



1. Introduction
In science and engineering, different computational models can be derived to make realizations of the quantities of interest (QoIs) of a process or an event happening in reality. High-fidelity (HF) models can result in highly accurate and robust realizations, but running them is typically computationally expensive. In contrast, different low-fidelity (LF) models with lower computational cost can be developed for the same process which, however, potentially lead to lower accuracy QoIs due to partial or completely missing physics captured by the model. On the other hand, in different applications arising in uncertainty quantification (UQ), data fusion, and optimization, of numerous realizations of the QoIs are required, associated with the samples taken from the space of the inputs/parameters in order to make reliable estimations (these non-intrusive problems are referred to as the outer-loop problems). In this regard, multifidelity models (MFMs) can be constructed by combining realizations of the HF and LF models such that a balance between the overall computational cost and predictive accuracy is achieved. The goal is to provide, by combining HF and LF models, an estimate of the QoI that is better than any of the models alone.
In the recent years, different types of MFMs have been applied to a wide range of problems, see e.g. the recent review by Peherstorfer, Willcox & Gunzburger (Reference Peherstorfer, Willcox and Gunzburger2018). The use of the MFMs in studies of turbulent flows can be greatly advantageous, considering the wide range of engineering applications relying on these flows and also the high cost generally involved in the HF computations (such as scale-resolving simulations) and experiments of the turbulent flows. There is a distinguishable hierarchy in the fidelity of the computational models utilized for simulation of turbulence, (see e.g. Sagaut, Deck & Terracol Reference Sagaut, Deck and Terracol2013). Let us consider the wall-bounded turbulent flows where a turbulent boundary layer forms at the wall boundaries. Direct numerical simulation (DNS) can provide the highest-fidelity results for a given turbulent flow, however, it can become prohibitively expensive at high Reynolds numbers which are relevant to practical applications. The computational cost can be reduced by employing large eddy simulation (LES) which aims at directly resolving the scales larger than a defined size and modelling the unresolved effects. At the lowest cost and fidelity level, Reynolds-averaged Navier–Stokes (RANS) simulations can be performed which avoid directly resolving any flow fluctuations by resorting to a statistical description of turbulence. Between RANS and wall-resolving LES, other approaches such as hybrid RANS–LES and wall-modelled LES can be considered (see Sagaut et al. Reference Sagaut, Deck and Terracol2013; Larsson et al. Reference Larsson, Kawai, Bodart and Bermejo-Moreno2016). Although this clear hierarchy is extremely beneficial when constructing MFMs, as will be thoroughly discussed and demonstrated in the present paper, there is a challenge to be dealt with: the realizations of different turbulence simulation approaches are, in general, sensitive to various modelling and numerical parameters as well as inputs. At lower fidelities like RANS, modelling effects are dominant while as moving towards LES and DNS, numerical factors become more relevant, including grid resolution and discretization properties. Hereafter, these fidelity-specific controlling parameters are referred to as tuning or calibration parameters.
Combining training data from different turbulence simulation approaches, MFMs are constructed over the space of design and uncertain parameters/inputs. An appropriate approach to construct MFMs for turbulent flow problems should systematically allow for simultaneous calibration of the tuning parameters. An appropriate methodology which is employed in the present study is the hierarchical multifidelity predictive model developed in Higdon et al. (Reference Higdon, Kennedy, Cavendish, Cafeo and Ryne2004) and Goh et al. (Reference Goh, Bingham, Holloway, Grosskopf, Kuranz and Rutter2013) in which the calibration parameters of the involved fidelities are estimated using the data of the higher-fidelity models. This MFM, which is hereafter referred to as HC-MFM, can also incorporate the observational uncertainties. The HC-MFM can be seen as an extension of the model by Higdon et al. (Reference Higdon, Kennedy, Cavendish, Cafeo and Ryne2004) which was employed to combine experimental (field) and simulation data. A fundamental component of this class of MFMs is the Bayesian calibration of the computer models, as described in the landmark paper by Kennedy & O'Hagan (Reference Kennedy and O'Hagan2001). At each level of the MFM, the Gaussian process regression (GPR) (Rasmussen & Williams Reference Rasmussen and Williams2005) is employed to construct surrogates for the simulators.
The application of the HC-MFM in the field of computational fluid dynamics (CFD) and turbulent flows is novel, and we make specific adaptations suitable for turbulence simulations. In this regard, the present paper aims at assessing the useful potential of the HC-MFM by applying it to three examples relevant to engineering wall-bounded turbulent flows. To highlight the contributions of the present work, the existing studies in the literature devoted to the development and application of the MFMs to CFD and turbulent flows are briefly reviewed here by classifying them according to their underlying MFM strategy. (i) A model was originally introduced by Kennedy & O'Hagan (Reference Kennedy and O'Hagan2000) where a QoI at each fidelity is expressed as a first-order autoregressive model of the same QoI at the immediately lower fidelity. Co-kriging using GPR to construct surrogates is classified in this category, see e.g. Fatou Gomez (Reference Fatou Gomez2018); Voet et al. (Reference Voet, Ahlfeld, Gaymann, Laizet and Montomoli2021) for applications to turbulence simulations. To enhance the computational efficiency of the co-kriging for several fidelity levels, recursive algorithms have been proposed and applied to CFD problems, see Gratiet & Garnier (Reference Gratiet and Garnier2014); Perdikaris et al. (Reference Perdikaris, Venturi, Royset and Karniadakis2015). (ii) A class of MFMs has been developed based on non-intrusive polynomial chaos expansion (PCE) and stochastic collocation methods (Ng & Eldred Reference Ng and Eldred2012; Palar, Tsuchiya & Parks Reference Palar, Tsuchiya and Parks2016), where an additive or a multiplicative term is considered to correct the LF model's predictions against the HF model. (iii) The multi-level multifidelity Monte Carlo (MLMF-MC) models (Fairbanks et al. Reference Fairbanks, Doostan, Ketelsen and Iaccarino2017; Geraci, Eldred & Iaccarino Reference Geraci, Eldred and Iaccarino2017) are appropriate for the UQ forward problems. These models are developed by combining multilevel (Giles Reference Giles2008) and control-variate (Pasupathy et al. Reference Pasupathy, Schmeiser, Taaffe and Wang2012) MC methods to improve the rate of convergence of the stochastic moments of the QoIs compared with the the standard MC method. Jofre et al. (Reference Jofre, Geraci, Fairbanks, Doostan and Iaccarino2018) applied MLMF-MC models to an irradiated particle-laden turbulent flow. The HF model was considered to be DNS and the two LF models were based on a surrogate particle approach and lower resolutions for flow and particles. (iv) Other models including the hierarchical kriging model based on GPR where the predictions of a LF model are taken as the trend in the HF kriging, see Han & Görtz (Reference Han and Görtz2012).
Recently, Voet et al. (Reference Voet, Ahlfeld, Gaymann, Laizet and Montomoli2021) compared inverse weighted distance-, PCE- and co-kriging-based MFMs using the data of RANS and DNS for the turbulent flow over a periodic hill, and concluded that the co-kriging model outperforms the others in terms of accuracy. This is the first (and to our knowledge only) study where MFMs have been applied to engineering-relevant RANS and DNS data for the purpose of uncertainty propagation. Voet et al. (Reference Voet, Ahlfeld, Gaymann, Laizet and Montomoli2021) also found that the performance of the co-kriging can deteriorate when there is no significant correlation between the RANS and DNS data and at the same time there is a significant deviation between them. Motivated by this deficiency, we adapt and use the HC-MFM where the discrepancy between the data (and not their correlation) over the space of design parameters is learned using independent Gaussian processes. The model is absolutely generative and can be extended to an arbitrary number of fidelity levels. Besides the systematic calibration of the fidelity-specific parameters during its training stage, the HC-MFM is also capable of handling uncertain data, as for instance happens when QoIs are turbulence statistics computed over a finite time-averaging interval (recently, a framework was proposed by Rezaeiravesh, Vinuesa & Schlatter (Reference Rezaeiravesh, Vinuesa and Schlatter2022) to combine these observational uncertainties with parametric ones). Relying on these characteristics, the HC-MFM is suitable for application to the data of various turbulence simulation methodologies to address different types of the outer-loop problems. In contrast to all the previous studies (at least in CFD), we adopt a Bayesian inference to construct the HC-MFM, a feature which results in more accurate models as well as estimating confidence intervals for the predictions.
