves in number, one of the  $\partial D_i$ must intersect the system of tangency curves more than twice and the result follows from theorem 1.1(ii).
$\partial D_i$ must intersect the system of tangency curves more than twice and the result follows from theorem 1.1(ii).
It is interesting to observe that, at least in the smooth setting, the non-trivial cohomology detected by theorem 1.1 is stable under small perturbations of the flow:
Remark 1.4. Let N be an isolating block for a smooth flow φ. Suppose that by using the criterion provided by (the counterpositive of) theorem 1.1, we know that the maximal invariant subset K of N has a non-trivial one-dimensional cohomology. Then there exists δ > 0 such that for any smooth flow  $\varphi'$ which is δ-close to φ over N, the maximal invariant subset of N (with respect to
$\varphi'$ which is δ-close to φ over N, the maximal invariant subset of N (with respect to  $\varphi^{\prime}$) also has a non-trivial one-dimensional cohomology.
$\varphi^{\prime}$) also has a non-trivial one-dimensional cohomology.
The condition that φ and  $\varphi'$ be δ-close over N means that
$\varphi'$ be δ-close over N means that  $\|X(p) - X^{\prime}(p)\| \lt \delta$ for every
$\|X(p) - X^{\prime}(p)\| \lt \delta$ for every  $p \in N$, where X and X ʹ are the velocity vectorfields of the flows. With N and φ as above, a stability theorem of Conley and Easton ([Reference Conley and Easton2, theorem 1.6, p. 39]) states the following: for every ϵ > 0 there exists δ > 0 with the property that for any flow
$p \in N$, where X and X ʹ are the velocity vectorfields of the flows. With N and φ as above, a stability theorem of Conley and Easton ([Reference Conley and Easton2, theorem 1.6, p. 39]) states the following: for every ϵ > 0 there exists δ > 0 with the property that for any flow  $\varphi'$ which is δ-close to φ over N there exists a homeomorphism h of
$\varphi'$ which is δ-close to φ over N there exists a homeomorphism h of  $\mathbb{R}^3$ that moves points less than ϵ and carries N onto an isolating block
$\mathbb{R}^3$ that moves points less than ϵ and carries N onto an isolating block  $N^{\prime} := h(N)$ for
$N^{\prime} := h(N)$ for  $\varphi'$; moreover, h carries the tangency curves of N onto the tangency curves of N ʹ. Since both conditions of theorem 1.1 are invariant under such a homeomorphism and N failed to satisfy at least one of them by assumption (for φ), the same is true of N ʹ (for
$\varphi'$; moreover, h carries the tangency curves of N onto the tangency curves of N ʹ. Since both conditions of theorem 1.1 are invariant under such a homeomorphism and N failed to satisfy at least one of them by assumption (for φ), the same is true of N ʹ (for  $\varphi^{\prime}$). Thus, the maximal invariant subset of N ʹ for
$\varphi^{\prime}$). Thus, the maximal invariant subset of N ʹ for  $\varphi'$ must have a non-trivial one-dimensional cohomology. By choosing ϵ sufficiently small (so that N and N ʹ are very close to each other) and perhaps reducing δ, we can ensure that the maximal invariant subset of N and of N ʹ for
$\varphi'$ must have a non-trivial one-dimensional cohomology. By choosing ϵ sufficiently small (so that N and N ʹ are very close to each other) and perhaps reducing δ, we can ensure that the maximal invariant subset of N and of N ʹ for  $\varphi^{\prime}$ is the same, and the remark follows.
$\varphi^{\prime}$ is the same, and the remark follows.
Next we consider how sharp the criterion provided by theorem 1.1 is. To discuss this, it is convenient to introduce a definition. Let N be a compact 3-manifold. A colouring of N means a decomposition  $\partial N = P \cup Q$ where P and Q are compact 2-manifolds (possibly empty) with a common boundary
$\partial N = P \cup Q$ where P and Q are compact 2-manifolds (possibly empty) with a common boundary  $\partial P = \partial Q = P \cap Q$. We think of the interiors of P and Q as being painted white and grey, say. Clearly,
$\partial P = \partial Q = P \cap Q$. We think of the interiors of P and Q as being painted white and grey, say. Clearly,  $P \cap Q$ is a finite collection of disjoint simple closed curves τ, which we call the t-curves of N. Of course, this is just a topological abstraction of the ‘entry, exit, tangency’ information carried by the boundary of an isolating block. Given a coloured manifold
$P \cap Q$ is a finite collection of disjoint simple closed curves τ, which we call the t-curves of N. Of course, this is just a topological abstraction of the ‘entry, exit, tangency’ information carried by the boundary of an isolating block. Given a coloured manifold  $(N,P,Q)$ in
$(N,P,Q)$ in  $\mathbb{R}^3$, we say that a flow in
$\mathbb{R}^3$, we say that a flow in  $\mathbb{R}^3$ realizes N as an isolating block if every p lying on a t-curve is an exterior tangency and every point in the interior of P (resp. of Q) is a transverse entry (resp. exit) point.
$\mathbb{R}^3$ realizes N as an isolating block if every p lying on a t-curve is an exterior tangency and every point in the interior of P (resp. of Q) is a transverse entry (resp. exit) point.
Theorem 1.5 Let  $(N,P,Q) \subseteq \mathbb{R}^3$ be a (tame) coloured manifold that satisfies conditions (i) and (ii) in theorem 1.1. Then there exists a flow on
$(N,P,Q) \subseteq \mathbb{R}^3$ be a (tame) coloured manifold that satisfies conditions (i) and (ii) in theorem 1.1. Then there exists a flow on  $\mathbb{R}^3$ which realizes N as an isolating block whose maximal invariant subset K is a single rest point.
$\mathbb{R}^3$ which realizes N as an isolating block whose maximal invariant subset K is a single rest point.
This means that the criterion provided by theorem 1.1 is as sharp as the information about the colouring of an isolating block N allows. For instance, in example 1.2, we did not reach any conclusion about the isolating block N shown in panel (b); now we know that there actually exists a flow in  $\mathbb{R}^3$ which realizes N as an isolating block for a single rest point. Notice also the following. If we start with an isolating block N (with a connected boundary) whose maximal invariant subset K has a trivial one-dimensional cohomology, by applying theorems 1.1 and 1.5 successively we conclude that there exists a flow in
$\mathbb{R}^3$ which realizes N as an isolating block for a single rest point. Notice also the following. If we start with an isolating block N (with a connected boundary) whose maximal invariant subset K has a trivial one-dimensional cohomology, by applying theorems 1.1 and 1.5 successively we conclude that there exists a flow in  $\mathbb{R}^3$ which realizes N as an isolating block with the same colouring (i.e., with the same set of tangency curves and transverse entry and exit sets) but whose maximal invariant subset is a single rest point. In other words, there is no way to distinguish a maximal invariant subset K with a trivial one-dimensional cohomology from a single rest point only using information from the boundary of an isolating block.
$\mathbb{R}^3$ which realizes N as an isolating block with the same colouring (i.e., with the same set of tangency curves and transverse entry and exit sets) but whose maximal invariant subset is a single rest point. In other words, there is no way to distinguish a maximal invariant subset K with a trivial one-dimensional cohomology from a single rest point only using information from the boundary of an isolating block.
Of the two conditions in theorem 1.1 it is (ii) that is difficult to check in practice because cut systems of a handlebody N are highly non-unique (for genus  $g \geq 2$). We shall call this condition the ‘geometric criterion’ for brevity. When N is a 3-ball, it evidently satisfies the condition regardless of its colouring since complete cut systems are empty. When N is a solid torus, one can easily show that it satisfies the geometric criterion if and only if it contains at most two essential t-curves. For handlebodies of genus
$g \geq 2$). We shall call this condition the ‘geometric criterion’ for brevity. When N is a 3-ball, it evidently satisfies the condition regardless of its colouring since complete cut systems are empty. When N is a solid torus, one can easily show that it satisfies the geometric criterion if and only if it contains at most two essential t-curves. For handlebodies of genus  $g \geq 2$, a hands-on analysis becomes almost impossible. Our last theorem provides an algorithm that checks whether a coloured handlebody satisfies the geometric criterion. We need a preliminary discussion.
$g \geq 2$, a hands-on analysis becomes almost impossible. Our last theorem provides an algorithm that checks whether a coloured handlebody satisfies the geometric criterion. We need a preliminary discussion.
Let N be a handlebody with an entirely arbitrary complete cut system  $\{D_1,\ldots,D_g\}$. Assign to each disk Di a little arrow transverse to it to indicate a positive crossing direction. Now, given any oriented simple closed curve s in N, we can manufacture a word W in the letters
$\{D_1,\ldots,D_g\}$. Assign to each disk Di a little arrow transverse to it to indicate a positive crossing direction. Now, given any oriented simple closed curve s in N, we can manufacture a word W in the letters  $x_1^{\pm 1},\ldots,x_g^{\pm 1}$ by travelling once along the curve and recording all encounters with the cutting disks by writing
$x_1^{\pm 1},\ldots,x_g^{\pm 1}$ by travelling once along the curve and recording all encounters with the cutting disks by writing  $x_i^{\pm 1}$ whenever s crosses Di, with the exponent ±1 indicating whether the crossing takes place in the positive direction. If the curve s is disjoint from all the disks in the cut system, the word W is empty and we write W = 1. (The reader might recognize this as a procedure to express the free homotopy class of s in the fundamental group of N, which is a free group on the generators
$x_i^{\pm 1}$ whenever s crosses Di, with the exponent ±1 indicating whether the crossing takes place in the positive direction. If the curve s is disjoint from all the disks in the cut system, the word W is empty and we write W = 1. (The reader might recognize this as a procedure to express the free homotopy class of s in the fundamental group of N, which is a free group on the generators  $\{x_i\}$.)
$\{x_i\}$.)
Given any (finite) set S of words in the letters  $x_i^{\pm 1}$, there is a certain purely combinatorial algorithm, called Whitehead reduction, that returns another set of words S min in the same letters. Very roughly speaking, this process attempts to reduce the length of the words in S by performing certain substitutions and cancellations; the set S min it returns has the property that the total length of its words cannot be reduced further. We will describe this in § 5. For the moment, this rough idea is enough to state our last theorem:
$x_i^{\pm 1}$, there is a certain purely combinatorial algorithm, called Whitehead reduction, that returns another set of words S min in the same letters. Very roughly speaking, this process attempts to reduce the length of the words in S by performing certain substitutions and cancellations; the set S min it returns has the property that the total length of its words cannot be reduced further. We will describe this in § 5. For the moment, this rough idea is enough to state our last theorem:
Theorem 1.6 Let N be a coloured handlebody having at least one t-curve. Orient its t-curves as the boundary of the dark grey region (say). Choose any complete cut system  $\{D_i\}$ and read the t-curves as explained above to produce a set of words S in the letters
$\{D_i\}$ and read the t-curves as explained above to produce a set of words S in the letters  $x_i^{\pm 1}$. Perform Whitehead reduction to obtain a new set S min. Then, N satisfies the geometric criterion (i.e., condition (ii) of theorem 1.1) if and only if S min satisfies the following:
$x_i^{\pm 1}$. Perform Whitehead reduction to obtain a new set S min. Then, N satisfies the geometric criterion (i.e., condition (ii) of theorem 1.1) if and only if S min satisfies the following:
(A) For every i, the letters  $x_i^{\pm 1}$ either do not appear at all among the words in S min or both appear, exactly once each.
$x_i^{\pm 1}$ either do not appear at all among the words in S min or both appear, exactly once each.
The advantage of the algebraic criterion (A) over the geometric criterion of theorem 1.1 is that it is no longer formulated in existential terms and is algorithmically checkable. Notice also that the assumption that N has at least one t-curve is inconsequential since otherwise N cannot satisfy the geometric criterion anyway (unless it is a 3-ball). In fact, there is a good dynamical explanation for this. If N has no t-curves, it must be painted in just one colour, say white. This means that it will be positively invariant for any flow φ that realizes it, and then, its maximal invariant subset K is an attractor with  $H^*(K) = H^*(N) \neq 0$ (a result of Hastings [Reference Hastings6]) regardless of the details of the flow.
$H^*(K) = H^*(N) \neq 0$ (a result of Hastings [Reference Hastings6]) regardless of the details of the flow.
We illustrate theorem 1.6 with an example:
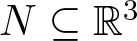
Example 1.7. Suppose we observe an isolating block N which is a handlebody of genus 2 with the system of tangency curves  $\{\tau\}$ shown (in a top view of the handlebody) in figure 3.
$\{\tau\}$ shown (in a top view of the handlebody) in figure 3.
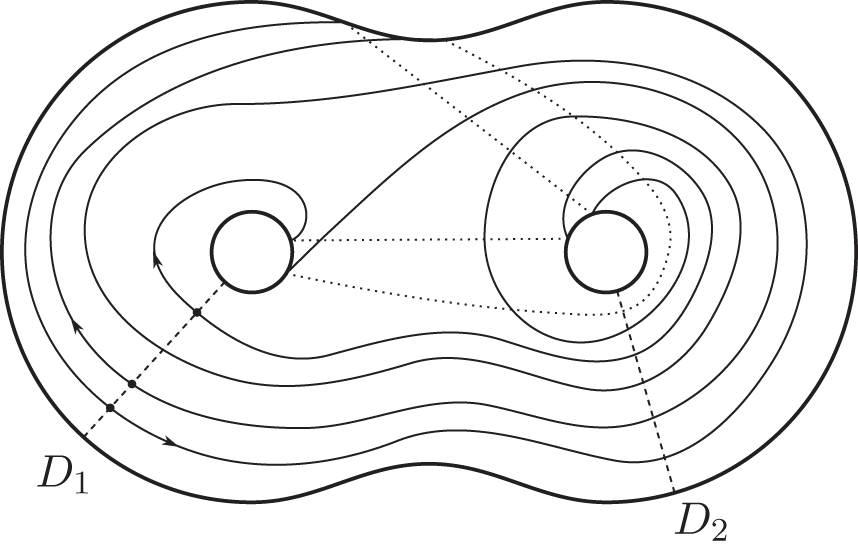
Figure 3. A genus 2 handlebody with a complicated system of t-curves.
We choose the standard cut system  $\{D_1,D_2\}$ represented by the dashed radial lines. It is clear that the example does not satisfy condition (ii) of theorem 1.1 for that particular cut system; D 1 and D 2 intersect
$\{D_1,D_2\}$ represented by the dashed radial lines. It is clear that the example does not satisfy condition (ii) of theorem 1.1 for that particular cut system; D 1 and D 2 intersect  $\bigcup \tau$ a total of 4 and 6 times, respectively. To apply theorem 1.6, we orient all three t-curves as indicated by the arrows; we also let counterclockwise crossings of the Di be recorded with a +1 exponent. We start reading each curve from the thick dot lying on D 1. The words spelled by the t-curves are then
$\bigcup \tau$ a total of 4 and 6 times, respectively. To apply theorem 1.6, we orient all three t-curves as indicated by the arrows; we also let counterclockwise crossings of the Di be recorded with a +1 exponent. We start reading each curve from the thick dot lying on D 1. The words spelled by the t-curves are then  $S = \{x_1 x_2 x_1 x_2 x_2, x_1^{-1}x_2^{-1}x_2^{-1},x_1^{-1}x_2^{-1}\}$. After performing Whitehead reduction, we get
$S = \{x_1 x_2 x_1 x_2 x_2, x_1^{-1}x_2^{-1}x_2^{-1},x_1^{-1}x_2^{-1}\}$. After performing Whitehead reduction, we get  $S_{\rm min} = \{x_1x_2,x_1^{-1},x_2^{-1}\}$, which satisfies (A). Hence, condition (ii) of theorem 1.1 is verified for some cut system
$S_{\rm min} = \{x_1x_2,x_1^{-1},x_2^{-1}\}$, which satisfies (A). Hence, condition (ii) of theorem 1.1 is verified for some cut system  $\{D'_i\}$, although it is not at all obvious in the figure what that system might look like. Dynamically, we cannot conclude anything about the cohomology of the maximal invariant subset of N and, in fact, by theorem 1.5 there even exists a flow in
$\{D'_i\}$, although it is not at all obvious in the figure what that system might look like. Dynamically, we cannot conclude anything about the cohomology of the maximal invariant subset of N and, in fact, by theorem 1.5 there even exists a flow in  $\mathbb{R}^3$ which realizes this pattern of tangency curves on N and has a single rest point inside N as its maximal invariant subset (visualizing such a flow seems difficult).
$\mathbb{R}^3$ which realizes this pattern of tangency curves on N and has a single rest point inside N as its maximal invariant subset (visualizing such a flow seems difficult).
The article is organized as follows: § 2 contains some preliminary definitions; § 3 and § 4 are devoted to proving theorems 1.1 and 1.5, respectively; theorem 1.6 is proved in § 5 after recalling some algebraic preliminaries; finally, a brief § 6 discusses ‘how likely’ it is for a coloured handlebody to satisfy the geometric criterion in theorem 1.1 or, dynamically, for an isolating handlebody to actually isolate an invariant set with a trivial cohomology.
2. Preliminary definitions
2.1.
We will denote the boundary of a manifold N by  $\partial N$ and its interior by
$\partial N$ and its interior by  ${\rm Int}\ N$. The word ‘interior’ will almost always be used with this meaning and not as the topological interior of a subset of some other set. A manifold
${\rm Int}\ N$. The word ‘interior’ will almost always be used with this meaning and not as the topological interior of a subset of some other set. A manifold  $N \subseteq \mathbb{R}^3$ is tame if there exists a homeomorphism of
$N \subseteq \mathbb{R}^3$ is tame if there exists a homeomorphism of  $\mathbb{R}^3$ which sends N onto a polyhedral set (equivalently, onto a smooth submanifold). Tameness is a technical condition that is, in practice, always warranted. Saying that N is tame is equivalent to requiring that it can be collared in
$\mathbb{R}^3$ which sends N onto a polyhedral set (equivalently, onto a smooth submanifold). Tameness is a technical condition that is, in practice, always warranted. Saying that N is tame is equivalent to requiring that it can be collared in  $\mathbb{R}^3$.
$\mathbb{R}^3$.
Since an invariant compactum K may have bad local topological properties it is convenient to focus on its Čech cohomology rather than its singular homology, because the former generally captures more information. It will suffice, and actually be convenient for some proofs, to take coefficients in  $\mathbb{Z}_2$. Thus, from now on
$\mathbb{Z}_2$. Thus, from now on  $H^*$ denotes Čech cohomology with
$H^*$ denotes Čech cohomology with  $\mathbb{Z}_2$ coefficients. Notice that for a locally contractible space (such as a manifold, or a polyhedron), this coincides with singular cohomology. Details about Čech cohomology can be found in [Reference Eilenberg and Steenrod4] or [Reference Spanier13], but the reader unfamiliar with it may just prefer to interpret
$\mathbb{Z}_2$ coefficients. Notice that for a locally contractible space (such as a manifold, or a polyhedron), this coincides with singular cohomology. Details about Čech cohomology can be found in [Reference Eilenberg and Steenrod4] or [Reference Spanier13], but the reader unfamiliar with it may just prefer to interpret  $H^*$ as singular cohomology; the proofs should still make sense (mostly).
$H^*$ as singular cohomology; the proofs should still make sense (mostly).
2.2.
Let  $\varphi : \mathbb{R}^3 \times \mathbb{R} \longrightarrow \mathbb{R}^3$ be a flow in
$\varphi : \mathbb{R}^3 \times \mathbb{R} \longrightarrow \mathbb{R}^3$ be a flow in  $\mathbb{R}^3$. We abbreviate
$\mathbb{R}^3$. We abbreviate  $\varphi(p,t)$ by
$\varphi(p,t)$ by  $p \cdot t$. Let
$p \cdot t$. Let  $N \subseteq \mathbb{R}^3$ be a compact 3-manifold.
$N \subseteq \mathbb{R}^3$ be a compact 3-manifold.
We shall say that a point  $p \in \partial N$ is a transverse (i) entry or (ii) exit point if there exists an ϵ > 0 such that either (i)
$p \in \partial N$ is a transverse (i) entry or (ii) exit point if there exists an ϵ > 0 such that either (i)  $p \cdot (-\epsilon,0) \cap N = \emptyset$ and
$p \cdot (-\epsilon,0) \cap N = \emptyset$ and  $p \cdot (0,\epsilon) \subseteq {\rm Int}\ N$ or (ii)
$p \cdot (0,\epsilon) \subseteq {\rm Int}\ N$ or (ii)  $p \cdot (-\epsilon,0) \subseteq {\rm Int}\ N$ and
$p \cdot (-\epsilon,0) \subseteq {\rm Int}\ N$ and  $p \cdot (0,\epsilon) \cap N = \emptyset$. Similarly, p is an exterior tangency if
$p \cdot (0,\epsilon) \cap N = \emptyset$. Similarly, p is an exterior tangency if  $p \cdot (-\epsilon,0) \cap N = \emptyset = p \cdot (0,\epsilon) \cap N$.
$p \cdot (-\epsilon,0) \cap N = \emptyset = p \cdot (0,\epsilon) \cap N$.
Definition 2.1. An isolating block N is a tame compact 3-manifold  $N \subseteq \mathbb{R}^3$ whose boundary
$N \subseteq \mathbb{R}^3$ whose boundary  $\partial N$ is the union of two compact 2-manifolds Ni and No (one may be possibly empty) with a common boundary
$\partial N$ is the union of two compact 2-manifolds Ni and No (one may be possibly empty) with a common boundary  $\partial N^i = \partial N^o = N^i \cap N^o$ and such that:
$\partial N^i = \partial N^o = N^i \cap N^o$ and such that:
(i) every
$p \in {\rm Int}\ N^i$ is a transverse entry point,(ii) every
$p \in {\rm Int}\ N^o$ is a transverse exit point,(iii) every
$p \in N^i \cap N^o$ is an exterior tangency.



