



No CrossRef data available.
Published online by Cambridge University Press: 23 December 2024
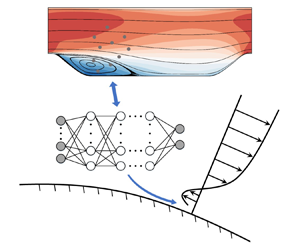
Developing large-eddy simulation (LES) wall models for separated flows is challenging. We propose to leverage the significance of separated flow data, for which existing theories are not applicable, and the existing knowledge of wall-bounded flows (such as the law of the wall) along with embedded learning to address this issue. The proposed so-called features-embedded-learning (FEL) wall model comprises two submodels: one for predicting the wall shear stress and another for calculating the eddy viscosity at the first off-wall grid nodes. We train the former using the wall-resolved LES (WRLES) data of the periodic hill flow and the law of the wall. For the latter, we propose a modified mixing length model, with the model coefficient trained using the ensemble Kalman method. The proposed FEL model is assessed using the separated flows with different flow configurations, grid resolutions and Reynolds numbers. Overall good a posteriori performance is observed for predicting the statistics of the recirculation bubble, wall stresses and turbulence characteristics. The statistics of the modelled subgrid-scale (SGS) stresses at the first off-wall grids are compared with those calculated using the WRLES data. The comparison shows that the amplitude and distribution of the SGS stresses and energy transfer obtained using the proposed model agree better with the reference data when compared with the conventional SGS model.