The rest of the paper is organized as follows. In § 2, various elements of the HC-MFM approach are introduced and explained. Section 3 is devoted to the application of the HC-MFM to an illustrative example, turbulent channel flow, polars for an airfoil and analysis of the geometrical uncertainties in the turbulent flow over a periodic hill. The summary of the paper along with the conclusions is presented in § 4.
2. Method
In this section, the hierarchical MFM with calibration (HC-MFM) developed by Goh et al. (Reference Goh, Bingham, Holloway, Grosskopf, Kuranz and Rutter2013), which forms the basis for the present study is reviewed. We will proceed by sequentially going through the aspects of GPR, model calibration and eventually the HC-MFM formulation. The workflow of the HC-MFM represented in figure 1 may help connect the following technical details.

Figure 1. Schematic representation of the machinery for constructing the HC-MFM over the space of design/uncertain parameters  $\boldsymbol {x}$. To make realizations of the QoI of the problem in hand, there is a hierarchy of fidelities where each fidelity may have its own parameters and also some parameters shared with others (together called
$\boldsymbol {x}$. To make realizations of the QoI of the problem in hand, there is a hierarchy of fidelities where each fidelity may have its own parameters and also some parameters shared with others (together called  $\boldsymbol {\theta }$). For joint samples of
$\boldsymbol {\theta }$). For joint samples of  $\boldsymbol {x}$ and
$\boldsymbol {x}$ and  $\boldsymbol {\theta }$, training data for the QoI are generated (or are available) in a way that more samples are taken for LF models which are less costly to evaluate. The priors for
$\boldsymbol {\theta }$, training data for the QoI are generated (or are available) in a way that more samples are taken for LF models which are less costly to evaluate. The priors for  $\boldsymbol {\theta }$ and GPs’ hyperparameters
$\boldsymbol {\theta }$ and GPs’ hyperparameters  $\boldsymbol {\beta }$ are defined after the HC-MFM is formulated as, for instance, (2.6). Given the training data, an MCMC sampling method is used to infer the posteriors of
$\boldsymbol {\beta }$ are defined after the HC-MFM is formulated as, for instance, (2.6). Given the training data, an MCMC sampling method is used to infer the posteriors of  $\boldsymbol {\theta }$ and
$\boldsymbol {\theta }$ and  $\boldsymbol {\beta }$.
$\boldsymbol {\beta }$.
2.1. Gaussian process regression
In general, the Gaussian processes (GPs) provide a way to systematically build a representation of the QoI as a function of the various inputs to the model. Eventually, regression can be performed by evaluating the GP at new inputs not seen by the model before. Let  $\boldsymbol {x}\in \mathbb {X}\subset \mathbb {R}^{p_{\boldsymbol {x}}}$ represent the controllable inputs and parameters, adopting the notation from Kennedy & O'Hagan (Reference Kennedy and O'Hagan2001). As a convention, all boldface letters are hereafter considered to be a vector or a matrix. The design and uncertain parameters appearing in optimization and UQ analyses, respectively, can also be classified as
$\boldsymbol {x}\in \mathbb {X}\subset \mathbb {R}^{p_{\boldsymbol {x}}}$ represent the controllable inputs and parameters, adopting the notation from Kennedy & O'Hagan (Reference Kennedy and O'Hagan2001). As a convention, all boldface letters are hereafter considered to be a vector or a matrix. The design and uncertain parameters appearing in optimization and UQ analyses, respectively, can also be classified as  $\boldsymbol {x}$. A GP
$\boldsymbol {x}$. A GP  $\hat {f}(\boldsymbol {x})$ can be employed to map the inputs
$\hat {f}(\boldsymbol {x})$ can be employed to map the inputs  $\boldsymbol {x}$ to a QoI or an output
$\boldsymbol {x}$ to a QoI or an output  $y\subset \mathbb {R}$ of the computer codes (simulators) or field data. For a finite set of training samples
$y\subset \mathbb {R}$ of the computer codes (simulators) or field data. For a finite set of training samples  $\{\boldsymbol {x}_1, \boldsymbol {x}_2,\ldots,\boldsymbol {x}_n\}$ with corresponding observations
$\{\boldsymbol {x}_1, \boldsymbol {x}_2,\ldots,\boldsymbol {x}_n\}$ with corresponding observations  $\{y_1,y_2,\ldots,y_n\}$, the collection of
$\{y_1,y_2,\ldots,y_n\}$, the collection of  $\{\hat {f}(\boldsymbol {x}_1),\hat {f}(\boldsymbol {x}_2),\ldots,\hat {f}(\boldsymbol {x}_n)\}$ will have a joint Gaussian (multivariate normal) distribution (Rasmussen & Williams Reference Rasmussen and Williams2005). The GP
$\{\hat {f}(\boldsymbol {x}_1),\hat {f}(\boldsymbol {x}_2),\ldots,\hat {f}(\boldsymbol {x}_n)\}$ will have a joint Gaussian (multivariate normal) distribution (Rasmussen & Williams Reference Rasmussen and Williams2005). The GP  $\hat {f}(\boldsymbol {x})$ is written as
$\hat {f}(\boldsymbol {x})$ is written as
 \begin{equation} \hat{f}(\boldsymbol{x})\sim \mathcal{GP}(m(\boldsymbol{x}),k(\boldsymbol{x},\boldsymbol{x}')) , \end{equation}
\begin{equation} \hat{f}(\boldsymbol{x})\sim \mathcal{GP}(m(\boldsymbol{x}),k(\boldsymbol{x},\boldsymbol{x}')) , \end{equation}
which is fully described by its mean  $m(\boldsymbol {x})$ and covariance function
$m(\boldsymbol {x})$ and covariance function  $k(\boldsymbol {x},\boldsymbol {x}')$ defined as
$k(\boldsymbol {x},\boldsymbol {x}')$ defined as
 $$\begin{gather} m(\boldsymbol{x}) = \mathbb{E}[\hat{f}(\boldsymbol{x})] , \end{gather}$$
$$\begin{gather} m(\boldsymbol{x}) = \mathbb{E}[\hat{f}(\boldsymbol{x})] , \end{gather}$$ $$\begin{gather}k(\boldsymbol{x},\boldsymbol{x}') = \mathbb{E}[(\hat{f}(\boldsymbol{x})-m(\boldsymbol{x})) (\hat{f}(\boldsymbol{x}')-m(\boldsymbol{x}'))]. \end{gather}$$
$$\begin{gather}k(\boldsymbol{x},\boldsymbol{x}') = \mathbb{E}[(\hat{f}(\boldsymbol{x})-m(\boldsymbol{x})) (\hat{f}(\boldsymbol{x}')-m(\boldsymbol{x}'))]. \end{gather}$$
In general, the GPs can be used in the case of having observation noise  $\boldsymbol {\varepsilon }$ in the
$\boldsymbol {\varepsilon }$ in the  $y$ data. Using an additive error model, we have
$y$ data. Using an additive error model, we have
 \begin{equation} y(\boldsymbol{x})=\hat{f}(\boldsymbol{x})+\boldsymbol{\varepsilon} , \end{equation}
\begin{equation} y(\boldsymbol{x})=\hat{f}(\boldsymbol{x})+\boldsymbol{\varepsilon} , \end{equation}
where the noises are assumed to be independent and have Gaussian distribution  $\boldsymbol {\varepsilon }\sim \mathcal {N}(0,\sigma ^2)$.
$\boldsymbol {\varepsilon }\sim \mathcal {N}(0,\sigma ^2)$.