The superscripts in Ni and No stand for ‘in’ and ‘out’ and suggest where the flow is heading. As mentioned previously, each component of  $N^i \cap N^o$ is called a tangency curve, or a t-curve for short. Notice that the maximal invariant subset K of N is contained in its interior because there are no interior tangencies to
$N^i \cap N^o$ is called a tangency curve, or a t-curve for short. Notice that the maximal invariant subset K of N is contained in its interior because there are no interior tangencies to  $\partial N$.
$\partial N$.
Remark 2.2. We make a brief comment about how restrictive the definition of an isolating block is. Suppose K is a compact invariant set for a continuous flow in a 3-manifold without boundary. Assume that K is isolated in the sense of Conley, i.e., it has a compact neighbourhood N 1 such that K is the largest invariant subset of N 1. Then, N 1 contains an isolating block N for K (proved in [Reference Sánchez-Gabites12] by blending ideas from [Reference Conley and Easton2] and [Reference Gierzkiewicz and Wójcik5]), and so from a theoretical point of view every isolated invariant compact set in  $\mathbb{R}^3$ can be analysed with the results in this article. Under favourable circumstances, it is even possible to compute an isolating block N explicitly (see [Reference Boczko, Kalies and Mischaikow1]).
$\mathbb{R}^3$ can be analysed with the results in this article. Under favourable circumstances, it is even possible to compute an isolating block N explicitly (see [Reference Boczko, Kalies and Mischaikow1]).
For any  $p \in N$, we define its exit time as
$p \in N$, we define its exit time as
 \begin{equation*}t^o(p) := \sup\ \{t \in [0,+\infty) : p \cdot [0,t] \subseteq N\}.\end{equation*}
\begin{equation*}t^o(p) := \sup\ \{t \in [0,+\infty) : p \cdot [0,t] \subseteq N\}.\end{equation*} Notice that  $t^o(p) = +\infty$ precisely when the forward orbit of p is entirely contained in N; otherwise
$t^o(p) = +\infty$ precisely when the forward orbit of p is entirely contained in N; otherwise  $t^o(p) \lt + \infty$ is the time it takes the forward orbit of p to leave N. Because the trajectories cannot slide along
$t^o(p) \lt + \infty$ is the time it takes the forward orbit of p to leave N. Because the trajectories cannot slide along  $\partial N$ in an isolating block, one can easily show that
$\partial N$ in an isolating block, one can easily show that  $p \cdot (0,t^o(p)) \subseteq {\rm Int}\ N$, and when
$p \cdot (0,t^o(p)) \subseteq {\rm Int}\ N$, and when  $0 \lt t^o(p) \lt +\infty$, the point
$0 \lt t^o(p) \lt +\infty$, the point  $p \cdot t^o(p)$ is a transverse exit point. In particular, points close to p will have a similar exit time; it then follows that
$p \cdot t^o(p)$ is a transverse exit point. In particular, points close to p will have a similar exit time; it then follows that  $t^o : N \longrightarrow [0,+\infty]$ is a continuous map.
$t^o : N \longrightarrow [0,+\infty]$ is a continuous map.
2.3.
We adapt the usual notion of ‘cutting a manifold along a disk’ to coloured manifolds as follows. Let  $(N,P,Q)$ be a coloured 3-manifold with t-curves
$(N,P,Q)$ be a coloured 3-manifold with t-curves  $\{\tau\}$. A cutting disk for N means a disk
$\{\tau\}$. A cutting disk for N means a disk  $D \subseteq N$ such that:
$D \subseteq N$ such that:
(i) D has a (topological) regular neighbourhood in N, i.e., a neighbourhood U such that
$(U,U \cap \partial N) \cong (D,\partial D) \times [-2,2]$ via a homeomorphism that carries $x \in D \subseteq U$ to $(x,0) \in D \times \{0\}$.(ii) condition (i) implies that
$D \cap \partial N = \partial D$ (i.e., D is properly embedded in N); we further require that $\partial D$ intersects $\bigcup \tau$ exactly twice, transversally.






We will often abuse notation and write  $D \times [-2,2]$ instead of U. Condition (i) is needed to avoid wild disks, which are known to exist in 3 dimensions. It is automatically satisfied when working in the piecewise linear or smooth category letting U be a regular or tubular neighbourhood of D, respectively. In (ii), ‘transversally’ should be understood in the obvious topological sense: if p is a point of intersection of
$D \times [-2,2]$ instead of U. Condition (i) is needed to avoid wild disks, which are known to exist in 3 dimensions. It is automatically satisfied when working in the piecewise linear or smooth category letting U be a regular or tubular neighbourhood of D, respectively. In (ii), ‘transversally’ should be understood in the obvious topological sense: if p is a point of intersection of  $\partial D$ and some t-curve τ, a short arc of
$\partial D$ and some t-curve τ, a short arc of  $\partial D$ centred at p should have one of its halves on the grey side of τ and the other on its white side. By reparameterizing U, we can (and will) assume that for each
$\partial D$ centred at p should have one of its halves on the grey side of τ and the other on its white side. By reparameterizing U, we can (and will) assume that for each  $t \in [-2,2]$, the boundary of the slice
$t \in [-2,2]$, the boundary of the slice  $D \times \{t\}$ of U intersects
$D \times \{t\}$ of U intersects  $\bigcup \tau$ in the same way as the boundary of D (i.e., it intersects the same t-curves, and transversally). The picture conveyed by this definition is that of figure 4(a).
$\bigcup \tau$ in the same way as the boundary of D (i.e., it intersects the same t-curves, and transversally). The picture conveyed by this definition is that of figure 4(a).
Cutting N along D means removing from N the set  $D \times (-1,1)$ to obtain a new 3-manifold N ʹ. One has
$D \times (-1,1)$ to obtain a new 3-manifold N ʹ. One has
 \begin{equation*}\partial N^{\prime} = \partial N \setminus (\partial D) \times [-1,1] \cup D \times \{\pm 1\}\end{equation*}
\begin{equation*}\partial N^{\prime} = \partial N \setminus (\partial D) \times [-1,1] \cup D \times \{\pm 1\}\end{equation*} so most of the points of the boundary of N ʹ inherit a colouring from N; only points in the interior of the two ‘cutting disks’  $D \times \{\pm 1\}$ remain uncoloured. We shall denote these disks by
$D \times \{\pm 1\}$ remain uncoloured. We shall denote these disks by  $D_{\pm}$ for brevity and often represent them in drawings filled with diagonal lines. See figure 4(b).
$D_{\pm}$ for brevity and often represent them in drawings filled with diagonal lines. See figure 4(b).
We will usually start with N being a tame subset of  $\mathbb{R}^3$ (or some other ambient 3-manifold). Removing only
$\mathbb{R}^3$ (or some other ambient 3-manifold). Removing only  $D \times (-1,1)$ instead of
$D \times (-1,1)$ instead of  $D \times (-2,2)$ from N ensures that N ʹ is still tame in
$D \times (-2,2)$ from N ensures that N ʹ is still tame in  $\mathbb{R}^3$.
$\mathbb{R}^3$.

Figure 4. Cutting a coloured manifold N along the disk D.
3. Proof of theorem 1.1
The basic structure of the proof goes as follows. Let  $N \subseteq \mathbb{R}^3$ be an isolating block with a connected boundary. Consider the inclusion induced homomorphism
$N \subseteq \mathbb{R}^3$ be an isolating block with a connected boundary. Consider the inclusion induced homomorphism  $H^1(N) \longrightarrow H^1(K)$. We will show how to use (certain) elements in the kernel of this map to construct cutting disks D for N that are transverse to
$H^1(N) \longrightarrow H^1(K)$. We will show how to use (certain) elements in the kernel of this map to construct cutting disks D for N that are transverse to  $\bigcup \tau$. Cutting N along these disks produces an N ʹ such that
$\bigcup \tau$. Cutting N along these disks produces an N ʹ such that  $H^1(N') \longrightarrow H^1(K)$ is injective (i.e., all elements in its kernel have been removed). Thus, if K has a trivial one-dimensional cohomology, so does this N ʹ. Theorem 1.1 then follows easily.
$H^1(N') \longrightarrow H^1(K)$ is injective (i.e., all elements in its kernel have been removed). Thus, if K has a trivial one-dimensional cohomology, so does this N ʹ. Theorem 1.1 then follows easily.
This technique was already used in [Reference Sánchez-Gabites12] to establish a certain ‘handle decomposition theorem’ of isolating blocks. For the purposes of that article, we could assume that K had finitely many connected components. Since here the basic tenet is that K is completely unknown, this assumption has to be removed and makes the analysis slightly more delicate.
3.1.
First we explain how the cutting disks will be constructed. Denote by  $n^+$ the subset of points in Ni whose forward trajectory never exits N, or equivalently
$n^+$ the subset of points in Ni whose forward trajectory never exits N, or equivalently  $t^o(p) = +\infty$. Let γ be an arc properly embedded in Ni; this means that
$t^o(p) = +\infty$. Let γ be an arc properly embedded in Ni; this means that  $\gamma \cap \partial N^i = \partial \gamma$. Assume that γ does not intersect
$\gamma \cap \partial N^i = \partial \gamma$. Assume that γ does not intersect  $n^+$, so that each
$n^+$, so that each  $p \in \gamma$ exits N in a finite time
$p \in \gamma$ exits N in a finite time  $t^o(p)$. Then, the set
$t^o(p)$. Then, the set
 \begin{equation*}D := \bigcup_{p \in \gamma} p \cdot [0,t^o(p)]\end{equation*}
\begin{equation*}D := \bigcup_{p \in \gamma} p \cdot [0,t^o(p)]\end{equation*} obtained by following each point in γ until it first exits N is a 2-disk properly embedded in N. We say that D is generated from γ by the flow. Notice that  $\partial D$ consists of the two arcs γ and
$\partial D$ consists of the two arcs γ and  $\{p \cdot t^o(p) : p \in \gamma\}$ which intersect exactly at their end points. It is therefore a simple closed curve that intersects
$\{p \cdot t^o(p) : p \in \gamma\}$ which intersect exactly at their end points. It is therefore a simple closed curve that intersects  $\bigcup \tau$ exactly twice (at the end points of γ) and transversally.
$\bigcup \tau$ exactly twice (at the end points of γ) and transversally.
To cut N along D we proceed as follows. Pick a thin strip  $E \subseteq N^i$ along γ, still disjoint from
$E \subseteq N^i$ along γ, still disjoint from  $n^+$. This E is a rectangle that intersects
$n^+$. This E is a rectangle that intersects  $\partial N^i$ exactly along its short sides and whose long sides run parallel to γ. Formally,
$\partial N^i$ exactly along its short sides and whose long sides run parallel to γ. Formally,  $(E,E \cap \partial N^i) \cong (\gamma,\partial \gamma) \times [-2,2]$, where γ corresponds to
$(E,E \cap \partial N^i) \cong (\gamma,\partial \gamma) \times [-2,2]$, where γ corresponds to  $\gamma \times \{0\}$. We then use the flow again to generate
$\gamma \times \{0\}$. We then use the flow again to generate
 \begin{equation*}U := \bigcup_{p \in E} p \cdot [0,t^o(p)],\end{equation*}
\begin{equation*}U := \bigcup_{p \in E} p \cdot [0,t^o(p)],\end{equation*} which is a thickening of D inside N, as described in § 2.3, and cut N along D to obtain the manifold N ʹ. The cutting disks  $D_{\pm} \subseteq \partial N'$ correspond to the disks generated by the long sides of the rectangle E. Notice that N ʹ contains K in its interior, and its entry and exit time maps are continuous, since they are restrictions of those of N. However, N ʹ is not an isolating block because the flow slides along the cutting disks
$D_{\pm} \subseteq \partial N'$ correspond to the disks generated by the long sides of the rectangle E. Notice that N ʹ contains K in its interior, and its entry and exit time maps are continuous, since they are restrictions of those of N. However, N ʹ is not an isolating block because the flow slides along the cutting disks  $D_{\pm}$ contained in its boundary. Every other point in
$D_{\pm}$ contained in its boundary. Every other point in  $\partial N'$ retains the nature (i.e., exterior tangency, transverse entry or exit point) it had prior to the cutting.
$\partial N'$ retains the nature (i.e., exterior tangency, transverse entry or exit point) it had prior to the cutting.
3.2.
Let  $D \subseteq N$ be a disk generated from an arc as described previously. This can be used to define a cohomology class
$D \subseteq N$ be a disk generated from an arc as described previously. This can be used to define a cohomology class  $w_D \in H^1(N)$, which acts on a homology class
$w_D \in H^1(N)$, which acts on a homology class  $[c] \in H_1(N)$ by taking a representative 1-chain c transverse to D and counting (modulo 2) the number of intersections of the 1-cycle c and D. Formally, the 2-cycle D represents a homology class
$[c] \in H_1(N)$ by taking a representative 1-chain c transverse to D and counting (modulo 2) the number of intersections of the 1-cycle c and D. Formally, the 2-cycle D represents a homology class  $[D] \in H_2(N,\partial N)$ and wD is its image under the Lefschetz duality isomorphism
$[D] \in H_2(N,\partial N)$ and wD is its image under the Lefschetz duality isomorphism  $H_2(N,\partial N) \cong H^1(N)$. It is clear that if O is a neighbourhood of K small enough that it is disjoint from D, then wD restricts to zero in
$H_2(N,\partial N) \cong H^1(N)$. It is clear that if O is a neighbourhood of K small enough that it is disjoint from D, then wD restricts to zero in  $H^1(O)$; thus, each wD belongs to the kernel of the inclusion induced map
$H^1(O)$; thus, each wD belongs to the kernel of the inclusion induced map  $H^1(N) \longrightarrow H^1(K)$. The following lemma provides a converse:
$H^1(N) \longrightarrow H^1(K)$. The following lemma provides a converse:
Lemma 3.1. Assume  $H^2(N,K) = 0$. Let γ run over all arcs properly embedded in
$H^2(N,K) = 0$. Let γ run over all arcs properly embedded in  $N^i - n^+$ and let D run over all the disks generated from these arcs by the flow. Then,
$N^i - n^+$ and let D run over all the disks generated from these arcs by the flow. Then,  $\{w_D\}$ generates the kernel of
$\{w_D\}$ generates the kernel of  $H^1(N) \longrightarrow H^1(K)$.
$H^1(N) \longrightarrow H^1(K)$.
We will prove the lemma in § 3.3. Let us admit it and continue our argument.
Focus on any one wD that is non-zero. Perform the cut-along D procedure described previously to obtain a new N ʹ. Observe that the cohomology of  $(N,N')$ is (by excision) that of U relative to the cutting two disks
$(N,N')$ is (by excision) that of U relative to the cutting two disks  $D_{\pm}$, i.e., that of
$D_{\pm}$, i.e., that of  $(D \times [-1,1], D \times \{\pm 1\})$. This cohomology is zero in degree ≠ 1, and in degree 1 it is
$(D \times [-1,1], D \times \{\pm 1\})$. This cohomology is zero in degree ≠ 1, and in degree 1 it is  $\mathbb{Z}_2$, generated by the class
$\mathbb{Z}_2$, generated by the class  $\hat{w}_D \in H^1(N,N')$ which counts intersections with the disk D. We then have a commutative diagram
$\hat{w}_D \in H^1(N,N')$ which counts intersections with the disk D. We then have a commutative diagram
where the row comes from the long exact sequence of the pair  $(N,N')$ and the unlabeled arrows are induced by the inclusions. Since α is surjective, the commutativity of the triangle involving
$(N,N')$ and the unlabeled arrows are induced by the inclusions. Since α is surjective, the commutativity of the triangle involving  $H^1(K)$ shows that the kernel of
$H^1(K)$ shows that the kernel of  $H^1(N') \longrightarrow H^1(K)$ is the image under α of the kernel of
$H^1(N') \longrightarrow H^1(K)$ is the image under α of the kernel of  $H^1(N) \longrightarrow H^1(K)$. Notice that
$H^1(N) \longrightarrow H^1(K)$. Notice that  $\beta(\hat{w}_{D}) = w_D$ because both cohomology classes count intersections with D, and since wD is non-zero by assumption, it follows that
$\beta(\hat{w}_{D}) = w_D$ because both cohomology classes count intersections with D, and since wD is non-zero by assumption, it follows that
 \begin{equation*}\dim \ker (H^1(N^{\prime}) \longrightarrow H^1(K)) = \dim \ker (H^1(N) \longrightarrow H^1(K)) -1.\end{equation*}
\begin{equation*}\dim \ker (H^1(N^{\prime}) \longrightarrow H^1(K)) = \dim \ker (H^1(N) \longrightarrow H^1(K)) -1.\end{equation*} For later reference observe also that looking at the rest of the exact sequence for the pair  $(N,N')$ and, using that β is injective, we have that the inclusion
$(N,N')$ and, using that β is injective, we have that the inclusion  $N' \subseteq N$ induces isomorphisms in H 2 and H 0.
$N' \subseteq N$ induces isomorphisms in H 2 and H 0.
A slight elaboration on this procedure yields the following:
Proposition 3.2. Assume  $H^2(N,K) = 0$. Then, there exists a finite family of disjoint, properly embedded arcs
$H^2(N,K) = 0$. Then, there exists a finite family of disjoint, properly embedded arcs  $\{\gamma_i\}$ in Ni such that N cut along the disks
$\{\gamma_i\}$ in Ni such that N cut along the disks  $\{D_i\}$ generated by these arcs produces an N ʹ with
$\{D_i\}$ generated by these arcs produces an N ʹ with  $H^1(N') \longrightarrow H^1(K)$ injective.
$H^1(N') \longrightarrow H^1(K)$ injective.
Proof. Assume for the sake of argument that the kernel of  $H^1(N) \longrightarrow H^1(K)$ has dimension 2. Then, there exist two arcs
$H^1(N) \longrightarrow H^1(K)$ has dimension 2. Then, there exist two arcs  $\gamma_1,\gamma_2$ properly embedded in Ni which generate disks
$\gamma_1,\gamma_2$ properly embedded in Ni which generate disks  $D_1, D_2$ such that
$D_1, D_2$ such that  $\{w_{D_1},w_{D_2}\}$ generate that kernel.
$\{w_{D_1},w_{D_2}\}$ generate that kernel.
Case 1. If the γi are disjoint, so are the disks Di, and then a straightforward variation on the procedure described previously shows that cutting N along the  $\{D_i\}$ simultaneously produces an N ʹ with the required property.
$\{D_i\}$ simultaneously produces an N ʹ with the required property.
Case 2. Suppose, then, that the arcs γi are not disjoint. By perturbing them slightly (which does not change the cohomology classes  $w_{D_i}$) we may assume that the arcs intersect transversally at some points in the interior of Ni. For instance, imagine that they intersect at a single point as in figure 5(a). We modify γ 2 by breaking it at the intersection point and adding arcs parallel to γ 1 to connect the two portions of γ 2 to the boundary of Ni obtaining two properly embedded arcs
$w_{D_i}$) we may assume that the arcs intersect transversally at some points in the interior of Ni. For instance, imagine that they intersect at a single point as in figure 5(a). We modify γ 2 by breaking it at the intersection point and adding arcs parallel to γ 1 to connect the two portions of γ 2 to the boundary of Ni obtaining two properly embedded arcs  $\gamma_2'$ and
$\gamma_2'$ and  $\gamma_2^{\prime\prime}$. See figure 5(b). Clearly, γ 2 is homologous to
$\gamma_2^{\prime\prime}$. See figure 5(b). Clearly, γ 2 is homologous to  $\gamma_2' + \gamma_2^{\prime\prime}$. (If there are more intersection points, we do this for each of them and obtain more summands, but the argument is the same.) The three arcs
$\gamma_2' + \gamma_2^{\prime\prime}$. (If there are more intersection points, we do this for each of them and obtain more summands, but the argument is the same.) The three arcs  $\{\gamma_1,\gamma_2',\gamma_2''\}$ are now disjoint and generate classes
$\{\gamma_1,\gamma_2',\gamma_2''\}$ are now disjoint and generate classes  $w_{D_1}, w_{D_2'}, w_{D_2''}$, which satisfy
$w_{D_1}, w_{D_2'}, w_{D_2''}$, which satisfy  $w_{D_2} = w_{D_2'} + w_{D_2''}$. It follows that either
$w_{D_2} = w_{D_2'} + w_{D_2''}$. It follows that either  $\{w_{D_1},w_{D_2'}\}$ or
$\{w_{D_1},w_{D_2'}\}$ or  $\{w_{D_1},w_{D_2'}\}$ (or perhaps both) generate the kernel of
$\{w_{D_1},w_{D_2'}\}$ (or perhaps both) generate the kernel of  $H^1(N) \longrightarrow H^1(K)$; since they are generated by disjoint arcs, we fall back onto case 1.
$H^1(N) \longrightarrow H^1(K)$; since they are generated by disjoint arcs, we fall back onto case 1.

