



No CrossRef data available.
Article contents
Exotic flotation theory with new method for floating stability analysis
Published online by Cambridge University Press: 18 October 2023
Abstract
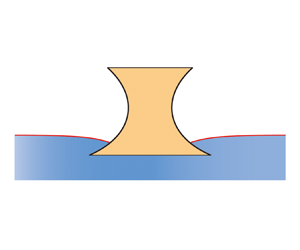
A macroscale floating object moving downwards will encounter an increasing buoyancy force exerted by the liquid. However, considering the surface tension and the deformed meniscus, we find an exotic floating object of specific shape that withstands a constant total force exerted by the liquid when it moves vertically and slowly. This constant total force consists of the surface tension force and the hydrostatic pressure force, from which a model to determine the shape of the exotic floating object is proposed. Results show that there exist three types of exotic floating objects in both the two-dimensional symmetric and axisymmetric cases, dependent on their concavity and convexity. To ensure that the menisci around the exotic floating objects can be sustained in practice, the stabilities of these menisci are checked. Apart from the meniscus stabilities (of liquid surfaces), the floating stabilities (of solid objects) are also studied. It is demonstrated that the exotic floating object remains in a critical state of floating stabilities no matter where this object locates vertically, from which a new method to predict the floating stabilities for general floating objects of arbitrary shape is put forward, based on the contact angle and the geometrical parameters at the contact point. With the new method, the floating stabilities can be predicted conveniently, without performing an extra force analysis.
JFM classification
- Type
- JFM Papers
- Information
- Copyright
- © The Author(s), 2023. Published by Cambridge University Press
References
Basualdo, F.N.P., Bolopion, A., Gauthier, M. & Lambert, P. 2021 A microrobotic platform actuated by thermocapillary flows for manipulation at the air–water interface. Sci. Robot. 6, eabd3557.CrossRefGoogle Scholar
Bhatnagar, R. & Finn, R. 2006 Equilibrium configurations of an infinite cylinder in an unbounded fluid. Phys. Fluids 18 (4), 047103.CrossRefGoogle Scholar
Bhatnagar, R. & Finn, R. 2016 On the capillarity equation in two dimensions. J. Math. Fluid Mech. 18 (4), 731–738.CrossRefGoogle Scholar
Bostwick, J.B. & Steen, P.H. 2015 Stability of constrained capillary surfaces. Annu. Rev. Fluid Mech. 47, 539–568.CrossRefGoogle Scholar
Bowden, N., Terfort, A., Carbeck, J. & Whitesides, G.M. 1997 Self-assembly of mesoscale objects into ordered two-dimensional arrays. Science 276, 233–235.CrossRefGoogle ScholarPubMed
Bush, J.W.M. & Hu, D.L. 2006 Walking on water: biolocomotion at the interface. Annu. Rev. Fluid Mech. 38, 339–369.CrossRefGoogle Scholar
Callahan, M., Concus, P. & Finn, R. 1991 Energy minimizing capillary surfaces for exotic containers. In Computing Optimal Geometries (ed. J.E. Taylor), pp. 13–15. AMS.Google Scholar
Chen, H. & Siegel, D. 2018 A floating cylinder on an unbounded bath. J. Math. Fluid Mech. 20 (4), 1373–1404.CrossRefGoogle Scholar
Concus, P. & Finn, R. 1991 Exotic containers for capillary surfaces. J. Fluid Mech. 224, 383–394.CrossRefGoogle Scholar
Concus, P., Finn, R. & Weislogel, M. 1999 Capillary surfaces in an exotic container: results from space experiments. J. Fluid Mech. 394, 119–135.CrossRefGoogle Scholar
Finn, R. 1988 Non uniqueness and uniqueness of capillary surfaces. Manuscr. Math. 61, 347–372.CrossRefGoogle Scholar
Hu, W., Lum, G.Z., Mastrangeli, M. & Sitti, M. 2018 Small-scale soft-bodied robot with multimodal locomotion. Nature 554 (7690), 81–85.CrossRefGoogle ScholarPubMed
Huh, C. & Scriven, L.E. 1969 Shapes of axisymmetric fluid interfaces of unbounded extent. J. Colloid Interface Sci. 30, 323–337.CrossRefGoogle Scholar
Keller, J.B. 1998 Surface tension force on a partly submerged body. Phys. Fluids 10 (11), 3009–3010.CrossRefGoogle Scholar
Lowry, B.J. & Steen, P.H. 1995 Capillary surfaces: stability from families of equilibria with application to the liquid bridge. Proc. R. Soc. Lond. A 449, 411–439.Google Scholar
Mccuan, J. & Treinen, R. 2013 Capillarity and Archimedes’ principle. Pac. J. Maths 265, 123–150.CrossRefGoogle Scholar
Myshkis, A.D., Babskii, V.G., Kopachevskii, N.D., Slobozhanin, L.A., Tyuptsov, A.D. & Wadhwa, R.S. 1987 Low-gravity Fluid Mechanics. Springer.CrossRefGoogle Scholar
Pesci, A.I., Goldstein, R.E., Alexander, G.P. & Moffatt, H.K. 2015 Instability of a Möbius strip minimal surface and a link with systolic geometry. Phys. Rev. Lett. 114, 127801.CrossRefGoogle Scholar
Slobozhanin, L.A. & Alexander, J.I.D. 2003 Stability diagrams for disconnected capillary surfaces. Phys. Fluids 15, 3532–3545.CrossRefGoogle Scholar
Slobozhanin, L.A. & Perales, J.M. 1993 Stability of liquid bridges between equal disks in an axial gravity field. Phys. Fluids A 5 (6), 1305–1314.CrossRefGoogle Scholar
Slobozhanin, L.A. & Tyuptsov, A.D. 1974 Characteristic stability parameter of the axisymmetric equilibrium surface of a capillary liquid. Fluid Dyn. 9, 563–571.CrossRefGoogle Scholar
Tan, D., Zhang, F. & Zhou, X. 2022 Surface tension force on a partially submerged horizontal concave cylinder. J. Fluid Mech. 950, A15.CrossRefGoogle Scholar
Vella, D., Lee, D.G. & Kim, H.Y. 2006 The load supported by small floating objects. Langmuir 22 (14), 5979–5981.CrossRefGoogle ScholarPubMed
Zhang, F. & Zhou, X. 2020 a Capillary surfaces in and around exotic cylinders with application to stability analysis. J. Fluid Mech. 882, A28.CrossRefGoogle Scholar
Zhang, F. & Zhou, X. 2020 b General exotic capillary tube. J. Fluid Mech. 885, A1.CrossRefGoogle Scholar
Zhang, F., Zhou, X. & Zhu, C. 2018 Effects of surface tension on a floating body in two dimensions. J. Fluid Mech. 847, 489–519.CrossRefGoogle Scholar