







Crossref Citations
This article has been cited by the following publications. This list is generated based on data provided by Crossref.
Taebel, Z.
McAllister, M. L.
Scotti, A.
Onorato, M.
and
van den Bremer, T. S.
2024.
Laboratory study of wave turbulence under isotropic forcing.
Physical Review Fluids,
Vol. 9,
Issue. 9,
Panayotaros, P.
and
Vargas-Magaña, R.M.
2025.
Low mode interactions in water wave model in triangular domain.
Wave Motion,
Vol. 134,
Issue. ,
p.
103453.
Kayal, Lohit
Sanjay, Vatsal
Yewale, Nikhil
Kumar, Anil
and
Dasgupta, Ratul
2025.
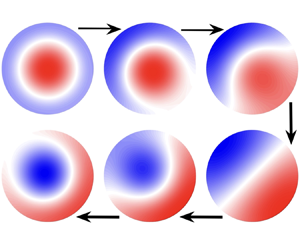
Focussing of concentric free-surface waves.
Journal of Fluid Mechanics,
Vol. 1003,
Issue. ,