Figure 5. Case 2 in the proof of proposition 3.1: removing intersections of arcs  $\gamma_i$.
$\gamma_i$.
We can now prove theorem 1.1 in § 1, which we restate here as follows:
Theorem Let  $N \subseteq \mathbb{R}^3$ be an isolating block with a connected boundary. Assume its maximal invariant subset K has
$N \subseteq \mathbb{R}^3$ be an isolating block with a connected boundary. Assume its maximal invariant subset K has  $H^1(K) = 0$. Then, N is a handlebody, and it has a complete system of cutting disks
$H^1(K) = 0$. Then, N is a handlebody, and it has a complete system of cutting disks  $\{D_i\}$ such that each
$\{D_i\}$ such that each  $\partial D_i$ intersects the system of tangency curves exactly twice, and transversally.
$\partial D_i$ intersects the system of tangency curves exactly twice, and transversally.
Proof. Since  $N \subseteq \mathbb{R}^3$, saying that it has a connected boundary is equivalent to saying that
$N \subseteq \mathbb{R}^3$, saying that it has a connected boundary is equivalent to saying that  $H_2(N) = 0$ (write
$H_2(N) = 0$ (write  $\mathbb{S}^3 = N \cup \overline{\mathbb{S}^3 \setminus N}$ and look at the Mayer–Vietoris sequence of this decomposition) and in turn
$\mathbb{S}^3 = N \cup \overline{\mathbb{S}^3 \setminus N}$ and look at the Mayer–Vietoris sequence of this decomposition) and in turn  $H^2(N) = 0$ by the universal coefficient theorem. The long exact sequence in Čech cohomology for the pair (N, K) and the assumption
$H^2(N) = 0$ by the universal coefficient theorem. The long exact sequence in Čech cohomology for the pair (N, K) and the assumption  $H^1(K) = 0$ then imply
$H^1(K) = 0$ then imply  $H^2(N,K) = 0$. Proposition 3.2 yields a system of cutting disks
$H^2(N,K) = 0$. Proposition 3.2 yields a system of cutting disks  $\{D_i\}$ such that N cut along these
$\{D_i\}$ such that N cut along these  $\{D_i\}$ produces an N ʹ with
$\{D_i\}$ produces an N ʹ with  $H^1(N') \longrightarrow H^1(K)$ injective. Since
$H^1(N') \longrightarrow H^1(K)$ injective. Since  $H^1(K) = 0$ by assumption, this forces
$H^1(K) = 0$ by assumption, this forces  $H^1(N') = 0$. We observed just before proposition 3.2 that
$H^1(N') = 0$. We observed just before proposition 3.2 that  $N' \subseteq N$ induces isomorphisms in H 2 and H 0, so, in particular, we still have
$N' \subseteq N$ induces isomorphisms in H 2 and H 0, so, in particular, we still have  $H^2(N') = H^2(N) = 0$ and
$H^2(N') = H^2(N) = 0$ and  $H^0(N') = H^0(N) = \mathbb{Z}_2$. It follows easily from Lefschetz duality that
$H^0(N') = H^0(N) = \mathbb{Z}_2$. It follows easily from Lefschetz duality that  $\partial N'$ has the homology of a 2-sphere, and so it is a 2-sphere. Since
$\partial N'$ has the homology of a 2-sphere, and so it is a 2-sphere. Since  $\partial N'$ is polyhedral, it follows from the polyhedral Schönflies theorem of Alexander ([Reference Moise10, Theorem 12, p. 122]) that N ʹ is a 3-ball. Thus, N is a handlebody and
$\partial N'$ is polyhedral, it follows from the polyhedral Schönflies theorem of Alexander ([Reference Moise10, Theorem 12, p. 122]) that N ʹ is a 3-ball. Thus, N is a handlebody and  $\{D_i\}$ is a complete system of cutting disks for N satisfying the required conditions.
$\{D_i\}$ is a complete system of cutting disks for N satisfying the required conditions.
3.3.
We now prove lemma 3.1. This requires some preliminary work. We denote by  $N^+$ the set of points in N whose forward semitrajectory is entirely contained in N. This is compact, contains K, and intersects
$N^+$ the set of points in N whose forward semitrajectory is entirely contained in N. This is compact, contains K, and intersects  $\partial N$ along
$\partial N$ along  $n^+$. Also, we denote by
$n^+$. Also, we denote by  $t^i(p)$ the analogue of to in backward time: the infimum of all
$t^i(p)$ the analogue of to in backward time: the infimum of all  $t \leq 0$ such that
$t \leq 0$ such that  $p \cdot [t,0] \subseteq N$.
$p \cdot [t,0] \subseteq N$.
(i) All the inclusions
 \begin{equation*}(N,K) \subseteq (N,N^+) \supseteq (N^i \cup N^+, N^+) \supseteq (N^i,n^+)\end{equation*}
\begin{equation*}(N,K) \subseteq (N,N^+) \supseteq (N^i \cup N^+, N^+) \supseteq (N^i,n^+)\end{equation*} induce isomorphisms in Čech cohomology. The last one is just the strong excision property of Čech cohomology, while the other two make use of the flow to construct appropriate ‘infinite time’ deformation retractions. For example, consider the map  $H : (N,N^+) \times [0,+\infty) \longrightarrow (N,N^+)$ given by
$H : (N,N^+) \times [0,+\infty) \longrightarrow (N,N^+)$ given by  $(p,t) \longmapsto p \cdot \max \{-t,t^i(p)\}$. Fixing p and allowing t to go from 0 to
$(p,t) \longmapsto p \cdot \max \{-t,t^i(p)\}$. Fixing p and allowing t to go from 0 to  $+\infty$, the point
$+\infty$, the point  $H(p,t)$ just follows the trajectory of p backwards until it first hits Ni (if it ever does) and remains stationary thereafter. The sets
$H(p,t)$ just follows the trajectory of p backwards until it first hits Ni (if it ever does) and remains stationary thereafter. The sets  $H(N \times [k,+\infty))$ for
$H(N \times [k,+\infty))$ for  $k = 0,1,2,\ldots$ form a nested sequence of compacta, and the inclusion of each of them in the previous one is a homotopy equivalence, with
$k = 0,1,2,\ldots$ form a nested sequence of compacta, and the inclusion of each of them in the previous one is a homotopy equivalence, with  $H|_{N \times [k,k+1]}$ providing a homotopy inverse. The first member of the sequence (k = 0) is
$H|_{N \times [k,k+1]}$ providing a homotopy inverse. The first member of the sequence (k = 0) is  $(N,N^+)$, and the limit of the sequence (the intersection of the whole sequence) is
$(N,N^+)$, and the limit of the sequence (the intersection of the whole sequence) is  $(N^i \cup N^+,N^+)$. Thus, the inclusion
$(N^i \cup N^+,N^+)$. Thus, the inclusion  $(N^i \cup N^+, N^+) \subseteq (N,N^+)$ induces isomorphisms in Čech cohomology by its continuity property ([Reference Eilenberg and Steenrod4, theorem 3.1, p. 261]). A similar argument applies to the inclusion
$(N^i \cup N^+, N^+) \subseteq (N,N^+)$ induces isomorphisms in Čech cohomology by its continuity property ([Reference Eilenberg and Steenrod4, theorem 3.1, p. 261]). A similar argument applies to the inclusion  $K \subseteq N^+$, and then, the five lemma ensures that
$K \subseteq N^+$, and then, the five lemma ensures that  $(N,K) \subseteq (N,N^+)$ also induces isomorphisms in Čech cohomology.
$(N,K) \subseteq (N,N^+)$ also induces isomorphisms in Čech cohomology.
(ii) Let  $P \subseteq N^i$ be a compact 2-manifold, which is a neighbourhood of
$P \subseteq N^i$ be a compact 2-manifold, which is a neighbourhood of  $n^+$. Then
$n^+$. Then  $H^k(N^i,P) \cong H^k(\overline{N^i \setminus P},\partial P) \cong H_{2-k}(\overline{N^i \setminus P},\partial N^i)$, where we have used excision and Lefschetz duality (in the manifold
$H^k(N^i,P) \cong H^k(\overline{N^i \setminus P},\partial P) \cong H_{2-k}(\overline{N^i \setminus P},\partial N^i)$, where we have used excision and Lefschetz duality (in the manifold  $\overline{N^i \setminus P}$), respectively. The geometric interpretation of this isomorphism (in dimension k = 1, for example) is as follows. Let
$\overline{N^i \setminus P}$), respectively. The geometric interpretation of this isomorphism (in dimension k = 1, for example) is as follows. Let  $z_{\gamma} \in H^1(N^i,P)$ correspond to
$z_{\gamma} \in H^1(N^i,P)$ correspond to  $\gamma \in H_1(\overline{N^i \setminus P},\partial N^i)$. Then zγ acts on any
$\gamma \in H_1(\overline{N^i \setminus P},\partial N^i)$. Then zγ acts on any  $\alpha \in H_1(N^i,P)$ by returning its intersection number with γ (modulo 2). That is, if c and a are transverse polygonal 1-chains representing γ and α, then
$\alpha \in H_1(N^i,P)$ by returning its intersection number with γ (modulo 2). That is, if c and a are transverse polygonal 1-chains representing γ and α, then  $z_{\gamma}(\alpha)$ is the number of intersection points of c and a modulo 2. This description characterizes zγ completely (by the universal coefficients theorem). Passing to the limit as P gets smaller and using the continuity property of Čech cohomology and the compact supports property of homology yield an isomorphism
$z_{\gamma}(\alpha)$ is the number of intersection points of c and a modulo 2. This description characterizes zγ completely (by the universal coefficients theorem). Passing to the limit as P gets smaller and using the continuity property of Čech cohomology and the compact supports property of homology yield an isomorphism  $H^k(N^i,n^+) \cong H_{2-k}(N^i - n^+,\partial N^i)$. The geometric interpretation of this isomorphism is essentially the same as above.
$H^k(N^i,n^+) \cong H_{2-k}(N^i - n^+,\partial N^i)$. The geometric interpretation of this isomorphism is essentially the same as above.
Lemma 3.3. Assume  $H^2(N,K) = 0$. Let γ run over all arcs properly embedded in
$H^2(N,K) = 0$. Let γ run over all arcs properly embedded in  $N^i - n^+$. Then, the zγ generate
$N^i - n^+$. Then, the zγ generate  $H^1(N^i,n^+)$.
$H^1(N^i,n^+)$.
Proof. Consider the homology group  $H_1(N^i - n^+,\partial N^i)$. Assuming everything to be triangulated, any homology class has a representative c, which is a (finite) sum of simplices whose algebraic boundary
$H_1(N^i - n^+,\partial N^i)$. Assuming everything to be triangulated, any homology class has a representative c, which is a (finite) sum of simplices whose algebraic boundary  $\partial c$ lies in
$\partial c$ lies in  $\partial N^i$. Since we are taking coefficients in
$\partial N^i$. Since we are taking coefficients in  $\mathbb{Z}_2$, the chain c can be identified with its underlying set, and it is then very easy to prove (using
$\mathbb{Z}_2$, the chain c can be identified with its underlying set, and it is then very easy to prove (using  $\partial c = 0$) that the simplices in c can be grouped into a structure
$\partial c = 0$) that the simplices in c can be grouped into a structure  $\sum c_i + \sum a_j$, where each ci is a simple closed curve and each aj is an arc whose end points lie in
$\sum c_i + \sum a_j$, where each ci is a simple closed curve and each aj is an arc whose end points lie in  $\partial N^i$.
$\partial N^i$.
Since  $H^2(N,K) = 0$, from (ii) above, we have
$H^2(N,K) = 0$, from (ii) above, we have  $H_0(N^i-n^+,\partial N^i) = H^2(N,K) = 0$ and so each component of
$H_0(N^i-n^+,\partial N^i) = H^2(N,K) = 0$ and so each component of  $N^i - n^+$ intersects
$N^i - n^+$ intersects  $\partial N^i$. Then each summand ci is homologous to a properly embedded arc; it suffices to join ci to
$\partial N^i$. Then each summand ci is homologous to a properly embedded arc; it suffices to join ci to  $\partial N^i$ with a thin ribbon intersecting ci and Ni along its short sides and add the boundary of the ribbon to ci (perhaps one needs to push ci slightly into the interior of Ni first). Thus, we have shown that
$\partial N^i$ with a thin ribbon intersecting ci and Ni along its short sides and add the boundary of the ribbon to ci (perhaps one needs to push ci slightly into the interior of Ni first). Thus, we have shown that  $H_1(N^i - n^+,\partial N^i)$ is generated by (the homology classes defined by) properly embedded arcs γ, and so by (ii) above,
$H_1(N^i - n^+,\partial N^i)$ is generated by (the homology classes defined by) properly embedded arcs γ, and so by (ii) above,  $H^1(N^i,n^+)$ is generated by the zγ.
$H^1(N^i,n^+)$ is generated by the zγ.
Recall from (i) that the inclusion induced map  $j^* : H^1(N,N^+) \longrightarrow (N^i,n^+)$ is an isomorphism. It follows from the previous lemma that
$j^* : H^1(N,N^+) \longrightarrow (N^i,n^+)$ is an isomorphism. It follows from the previous lemma that  $\{(j^*)^{-1}(z_{\gamma})\}$ is a generating system for
$\{(j^*)^{-1}(z_{\gamma})\}$ is a generating system for  $H^1(N,N^+)$. These cohomology classes have a simple geometric interpretation. We discussed in § 3.1 how every arc γ gives rise via the flow to a disk D in N. There is a cohomology class zD that counts intersections (modulo 2) with the disk D; evidently the restriction of this to Ni counts intersections with
$H^1(N,N^+)$. These cohomology classes have a simple geometric interpretation. We discussed in § 3.1 how every arc γ gives rise via the flow to a disk D in N. There is a cohomology class zD that counts intersections (modulo 2) with the disk D; evidently the restriction of this to Ni counts intersections with  $D \cap N^i = \gamma$; in other words, it is zγ. Thus,
$D \cap N^i = \gamma$; in other words, it is zγ. Thus,  $(j^*)^{-1}(z_{\gamma}) = z_D$. Finally, since the inclusion
$(j^*)^{-1}(z_{\gamma}) = z_D$. Finally, since the inclusion  $(N,K) \subseteq (N,N^+)$ also induces isomorphisms in Čech cohomology, we have
$(N,K) \subseteq (N,N^+)$ also induces isomorphisms in Čech cohomology, we have
Lemma 3.4. Assume  $H^2(N,K) = 0$. Let γ run over all arcs properly embedded in
$H^2(N,K) = 0$. Let γ run over all arcs properly embedded in  $N^i - n^+$ and let D run over all the disks generated from these arcs by the flow. Then,
$N^i - n^+$ and let D run over all the disks generated from these arcs by the flow. Then,  $\{z_D\}$ generates
$\{z_D\}$ generates  $H^1(N,K)$.
$H^1(N,K)$.
Denote by wD the image of zD under the inclusion induced homomorphism  $H^1(N,K) \longrightarrow H^1(N)$. Again, wD just counts intersections with D. By the previous lemma and the exactness of the cohomology sequence for the pair (N, K), the set
$H^1(N,K) \longrightarrow H^1(N)$. Again, wD just counts intersections with D. By the previous lemma and the exactness of the cohomology sequence for the pair (N, K), the set  $\{w_D\}$ generates the kernel of the inclusion induced homomorphism
$\{w_D\}$ generates the kernel of the inclusion induced homomorphism  $H^1(N) \longrightarrow H^1(K)$. This proves lemma 3.1.
$H^1(N) \longrightarrow H^1(K)$. This proves lemma 3.1.
4. Proof of theorem 1.5
Very roughly, the proof of theorem 1.5 from § 1 can be described as follows. First one shows that for any coloured 3-ball B, there is a vectorfield on (a small neighbourhood of) the ball which generates a flow that realizes B as an isolating block whose maximal invariant subset is a single rest point. To prove theorem 1.5 one starts with the coloured handlebody N, cuts it along the disks  $\{D_i\}$ to obtain a 3-ball
$\{D_i\}$ to obtain a 3-ball  $B = N \setminus \bigcup D_i \times (-1,1)$, finds a vectorfield as just described on B, and then extends it to the 1-handles
$B = N \setminus \bigcup D_i \times (-1,1)$, finds a vectorfield as just described on B, and then extends it to the 1-handles  $D_i \times [-1,1]$ in such a way that no new invariant structure is introduced.
$D_i \times [-1,1]$ in such a way that no new invariant structure is introduced.
The idea is simple enough and the constructions are not difficult to visualize, but the formalization is slightly cumbersome. We will discuss a simpler case first (proposition 4.1) to introduce the basic elements of the construction and then elaborate on it in proposition 4.2. In these two results N will be any tame coloured manifold in  $\mathbb{R}^3$, not necessarily a handlebody, since the proof is the same.
$\mathbb{R}^3$, not necessarily a handlebody, since the proof is the same.
We would like to use the convenient language of vectorfields to define the flow. In order to do this we use the following trick. Recall that any 3-manifold has a differentiable structure. We are given the coloured manifold N as a subset of  $\mathbb{R}^3$, but by regarding it as an abstract 3-manifold we may assume that it is differentiable. We will enlarge it by attaching a collar
$\mathbb{R}^3$, but by regarding it as an abstract 3-manifold we may assume that it is differentiable. We will enlarge it by attaching a collar  $\partial N \times [0,1]$ onto its boundary to obtain
$\partial N \times [0,1]$ onto its boundary to obtain  $M = N \cup \partial N \times [0,1]$ and define a flow φ on M which realizes N as an isolating block. The advantage is that on M we can use the language of differential topology to define the flow relatively easily. Returning from this abstract flow to
$M = N \cup \partial N \times [0,1]$ and define a flow φ on M which realizes N as an isolating block. The advantage is that on M we can use the language of differential topology to define the flow relatively easily. Returning from this abstract flow to  $\mathbb{R}^3$ is simple. Denote by N emb (for ‘embedded’) the 3-manifold N thought of as a subset of
$\mathbb{R}^3$ is simple. Denote by N emb (for ‘embedded’) the 3-manifold N thought of as a subset of  $\mathbb{R}^3$. It is here that the assumption that N emb be tame will come into play: it ensures that N emb has a collar in
$\mathbb{R}^3$. It is here that the assumption that N emb be tame will come into play: it ensures that N emb has a collar in  $\mathbb{R}^3$, and so it can be slightly enlarged to
$\mathbb{R}^3$, and so it can be slightly enlarged to  $M_{\rm emb} = N_{\rm emb} \cup \partial N_{\rm emb} \times [0,1]$. The (identity) homeomorphism
$M_{\rm emb} = N_{\rm emb} \cup \partial N_{\rm emb} \times [0,1]$. The (identity) homeomorphism  $N \longrightarrow N_{\rm emb}$ can be trivially extended to a homeomorphism
$N \longrightarrow N_{\rm emb}$ can be trivially extended to a homeomorphism  $M \longrightarrow M_{\rm emb}$, and then the flow φ defined on M can be copied to a flow defined on M emb which realizes N emb as an isolating block. The flow can then be extended to all of
$M \longrightarrow M_{\rm emb}$, and then the flow φ defined on M can be copied to a flow defined on M emb which realizes N emb as an isolating block. The flow can then be extended to all of  $\mathbb{R}^3$ in whatever way.
$\mathbb{R}^3$ in whatever way.
4.1.
Let N be a compact 3-manifold. A spine of N is a compact set  $K \subseteq {\rm Int}\ N$ such that
$K \subseteq {\rm Int}\ N$ such that  $N \setminus K$ is homeomorphic to
$N \setminus K$ is homeomorphic to  $\partial N \times (-1,0]$, where
$\partial N \times (-1,0]$, where  $\partial N \ni x \longmapsto (x,0)$ under the homeomorphism. For example, a point in the interior of a 3-ball is a spine.
$\partial N \ni x \longmapsto (x,0)$ under the homeomorphism. For example, a point in the interior of a 3-ball is a spine.
Proposition 4.1. Let  $(N,P,Q)$ be a tame coloured manifold in
$(N,P,Q)$ be a tame coloured manifold in  $\mathbb{R}^3$ and K a spine for N. There exists a flow φ in
$\mathbb{R}^3$ and K a spine for N. There exists a flow φ in  $\mathbb{R}^3$ which realizes N as an isolating block whose maximal invariant subset is K.
$\mathbb{R}^3$ which realizes N as an isolating block whose maximal invariant subset is K.
Proof. Figure 6(a) shows the annulus  $A := \{u \in \mathbb{R}^2 : 1 \leq \|u\| \leq 3\}$ coloured in a certain way. On A we consider the tangent vectorfield
$A := \{u \in \mathbb{R}^2 : 1 \leq \|u\| \leq 3\}$ coloured in a certain way. On A we consider the tangent vectorfield  $u \longmapsto (\|u\|-1)(3-\|u\|)u$. The flow it generates has both boundary components consisting of fixed points and otherwise its trajectories evolve radially from the white component of the boundary towards the grey one.
$u \longmapsto (\|u\|-1)(3-\|u\|)u$. The flow it generates has both boundary components consisting of fixed points and otherwise its trajectories evolve radially from the white component of the boundary towards the grey one.