In the GPR, given a set of training data  $\mathcal {D}=\{\boldsymbol {x}_i,y_i\}_{i=1}^n$ the posterior and posterior predictive distributions of
$\mathcal {D}=\{\boldsymbol {x}_i,y_i\}_{i=1}^n$ the posterior and posterior predictive distributions of  $\hat {f}({\cdot })$ and
$\hat {f}({\cdot })$ and  $y$, respectively, at test inputs
$y$, respectively, at test inputs  $\boldsymbol {x}^* \in \mathbb {X}$, can be inferred in a Bayesian framework (Rasmussen & Williams Reference Rasmussen and Williams2005). To this end, first a prior distribution for
$\boldsymbol {x}^* \in \mathbb {X}$, can be inferred in a Bayesian framework (Rasmussen & Williams Reference Rasmussen and Williams2005). To this end, first a prior distribution for  $\hat {f}(\boldsymbol {x})$, see (2.1), is assumed through specifying functions for the mean and covariance in (2.2) and (2.3), where there are unknown hyperparameters
$\hat {f}(\boldsymbol {x})$, see (2.1), is assumed through specifying functions for the mean and covariance in (2.2) and (2.3), where there are unknown hyperparameters  $\boldsymbol {\beta }$ in the functions. Using the training data, the posterior distribution of
$\boldsymbol {\beta }$ in the functions. Using the training data, the posterior distribution of  $\boldsymbol {\beta }$ is learned. As a main advantage of the GPR, the predictions at test samples will be accompanied by an estimate of uncertainty, see (A1) and (A2) in Appendix A.
$\boldsymbol {\beta }$ is learned. As a main advantage of the GPR, the predictions at test samples will be accompanied by an estimate of uncertainty, see (A1) and (A2) in Appendix A.
2.2. Model calibration
As pointed out in § 1, the outputs of computational models (simulators) at a given  $\boldsymbol {x}$ may depend on different tuning or calibration parameters,
$\boldsymbol {x}$ may depend on different tuning or calibration parameters,  $\boldsymbol {t}\in \mathbb {T}\subset \mathbb {R}^{p_{\boldsymbol {t}}}$. Given a set of observations, these parameters can be calibrated through conducting a UQ inverse problem which can be expressed in a Bayesian framework (Kennedy & O'Hagan Reference Kennedy and O'Hagan2001). The calibrated model can then not only be employed for prediction, but also for fusion of the field and simulation data, see Higdon et al. (Reference Higdon, Kennedy, Cavendish, Cafeo and Ryne2004). Consider
$\boldsymbol {t}\in \mathbb {T}\subset \mathbb {R}^{p_{\boldsymbol {t}}}$. Given a set of observations, these parameters can be calibrated through conducting a UQ inverse problem which can be expressed in a Bayesian framework (Kennedy & O'Hagan Reference Kennedy and O'Hagan2001). The calibrated model can then not only be employed for prediction, but also for fusion of the field and simulation data, see Higdon et al. (Reference Higdon, Kennedy, Cavendish, Cafeo and Ryne2004). Consider  $n_1$ data samples
$n_1$ data samples  $\{(\boldsymbol {x}_i,y_i)\}_{i=1}^{n_1}$ are observed for a physical process
$\{(\boldsymbol {x}_i,y_i)\}_{i=1}^{n_1}$ are observed for a physical process  $\zeta (\boldsymbol {x})$. To statistically model the observations, a simulator
$\zeta (\boldsymbol {x})$. To statistically model the observations, a simulator  $\hat {f}(\boldsymbol {x},\boldsymbol {\theta })$ can be employed in which the
$\hat {f}(\boldsymbol {x},\boldsymbol {\theta })$ can be employed in which the  $\boldsymbol {\theta }$ are the true or optimal values of
$\boldsymbol {\theta }$ are the true or optimal values of  $\boldsymbol {t}$ and are to be estimated from the training data. However, in general, it is possible that even the calibrated simulator
$\boldsymbol {t}$ and are to be estimated from the training data. However, in general, it is possible that even the calibrated simulator  $\hat {f}(\boldsymbol {x},\boldsymbol {\theta })$ produces observations which systematically deviate from reality. To remove such a bias, a model discrepancy term
$\hat {f}(\boldsymbol {x},\boldsymbol {\theta })$ produces observations which systematically deviate from reality. To remove such a bias, a model discrepancy term  $\hat {\delta }(\boldsymbol {x})$ can be added to the simulator (see Kennedy & O'Hagan Reference Kennedy and O'Hagan2001; Higdon et al. Reference Higdon, Kennedy, Cavendish, Cafeo and Ryne2004). In many practical applications, particularly in CFD and turbulent flow simulations where the computational cost can be excessively high, the restrictions of the computational budget only allows for a limited number of simulations. In any realization, the adopted values for the tuning parameters
$\hat {\delta }(\boldsymbol {x})$ can be added to the simulator (see Kennedy & O'Hagan Reference Kennedy and O'Hagan2001; Higdon et al. Reference Higdon, Kennedy, Cavendish, Cafeo and Ryne2004). In many practical applications, particularly in CFD and turbulent flow simulations where the computational cost can be excessively high, the restrictions of the computational budget only allows for a limited number of simulations. In any realization, the adopted values for the tuning parameters  $\boldsymbol {t}$ are not necessarily optimal and hence potentially lead to the outputs which are systematically different from the QoIs in reality. For the described calibration problem, the Kennedy & O'Hagan (Reference Kennedy and O'Hagan2001) model reads as
$\boldsymbol {t}$ are not necessarily optimal and hence potentially lead to the outputs which are systematically different from the QoIs in reality. For the described calibration problem, the Kennedy & O'Hagan (Reference Kennedy and O'Hagan2001) model reads as
 \begin{equation} \left.\begin{array}{ll@{}} y_i = \hat{f}(\boldsymbol{x}_i,\boldsymbol{\theta}) + \hat{\delta}(\boldsymbol{x}_i) +\varepsilon_i & i=1,2,\ldots,n_1 \\ y_{i} = \hat{f}(\boldsymbol{x}_i,\boldsymbol{t}_i) & i=1+n_1,2+n_1,\ldots,n_2+n_1 \end{array}\right\} , \end{equation}
\begin{equation} \left.\begin{array}{ll@{}} y_i = \hat{f}(\boldsymbol{x}_i,\boldsymbol{\theta}) + \hat{\delta}(\boldsymbol{x}_i) +\varepsilon_i & i=1,2,\ldots,n_1 \\ y_{i} = \hat{f}(\boldsymbol{x}_i,\boldsymbol{t}_i) & i=1+n_1,2+n_1,\ldots,n_2+n_1 \end{array}\right\} , \end{equation}
where  $\hat {\cdot }$ specifies a GP and
$\hat {\cdot }$ specifies a GP and  $n_2$ is the number of simulated data. Note that the samples
$n_2$ is the number of simulated data. Note that the samples  $\{\boldsymbol {x}_i\}_{i=1+n_1}^{n_2+n_1}$ are not necessarily the same as
$\{\boldsymbol {x}_i\}_{i=1+n_1}^{n_2+n_1}$ are not necessarily the same as  $\{\boldsymbol {x}_i\}_{i=1}^{n_1}$ at which the observations are made. The index
$\{\boldsymbol {x}_i\}_{i=1}^{n_1}$ at which the observations are made. The index  $i$ should be seen as a global index which implies that a different model is used for each of the two subranges of
$i$ should be seen as a global index which implies that a different model is used for each of the two subranges of  $i$. Given the
$i$. Given the  $n_1+n_2$ data, the posterior distribution for the calibration parameters
$n_1+n_2$ data, the posterior distribution for the calibration parameters  $\boldsymbol {\theta }$ along with that of the hyperparameters in the GPs,
$\boldsymbol {\theta }$ along with that of the hyperparameters in the GPs,  $\boldsymbol {\beta }$, is estimated. Further details are provided in the section below.
$\boldsymbol {\beta }$, is estimated. Further details are provided in the section below.
