



No CrossRef data available.
Published online by Cambridge University Press: 29 April 2024
A primary objective of integral methods, such as the momentum integral method, is to discern the physical processes contributing to skin friction. These methods encompass the momentum, kinetic energy and angular momentum integrals. This paper reformulates existing integrals based on the double-averaged Navier–Stokes equations, and extends their application to flows over rough walls. Our derivation yields distinct decompositions for the bottom-wall viscous friction coefficient, denoted as  $C_S$, and the roughness element drag coefficient
$C_S$, and the roughness element drag coefficient  $C_R$. The decompositions comprise three terms: a viscous term, a turbulent term and a roughness (dispersive) term – regardless of the flow configuration, be it channel or boundary layer. Notably, when these integrals are evaluated for laminar flow scenarios, only the viscous term remains significant. In addition, we elucidate the spatial distributions of the terms within these decompositions. To demonstrate the practicality of our formulations, we apply them to analyse data from direct numerical simulations of turbulent half-channel flows. These flows feature aligned and staggered cubical roughness at various packing densities. Our analyses, based on kinetic-energy-oriented decompositions, reveal that when the surface coverage density
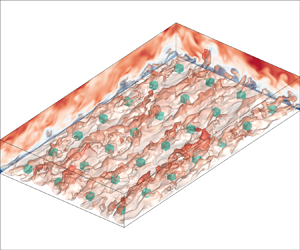
$C_R$. The decompositions comprise three terms: a viscous term, a turbulent term and a roughness (dispersive) term – regardless of the flow configuration, be it channel or boundary layer. Notably, when these integrals are evaluated for laminar flow scenarios, only the viscous term remains significant. In addition, we elucidate the spatial distributions of the terms within these decompositions. To demonstrate the practicality of our formulations, we apply them to analyse data from direct numerical simulations of turbulent half-channel flows. These flows feature aligned and staggered cubical roughness at various packing densities. Our analyses, based on kinetic-energy-oriented decompositions, reveal that when the surface coverage density  $\lambda _p$ is small, the dominant terms within the decompositions are the viscous and turbulent terms. With increasing
$\lambda _p$ is small, the dominant terms within the decompositions are the viscous and turbulent terms. With increasing  $\lambda _p$, the viscous dissipation term decreases, while the turbulent production term increases and then decreases. These variations arise from a subdued near-wall cycle and the development of a shear layer at the height of the cubes.
$\lambda _p$, the viscous dissipation term decreases, while the turbulent production term increases and then decreases. These variations arise from a subdued near-wall cycle and the development of a shear layer at the height of the cubes.
 $Re_{{\theta }}=13\,650$. J. Fluid Mech. 743, 202–248.CrossRefGoogle Scholar
$Re_{{\theta }}=13\,650$. J. Fluid Mech. 743, 202–248.CrossRefGoogle Scholar $Re_\tau = 4200$. Phys. Fluids 26 (1), 011702.CrossRefGoogle Scholar
$Re_\tau = 4200$. Phys. Fluids 26 (1), 011702.CrossRefGoogle Scholar