Figure 6. The coloured annulus A with a radial flow.
 $\boxed{\textrm{Step}~1}$ Consider
$\boxed{\textrm{Step}~1}$ Consider  $\partial N$ as a surface in the abstract. We may assume that it is differentiable and so are its subsets P and Q. We define a tangent vectorfield W 0 on
$\partial N$ as a surface in the abstract. We may assume that it is differentiable and so are its subsets P and Q. We define a tangent vectorfield W 0 on  $\partial N$. For each tangency curve τ let Aτ be a thin annulus along τ. Each Aτ is diffeomorphic to the model A of figure 6(a) via a colour preserving diffeomorphism. We define W 0 on each annulus Aτ by using any such diffeomorphism to copy the radial vectorfield on A. We will also use the expressions ‘radial segment’ or ‘radial direction’ on Aτ with the obvious meaning.
$\partial N$. For each tangency curve τ let Aτ be a thin annulus along τ. Each Aτ is diffeomorphic to the model A of figure 6(a) via a colour preserving diffeomorphism. We define W 0 on each annulus Aτ by using any such diffeomorphism to copy the radial vectorfield on A. We will also use the expressions ‘radial segment’ or ‘radial direction’ on Aτ with the obvious meaning.
Deleting the interiors of the annuli Aτ from P and Q we obtain slightly shrinked copies of P and Q that we shall denote by sP and sQ. Define W 0 to be zero on sP and sQ. The flow on  $\partial N$ generated by W 0 has every point in sP and sQ stationary and flows radially across the annuli Aτ, from sP towards sQ.
$\partial N$ generated by W 0 has every point in sP and sQ stationary and flows radially across the annuli Aτ, from sP towards sQ.
Finally, define a smooth map  $\theta : \partial N \longrightarrow [-1,1]$ such that
$\theta : \partial N \longrightarrow [-1,1]$ such that
(i)
$\theta|_{sP} \equiv +1$, $\theta|_{sQ} \equiv -1$ and $\theta|_{\tau} \equiv 0$ for each t-curve τ;(ii) θ is strictly decreasing along each of the radial segments that fibre the annuli Aτ.