2.3. The hierarchical MFM with automatic calibration (HC-MFM)
Goh et al. (Reference Goh, Bingham, Holloway, Grosskopf, Kuranz and Rutter2013) extended the model (2.5) to an arbitrary number of fidelity levels which together form a modelling hierarchy for a physical process. As a main feature of the resulting MFM, each fidelity can, in general, have its own calibration parameters and also share some calibration parameters with other fidelities. The basics of the MFM comprising three fidelity levels are explained below, noting that adapting the formulation to any number of fidelities with different combinations of parameters is straightforward. We assume that the fidelity of the models decreases from  $M_1$ to
$M_1$ to  $M_3$, and in practice due to the budget limitations, the number of training data decreases with increasing the model fidelity. The HC-MFM for three fidelities reads as
$M_3$, and in practice due to the budget limitations, the number of training data decreases with increasing the model fidelity. The HC-MFM for three fidelities reads as
 \begin{align} \left.\begin{array}{ll@{}} y_{M_1}(\boldsymbol{x}_i) = {\hat{f}(\boldsymbol{x}_i,\boldsymbol{\theta}_3,\boldsymbol{\theta}_s)} + {\hat{g}(\boldsymbol{x}_i,\boldsymbol{\theta}_{2},\boldsymbol{\theta}_{s})}+ {\hat{\delta}(\boldsymbol{x}_i)} + \varepsilon_{1_i} & i=1,2,\ldots,n_1 \\ y_{M_2}(\boldsymbol{x}_{i}) = {\hat{f}(\boldsymbol{x}_i,\boldsymbol{\theta}_{3},\boldsymbol{t}_{s_i})} + {\hat{g}(x_i,\boldsymbol{t}_{2_i},\boldsymbol{t}_{s_i})}+ \varepsilon_{2_i} & {i=1+n_1,2+n_1, \ldots , n_2+n_1} \\ y_{M_3}(\boldsymbol{x}_{i}) = {\hat{f}(\boldsymbol{x}_i,\boldsymbol{t}_{3_i},\boldsymbol{t}_{s_i})}+ \varepsilon_{3_i} & i=1+n_1+n_2, \ldots , n_3+n_1+n_2 \end{array}\right\}, \end{align}
\begin{align} \left.\begin{array}{ll@{}} y_{M_1}(\boldsymbol{x}_i) = {\hat{f}(\boldsymbol{x}_i,\boldsymbol{\theta}_3,\boldsymbol{\theta}_s)} + {\hat{g}(\boldsymbol{x}_i,\boldsymbol{\theta}_{2},\boldsymbol{\theta}_{s})}+ {\hat{\delta}(\boldsymbol{x}_i)} + \varepsilon_{1_i} & i=1,2,\ldots,n_1 \\ y_{M_2}(\boldsymbol{x}_{i}) = {\hat{f}(\boldsymbol{x}_i,\boldsymbol{\theta}_{3},\boldsymbol{t}_{s_i})} + {\hat{g}(x_i,\boldsymbol{t}_{2_i},\boldsymbol{t}_{s_i})}+ \varepsilon_{2_i} & {i=1+n_1,2+n_1, \ldots , n_2+n_1} \\ y_{M_3}(\boldsymbol{x}_{i}) = {\hat{f}(\boldsymbol{x}_i,\boldsymbol{t}_{3_i},\boldsymbol{t}_{s_i})}+ \varepsilon_{3_i} & i=1+n_1+n_2, \ldots , n_3+n_1+n_2 \end{array}\right\}, \end{align}
where subscript  $s$ denotes the parameters which are shared between the models, whereas
$s$ denotes the parameters which are shared between the models, whereas  $\boldsymbol {t}_2$ and
$\boldsymbol {t}_2$ and  $\boldsymbol {t}_3$ are the calibration parameters specific to fidelities
$\boldsymbol {t}_3$ are the calibration parameters specific to fidelities  $M_2$ and
$M_2$ and  $M_3$, respectively. The noises are assumed to have Gaussian distributions with zero mean. At each fidelity level, the associated simulator is created by adding a model discrepancy term to the simulator describing the immediately lower fidelity. Concatenating all training data, an augmented vector
$M_3$, respectively. The noises are assumed to have Gaussian distributions with zero mean. At each fidelity level, the associated simulator is created by adding a model discrepancy term to the simulator describing the immediately lower fidelity. Concatenating all training data, an augmented vector  $\boldsymbol {Y}$ of size
$\boldsymbol {Y}$ of size  $n_1+n_2+n_3$ is obtained, for which the covariance matrix can be written in terms of the covariances of
$n_1+n_2+n_3$ is obtained, for which the covariance matrix can be written in terms of the covariances of  $\hat {f}({\cdot })$,
$\hat {f}({\cdot })$,  $\hat {g}({\cdot })$,
$\hat {g}({\cdot })$,  $\hat {\delta }({\cdot })$ and the observational noise:
$\hat {\delta }({\cdot })$ and the observational noise:
 \begin{align} \boldsymbol{\varSigma} &= {\boldsymbol{\varSigma}_{f}} +\begin{bmatrix} {\boldsymbol{\varSigma}_{g}} & \boldsymbol{0}_{(n_1+n_2)\times n_3} \\ \boldsymbol{0}_{n_3\times (n_1+n_2)} & \boldsymbol{0}_{n_3\times n_3} \\ \end{bmatrix} +\begin{bmatrix} {\boldsymbol{\varSigma}_\delta} & \boldsymbol{0}_{n_1\times (n_2+n_3)} \\ \boldsymbol{0}_{(n_2+n_3)\times n_1} & \boldsymbol{0}_{(n_2+n_3)\times (n_2+n_3)} \\ \end{bmatrix} \nonumber\\ & \quad +\begin{bmatrix} \boldsymbol{\varSigma}_{\varepsilon_1} & \boldsymbol{0}_{n_1\times n_2} & \boldsymbol{0}_{n_1\times n_3} \\ \boldsymbol{0}_{n_2\times n_1} & \boldsymbol{\varSigma}_{\varepsilon_2} & \boldsymbol{0}_{n_2\times n_3} \\ \boldsymbol{0}_{n_3\times n_1} & \boldsymbol{0}_{n_3\times n_2} & \boldsymbol{\varSigma}_{\varepsilon_3}\\ \end{bmatrix} . \end{align}
\begin{align} \boldsymbol{\varSigma} &= {\boldsymbol{\varSigma}_{f}} +\begin{bmatrix} {\boldsymbol{\varSigma}_{g}} & \boldsymbol{0}_{(n_1+n_2)\times n_3} \\ \boldsymbol{0}_{n_3\times (n_1+n_2)} & \boldsymbol{0}_{n_3\times n_3} \\ \end{bmatrix} +\begin{bmatrix} {\boldsymbol{\varSigma}_\delta} & \boldsymbol{0}_{n_1\times (n_2+n_3)} \\ \boldsymbol{0}_{(n_2+n_3)\times n_1} & \boldsymbol{0}_{(n_2+n_3)\times (n_2+n_3)} \\ \end{bmatrix} \nonumber\\ & \quad +\begin{bmatrix} \boldsymbol{\varSigma}_{\varepsilon_1} & \boldsymbol{0}_{n_1\times n_2} & \boldsymbol{0}_{n_1\times n_3} \\ \boldsymbol{0}_{n_2\times n_1} & \boldsymbol{\varSigma}_{\varepsilon_2} & \boldsymbol{0}_{n_2\times n_3} \\ \boldsymbol{0}_{n_3\times n_1} & \boldsymbol{0}_{n_3\times n_2} & \boldsymbol{\varSigma}_{\varepsilon_3}\\ \end{bmatrix} . \end{align}
Appropriate kernel functions should be chosen to express the structure of the covariances. Using samples  $i$ and
$i$ and  $j$ of the inputs and parameters, the associated element in the covariance matrix
$j$ of the inputs and parameters, the associated element in the covariance matrix  $\boldsymbol {\varSigma }_f$ will be obtained from
$\boldsymbol {\varSigma }_f$ will be obtained from
 \begin{equation} \boldsymbol{\varSigma}_{f_{ij}}=\text{cov}(\boldsymbol{x}_i,\boldsymbol{t}_{3_i}, \boldsymbol{t}_{s_i},\boldsymbol{x}_j,\boldsymbol{t}_{3_j},\boldsymbol{t}_{s_j}) =\lambda_f^2 k(\bar{d}_{f_{ij}}) , \end{equation}
\begin{equation} \boldsymbol{\varSigma}_{f_{ij}}=\text{cov}(\boldsymbol{x}_i,\boldsymbol{t}_{3_i}, \boldsymbol{t}_{s_i},\boldsymbol{x}_j,\boldsymbol{t}_{3_j},\boldsymbol{t}_{s_j}) =\lambda_f^2 k(\bar{d}_{f_{ij}}) , \end{equation}
where  $\lambda _f$ is a hyperparameter and
$\lambda _f$ is a hyperparameter and  $\bar {d}_{f_{ij}}$ is the scaled Euclidean distance between two samples
