




Crossref Citations
This article has been cited by the following publications. This list is generated based on data provided by Crossref.
Kazmierczak, Elise
Gregov, Thomas
Coulon, Violaine
and
Pattyn, Frank
2024.
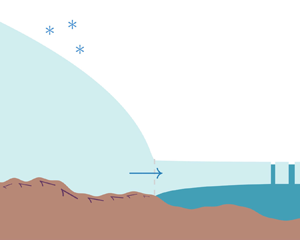
A fast and simplified subglacial hydrological model for the Antarctic Ice Sheet and outlet glaciers.
The Cryosphere,
Vol. 18,
Issue. 12,
p.
5887.