For example,  $\theta|_{A_{\tau}}$ could be (a suitably rescaled version of) the radius function of the annulus Aτ.
$\theta|_{A_{\tau}}$ could be (a suitably rescaled version of) the radius function of the annulus Aτ.
 $\boxed{\textrm{Step}~2}$ Consider the abstract Cartesian product
$\boxed{\textrm{Step}~2}$ Consider the abstract Cartesian product  $\partial N \times [-1,1]$. We denote its points by (x, r) and identify its tangent space at a point (x, r) with
$\partial N \times [-1,1]$. We denote its points by (x, r) and identify its tangent space at a point (x, r) with  $T_x (\partial N) \oplus \mathbb{R}$. Thus, a tangent vector
$T_x (\partial N) \oplus \mathbb{R}$. Thus, a tangent vector  $V = (W,U)$ at a point (x, r) consists of two components: a vector W tangent to
$V = (W,U)$ at a point (x, r) consists of two components: a vector W tangent to  $\partial N$ at x and a real number U.
$\partial N$ at x and a real number U.
Define a tangent vectorfield  $V = (W,U)$ on
$V = (W,U)$ on  $\partial N \times [-1,1]$ by
$\partial N \times [-1,1]$ by
 \begin{equation*}W_{(x,r)} = W_0(x) \ \ \text{and } \ \ U_{(x,r)} = (r^2-1)\, \theta(x).\end{equation*}
\begin{equation*}W_{(x,r)} = W_0(x) \ \ \text{and } \ \ U_{(x,r)} = (r^2-1)\, \theta(x).\end{equation*} For  $r = \pm 1$ we have
$r = \pm 1$ we have  $V = (W_0,0)$ and so V is actually tangent to the boundary
$V = (W_0,0)$ and so V is actually tangent to the boundary  $\partial N \times \{\pm 1\}$ of
$\partial N \times \{\pm 1\}$ of  $\partial N \times [-1,1]$. Thus, we can integrate V to obtain a complete flow ψ on
$\partial N \times [-1,1]$. Thus, we can integrate V to obtain a complete flow ψ on  $\partial N \times [-1,1]$.
$\partial N \times [-1,1]$.
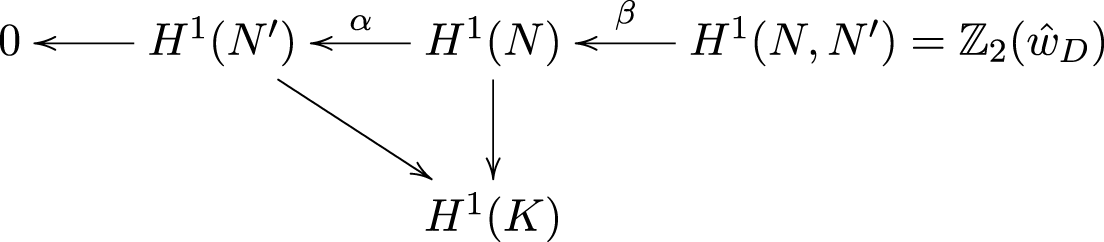
If we take a cross section of  $\partial N \times [-1,1]$ along one of the radial fibres of an annulus Aτ and extending a little into sP and sQ we observe the phase portrait shown in figure 7. The grey half of the picture is
$\partial N \times [-1,1]$ along one of the radial fibres of an annulus Aτ and extending a little into sP and sQ we observe the phase portrait shown in figure 7. The grey half of the picture is  $Q \times [-1,1]$ and the white half is
$Q \times [-1,1]$ and the white half is  $P \times [-1,1]$. Horizontal and vertical movement are controlled by the components W and U of V, respectively.
$P \times [-1,1]$. Horizontal and vertical movement are controlled by the components W and U of V, respectively.
Figure 7. The flow on a cross section of  $\partial N \times [-1,1]$.
$\partial N \times [-1,1]$.
We justify briefly the drawing of the phase portrait. On the top and bottom lines  $r = \pm 1$ we have
$r = \pm 1$ we have  $V = ( W_0,0)$ so ψ behaves there as explained in Step 1. Trajectories in
$V = ( W_0,0)$ so ψ behaves there as explained in Step 1. Trajectories in  $sP \times [-1,1]$ and
$sP \times [-1,1]$ and  $sQ \times [-1,1]$ move vertically because θ = 0 there. Trajectories in
$sQ \times [-1,1]$ move vertically because θ = 0 there. Trajectories in  $({\rm Int}\ A_{\tau}) \times (-1,1)$ have the U-shape suggested by the diagram for the following reason. Let
$({\rm Int}\ A_{\tau}) \times (-1,1)$ have the U-shape suggested by the diagram for the following reason. Let  $t \longmapsto (x(t),r(t))$ be one such trajectory and observe that x(t) is an integral curve (in
$t \longmapsto (x(t),r(t))$ be one such trajectory and observe that x(t) is an integral curve (in  $\partial N$) for W 0 because W only depends on x. Thus, x(t) must travel from the white boundary component of an annulus Aτ towards the other. While it does so,
$\partial N$) for W 0 because W only depends on x. Thus, x(t) must travel from the white boundary component of an annulus Aτ towards the other. While it does so,  $\theta(x(t))$ is positive until x(t) hits τ, where θ vanishes, and becomes negative thereafter. Since
$\theta(x(t))$ is positive until x(t) hits τ, where θ vanishes, and becomes negative thereafter. Since  $\dot{r}(t)$ is proportional to
$\dot{r}(t)$ is proportional to  $\theta(x(t))$ through a negative factor, it follows that r(t) strictly decreases, reaching a minimum as x(t) crosses τ, and then strictly increases again. This justifies the U-shape of the trajectory. Notice also that for
$\theta(x(t))$ through a negative factor, it follows that r(t) strictly decreases, reaching a minimum as x(t) crosses τ, and then strictly increases again. This justifies the U-shape of the trajectory. Notice also that for  $t \rightarrow \pm \infty$ we must have
$t \rightarrow \pm \infty$ we must have  $r(t) \rightarrow 1$.
$r(t) \rightarrow 1$.
Consider  $\partial N \times (-1,0] \subseteq \partial N \times [-1,1]$. It follows from the previous paragraph that its maximal invariant subset is empty. Notice that along its boundary
$\partial N \times (-1,0] \subseteq \partial N \times [-1,1]$. It follows from the previous paragraph that its maximal invariant subset is empty. Notice that along its boundary  $\partial N \times \{0\}$ the flow ψ behaves in the manner required for an isolating block: at points
$\partial N \times \{0\}$ the flow ψ behaves in the manner required for an isolating block: at points  $(x,0)$ with
$(x,0)$ with  $x \in {\rm Int}\ P$ we have
$x \in {\rm Int}\ P$ we have  $U_{(x,0)} = -\theta(x) \lt 0$ so that ψ crosses
$U_{(x,0)} = -\theta(x) \lt 0$ so that ψ crosses  $\partial N \times \{0\}$ transversally into
$\partial N \times \{0\}$ transversally into  $\partial N \times (-1,0]$, with the opposite happening when
$\partial N \times (-1,0]$, with the opposite happening when  $p \in {\rm Int}\ Q$. For points x in
$p \in {\rm Int}\ Q$. For points x in  $\bigcup \tau \times \{0\}$ the flow ψ is externally tangent to
$\bigcup \tau \times \{0\}$ the flow ψ is externally tangent to  $\partial N \times \{0\}$.
$\partial N \times \{0\}$.
 $\boxed{\textrm{Step}~3}$ Still considering N as an abstract 3-manifold, enlarge it to a manifold M by attaching a collar
$\boxed{\textrm{Step}~3}$ Still considering N as an abstract 3-manifold, enlarge it to a manifold M by attaching a collar  $\partial N \times [0,1]$ to its boundary via the map
$\partial N \times [0,1]$ to its boundary via the map  $(x,0) \longmapsto x$. Since K is a spine of N, there exists a homeomorphism
$(x,0) \longmapsto x$. Since K is a spine of N, there exists a homeomorphism  $\partial N \times (-1,0] \cong N \setminus K$; this can be extended to the collar in an obvious manner yielding a homeomorphism
$\partial N \times (-1,0] \cong N \setminus K$; this can be extended to the collar in an obvious manner yielding a homeomorphism  $\partial N \times (-1,1] \cong M \setminus K$. Actually, since any 3-manifold has a unique differentiable structure, there is a diffeomorphism
$\partial N \times (-1,1] \cong M \setminus K$. Actually, since any 3-manifold has a unique differentiable structure, there is a diffeomorphism  $\partial N \times (-1,1] \cong M \setminus K$. We may thus identify these two manifolds and think of V as a vectorfield in
$\partial N \times (-1,1] \cong M \setminus K$. We may thus identify these two manifolds and think of V as a vectorfield in  $M \setminus K$. Define a vectorfield
$M \setminus K$. Define a vectorfield  $\tilde{V}$ on all of M by picking a continuous function
$\tilde{V}$ on all of M by picking a continuous function  $\mu : M \longrightarrow [0,1]$ such that
$\mu : M \longrightarrow [0,1]$ such that  $K = \mu^{-1}(0)$ and setting
$K = \mu^{-1}(0)$ and setting  $\tilde{V} = 0$ over K and
$\tilde{V} = 0$ over K and  $\tilde{V} = (\mu/(\mu + \|V\|)) V$ outside K. This vectorfield generates a flow φ on M which is stationary on K and has the same phase portrait of figure 7 on
$\tilde{V} = (\mu/(\mu + \|V\|)) V$ outside K. This vectorfield generates a flow φ on M which is stationary on K and has the same phase portrait of figure 7 on  $M \setminus K$. Thus N is an isolating block in the phase space M, with entry and exit sets P and Q respectively, and maximal invariant subset K. We finally return to the embedded
$M \setminus K$. Thus N is an isolating block in the phase space M, with entry and exit sets P and Q respectively, and maximal invariant subset K. We finally return to the embedded  $N \subseteq \mathbb{R}^3$ as explained at the beginning of this section.
$N \subseteq \mathbb{R}^3$ as explained at the beginning of this section.
4.2.
Suppose  $(N,P,Q)$ is a (tame) coloured manifold in
$(N,P,Q)$ is a (tame) coloured manifold in  $\mathbb{R}^3$ and
$\mathbb{R}^3$ and  $\{D_i\}$ is a system of cutting disks for N. Let N ʹ be the result of cutting N along the
$\{D_i\}$ is a system of cutting disks for N. Let N ʹ be the result of cutting N along the  $\{D_i\}$ and let
$\{D_i\}$ and let  $K' \subseteq {\rm Int}\ N'$ be a spine of N ʹ.
$K' \subseteq {\rm Int}\ N'$ be a spine of N ʹ.
Proposition 4.2. There exists a flow φ in  $\mathbb{R}^3$ which realizes N as an isolating block whose maximal invariant subset is K ʹ.
$\mathbb{R}^3$ which realizes N as an isolating block whose maximal invariant subset is K ʹ.
Notice the difference with proposition 4.1: here the maximal invariant subset of N is not a spine K of N itself, but a spine K ʹ of the simpler manifold N ʹ.
Proof of proposition 4.2
For notational simplicity we prove the proposition when there is just one cutting disk D. The proof is a modification of the argument of proposition 4.1.
Let N ʹ be the result of cutting N along the disk D. As described previously,  $\partial N'$ is coloured almost completely save for the two lined cutting disks
$\partial N'$ is coloured almost completely save for the two lined cutting disks  $D_{\pm}$. For the purpose of comparison with proposition 4.1 extend the colouring of
$D_{\pm}$. For the purpose of comparison with proposition 4.1 extend the colouring of  $\partial N'$ to the disks
$\partial N'$ to the disks  $D_{\pm}$ in the obvious manner shown in figure 8, painting one half of each disk black and the other white. Now N ʹ is a coloured manifold whose t-curves we denote generically by
$D_{\pm}$ in the obvious manner shown in figure 8, painting one half of each disk black and the other white. Now N ʹ is a coloured manifold whose t-curves we denote generically by  $\tau'$. Notice that each of the disjoint disks
$\tau'$. Notice that each of the disjoint disks  $D_{\pm}$ intersects
$D_{\pm}$ intersects  $\bigcup \tau'$ along a diameter. For later reference we label by
$\bigcup \tau'$ along a diameter. For later reference we label by  $t_-$ and
$t_-$ and  $t_+$ the points shown in figure 8. The point
$t_+$ the points shown in figure 8. The point  $t_-$ is any one of the two points in
$t_-$ is any one of the two points in  $\partial D_-$ where the colouring changes; once this is chosen,
$\partial D_-$ where the colouring changes; once this is chosen,  $t_+$ is the point in
$t_+$ is the point in  $\partial D_+$ which sits ‘in front’ of
$\partial D_+$ which sits ‘in front’ of  $t_-$, i.e., which is joined to
$t_-$, i.e., which is joined to  $t_-$ by a portion of a t-curve in
$t_-$ by a portion of a t-curve in  $D \times [-1,1]$.
$D \times [-1,1]$.

Figure 8. Two reference points in the cutting disks of N'.
 $\boxed{\textrm{Step}~1}$ We first define a tangent vectorfield W 0 on
$\boxed{\textrm{Step}~1}$ We first define a tangent vectorfield W 0 on  $\partial N'$. Again, for each tangency curve
$\partial N'$. Again, for each tangency curve  $\tau'$ of
$\tau'$ of  $\partial N'$ we let
$\partial N'$ we let  $A_{\tau'}$ be a thin annulus along
$A_{\tau'}$ be a thin annulus along  $\tau'$. We use the same construction as in Step 1 of proposition 4.1 with the following modification. In the boundary of N ʹ, somewhere along
$\tau'$. We use the same construction as in Step 1 of proposition 4.1 with the following modification. In the boundary of N ʹ, somewhere along  $\bigcup \tau'$, there are the two cutting disks
$\bigcup \tau'$, there are the two cutting disks  $D_{\pm}$. We choose the annuli
$D_{\pm}$. We choose the annuli  $A_{\tau'}$ in such a way that the disks
$A_{\tau'}$ in such a way that the disks  $D_{\pm}$ are contained in these annuli. Also, when choosing the diffeomorphisms
$D_{\pm}$ are contained in these annuli. Also, when choosing the diffeomorphisms  $A_{\tau'} \cong A$ to copy the radial vectorfield in A to a vectorfield W 0 in the annuli
$A_{\tau'} \cong A$ to copy the radial vectorfield in A to a vectorfield W 0 in the annuli  $A_{\tau'}$ we take the following precaution. Suppose that (say)
$A_{\tau'}$ we take the following precaution. Suppose that (say)  $D_+$ is contained in
$D_+$ is contained in  $A_{\tau'}$. We then choose the diffeomorphism
$A_{\tau'}$. We then choose the diffeomorphism  $A_{\tau'} \cong A$ in such a way that
$A_{\tau'} \cong A$ in such a way that  $D_+ \subseteq A_{\tau'}$ corresponds to the lined disk
$D_+ \subseteq A_{\tau'}$ corresponds to the lined disk  $D \subseteq A$ in figure 9(a). We define
$D \subseteq A$ in figure 9(a). We define  $D'_+$ to be the preimage of D ʹ under the diffeomorphism
$D'_+$ to be the preimage of D ʹ under the diffeomorphism  $A_{\tau'} \cong A$. Finally, we extend W 0 by zero outside the annuli
$A_{\tau'} \cong A$. Finally, we extend W 0 by zero outside the annuli  $A_{\tau'}$.
$A_{\tau'}$.
For later reference we observe the following. Consider the phase portrait of figure 9(b) and denote by  $\mathbb{D}_1 \subseteq \mathbb{D}_2$ the two concentric disks depicted there. Every point in
$\mathbb{D}_1 \subseteq \mathbb{D}_2$ the two concentric disks depicted there. Every point in  $\partial \mathbb{D}_2$ is a rest point, and otherwise trajectories flow in a parallel fashion. The point
$\partial \mathbb{D}_2$ is a rest point, and otherwise trajectories flow in a parallel fashion. The point  $t \in \partial \mathbb{D}_1$ is one of the two points where a trajectory is tangent to
$t \in \partial \mathbb{D}_1$ is one of the two points where a trajectory is tangent to  $\mathbb{D}_1$. Now imagine one modifies the radial flow in A in panel (a) of the figure by stopping it outside the interior of D ʹ. Every point in the boundary of D ʹ becomes a rest point, and trajectories inside D ʹ still flow radially as in the drawing. This modified flow on D ʹ is conjugate to the model shown in figure 9(b) via a colour preserving homeomorphism
$\mathbb{D}_1$. Now imagine one modifies the radial flow in A in panel (a) of the figure by stopping it outside the interior of D ʹ. Every point in the boundary of D ʹ becomes a rest point, and trajectories inside D ʹ still flow radially as in the drawing. This modified flow on D ʹ is conjugate to the model shown in figure 9(b) via a colour preserving homeomorphism  $(D',D) \cong (\mathbb{D}_2,\mathbb{D}_1)$. In particular, the two points in
$(D',D) \cong (\mathbb{D}_2,\mathbb{D}_1)$. In particular, the two points in  $\partial D$ where the modified radial flow in D ʹ is tangent to D must go to the corresponding tangency points in
$\partial D$ where the modified radial flow in D ʹ is tangent to D must go to the corresponding tangency points in  $\partial \mathbb{D}_1$, and one can choose which one goes to t.
$\partial \mathbb{D}_1$, and one can choose which one goes to t.

Figure 9. The position of the cutting disks within the annulus A.
The map θ is defined exactly as before.
 $\boxed{\textrm{Step}~2}$ Now we define a tangent vectorfield
$\boxed{\textrm{Step}~2}$ Now we define a tangent vectorfield  $V = (W,U)$ on
$V = (W,U)$ on  $\partial N' \times [-1,1]$ using W 0 in a manner similar to the previous proposition, but with some modifications so that we can later on extend the dynamics to all of N. Let
$\partial N' \times [-1,1]$ using W 0 in a manner similar to the previous proposition, but with some modifications so that we can later on extend the dynamics to all of N. Let  $\alpha : \partial N' \longrightarrow [0,1]$ be a smooth map which is strictly positive exactly on the interior of the disks
$\alpha : \partial N' \longrightarrow [0,1]$ be a smooth map which is strictly positive exactly on the interior of the disks  $D'_{\pm}$. Set
$D'_{\pm}$. Set
 \begin{equation*}W_{(x,r)} = ((1+r) \alpha(x) + 1 - r) \cdot W_0(x) \ \ \text{and } \ \ U_{(x,r)} = (r^2-1)\, \theta(x).\end{equation*}
\begin{equation*}W_{(x,r)} = ((1+r) \alpha(x) + 1 - r) \cdot W_0(x) \ \ \text{and } \ \ U_{(x,r)} = (r^2-1)\, \theta(x).\end{equation*} As before, V generates a complete flow ψ on  $\partial N' \times [-1,1]$. We observe the following:
$\partial N' \times [-1,1]$. We observe the following:
(i) For r = 1 we have
$V = (2 \alpha W_0,0)$. Every point outside the interior of the disks $D'_{\pm} \times \{1\}$ is an equilibrium for $\psi'$, and on the interior of the disks themselves the orbits evolve in the usual radial fashion. Thus, as discussed before, $\psi|_{D'_{\pm} \times \{1\}}$ is conjugate via a colour preserving homeomorphism to the model of figure 9(b).(ii) In the region
$-1 \leq r \lt 1$ the phase portrait of ψ is qualitatively the same as that of figure 7. The reason is the following. Suppose $t \longmapsto (x(t),r(t))$ is an integral curve of V passing through a point $(x_0,r_0)$ with x 0 in the interior of some annulus $A_{\tau'}$ and $r_0 \lt 1$. Since the subset r = 1 is invariant we must have $r(t) \lt 1$ for all t and, in particular, the numerical factor that multiplies $W_0(x)$ in the definition of $W_{(x,r)}$ is strictly positive for all t. Now, the derivative of $t \longmapsto \theta(x(t))$ is given by said numerical factor times the derivative of θ in the direction $W_0(x(t))$. The latter is strictly negative by definition of θ, and so $\theta(x(t))$ is strictly decreasing. Thus, again x(t) evolves monotonically across the annulus $A_{\tau'}$, from the white boundary towards the grey boundary. Accordingly r(t) strictly decreases until θ = 0 and then strictly increases again.
















Figure 10(a) shows again a cross section of the flow along a radial segment of an annulus  $A_{\tau'}$ that intersects the disk
$A_{\tau'}$ that intersects the disk  $D'_+$ (say). Notice how points with r = 1 outside
$D'_+$ (say). Notice how points with r = 1 outside  $D'_+$ are now equilibria, while inside
$D'_+$ are now equilibria, while inside  $D'_+$ we still have the same radial flow as before.
$D'_+$ we still have the same radial flow as before.