$\bar {d}_{f_{ij}}$ is the scaled Euclidean distance between two samples  $i$ and
$i$ and  $j$ over the space of
$j$ over the space of  $(\boldsymbol {x},\boldsymbol {t}_3,\boldsymbol {t}_s)$
$(\boldsymbol {x},\boldsymbol {t}_3,\boldsymbol {t}_s)$
 \begin{align} \bar{d}^2_{f_{ij}} &= \bar{d}^2(\boldsymbol{x}_i,\boldsymbol{x}_j) + \bar{d}^2(\boldsymbol{t}_{3_i},\boldsymbol{t}_{3_j})+ \bar{d}^2(\boldsymbol{t}_{s_i},\boldsymbol{t}_{s_j}) \end{align}
\begin{align} \bar{d}^2_{f_{ij}} &= \bar{d}^2(\boldsymbol{x}_i,\boldsymbol{x}_j) + \bar{d}^2(\boldsymbol{t}_{3_i},\boldsymbol{t}_{3_j})+ \bar{d}^2(\boldsymbol{t}_{s_i},\boldsymbol{t}_{s_j}) \end{align} \begin{align} &=\sum_{l=1}^{p_{\boldsymbol{x}}} \frac{(x_{l_i}-x_{l_j})^2}{\ell^2_{f_{x_l}}} + \sum_{l=1}^{p_{{\boldsymbol{t}}_3}} \frac{(t_{3_{l_i}}-t_{3_{l_j}})^2}{\ell^2_{f_{{t_3}_l}}} + \sum_{l=1}^{p_{{\boldsymbol{t}}_s}} \frac{(t_{s_{l_i}}-t_{s_{l_j}})^2}{\ell^2_{f_{{t_s}_l}}}. \end{align}
\begin{align} &=\sum_{l=1}^{p_{\boldsymbol{x}}} \frac{(x_{l_i}-x_{l_j})^2}{\ell^2_{f_{x_l}}} + \sum_{l=1}^{p_{{\boldsymbol{t}}_3}} \frac{(t_{3_{l_i}}-t_{3_{l_j}})^2}{\ell^2_{f_{{t_3}_l}}} + \sum_{l=1}^{p_{{\boldsymbol{t}}_s}} \frac{(t_{s_{l_i}}-t_{s_{l_j}})^2}{\ell^2_{f_{{t_s}_l}}}. \end{align}
Here,  $p_{\boldsymbol {x}}, p_{{\boldsymbol {t}}_3}$ and
$p_{\boldsymbol {x}}, p_{{\boldsymbol {t}}_3}$ and  $p_{{\boldsymbol {t}}_s}$ specify the dimensions of
$p_{{\boldsymbol {t}}_s}$ specify the dimensions of  $\boldsymbol {x}, \boldsymbol {t}_3$ and
$\boldsymbol {x}, \boldsymbol {t}_3$ and  $\boldsymbol {t}_s$, respectively. Correspondingly, the length scale over the
$\boldsymbol {t}_s$, respectively. Correspondingly, the length scale over the  $l$th dimension of each of these spaces is represented by
$l$th dimension of each of these spaces is represented by  $\ell _{f_{x_l}}, \ell _{f_{{t_3}_l}}$ and
$\ell _{f_{x_l}}, \ell _{f_{{t_3}_l}}$ and  $\ell _{f_{{t_s}_l}}$, respectively. These length scales are among the hyperparameters
$\ell _{f_{{t_s}_l}}$, respectively. These length scales are among the hyperparameters  $\boldsymbol {\beta }$ to be learned when constructing the HC-MFM. There are various options for modelling the covariance kernel function
$\boldsymbol {\beta }$ to be learned when constructing the HC-MFM. There are various options for modelling the covariance kernel function  $k({\cdot })$, see e.g. Rasmussen & Williams (Reference Rasmussen and Williams2005) and Gramacy (Reference Gramacy2020), among which the exponentiated quadratic and Matern-5/2 (Matern Reference Matern1986) functions are used in the examples in § 3. These two functions respectively read as
$k({\cdot })$, see e.g. Rasmussen & Williams (Reference Rasmussen and Williams2005) and Gramacy (Reference Gramacy2020), among which the exponentiated quadratic and Matern-5/2 (Matern Reference Matern1986) functions are used in the examples in § 3. These two functions respectively read as
 \begin{equation} k(\bar{d}_{f_{ij}}) = \exp(-0.5 \bar{d}^2_{f_{ij}}) \end{equation}
\begin{equation} k(\bar{d}_{f_{ij}}) = \exp(-0.5 \bar{d}^2_{f_{ij}}) \end{equation}and
 \begin{equation} k(\bar{d}_{f_{ij}}) = [ 1+\sqrt{5} \bar{d}_{f_{ij}} +\tfrac{5}{3}\bar{d}^2_{f_{ij}} ] \exp(-\sqrt{5} \bar{d}_{f_{ij}}). \end{equation}
\begin{equation} k(\bar{d}_{f_{ij}}) = [ 1+\sqrt{5} \bar{d}_{f_{ij}} +\tfrac{5}{3}\bar{d}^2_{f_{ij}} ] \exp(-\sqrt{5} \bar{d}_{f_{ij}}). \end{equation}
Similar expressions can be derived for  $\boldsymbol {\varSigma }_{g_{ij}} = k_{g}(\boldsymbol {x}_i,\boldsymbol {t}_{2_i},\boldsymbol {t}_{s_i},\boldsymbol {x}_j,\boldsymbol {t}_{2_j},\boldsymbol {t}_{s_j})$ and
$\boldsymbol {\varSigma }_{g_{ij}} = k_{g}(\boldsymbol {x}_i,\boldsymbol {t}_{2_i},\boldsymbol {t}_{s_i},\boldsymbol {x}_j,\boldsymbol {t}_{2_j},\boldsymbol {t}_{s_j})$ and  ${\boldsymbol {\varSigma }_{\delta _{ij}} =k_\delta (\boldsymbol {x}_i,\boldsymbol {x}_j)}$ appearing in (2.7). This leads to introducing new hyperparameters associated with the GPs. Note that, given how the training vector
${\boldsymbol {\varSigma }_{\delta _{ij}} =k_\delta (\boldsymbol {x}_i,\boldsymbol {x}_j)}$ appearing in (2.7). This leads to introducing new hyperparameters associated with the GPs. Note that, given how the training vector  $\boldsymbol {Y}$ and associated inputs are assembled, correct combinations of training data for the inputs and parameters will be used in the kernels. The unknown parameters to estimate include calibration parameters in different models,
$\boldsymbol {Y}$ and associated inputs are assembled, correct combinations of training data for the inputs and parameters will be used in the kernels. The unknown parameters to estimate include calibration parameters in different models,  $\boldsymbol {\theta }$, and hyperparameters
$\boldsymbol {\theta }$, and hyperparameters  $\boldsymbol {\beta }$ appearing in the GPs. Following the Bayes rule, the posterior distribution of these parameters given the training data
$\boldsymbol {\beta }$ appearing in the GPs. Following the Bayes rule, the posterior distribution of these parameters given the training data  $\boldsymbol {Y}$ can be inferred from (Kennedy & O'Hagan Reference Kennedy and O'Hagan2001; Higdon et al. Reference Higdon, Kennedy, Cavendish, Cafeo and Ryne2004; Goh et al. Reference Goh, Bingham, Holloway, Grosskopf, Kuranz and Rutter2013)
$\boldsymbol {Y}$ can be inferred from (Kennedy & O'Hagan Reference Kennedy and O'Hagan2001; Higdon et al. Reference Higdon, Kennedy, Cavendish, Cafeo and Ryne2004; Goh et al. Reference Goh, Bingham, Holloway, Grosskopf, Kuranz and Rutter2013)
 \begin{equation} {\rm \pi}(\boldsymbol{\theta},\boldsymbol{\beta}|\boldsymbol{Y}) \propto {\rm \pi}(\boldsymbol{Y}|\boldsymbol{\theta},\boldsymbol{\beta}) {\rm \pi}_0(\boldsymbol{\theta}) {\rm \pi}_0(\boldsymbol{\beta}) , \end{equation}
\begin{equation} {\rm \pi}(\boldsymbol{\theta},\boldsymbol{\beta}|\boldsymbol{Y}) \propto {\rm \pi}(\boldsymbol{Y}|\boldsymbol{\theta},\boldsymbol{\beta}) {\rm \pi}_0(\boldsymbol{\theta}) {\rm \pi}_0(\boldsymbol{\beta}) , \end{equation}
where  ${\rm \pi} (\boldsymbol {Y}|\boldsymbol {\theta },\boldsymbol {\beta })$ specifies the likelihood function and
${\rm \pi} (\boldsymbol {Y}|\boldsymbol {\theta },\boldsymbol {\beta })$ specifies the likelihood function and  ${\rm \pi} _0({\cdot })$ represents a prior distribution. Note that all priors are assumed to be independent. For all GPs in § 3, the prior distribution for
${\rm \pi} _0({\cdot })$ represents a prior distribution. Note that all priors are assumed to be independent. For all GPs in § 3, the prior distribution for  $\lambda$ appearing in the covariance matrices such as (2.8) is taken to be half-Cauchy whereas the length scales
$\lambda$ appearing in the covariance matrices such as (2.8) is taken to be half-Cauchy whereas the length scales  $\ell$ in (2.11) and (2.12) are assumed to have gamma distributions. The exact definition of the priors will be provided later for each case in § 3, and table 2 in Appendix B summarizes the formulation of the standard distributions used as priors. The standard deviations of the noises are assumed to be the same for which a half-Cauchy prior is adopted. For the calibration parameters
$\ell$ in (2.11) and (2.12) are assumed to have gamma distributions. The exact definition of the priors will be provided later for each case in § 3, and table 2 in Appendix B summarizes the formulation of the standard distributions used as priors. The standard deviations of the noises are assumed to be the same for which a half-Cauchy prior is adopted. For the calibration parameters  $\boldsymbol {\theta }$, Gaussian or uniform priors are considered. In some cases, we may consider a constant mean function for the GPs, where a Gaussian distribution is used as the prior. Due to this, the predictions of a trained MFM when it is used to extrapolate in
$\boldsymbol {\theta }$, Gaussian or uniform priors are considered. In some cases, we may consider a constant mean function for the GPs, where a Gaussian distribution is used as the prior. Due to this, the predictions of a trained MFM when it is used to extrapolate in  $\boldsymbol {x}$ (outside of the range of training samples) should be used with caution. To avoid potential inaccuracies, in general, more elaborate mean functions can be used when constructing the HC-MFMs (this, however, is not the subject of the present study). Further details about the choice of the kernels and priors for the parameters/hyperparameters as well as the use of the HC-MFM for extrapolation can be found in Appendix A.
$\boldsymbol {x}$ (outside of the range of training samples) should be used with caution. To avoid potential inaccuracies, in general, more elaborate mean functions can be used when constructing the HC-MFMs (this, however, is not the subject of the present study). Further details about the choice of the kernels and priors for the parameters/hyperparameters as well as the use of the HC-MFM for extrapolation can be found in Appendix A.
Given the training data  $\boldsymbol {Y}$, a Markov chain Monte Carlo (MCMC) technique can be used to draw samples from the posterior distributions of
$\boldsymbol {Y}$, a Markov chain Monte Carlo (MCMC) technique can be used to draw samples from the posterior distributions of  $\boldsymbol {\theta }$ and
$\boldsymbol {\theta }$ and  $\boldsymbol {\beta }$, and hence construct a HC-MFM. In the present study, the described HC-MFM (2.6) has been implemented in Python using the PyMC3 (Salvatier, Wiecki & Fonnesbeck Reference Salvatier, Wiecki and Fonnesbeck2016) package with the no-U-turn sampler (NUTS) MCMC sampling approach (Hoffman & Gelman Reference Hoffman and Gelman2014). As it will be shown in § 3.6, the MCMC sampling method may lead to more accurate results compared with the point estimators.
$\boldsymbol {\beta }$, and hence construct a HC-MFM. In the present study, the described HC-MFM (2.6) has been implemented in Python using the PyMC3 (Salvatier, Wiecki & Fonnesbeck Reference Salvatier, Wiecki and Fonnesbeck2016) package with the no-U-turn sampler (NUTS) MCMC sampling approach (Hoffman & Gelman Reference Hoffman and Gelman2014). As it will be shown in § 3.6, the MCMC sampling method may lead to more accurate results compared with the point estimators.
After being constructed, an HC-MFM can be used for predicting the QoI  $y$ for any new sample taken from the space of inputs
$y$ for any new sample taken from the space of inputs  $\boldsymbol {x}$. The accuracy of the predicted QoIs will be assessed by measuring their deviation from the validation data of the highest fidelity
$\boldsymbol {x}$. The accuracy of the predicted QoIs will be assessed by measuring their deviation from the validation data of the highest fidelity  ${M_1}$. As detailed in Goh et al. (Reference Goh, Bingham, Holloway, Grosskopf, Kuranz and Rutter2013), the joint distribution of the training
${M_1}$. As detailed in Goh et al. (Reference Goh, Bingham, Holloway, Grosskopf, Kuranz and Rutter2013), the joint distribution of the training  $\boldsymbol {Y}$ and new
$\boldsymbol {Y}$ and new  $y^*$ (associated with a test sample
$y^*$ (associated with a test sample  $\boldsymbol {x}^*$) conditioned on
$\boldsymbol {x}^*$) conditioned on  $\boldsymbol {\theta },\boldsymbol {\beta }$ will have a multivariate normal distribution with a covariance matrix of the same structure as
$\boldsymbol {\theta },\boldsymbol {\beta }$ will have a multivariate normal distribution with a covariance matrix of the same structure as  $\boldsymbol {\varSigma }$ in (2.7). For any joint sample drawn from the posterior distribution of
$\boldsymbol {\varSigma }$ in (2.7). For any joint sample drawn from the posterior distribution of  ${\rm \pi} (\boldsymbol {\theta },\boldsymbol {\beta }|\boldsymbol {Y})$, a sample prediction for
${\rm \pi} (\boldsymbol {\theta },\boldsymbol {\beta }|\boldsymbol {Y})$, a sample prediction for  $y^*$ is made. Repeating this procedure for a large number of times, valid estimations for the posterior of the predictions
$y^*$ is made. Repeating this procedure for a large number of times, valid estimations for the posterior of the predictions  $y^*$ can be achieved. Therefore, estimating the confidence in the predictions is straightforward. Note that at this stage, various UQ analyses can be performed using the HC-MFM as a surrogate of the physical process over
$y^*$ can be achieved. Therefore, estimating the confidence in the predictions is straightforward. Note that at this stage, various UQ analyses can be performed using the HC-MFM as a surrogate of the physical process over  $\boldsymbol {x}$.
$\boldsymbol {x}$.
3. Results and discussion
Four examples are considered to which the HC-MFM described in the previous section is applied. The first example in § 3.1 is used to validate the implementation of the MFM, and the next three examples are relevant to fundamental and engineering analysis of wall-bounded turbulent flows.