Figure 10. The flow in a cross section of  $\partial N \times [-1,1]$.
$\partial N \times [-1,1]$.
 $\boxed{\textrm{Step}~3}$ As in Step 3 of proposition 4.1, enlarge N ʹ to a manifold M ʹ by attaching a collar onto its boundary, identify
$\boxed{\textrm{Step}~3}$ As in Step 3 of proposition 4.1, enlarge N ʹ to a manifold M ʹ by attaching a collar onto its boundary, identify  $\partial N' \times (-1,1] \cong M' \setminus K'$, and think of V as a vectorfield on
$\partial N' \times (-1,1] \cong M' \setminus K'$, and think of V as a vectorfield on  $M' \setminus K'$. Multiply it by an appropriate function µ to extend it continuously by zero to K ʹ and use this to generate a new flow
$M' \setminus K'$. Multiply it by an appropriate function µ to extend it continuously by zero to K ʹ and use this to generate a new flow  $\varphi_{M'}$ in M ʹ. This flow has N ʹ as an isolating neighbourhood for K ʹ, and its entry and exit pattern into N ʹ accord to the colouring of
$\varphi_{M'}$ in M ʹ. This flow has N ʹ as an isolating neighbourhood for K ʹ, and its entry and exit pattern into N ʹ accord to the colouring of  $\partial N'$ described at the beginning of the proof. Moreover,
$\partial N'$ described at the beginning of the proof. Moreover,  $\varphi_{M'}$ sweeps across the disks
$\varphi_{M'}$ sweeps across the disks  $D'_{\pm} \times \{1\} \subseteq \partial M'$, as in figure 9(b). The goal now is to attach back to N ʹ the 1-handle we removed when cutting along the disk D while extending the flow
$D'_{\pm} \times \{1\} \subseteq \partial M'$, as in figure 9(b). The goal now is to attach back to N ʹ the 1-handle we removed when cutting along the disk D while extending the flow  $\varphi_{M'}$ appropriately. This we do as follows.
$\varphi_{M'}$ appropriately. This we do as follows.
Consider again the phase portrait of figure 9(b). Define  $H := \mathbb{D}_2 \times [-1,1]$ and endow it with the flow φH, which repeats figure 9(b) on each slice
$H := \mathbb{D}_2 \times [-1,1]$ and endow it with the flow φH, which repeats figure 9(b) on each slice  $\mathbb{D}_2 \times \{t\}$. One should think of H as a 1-handle with pasting disks
$\mathbb{D}_2 \times \{t\}$. One should think of H as a 1-handle with pasting disks  $\mathbb{D}_2 \times \{\pm 1\}$, which we are going to attach onto M ʹ along the disks
$\mathbb{D}_2 \times \{\pm 1\}$, which we are going to attach onto M ʹ along the disks  $D'_{\pm} \times \{1\} \subseteq \partial N' \times \{1\} \subseteq \partial M'$. This we do by choosing pasting homeomorphisms
$D'_{\pm} \times \{1\} \subseteq \partial N' \times \{1\} \subseteq \partial M'$. This we do by choosing pasting homeomorphisms  $\mathbb{D}_2 \times \{\pm 1\} \cong D'_{\pm} \times \{1\}$ which: (a) conjugate φH and
$\mathbb{D}_2 \times \{\pm 1\} \cong D'_{\pm} \times \{1\}$ which: (a) conjugate φH and  $\varphi_{M'}$, (b) are colour preserving, (c) send
$\varphi_{M'}$, (b) are colour preserving, (c) send  $\mathbb{D}_1 \times \{\pm 1\}$ onto
$\mathbb{D}_1 \times \{\pm 1\}$ onto  $D_{\pm} \times \{1\}$, and (d) send
$D_{\pm} \times \{1\}$, and (d) send  $(t_{\pm},1)$ to
$(t_{\pm},1)$ to  $(t,\pm 1)$. These homeomorphisms exist by the discussion at the end of Step 1. The resulting space
$(t,\pm 1)$. These homeomorphisms exist by the discussion at the end of Step 1. The resulting space  $M := M' \cup H$ is a 3-manifold (with corners, but we do not need to worry about differentiability any more), and the flows on M ʹ and H match up on the pasting disks, so there is a well-defined flow φ on M.
$M := M' \cup H$ is a 3-manifold (with corners, but we do not need to worry about differentiability any more), and the flows on M ʹ and H match up on the pasting disks, so there is a well-defined flow φ on M.
Consider the solid tube  $\mathbb{D}_1 \times [-1,1] \subseteq H$ and lengthen it slightly to the solid tube
$\mathbb{D}_1 \times [-1,1] \subseteq H$ and lengthen it slightly to the solid tube
 \begin{equation*}T := D_+ \times [0,1] \cup \mathbb{D}_1 \times [-1,1] \cup D_- \times [0,1] \subseteq M.\end{equation*}
\begin{equation*}T := D_+ \times [0,1] \cup \mathbb{D}_1 \times [-1,1] \cup D_- \times [0,1] \subseteq M.\end{equation*} The bases of this tube are the disks  $D_{\pm} \times \{0\}$, which lie on
$D_{\pm} \times \{0\}$, which lie on  $\partial N'$. Figure 10(b) shows a cross section view of this. The lined region is
$\partial N'$. Figure 10(b) shows a cross section view of this. The lined region is  $D_+ \times [0,1]$, whereas the dotted region extending upwards is (a portion of)
$D_+ \times [0,1]$, whereas the dotted region extending upwards is (a portion of)  $\mathbb{D}_1 \times [-1,1]$; the other end of the tube T looks similar. It is clear from this that the whole tube T is coloured by the flow ψ as shown in figure 11; one should think of the flow as running vertically from the bottom up in the figure.
$\mathbb{D}_1 \times [-1,1]$; the other end of the tube T looks similar. It is clear from this that the whole tube T is coloured by the flow ψ as shown in figure 11; one should think of the flow as running vertically from the bottom up in the figure.

Figure 11. A coloured solid tube T to be pasted onto N'.
It should be clear from the construction so far that  $N' \cup T \subseteq M := M' \cup H$ is an isolating block for K ʹ having
$N' \cup T \subseteq M := M' \cup H$ is an isolating block for K ʹ having  $\mathbb{D}_1 \times \{0\}$ as a cutting disk. Notice that there are two arcs of tangency points running along the lateral face of T. Recall that at the beginning of the proof we distinguished two points
$\mathbb{D}_1 \times \{0\}$ as a cutting disk. Notice that there are two arcs of tangency points running along the lateral face of T. Recall that at the beginning of the proof we distinguished two points  $t_{\pm}$ in
$t_{\pm}$ in  $\partial D_{\pm}$ as well as a point
$\partial D_{\pm}$ as well as a point  $t \in \partial \mathbb{D}_1$, and required that when pasting H onto M ʹ the points
$t \in \partial \mathbb{D}_1$, and required that when pasting H onto M ʹ the points  $(t_+,1)$ and
$(t_+,1)$ and  $(t,-1)$ matched, and similarly at the other end of H. This ensures that the two points
$(t,-1)$ matched, and similarly at the other end of H. This ensures that the two points  $(t_{\pm},0) \in \partial N'$ cobound one of the tangency arcs along T, namely,
$(t_{\pm},0) \in \partial N'$ cobound one of the tangency arcs along T, namely,
 \begin{equation*}a = \underbrace{\{t_+\} \times [0,1]}_{\subseteq D_+ \times [0,1]} \cup \underbrace{\{t\} \times [-1,1]}_{\subseteq \mathbb{D}_1 \times [-1,1]} \cup \underbrace{\{t_-\} \times [0,1]}_{\subseteq D_- \times [0,1]}.\end{equation*}
\begin{equation*}a = \underbrace{\{t_+\} \times [0,1]}_{\subseteq D_+ \times [0,1]} \cup \underbrace{\{t\} \times [-1,1]}_{\subseteq \mathbb{D}_1 \times [-1,1]} \cup \underbrace{\{t_-\} \times [0,1]}_{\subseteq D_- \times [0,1]}.\end{equation*}See figure 11.
 $\boxed{\textrm{Step}~4}$ Finally, we return back to the original problem in
$\boxed{\textrm{Step}~4}$ Finally, we return back to the original problem in  $\mathbb{R}^3$. As usual, we denote by
$\mathbb{R}^3$. As usual, we denote by  $N_{\rm emb} \subseteq \mathbb{R}^3$ the original manifold N embedded in
$N_{\rm emb} \subseteq \mathbb{R}^3$ the original manifold N embedded in  $\mathbb{R}^3$. We have a colour preserving homeomorphism
$\mathbb{R}^3$. We have a colour preserving homeomorphism  $h : N' \longrightarrow N'_{\rm emb}$ (essentially, the identity) and want to extend this to a colour preserving homeomorphism
$h : N' \longrightarrow N'_{\rm emb}$ (essentially, the identity) and want to extend this to a colour preserving homeomorphism  $h : N' \cup T \longrightarrow N_{\rm emb}$. Since
$h : N' \cup T \longrightarrow N_{\rm emb}$. Since  $N_{\rm emb} = N'_{\rm emb} \cup D_{\rm emb} \times [-1,1]$, where D emb is the disk along which we cut N to begin with, we only need to extend h to a colour preserving homeomorphism from T to
$N_{\rm emb} = N'_{\rm emb} \cup D_{\rm emb} \times [-1,1]$, where D emb is the disk along which we cut N to begin with, we only need to extend h to a colour preserving homeomorphism from T to  $D_{\rm emb} \times [-1,1]$. Both T (figure 11) and
$D_{\rm emb} \times [-1,1]$. Both T (figure 11) and  $D_{\rm emb} \times [-1,1]$ (figure 4.(a)) are solid cylinders that look alike, including their colouring, so the existence of such an extension of h seems plausible (there is a slight subtlety, though). To prove it, we will use repeatedly the fact that a homeomorphism between the boundaries of two balls can be extended to a homeomorphism between the two balls (by coning from the centre).
$D_{\rm emb} \times [-1,1]$ (figure 4.(a)) are solid cylinders that look alike, including their colouring, so the existence of such an extension of h seems plausible (there is a slight subtlety, though). To prove it, we will use repeatedly the fact that a homeomorphism between the boundaries of two balls can be extended to a homeomorphism between the two balls (by coning from the centre).
Let us focus first on the two arcs of tangency points running along the boundary of T. One is a; denote the other by b. There are also two arcs of t-curve on the lateral face of  $D_{\rm emb} \times [-1,1] \subseteq N_{\rm emb}$. One of them, say a emb, has
$D_{\rm emb} \times [-1,1] \subseteq N_{\rm emb}$. One of them, say a emb, has  $t_{\pm}$ as its end points by definition (back at the beginning of the proof). Denote the other by b emb. Now, h is already defined on the lined disks
$t_{\pm}$ as its end points by definition (back at the beginning of the proof). Denote the other by b emb. Now, h is already defined on the lined disks  $D_{\pm} \times \{0\} \subseteq \partial T$, and so in particular it is defined on the end points
$D_{\pm} \times \{0\} \subseteq \partial T$, and so in particular it is defined on the end points  $(t_{\pm},0)$ of the arc a, which it carries precisely onto the end points of a emb. Thus, it can be extended to carry the whole arc a onto a emb, and similarly for b and b emb. This is the subtlety we mentioned earlier: had we not been careful, h might have interchanged the end points of a and b, rendering a colour preserving extension impossible.
$(t_{\pm},0)$ of the arc a, which it carries precisely onto the end points of a emb. Thus, it can be extended to carry the whole arc a onto a emb, and similarly for b and b emb. This is the subtlety we mentioned earlier: had we not been careful, h might have interchanged the end points of a and b, rendering a colour preserving extension impossible.
Now focus on the grey half of the lateral face of  $\partial T$. It is a 2-ball bounded by a, b, and half of each of
$\partial T$. It is a 2-ball bounded by a, b, and half of each of  $\partial D_{\pm} \times \{0\}$. The homeomorphism h is already defined on all of them, and so we can extend it to a homeomorphism of the whole grey region onto the corresponding region of the lateral face of
$\partial D_{\pm} \times \{0\}$. The homeomorphism h is already defined on all of them, and so we can extend it to a homeomorphism of the whole grey region onto the corresponding region of the lateral face of  $D_{\rm emb} \times [-1,1]$. The same goes for the white half. We now have h extended to the whole boundary of the 3-ball T onto the boundary of
$D_{\rm emb} \times [-1,1]$. The same goes for the white half. We now have h extended to the whole boundary of the 3-ball T onto the boundary of  $D_{\rm emb} \times [-1,1]$ and finally it can be extended to all of T. By construction this extended homeomorphism
$D_{\rm emb} \times [-1,1]$ and finally it can be extended to all of T. By construction this extended homeomorphism  $h : N' \cup T \longrightarrow N_{\rm emb}$ is colour preserving. The proof then finishes in the usual way, by observing that
$h : N' \cup T \longrightarrow N_{\rm emb}$ is colour preserving. The proof then finishes in the usual way, by observing that  $M = M' \cup H$ is N with a collar attached and using this to extend h to a homeomorphism of M onto a collar of N emb and copy the flow into
$M = M' \cup H$ is N with a collar attached and using this to extend h to a homeomorphism of M onto a collar of N emb and copy the flow into  $\mathbb{R}^3$.
$\mathbb{R}^3$.
4.3.
The proof of theorem 1.5 is now straightforward. We recall its statement:
Theorem 4.3 Let  $(N,P,Q) \subseteq \mathbb{R}^3$ be a tame coloured handlebody. Assume it has a complete system of cutting disks
$(N,P,Q) \subseteq \mathbb{R}^3$ be a tame coloured handlebody. Assume it has a complete system of cutting disks  $\{D_i\}$ such that each
$\{D_i\}$ such that each  $\partial D_i$ intersects
$\partial D_i$ intersects  $\bigcup \tau$ transversally at two points. Then, there exists a flow φ on
$\bigcup \tau$ transversally at two points. Then, there exists a flow φ on  $\mathbb{R}^3$ which realizes N as an isolating block whose maximal invariant subset is a single point.
$\mathbb{R}^3$ which realizes N as an isolating block whose maximal invariant subset is a single point.
Proof. The manifold N ʹ that results by cutting N along the  $\{D_i\}$ is a 3-ball, which evidently has a spine K ʹ consisting of a single point. It follows directly from proposition 4.2 that there is a flow φ in
$\{D_i\}$ is a 3-ball, which evidently has a spine K ʹ consisting of a single point. It follows directly from proposition 4.2 that there is a flow φ in  $\mathbb{R}^3$ which realizes N as an isolating block for the rest point K ʹ.
$\mathbb{R}^3$ which realizes N as an isolating block for the rest point K ʹ.
5. Proof of theorem 1.6
The fundamental group of a handlebody N is free in some generators  $\{x_i\}$. When the handlebody is coloured every t-curve defines an element of this group (up to conjugacy since no basepoint is fixed), i.e., a word in the letters
$\{x_i\}$. When the handlebody is coloured every t-curve defines an element of this group (up to conjugacy since no basepoint is fixed), i.e., a word in the letters  $x_i^{\pm 1}$ in the manner described in § 1. The geometric condition of theorem 1.1(ii) can be reformulated in terms of these words, and the powerful machinery of free groups applied to obtain theorem 1.6. However, to keep the discussion as simple as possible, we will hide these algebraic foundations of our discussion and adopt a very pedestrian approach instead, formulating everything in terms of purely syntactical manipulations of words.
$x_i^{\pm 1}$ in the manner described in § 1. The geometric condition of theorem 1.1(ii) can be reformulated in terms of these words, and the powerful machinery of free groups applied to obtain theorem 1.6. However, to keep the discussion as simple as possible, we will hide these algebraic foundations of our discussion and adopt a very pedestrian approach instead, formulating everything in terms of purely syntactical manipulations of words.
5.1.
Let  $\{x_1,x_1^{-1},\ldots,x_g,x_g^{-1}\}$ be a collection of letters, where each xi and
$\{x_1,x_1^{-1},\ldots,x_g,x_g^{-1}\}$ be a collection of letters, where each xi and  $x_i^{-1}$ should be thought of as inverses of each other. A word W means a (finite) sequence of letters. Its inverse W −1 is the same sequence written backwards and with each letter replaced with its inverse. There is an empty word, denoted by 1, with no letters. A word is cyclically reduced if it has no consecutive pairs of the form
$x_i^{-1}$ should be thought of as inverses of each other. A word W means a (finite) sequence of letters. Its inverse W −1 is the same sequence written backwards and with each letter replaced with its inverse. There is an empty word, denoted by 1, with no letters. A word is cyclically reduced if it has no consecutive pairs of the form  $x_i x_i^{-1}$ or
$x_i x_i^{-1}$ or  $x_i^{-1} x_i$ and the same condition holds for its last and first letters (hence the word ‘cyclically’). By successively cancelling pairs of letters of this sort until no further cancellation is possible, every word W gives rise to a cyclically reduced word which is unique save for cyclic permutations (i.e., moving the last symbol of the word to the beginning of the word). The algebraic length (or simply ‘length’) of a word is the number of letters in its cyclically reduced form.
$x_i^{-1} x_i$ and the same condition holds for its last and first letters (hence the word ‘cyclically’). By successively cancelling pairs of letters of this sort until no further cancellation is possible, every word W gives rise to a cyclically reduced word which is unique save for cyclic permutations (i.e., moving the last symbol of the word to the beginning of the word). The algebraic length (or simply ‘length’) of a word is the number of letters in its cyclically reduced form.
Suppose W is a word in the letters  $x_i^{\pm 1}$. By substituting each appearance of xi in W with some other word Vi, and those of
$x_i^{\pm 1}$. By substituting each appearance of xi in W with some other word Vi, and those of  $x_i^{-1}$ with
$x_i^{-1}$ with  $V_i^{-1}$, one performs a substitution. We consider substitutions τ of the following two types:
$V_i^{-1}$, one performs a substitution. We consider substitutions τ of the following two types:
(1) τ permutes the letters
$x_i^{\pm 1}$ among themselves.(2) For some fixed letter
$a \in \{x_i^{\pm 1}\}$, called the multiplier, τ leaves $a^{\pm 1}$ unchanged and replaces every other xi with one of these four possibilities: xi itself, $x_i a$, $a^{-1} x_i$, or $a^{-1} x_i a$. In other words, each xi may or may not acquire an a on the right and may or may not acquire an a −1 on the left.






These are called Whitehead substitutions. Clearly they are all reversible, with the inverse being another Whitehead substitution. Also, there are only finitely many of these substitutions. For the sake of brevity let us write  $S \sim S'$ to denote that S ʹ arises from S by performing finitely many Whitehead substitutions sequentially, possibly accompanied by (cyclic) reductions. ∼ is an equivalence relation.
$S \sim S'$ to denote that S ʹ arises from S by performing finitely many Whitehead substitutions sequentially, possibly accompanied by (cyclic) reductions. ∼ is an equivalence relation.
The algebraic length of a finite set of words is the sum of the algebraic lengths of its members. Fix some finite set of words S. We shall say that a set  $S_{\rm min} \sim S$ is a minimal form of S if it achieves the minimum algebraic length among all
$S_{\rm min} \sim S$ is a minimal form of S if it achieves the minimum algebraic length among all  $S' \sim S$. There may exist several minimal forms of S, of course all with the same algebraic length. A celebrated theorem of Whitehead ([Reference Whitehead16]; for a more condensed proof, see [Reference Lyndon and Schupp8, proposition 4.20, p. 35]) states the following:
$S' \sim S$. There may exist several minimal forms of S, of course all with the same algebraic length. A celebrated theorem of Whitehead ([Reference Whitehead16]; for a more condensed proof, see [Reference Lyndon and Schupp8, proposition 4.20, p. 35]) states the following:
(i) If
$S' \sim S$ is not minimal, there exists a Whitehead substitution which reduces its algebraic length.(ii) Given any two minimal forms of S, there exists a sequence of Whitehead substitutions that carries one onto the other while keeping the algebraic length the same at each step.