3.1. An illustrative example
Consider the following analytical model taken from Forrester, Sóbester & Keane (Reference Forrester, Sóbester and Keane2007) to generate HF and LF samples of the QoI  $y$ for input
$y$ for input  $x\in [0,1]$:
$x\in [0,1]$:
 \begin{equation} \left.\begin{array}{c} y_{H}(x)=(\theta x-2)^2 \sin (2\theta x-4) \\ y_{L}(x)=y_{H}(x) + B(x-0.5)-C \end{array}\right\} . \end{equation}
\begin{equation} \left.\begin{array}{c} y_{H}(x)=(\theta x-2)^2 \sin (2\theta x-4) \\ y_{L}(x)=y_{H}(x) + B(x-0.5)-C \end{array}\right\} . \end{equation}
In Forrester et al. (Reference Forrester, Sóbester and Keane2007),  $\theta$ is taken to be fixed and equal to
$\theta$ is taken to be fixed and equal to  $6$, but here it is treated as an uncertain calibration parameter that is to be estimated during the construction of the MFM. Note that the notations of the general model (2.5) can be adopted for (3.1). For simulator
$6$, but here it is treated as an uncertain calibration parameter that is to be estimated during the construction of the MFM. Note that the notations of the general model (2.5) can be adopted for (3.1). For simulator  $\hat {f}(x,t)$ and model discrepancy
$\hat {f}(x,t)$ and model discrepancy  $\hat {\delta }(x)$ the covariance matrix in (2.8) is used with the exponentiated quadratic kernel (2.11). The following prior distributions are considered:
$\hat {\delta }(x)$ the covariance matrix in (2.8) is used with the exponentiated quadratic kernel (2.11). The following prior distributions are considered:  $\lambda _f, \lambda _\delta \sim \mathcal {HC}(\alpha =5)$,
$\lambda _f, \lambda _\delta \sim \mathcal {HC}(\alpha =5)$,  $\ell _{f_x}, \ell _{f_t}, \ell _{\delta _x} \sim \varGamma (\alpha =1,\beta =5)$,
$\ell _{f_x}, \ell _{f_t}, \ell _{\delta _x} \sim \varGamma (\alpha =1,\beta =5)$,  $\varepsilon \sim \mathcal {N}(0,\sigma )$ with
$\varepsilon \sim \mathcal {N}(0,\sigma )$ with  $\sigma \sim \mathcal {HC}(\alpha =5)$ and
$\sigma \sim \mathcal {HC}(\alpha =5)$ and  $\theta \sim \mathcal {U}[5.8,6.2]$. Here,
$\theta \sim \mathcal {U}[5.8,6.2]$. Here,  $\mathcal {HC}, \varGamma, \mathcal {N}$ and
$\mathcal {HC}, \varGamma, \mathcal {N}$ and  $\mathcal {U}$ denote the half-Cauchy, gamma, Gaussian, and uniform distributions, respectively, see table 2. The HF training samples are taken at
$\mathcal {U}$ denote the half-Cauchy, gamma, Gaussian, and uniform distributions, respectively, see table 2. The HF training samples are taken at  $x=\{0,0.4,0.6,1\}$, therefore,
$x=\{0,0.4,0.6,1\}$, therefore,  $n_H=4$ is fixed. To investigate the effect of
$n_H=4$ is fixed. To investigate the effect of  $n_L$, three sets of LF samples of size
$n_L$, three sets of LF samples of size  $10, 15$ and
$10, 15$ and  $20$ are considered which are generated by Latin hypercube sampling from the admissible space
$20$ are considered which are generated by Latin hypercube sampling from the admissible space  $[0,1]\times [5.8,6.2]$ corresponding to
$[0,1]\times [5.8,6.2]$ corresponding to  $x$ and
$x$ and  $t$ (uncalibrated instance of
$t$ (uncalibrated instance of  $\theta$), respectively.
$\theta$), respectively.
Using the data, the HC-MFM (2.6) for problem (3.1) is constructed. The first row in figure 2 shows the predicted  $y$ with the associated
$y$ with the associated  $95\,\%$ confidence interval (CI) along with the training data and reference true data generated with
$95\,\%$ confidence interval (CI) along with the training data and reference true data generated with  $\theta =6$. For all
$\theta =6$. For all  $n_L$, the predicted
$n_L$, the predicted  $y$ is closer to HF data than the LF data, however, for
$y$ is closer to HF data than the LF data, however, for  $n_L=15$ and
$n_L=15$ and  $20$, the agreement between the mean of the predicted
$20$, the agreement between the mean of the predicted  $y$ and the true data is significantly improved. A better validation can be made via the plots in the second row of figure 2, where the predicted
$y$ and the true data is significantly improved. A better validation can be made via the plots in the second row of figure 2, where the predicted  $y$ and true values of
$y$ and true values of  $y_H$ at
$y_H$ at  $50$ uniformly spaced test samples for
$50$ uniformly spaced test samples for  $x\in [0,1]$ are plotted. Clearly, increasing the number of the LF samples while keeping
$x\in [0,1]$ are plotted. Clearly, increasing the number of the LF samples while keeping  $n_H=4$ fixed improves the predictions and reduces the uncertainty. In the third row of figure 2, the posterior densities of
$n_H=4$ fixed improves the predictions and reduces the uncertainty. In the third row of figure 2, the posterior densities of  $\theta$ are presented. In all cases, a uniform (non-informative) prior distribution over
$\theta$ are presented. In all cases, a uniform (non-informative) prior distribution over  $[5.8,6.2]$ was considered for
$[5.8,6.2]$ was considered for  $\theta$. Only for
$\theta$. Only for  $n_L=20$, the resulting posterior density of
$n_L=20$, the resulting posterior density of  $\theta$ is high near the true value
$\theta$ is high near the true value  $6$. Therefore, it is confirmed that, as explained by Goh et al. (Reference Goh, Bingham, Holloway, Grosskopf, Kuranz and Rutter2013), the main capability of the HC-MFM (2.6) is in making accurate predictions for
$6$. Therefore, it is confirmed that, as explained by Goh et al. (Reference Goh, Bingham, Holloway, Grosskopf, Kuranz and Rutter2013), the main capability of the HC-MFM (2.6) is in making accurate predictions for  $y$ and only if a sufficient number of training data are available, accurate distributions for the calibration parameters are also obtained. This is shown here by fixing
$y$ and only if a sufficient number of training data are available, accurate distributions for the calibration parameters are also obtained. This is shown here by fixing  $n_H$ and increasing
$n_H$ and increasing  $n_L$, which is favourable in practice. It is also noteworthy that if
$n_L$, which is favourable in practice. It is also noteworthy that if  $\theta$ was known and hence treated as a fixed parameter, then even with
$\theta$ was known and hence treated as a fixed parameter, then even with  $n_L=10$ very accurate predictions for
$n_L=10$ very accurate predictions for  $y$ could be already achieved (not shown here).
$y$ could be already achieved (not shown here).

Figure 2. (a–c) Predicted QoI  $y$ by HC-MFM (2.6) along with the training and true data, (d–f) predicted
$y$ by HC-MFM (2.6) along with the training and true data, (d–f) predicted  $y$ vs true observations at
$y$ vs true observations at  $50$ test samples of
$50$ test samples of  $x\in [0,1]$ with error bars representing
$x\in [0,1]$ with error bars representing  $95\,\%$ CI, (g–i) posterior probability density function (PDF) of
$95\,\%$ CI, (g–i) posterior probability density function (PDF) of  $\theta$ based on
$\theta$ based on  $10^4$ MCMC samples. The
$10^4$ MCMC samples. The  $y_H$ and
$y_H$ and  $y_L$ training data are generated from (3.1) using
$y_L$ training data are generated from (3.1) using  $B=C=10$. The training data include
$B=C=10$. The training data include  $4$ HF samples combined with (left column)
$4$ HF samples combined with (left column)  $10$, (middle column)
$10$, (middle column)  $15$ and (right column)
$15$ and (right column)  $20$ LF samples. The true data are generated by (3.1) using
$20$ LF samples. The true data are generated by (3.1) using  $\theta =6$.
$\theta =6$.
It also should be noted that the mean of the posterior distribution of  $\sigma$, the noise standard deviation, is found to be negligible, as expected. This is in fact the case for all other examples in this section.
$\sigma$, the noise standard deviation, is found to be negligible, as expected. This is in fact the case for all other examples in this section.