Notice, in particular, that (i) gives a procedure to find a minimal form of S. One starts with S and applies a Whitehead substitution to all the words in S, cyclically reducing the resulting words and obtaining a new set S ʹ. If the algebraic length of S ʹ is not smaller than that of S, one tries again with a different Whitehead substitution. Since there are only finitely many of these, after some time one either finds a substitution τ which reduces the length of S or finds that none does. In the latter case, S is already minimal. In the former case, one throws S away and starts again with  $\tau(S)$. Evidently, this process finishes after a finite number of steps (no more than the algebraic length of S) and returns a minimal set
$\tau(S)$. Evidently, this process finishes after a finite number of steps (no more than the algebraic length of S) and returns a minimal set  $S_{\rm min} \sim S$. We will call this algorithm ‘Whitehead reduction’. See example 5.5 for an illustration.
$S_{\rm min} \sim S$. We will call this algorithm ‘Whitehead reduction’. See example 5.5 for an illustration.
5.2.
Given a set of words S in the letters  $x_i^{\pm 1}$, we are interested in the following algebraic condition:
$x_i^{\pm 1}$, we are interested in the following algebraic condition:
(A) For every i, the letters  $x_i^{\pm 1}$ either do not appear at all among the words in S or both appear, exactly once each.
$x_i^{\pm 1}$ either do not appear at all among the words in S or both appear, exactly once each.
Observe that if S satisfies condition (A) then, after cyclically reducing its words, it still satisfies the condition (since any reduction involves cancelling a pair  $x_i^{\pm 1}$). Now we examine the effect of a Whitehead substitution:
$x_i^{\pm 1}$). Now we examine the effect of a Whitehead substitution:
Lemma 5.1. Suppose S satisfies (A). Let τ be a Whitehead substitution such that the length of  $\tau(S)$ is not bigger than the length of S. Then, after cyclic reduction,
$\tau(S)$ is not bigger than the length of S. Then, after cyclic reduction,  $\tau(S)$ also satisfies (A).
$\tau(S)$ also satisfies (A).
Proof. We can take S to be cyclically reduced. Otherwise, we replace it with its cyclic reduction, which still satisfies (A).
If τ is just a permutation of the variables the result is obvious, so suppose τ is a substitution with multiplier a. In passing from S to  $\tau(S)$, no new letters
$\tau(S)$, no new letters  $x_i^{\pm 1}$ different from
$x_i^{\pm 1}$ different from  $a^{\pm 1}$ are inserted, so for those letters condition (A) is satisfied in
$a^{\pm 1}$ are inserted, so for those letters condition (A) is satisfied in  $\tau(S)$ because it was already satisfied in S. Thus, to prove the lemma, we only need to show that (after cyclic reduction) a and a −1 do not appear in
$\tau(S)$ because it was already satisfied in S. Thus, to prove the lemma, we only need to show that (after cyclic reduction) a and a −1 do not appear in  $\tau(S)$, or appear exactly once each.
$\tau(S)$, or appear exactly once each.
When one acts with τ on a word W one obtains a new word  $\tau(W)$ which is in principle longer than W since several instances of a and a −1 will generally have been inserted. This might lead to the appearance of portions
$\tau(W)$ which is in principle longer than W since several instances of a and a −1 will generally have been inserted. This might lead to the appearance of portions  $...a a^{-1}...$ and
$...a a^{-1}...$ and  $...a^{-1} a...$ that can be cancelled out. It can be shown that if the original word W was cyclically reduced, only these cancellations involving the multiplier a are possible in
$...a^{-1} a...$ that can be cancelled out. It can be shown that if the original word W was cyclically reduced, only these cancellations involving the multiplier a are possible in  $\tau(W)$ ([Reference Lyndon and Schupp8, Proof of proposition 4.16, p. 31]). Thus, the change in length from S to
$\tau(W)$ ([Reference Lyndon and Schupp8, Proof of proposition 4.16, p. 31]). Thus, the change in length from S to  $\tau(S)$ equals the change in the number of appearances of a and a −1 in S to
$\tau(S)$ equals the change in the number of appearances of a and a −1 in S to  $\tau(S)$ (after cyclic reduction). In turn, this equals
$\tau(S)$ (after cyclic reduction). In turn, this equals
 \begin{equation*}2(\# \text{appearances of } a \text{in } \tau(S) - \# \text{appearances of } a \text{in } S)\end{equation*}
\begin{equation*}2(\# \text{appearances of } a \text{in } \tau(S) - \# \text{appearances of } a \text{in } S)\end{equation*} because a and a −1 appear both the same number of times in S and also in  $\tau(S)$. Indeed, this property is true in S for every letter by condition (A) and is then preserved upon applying τ, since whenever a letter xi acquires an a on its right (say),
$\tau(S)$. Indeed, this property is true in S for every letter by condition (A) and is then preserved upon applying τ, since whenever a letter xi acquires an a on its right (say),  $x_i^{-1}$ acquires an a −1 on its left, balancing the count of a versus a −1 in
$x_i^{-1}$ acquires an a −1 on its left, balancing the count of a versus a −1 in  $\tau(S)$ again.
$\tau(S)$ again.
Since, by assumption, the length of  $\tau(S)$ is not bigger than that of S, it follows from the formula above that the number of appearances of a (hence also of a −1) in
$\tau(S)$ is not bigger than that of S, it follows from the formula above that the number of appearances of a (hence also of a −1) in  $\tau(S)$ is not bigger than its number of appearances in S, which is at most 1 by condition (A). This finishes the proof.
$\tau(S)$ is not bigger than its number of appearances in S, which is at most 1 by condition (A). This finishes the proof.
Lemma 5.2. Let S be a finite set of words. Then, the following are equivalent:
(a) There exists
$S' \sim S$ that satisfies (A).(b) Every minimal form of S satisfies (A).

In particular, either every minimal form of S satisfies (A) or none does.
Proof. Evidently (b)  $\Rightarrow$ (a), since minimal forms always exist. To prove the converse, assume
$\Rightarrow$ (a), since minimal forms always exist. To prove the converse, assume  $S' \sim S$ satisfies (A) and S min is any minimal form of S. By parts (i) and (ii) of Whitehead’s theorem, we can go from S ʹ to S min by first applying a sequence of Whitehead substitutions τ that decrease the length at each step (until we arrive at some minimal form of S) and then another sequence of Whitehead substitutions τ that keeps the length constant at each step and arrives at S min. We know from lemma 5.1 that all these τ preserve condition (A). Thus, S min satisfies (A) because S ʹ did.
$S' \sim S$ satisfies (A) and S min is any minimal form of S. By parts (i) and (ii) of Whitehead’s theorem, we can go from S ʹ to S min by first applying a sequence of Whitehead substitutions τ that decrease the length at each step (until we arrive at some minimal form of S) and then another sequence of Whitehead substitutions τ that keeps the length constant at each step and arrives at S min. We know from lemma 5.1 that all these τ preserve condition (A). Thus, S min satisfies (A) because S ʹ did.
In fact, it can be shown that a set S satisfying (A) is already very close to being minimal.
5.3.
We finally return to the problem at hand, namely, recognizing when a coloured handlebody has a complete cut system that satisfies condition (ii) in theorem 1.1. First, we explain the geometric interpretation of the preceding discussion.
Let N be a handlebody with a cut system  $\{D_1,\ldots,D_g\}$. Cut N open along this system to obtain a 3-ball. Fix as a basepoint
$\{D_1,\ldots,D_g\}$. Cut N open along this system to obtain a 3-ball. Fix as a basepoint  $*$ the centre of the ball and consider 2g straight segments joining it with the centre of each of the disks
$*$ the centre of the ball and consider 2g straight segments joining it with the centre of each of the disks  $D_i^{\pm}$ on the boundary of the ball. If we now glue together each pair
$D_i^{\pm}$ on the boundary of the ball. If we now glue together each pair  $D_i^+, D_i^-$, we recover the handlebody N together with a collection of g closed curves
$D_i^+, D_i^-$, we recover the handlebody N together with a collection of g closed curves  $b_1,\ldots,b_g$ based at
$b_1,\ldots,b_g$ based at  $*$ such that each of them pierces exactly one Di, and just once. Their homotopy classes
$*$ such that each of them pierces exactly one Di, and just once. Their homotopy classes  $\{[b_1],\ldots,[b_g]\}$ form a basis for the free group
$\{[b_1],\ldots,[b_g]\}$ form a basis for the free group  $\pi_1(N,*)$.
$\pi_1(N,*)$.
Suppose s is an oriented closed curve in  $\partial N$ and assign to it a word
$\partial N$ and assign to it a word  $V(x_1,\ldots,x_g)$ as described in § 1. Choose any path α that joins the basepoint
$V(x_1,\ldots,x_g)$ as described in § 1. Choose any path α that joins the basepoint  $*$ to any point in s and consider the concatenation
$*$ to any point in s and consider the concatenation  $\alpha * s * \alpha^{-1}$ which is a loop based at
$\alpha * s * \alpha^{-1}$ which is a loop based at  $*$. The expression of
$*$. The expression of  $[\alpha* s* \alpha^{-1}]$ in the basis
$[\alpha* s* \alpha^{-1}]$ in the basis  $\{b_i\}$ is then conjugate to the element
$\{b_i\}$ is then conjugate to the element  $V([b_1],\ldots,[b_g]) \in \pi_1(N,*)$. This word depends on the choice of α; however, its conjugacy class does not and so as a cyclically reduced word V depends only on s. This is how cyclic words arise in our context.
$V([b_1],\ldots,[b_g]) \in \pi_1(N,*)$. This word depends on the choice of α; however, its conjugacy class does not and so as a cyclically reduced word V depends only on s. This is how cyclic words arise in our context.
Whitehead substitutions also have a geometric interpretation. Given a complete cut system  $\{D_1,\ldots,D_g\}$ for a handlebody, there is a geometric manipulation that generates a new system
$\{D_1,\ldots,D_g\}$ for a handlebody, there is a geometric manipulation that generates a new system  $\{D_1,\ldots,D'_i,\ldots,D_g\}$ by replacing one of the disks Di with a new disk
$\{D_1,\ldots,D'_i,\ldots,D_g\}$ by replacing one of the disks Di with a new disk  $D'_i$ constructed as a band sum of the old Di and some other Dj. If an oriented curve s in
$D'_i$ constructed as a band sum of the old Di and some other Dj. If an oriented curve s in  $\partial N$ spelled the word V with respect to the cut system
$\partial N$ spelled the word V with respect to the cut system  $\{D_i\}$, the word V ʹ that it spells with respect to
$\{D_i\}$, the word V ʹ that it spells with respect to  $\{D'_i\}$ is obtained by a substitution with the general structure
$\{D'_i\}$ is obtained by a substitution with the general structure  $x_j \rightarrow x_j x_i$ (with minor variations such as
$x_j \rightarrow x_j x_i$ (with minor variations such as  $x_j x_i^{-1}$ and
$x_j x_i^{-1}$ and  $x_i x_j$, depending on the orientations assigned to the disks and how the band sum is performed). Observe that this is a Whitehead substitution. Now, it is a theorem that any two complete cut systems of N can be related to each other by a sequence of these manipulations, and so the following lemma holds:
$x_i x_j$, depending on the orientations assigned to the disks and how the band sum is performed). Observe that this is a Whitehead substitution. Now, it is a theorem that any two complete cut systems of N can be related to each other by a sequence of these manipulations, and so the following lemma holds:
Lemma 5.3. Suppose N is a coloured handlebody of genus g and  $\{D_i\}$ and
$\{D_i\}$ and  $\{D'_i\}$ are two cut systems for N. Let S and S ʹ be the sets of words obtained by reading the t-curves with respect to these two cut systems. Then
$\{D'_i\}$ are two cut systems for N. Let S and S ʹ be the sets of words obtained by reading the t-curves with respect to these two cut systems. Then  $S \sim S'$.
$S \sim S'$.
The above argument illuminates the geometric reason for the lemma but omits many details. Here is an alternative, algebraic proof:
Proof of lemma 5.3
The two cut systems give rise to bases  $\{[b_i]\}$ and
$\{[b_i]\}$ and  $\{[b'_i]\}$ of
$\{[b'_i]\}$ of  $\pi_1(N)$ as explained before. Each
$\pi_1(N)$ as explained before. Each  $[b_i]$ can be expressed as
$[b_i]$ can be expressed as  $U_i([b^{\prime}_1],\ldots,[b^{\prime}_g])$, where the word
$U_i([b^{\prime}_1],\ldots,[b^{\prime}_g])$, where the word  $U_i(x_1,\ldots,x_g)$ records the intersections of bi with the
$U_i(x_1,\ldots,x_g)$ records the intersections of bi with the  $\{D'_i\}$. Let
$\{D'_i\}$. Let  $V(x_1,\ldots,x_g)$ be one of the words in S, i.e., the word read off from one of the t-curves τ in N with respect to the cut system
$V(x_1,\ldots,x_g)$ be one of the words in S, i.e., the word read off from one of the t-curves τ in N with respect to the cut system  $\{D_1,\ldots,D_g\}$. Then,
$\{D_1,\ldots,D_g\}$. Then,  $[\tau] = V([b_1],\ldots,[b_g])$ in
$[\tau] = V([b_1],\ldots,[b_g])$ in  $\pi_1(N)$ and
$\pi_1(N)$ and
 \begin{equation*}[\tau] = V(U_1([b^{\prime}_1],\ldots,[b^{\prime}_g]),\ldots,U_g([b^{\prime}_1],\ldots,[b^{\prime}_g]))\end{equation*}
\begin{equation*}[\tau] = V(U_1([b^{\prime}_1],\ldots,[b^{\prime}_g]),\ldots,U_g([b^{\prime}_1],\ldots,[b^{\prime}_g]))\end{equation*}so the word  $V(U_1(x_1,\ldots,x_g),\ldots,U_g(x_1,\ldots,x_g))$ expresses
$V(U_1(x_1,\ldots,x_g),\ldots,U_g(x_1,\ldots,x_g))$ expresses  $[\tau]$ in the basis
$[\tau]$ in the basis  $\{b_i\}$. Since such an expression is unique, the set of words S ʹ and the set of words
$\{b_i\}$. Since such an expression is unique, the set of words S ʹ and the set of words  $\{V(U_1,\ldots,U_g) : V \in S\}$ must coincide after cyclic reduction.
$\{V(U_1,\ldots,U_g) : V \in S\}$ must coincide after cyclic reduction.
Since both  $\{[b_i]\}$ and
$\{[b_i]\}$ and  $\{[b'_i]\}$ are a basis for
$\{[b'_i]\}$ are a basis for  $\pi_1(N)$, there exists an automorphism that carries the first onto the second (by the definition of a free group there exist endomorphisms of
$\pi_1(N)$, there exists an automorphism that carries the first onto the second (by the definition of a free group there exist endomorphisms of  $\pi_1(N)$ that carry
$\pi_1(N)$ that carry  $\{[b_i]\}$ onto
$\{[b_i]\}$ onto  $\{[b'_i]\}$ and vice versa; their composition in both orders is the identity again by the definition of a free group). Whitehead substitutions encompass the so-called Nielsen substitutions, and the latter already suffice to generate all automorphisms of a free group ([Reference Lyndon and Schupp8, proposition 4.1, p. 23]). Thus, there exists a sequence of Whitehead substitutions that carries
$\{[b'_i]\}$ and vice versa; their composition in both orders is the identity again by the definition of a free group). Whitehead substitutions encompass the so-called Nielsen substitutions, and the latter already suffice to generate all automorphisms of a free group ([Reference Lyndon and Schupp8, proposition 4.1, p. 23]). Thus, there exists a sequence of Whitehead substitutions that carries  $\{U_1,\ldots,U_g\}$ to
$\{U_1,\ldots,U_g\}$ to  $\{x_1,\ldots,x_g\}$. If we apply this sequence of Whitehead substitutions on the set
$\{x_1,\ldots,x_g\}$. If we apply this sequence of Whitehead substitutions on the set  $\{V(U_1,\ldots,U_g) : V \in S\}$, we evidently get (after cyclic reduction) the set S back. Thus,
$\{V(U_1,\ldots,U_g) : V \in S\}$, we evidently get (after cyclic reduction) the set S back. Thus,
 \begin{equation*}S^{\prime} = \{V(U_1,\ldots,U_g): V \in S\} \sim S\end{equation*}
\begin{equation*}S^{\prime} = \{V(U_1,\ldots,U_g): V \in S\} \sim S\end{equation*}as claimed.
We can now prove theorem 1.5, which we recall here as follows:
Theorem 5.4 Let N be a coloured handlebody with a non-empty collection of t-curves. Let  $\{D_1,\ldots,D_g\}$ be any cut system for N and let S be the collection of words in the letters
$\{D_1,\ldots,D_g\}$ be any cut system for N and let S be the collection of words in the letters  $x_i^{\pm 1}$ obtained by reading the t-curves, oriented as the boundary of the grey region. Denote by S min any minimal form of S. Then, the following are equivalent:
$x_i^{\pm 1}$ obtained by reading the t-curves, oriented as the boundary of the grey region. Denote by S min any minimal form of S. Then, the following are equivalent:
(a) N satisfies the geometric criterion with respect to some complete cut system
$\{D'_i\}$.(b) S min satisfies (A).

Example 5.5. Figure 3 showed a handlebody N whose t-curves spell the words  $S = \{x_1 x_2 x_1 x_2 x_2, x_2^{-1}x_2^{-1}x_1^{-1},x_1^{-1}x_2^{-1}\}$ with respect to the cut system
$S = \{x_1 x_2 x_1 x_2 x_2, x_2^{-1}x_2^{-1}x_1^{-1},x_1^{-1}x_2^{-1}\}$ with respect to the cut system  $\{D_1,D_2\}$. We apply Whitehead reduction as follows. The substitution
$\{D_1,D_2\}$. We apply Whitehead reduction as follows. The substitution  $x_1 \mapsto x_1x_2^{-1}, x_2 \mapsto x_2$ (i.e., multiplier
$x_1 \mapsto x_1x_2^{-1}, x_2 \mapsto x_2$ (i.e., multiplier  $a = x_2^{-1}$) produces the set
$a = x_2^{-1}$) produces the set  $S' = \{x_1x_1x_2,x_1^{-1}x_2^{-1},x_1^{-1}\}$, which has a smaller algebraic length than S (6 versus 10). We now substitute
$S' = \{x_1x_1x_2,x_1^{-1}x_2^{-1},x_1^{-1}\}$, which has a smaller algebraic length than S (6 versus 10). We now substitute  $x_1 \mapsto x_1, x_2 \mapsto x_1^{-1}x_2$ (multiplier
$x_1 \mapsto x_1, x_2 \mapsto x_1^{-1}x_2$ (multiplier  $a = x_1$) and get
$a = x_1$) and get  $S'' = \{x_1x_2,x_1^{-1},x_2^{-1}\}$. It is easy to see that no substitution can reduce its length any more, so this is a minimal set S min equivalent to S.
$S'' = \{x_1x_2,x_1^{-1},x_2^{-1}\}$. It is easy to see that no substitution can reduce its length any more, so this is a minimal set S min equivalent to S.
Proof of theorem 5.4
(a)  $\Rightarrow$ (b) We have that each
$\Rightarrow$ (b) We have that each  $\partial D'_i$ intersects
$\partial D'_i$ intersects  $\bigcup \tau$ exactly twice and transversally. Thus, as we travel once along
$\bigcup \tau$ exactly twice and transversally. Thus, as we travel once along  $\partial D'_i$, we run into
$\partial D'_i$, we run into  $\bigcup \tau$ exactly twice, crossing from the white region to the grey one (say) and then back to the white one. Therefore, xi and
$\bigcup \tau$ exactly twice, crossing from the white region to the grey one (say) and then back to the white one. Therefore, xi and  $x_i^{-1}$ appear exactly once each among the unreduced words read off by the t-curves. (They appear with opposite exponents due to the orientation of the t-curves as the boundary of the grey region.) Hence the set S ʹ of words read by the t-curves with respect to
$x_i^{-1}$ appear exactly once each among the unreduced words read off by the t-curves. (They appear with opposite exponents due to the orientation of the t-curves as the boundary of the grey region.) Hence the set S ʹ of words read by the t-curves with respect to  $\{D'_i\}$ satisfies condition (A). We have
$\{D'_i\}$ satisfies condition (A). We have  $S' \sim S$ by lemma 5.3, and then by lemma 5.2, the set S min also satisfies (A).
$S' \sim S$ by lemma 5.3, and then by lemma 5.2, the set S min also satisfies (A).
(b)  $\Rightarrow$ (a) Consider all complete cut systems for N, which intersect
$\Rightarrow$ (a) Consider all complete cut systems for N, which intersect  $\bigcup \tau$ transversally. Since these intersections consist of finitely many points, there exists one such system
$\bigcup \tau$ transversally. Since these intersections consist of finitely many points, there exists one such system  $\{D'_i\}$, which minimizes the cardinality of
$\{D'_i\}$, which minimizes the cardinality of  $\left( \bigcup \partial D'_i \right) \cap \left( \bigcup \tau \right)$. Let S ʹ be the set of words read out by the t-curves with respect to this system. By a theorem of Zieschang ([Reference Zieschang17, Theorem 1, p. 128], but see also [Reference Waldhausen15, p. 318] or [Reference Kaneto7] for simpler proofs), all words in S ʹ are cyclically reduced and S ʹ is a minimal form of S. Since, by assumption, there is a minimal form of S, which satisfies (A), so does S ʹ by lemma 5.2. This directly implies that each of the curves
$\left( \bigcup \partial D'_i \right) \cap \left( \bigcup \tau \right)$. Let S ʹ be the set of words read out by the t-curves with respect to this system. By a theorem of Zieschang ([Reference Zieschang17, Theorem 1, p. 128], but see also [Reference Waldhausen15, p. 318] or [Reference Kaneto7] for simpler proofs), all words in S ʹ are cyclically reduced and S ʹ is a minimal form of S. Since, by assumption, there is a minimal form of S, which satisfies (A), so does S ʹ by lemma 5.2. This directly implies that each of the curves  $\partial D'_i$ either intersects
$\partial D'_i$ either intersects  $\bigcup \tau$ exactly twice (if
$\bigcup \tau$ exactly twice (if  $x_i^{\pm 1}$ appears in S ʹ) or does not intersect it at all (if it does not). Notice that we are using here that the words read off by the t-curves in
$x_i^{\pm 1}$ appears in S ʹ) or does not intersect it at all (if it does not). Notice that we are using here that the words read off by the t-curves in  $\{D'_i\}$ are already cyclically reduced, and so they accurately record all intersections with
$\{D'_i\}$ are already cyclically reduced, and so they accurately record all intersections with  $\bigcup D'_i$. (Otherwise there might exist consecutive pairs of intersections with the same disk, in the form
$\bigcup D'_i$. (Otherwise there might exist consecutive pairs of intersections with the same disk, in the form  $x_i x_i^{-1}$, which would cancel out during cyclic reduction. In that case the resulting set S ʹ would underestimate the number of intersections with
$x_i x_i^{-1}$, which would cancel out during cyclic reduction. In that case the resulting set S ʹ would underestimate the number of intersections with  $\bigcup D'_i$.)
$\bigcup D'_i$.)
We are almost finished. We only need to fix the situation when some of the  $\partial D'_i$ do no intersect
$\partial D'_i$ do no intersect  $\bigcup \tau$ at all. Say, for definiteness, that one of them is
$\bigcup \tau$ at all. Say, for definiteness, that one of them is  $\partial D'_1$. By definition
$\partial D'_1$. By definition  $\bigcup \partial D'_i$ does not separate
$\bigcup \partial D'_i$ does not separate  $\partial N$, and by assumption
$\partial N$, and by assumption  $\bigcup \tau$ is non-empty, so there is an arc that joins a point in
$\bigcup \tau$ is non-empty, so there is an arc that joins a point in  $\partial D'_1$ to a point in
$\partial D'_1$ to a point in  $\bigcup \tau$ while being disjoint from the remaining
$\bigcup \tau$ while being disjoint from the remaining  $\partial D'_i$. Travel along this arc starting from its end point in
$\partial D'_i$. Travel along this arc starting from its end point in  $\partial D'_1$ until first hitting
$\partial D'_1$ until first hitting  $\bigcup \tau$. Discarding the rest of the arc, we have an arc a whose interior is disjoint from all the
$\bigcup \tau$. Discarding the rest of the arc, we have an arc a whose interior is disjoint from all the  $\partial D'_i$ and all the t-curves and whose end points lie one on
$\partial D'_i$ and all the t-curves and whose end points lie one on  $\partial D'_1$ and another on some t-curve (figure 12(a)).
$\partial D'_1$ and another on some t-curve (figure 12(a)).

Figure 12. Ensuring that a cutting disk intersects the system of t-curves.
Drag a tiny portion of  $\partial D'_1$ along the arc a until it intersects τ in two very closely spaced points (panels (b) and (c) in figure 12). This is performed by an isotopy of
$\partial D'_1$ along the arc a until it intersects τ in two very closely spaced points (panels (b) and (c) in figure 12). This is performed by an isotopy of  $\partial N$ supported in a small neighbourhood of a and can be extended to an isotopy of N again supported in a small neighbourhood of a (in N) which, in particular, we can take to be disjoint from all the remaining
$\partial N$ supported in a small neighbourhood of a and can be extended to an isotopy of N again supported in a small neighbourhood of a (in N) which, in particular, we can take to be disjoint from all the remaining  $D'_i$. The extended isotopy produces carries
$D'_i$. The extended isotopy produces carries  $D'_1$ onto a new disk
$D'_1$ onto a new disk  $D''_1$, which together with the remaining
$D''_1$, which together with the remaining  $D'_i$ is a new cut system for N where now
$D'_i$ is a new cut system for N where now  $\partial D''_1$ intersects the system of t-curves transversally exactly twice. Repeating this procedure if necessary, we can then obtain a new complete cut system that now satisfies the geometric criterion.
$\partial D''_1$ intersects the system of t-curves transversally exactly twice. Repeating this procedure if necessary, we can then obtain a new complete cut system that now satisfies the geometric criterion.
We conclude with an observation: only the essential t-curves in N are relevant as far as the geometric criterion is concerned. Ultimately, this owes to the fact that any inessential t-curve in a coloured handlebody N can be pulled off (via an isotopy) all the disks in a cut system  $\{D_i\}$ without introducing any new intersections. This can be proved directly by a somewhat tedious cut-and-paste argument, but it also follows directly from the theorem above. Indeed, the set of words S min is just the expression of the conjugacy classes of the t-curves of N in a certain basis of the fundamental group
$\{D_i\}$ without introducing any new intersections. This can be proved directly by a somewhat tedious cut-and-paste argument, but it also follows directly from the theorem above. Indeed, the set of words S min is just the expression of the conjugacy classes of the t-curves of N in a certain basis of the fundamental group  $\pi_1(N)$. The inessential (i.e., contractible) t-curves are precisely those that correspond to the empty word 1. Clearly, empty words can be disregarded when checking the algebraic condition (A), and the claim follows.
$\pi_1(N)$. The inessential (i.e., contractible) t-curves are precisely those that correspond to the empty word 1. Clearly, empty words can be disregarded when checking the algebraic condition (A), and the claim follows.
6. Models that satisfy the geometric criterion
This last and brief section is motivated by the following ill-posed, but intuitively appealing, question. Suppose one observes an isolating block N which is a handlebody with a complicated pattern of tangency curves. Is it likely that its maximal invariant subset has a non-trivial one-dimensional cohomology? Roughly, we need to count how many colourings of a given handlebody satisfy the geometric criterion. Of course, there are infinitely many that do (for example, any colouring with all t-curves inessential) and infinitely many that do not (any colouring with three or more parallel, essential t-curves). In spite of this, the very simple discussion in this section shows that there is a certain finiteness property in the collection of all colourings that satisfy the geometric criterion of theorem 1.1.
6.1.
Recall the handlebody Hg with its standard cutting system  $\{D_i\}$ shown in figure 1. Suppose that it is endowed with a colouring that satisfies the geometric criterion with respect to
$\{D_i\}$ shown in figure 1. Suppose that it is endowed with a colouring that satisfies the geometric criterion with respect to  $\{D_i\}$. Focus only on the essential t-curves
$\{D_i\}$. Focus only on the essential t-curves  $\{\tau'\}$, which must all intersect
$\{\tau'\}$, which must all intersect  $\bigcup D_i$. Cutting Hg open along the Di we obtain a 3-ball B with 2g distinguished disks
$\bigcup D_i$. Cutting Hg open along the Di we obtain a 3-ball B with 2g distinguished disks  $D_i^{\pm}$ on its boundary
$D_i^{\pm}$ on its boundary  $\partial B$, each with at most two marked points in
$\partial B$, each with at most two marked points in  $\partial D_i^{\pm}$ corresponding to the intersection of
$\partial D_i^{\pm}$ corresponding to the intersection of  $\partial D_i$ with
$\partial D_i$ with  $\bigcup \tau'$. The t-curves
$\bigcup \tau'$. The t-curves  $\tau'$ give rise to a collection of at most 2g pairwise disjoint arcs in
$\tau'$ give rise to a collection of at most 2g pairwise disjoint arcs in  $\overline{\partial B \setminus \bigcup D_i^{\pm}}$ whose end points are the marked points in the boundaries of the
$\overline{\partial B \setminus \bigcup D_i^{\pm}}$ whose end points are the marked points in the boundaries of the  $D_i^{\pm}$. It is not difficult to see that there are only finitely many of these collections
$D_i^{\pm}$. It is not difficult to see that there are only finitely many of these collections  $\mathcal{A}$ of arcs up to isotopies fixing the disks
$\mathcal{A}$ of arcs up to isotopies fixing the disks  $D_i^{\pm}$. The reason is that the isotopy class of
$D_i^{\pm}$. The reason is that the isotopy class of  $\mathcal{A}$ depends only on how the arcs pair the marked points and what distinguished disks are enclosed by cycles of arcs. Returning to the handlebody Hg by pasting back together each pair
$\mathcal{A}$ depends only on how the arcs pair the marked points and what distinguished disks are enclosed by cycles of arcs. Returning to the handlebody Hg by pasting back together each pair  $D_i^{\pm}$, we conclude that any colouring of Hg which satisfies the geometric criterion with respect to the system
$D_i^{\pm}$, we conclude that any colouring of Hg which satisfies the geometric criterion with respect to the system  $\{D_i\}$ must be, after removal of its inessential t-curves, isotopic to one of finitely many models
$\{D_i\}$ must be, after removal of its inessential t-curves, isotopic to one of finitely many models  $\{\mathcal{M}_i^g\}$ on Hg.
$\{\mathcal{M}_i^g\}$ on Hg.
Figures 13 and 14 below show all possible models for genera g = 1 and g = 2. In figure 13(a), the model contains no curves; there is a similar empty model for every genus (not shown in figure 14). Empty models correspond to the case when all the t-curves in the colouring of Hg are inessential. We remark that, because the models  $\{\mathcal{M}_i^g\}$ only show the essential t-curves of a colouring, some of them may not be colourable ‘as is’. For instance, the model in figure 14(b) needs an inessential t-curve to be added so that it can be coloured (see figure 15).
$\{\mathcal{M}_i^g\}$ only show the essential t-curves of a colouring, some of them may not be colourable ‘as is’. For instance, the model in figure 14(b) needs an inessential t-curve to be added so that it can be coloured (see figure 15).

Figure 13. Models for genus 1.

Figure 14. Models for genus 2.

Figure 15. An example of model (b) in Figure 14.
To generate these models we have essentially reversed the argument given in the previous paragraph, starting with four disjoint disks in the boundary of a 3-ball with at most two marked points on the boundary of each and listing all possible collections of arcs joining those up to isotopy relative to the disks. One should bear in mind that this procedure is very inefficient and many of the configurations it produces have to be discarded because they include inessential curves, or they are equivalent up to a homeomorphism, or they cannot be completed (by adding inessential t-curves) to a collection that can be coloured.
6.2.
We return to dynamics with the following proposition, which should be interpreted as a sort of (very weak) Hartman–Grobman theorem. For an isolated invariant set with a trivial one-dimensional cohomology it provides, up to a local topological conjugacy, ‘essentially finitely many models’ for its possible isolating blocks and their entry and exit patterns. It does not say anything about the dynamics inside the block.
Proposition 6.1. Suppose  $N \subseteq \mathbb{R}^3$ is an isolating block with a connected boundary. Assume that its maximal invariant subset K has a trivial one-dimensional cohomology. As we know by theorem 1.1, N must be a handlebody of some genus g. There exists a flow ψ on
$N \subseteq \mathbb{R}^3$ is an isolating block with a connected boundary. Assume that its maximal invariant subset K has a trivial one-dimensional cohomology. As we know by theorem 1.1, N must be a handlebody of some genus g. There exists a flow ψ on  $\mathbb{R}^3$ which realizes Hg as an isolating block such that:
$\mathbb{R}^3$ which realizes Hg as an isolating block such that:
(i) There exist open neighbourhoods U of N and V of Hg and a homeomorphism
$h : U \longrightarrow V$ which carries N onto Hg and conjugates φ and ψ.(ii) The essential tangency curves in Hg accord to one of the finitely models
$\{\mathcal{M}_i^g\}$ corresponding to genus g.


Proof. By theorem 1.1 the system of tangency curves of N satisfies the geometric condition for some complete cut system  $\{D'_i\}$. There is a homeomorphism
$\{D'_i\}$. There is a homeomorphism  $h_1 : N \longrightarrow H_g$ which carries each
$h_1 : N \longrightarrow H_g$ which carries each  $D'_i$ onto the corresponding Di. This is a standard, purely topological fact about handlebodies, and it is easily proved by first cutting both N and Hg open into 3-balls, each with 2g marked disks, and constructing a homeomorphism between these two balls that matches corresponding disks.
$D'_i$ onto the corresponding Di. This is a standard, purely topological fact about handlebodies, and it is easily proved by first cutting both N and Hg open into 3-balls, each with 2g marked disks, and constructing a homeomorphism between these two balls that matches corresponding disks.
Copying the colouring of N onto Hg via h 1 we obtain a colouring of Hg which evidently satisfies the geometric criterion with respect to  $\{D_i\}$, and so there exists a homeomorphim h 2 of Hg which carries the essential t-curves of the colouring onto one of the finitely many models
$\{D_i\}$, and so there exists a homeomorphim h 2 of Hg which carries the essential t-curves of the colouring onto one of the finitely many models  $\mathcal{M}_i^g$. The composition
$\mathcal{M}_i^g$. The composition  $h := h_2 \circ h_1 : N \longrightarrow H_g$ then carries the essential tangency curves of N onto
$h := h_2 \circ h_1 : N \longrightarrow H_g$ then carries the essential tangency curves of N onto  $\mathcal{M}_i^g$. Since N is tame by definition and Hg is obviously tame, both can be slightly enlarged within
$\mathcal{M}_i^g$. Since N is tame by definition and Hg is obviously tame, both can be slightly enlarged within  $\mathbb{R}^3$ by adding external collars to their boundaries, obtaining neighbourhoods
$\mathbb{R}^3$ by adding external collars to their boundaries, obtaining neighbourhoods  $U = N \cup \partial N \times [0,1)$ and
$U = N \cup \partial N \times [0,1)$ and  $B = H_g \cup \partial H_g \times [0,1)$ of N and Hg. h can be extended to a homeomorphism
$B = H_g \cup \partial H_g \times [0,1)$ of N and Hg. h can be extended to a homeomorphism  $h : U \longrightarrow V$ in the obvious way. Copying the (now local) flow in U to V via h produces a local flow ψ there, which can easily be extended to a complete flow in
$h : U \longrightarrow V$ in the obvious way. Copying the (now local) flow in U to V via h produces a local flow ψ there, which can easily be extended to a complete flow in  $\mathbb{R}^3$ by slowing it down to a halt near
$\mathbb{R}^3$ by slowing it down to a halt near  ${\rm fr}\ V$ and letting all points outside V be stationary.
${\rm fr}\ V$ and letting all points outside V be stationary.
Acknowledgements
We thank the anonymous referee for their quick reading of the article and feedback regarding it.
Funding
The author is funded by the Spanish Ministerio de Ciencia e Innovación through grants PGC2018-098321-B-I00 and RYC2018-025843-I.



















 Open access
Open access