3.2. Turbulent channel flow
Turbulent channel flow is one of the most canonical wall-bounded turbulent flows. The flow develops between two parallel flat walls which are apart by the distance  $2\delta$, and the flow is periodic in the streamwise and spanwise directions. Channel flow is fully defined by a Reynolds number, for instance the bulk Reynolds number
$2\delta$, and the flow is periodic in the streamwise and spanwise directions. Channel flow is fully defined by a Reynolds number, for instance the bulk Reynolds number  $Re_b=U_b\delta /\nu$, where
$Re_b=U_b\delta /\nu$, where  $U_b$ and
$U_b$ and  $\nu$ specify the streamwise bulk velocity and kinematic viscosity, respectively. Among different possible QoIs, here we only focus on the friction velocity
$\nu$ specify the streamwise bulk velocity and kinematic viscosity, respectively. Among different possible QoIs, here we only focus on the friction velocity  $\langle u_\tau \rangle$, as a function of Reynolds number. This quantity is defined as
$\langle u_\tau \rangle$, as a function of Reynolds number. This quantity is defined as  $\sqrt {\langle \tau _w \rangle /\rho }$, where
$\sqrt {\langle \tau _w \rangle /\rho }$, where  $\tau _w$ and
$\tau _w$ and  $\rho$ are the magnitude of the wall-shear stress and fluid density, respectively, and
$\rho$ are the magnitude of the wall-shear stress and fluid density, respectively, and  $\langle {\cdot } \rangle$ represents averaging over time and the periodic directions. Three fidelity levels are considered: DNS (
$\langle {\cdot } \rangle$ represents averaging over time and the periodic directions. Three fidelity levels are considered: DNS ( $M_1$), wall-resolved LES (WRLES) (
$M_1$), wall-resolved LES (WRLES) ( $M_2$) and a reduced-order algebraic model (
$M_2$) and a reduced-order algebraic model ( $M_3$), where the fidelity reduces from the former to the latter. We use the DNS data of Iwamoto, Suzuki & Kasagi (Reference Iwamoto, Suzuki and Kasagi2002), Lee & Moser (Reference Lee and Moser2015) and Yamamoto & Tsuji (Reference Yamamoto and Tsuji2018).
$M_3$), where the fidelity reduces from the former to the latter. We use the DNS data of Iwamoto, Suzuki & Kasagi (Reference Iwamoto, Suzuki and Kasagi2002), Lee & Moser (Reference Lee and Moser2015) and Yamamoto & Tsuji (Reference Yamamoto and Tsuji2018).
The WRLES of channel flow have been performed at different Reynolds numbers without any explicit subgrid-scale model using OpenFOAM (Weller et al. Reference Weller, Tabor, Jasak and Fureby1998), which is an open-source finite-volume flow solver. Linear interpolation is used for the evaluation of face fluxes, and a second-order backward-differencing scheme is used for time integration. The pressure-implicit with splitting of operators (PISO) algorithm is used for pressure–velocity coupling. For further details on the simulation set-up, see Rezaeiravesh & Liefvendahl (Reference Rezaeiravesh and Liefvendahl2018). The results in that paper show that for a fixed resolution in the wall-normal direction, variation of the grid resolutions in the wall-parallel directions could significantly impact the accuracy of the flow QoIs. Therefore, in the context of the HC-MFM, the calibration parameters for WRLES are taken to be  ${{\rm \Delta} x^+}$ and
${{\rm \Delta} x^+}$ and  ${{\rm \Delta} z^+}$, which are the cell dimensions in the streamwise and spanwise directions, respectively, expressed in wall units (
${{\rm \Delta} z^+}$, which are the cell dimensions in the streamwise and spanwise directions, respectively, expressed in wall units ( ${{\rm \Delta} x^+}={\rm \Delta} x u^\circ _\tau /\nu$ where
${{\rm \Delta} x^+}={\rm \Delta} x u^\circ _\tau /\nu$ where  $u^\circ _\tau$ is the reference
$u^\circ _\tau$ is the reference  $u_\tau$ from DNS).
$u_\tau$ from DNS).
At the lowest fidelity, the following reduced-order algebraic model is considered which is derived by averaging the streamwise momentum equation for the channel flow in the periodic directions and time:
 \begin{equation} \langle u_\tau \rangle^2/U_b^2=\frac{1}{Re_b} \frac{\mbox{d}}{\mbox{d} \eta} \left( (1+\zeta(\eta)) \frac{\mbox{d}\langle u \rangle/U_b}{\mbox{d} \eta} \right) , \end{equation}
\begin{equation} \langle u_\tau \rangle^2/U_b^2=\frac{1}{Re_b} \frac{\mbox{d}}{\mbox{d} \eta} \left( (1+\zeta(\eta)) \frac{\mbox{d}\langle u \rangle/U_b}{\mbox{d} \eta} \right) , \end{equation}
where  $\eta$ is the distance from the wall normalized by the channel half-height
$\eta$ is the distance from the wall normalized by the channel half-height  $\delta$, and
$\delta$, and  $\zeta (\eta )$ is the normalized eddy viscosity
$\zeta (\eta )$ is the normalized eddy viscosity  $\nu _t$, i.e.
$\nu _t$, i.e.  $\zeta (\eta )=\nu _t(\eta )/\nu$. Reynolds & Tiederman (Reference Reynolds and Tiederman1967) proposed the following closed form for
$\zeta (\eta )=\nu _t(\eta )/\nu$. Reynolds & Tiederman (Reference Reynolds and Tiederman1967) proposed the following closed form for  $\zeta (\eta )$:
$\zeta (\eta )$:
 \begin{align} \zeta(\eta) =\frac{1}{2} \left[1+\frac{{\kappa}^2 Re^2_\tau}{9}(1- (\eta-1)^2)^2 (1+2(\eta-1)^2)^2 \left(1-\exp\left(\frac{-\eta Re_\tau}{A^+}\right) \right)^2 \right]^{1/2} \!\!-\frac{1}{2} , \end{align}
\begin{align} \zeta(\eta) =\frac{1}{2} \left[1+\frac{{\kappa}^2 Re^2_\tau}{9}(1- (\eta-1)^2)^2 (1+2(\eta-1)^2)^2 \left(1-\exp\left(\frac{-\eta Re_\tau}{A^+}\right) \right)^2 \right]^{1/2} \!\!-\frac{1}{2} , \end{align}
where  ${Re}_\tau =\langle u_\tau \rangle \delta /\nu$ is the friction-based Reynolds number, and
${Re}_\tau =\langle u_\tau \rangle \delta /\nu$ is the friction-based Reynolds number, and  $\kappa$ and
$\kappa$ and  $A^+$ are two modelling parameters. At any
$A^+$ are two modelling parameters. At any  ${Re}_b$ (and given value of
${Re}_b$ (and given value of  $\kappa$ and
$\kappa$ and  $A^+$), (3.2) is integrated over
$A^+$), (3.2) is integrated over  $\eta \in [0,1]$ and is iteratively solved using (3.3) to estimate
$\eta \in [0,1]$ and is iteratively solved using (3.3) to estimate  $\langle u_\tau \rangle$. Expressing the channel flow example in the terminology of MFM (2.6),
$\langle u_\tau \rangle$. Expressing the channel flow example in the terminology of MFM (2.6),  $\langle u_\tau \rangle /U_b$ is the QoI
$\langle u_\tau \rangle /U_b$ is the QoI  $y$,
$y$,  $x=Re_b$,
$x=Re_b$,  $\boldsymbol {t}_3=(\kappa,A^+)$ and
$\boldsymbol {t}_3=(\kappa,A^+)$ and  $\boldsymbol {t}_2=({{\rm \Delta} x^+},{{\rm \Delta} z^+})$. The training data set consists of the following databases. For DNS,
$\boldsymbol {t}_2=({{\rm \Delta} x^+},{{\rm \Delta} z^+})$. The training data set consists of the following databases. For DNS,  $\langle u_\tau \rangle$ is taken from Iwamoto et al. (Reference Iwamoto, Suzuki and Kasagi2002), Lee & Moser (Reference Lee and Moser2015) and Yamamoto & Tsuji (Reference Yamamoto and Tsuji2018) at
$\langle u_\tau \rangle$ is taken from Iwamoto et al. (Reference Iwamoto, Suzuki and Kasagi2002), Lee & Moser (Reference Lee and Moser2015) and Yamamoto & Tsuji (Reference Yamamoto and Tsuji2018) at  $Re_b=5020$,
$Re_b=5020$,  $6962$,
$6962$,  $10\ 000$,
$10\ 000$,  $20\ 000$,
$20\ 000$,  $125\ 000$ and
$125\ 000$ and  $200\ 400$. In total,
$200\ 400$. In total,  $16$ WRLES
$16$ WRLES  $\langle u_\tau \rangle$ samples are obtained from a design of experiment based on the prior distributions
$\langle u_\tau \rangle$ samples are obtained from a design of experiment based on the prior distributions  ${{\rm \Delta} x^+}\sim \mathcal {U}[15,85]$ and
${{\rm \Delta} x^+}\sim \mathcal {U}[15,85]$ and  ${{\rm \Delta} z^+}\sim \mathcal {U}[9.5,22]$ at
${{\rm \Delta} z^+}\sim \mathcal {U}[9.5,22]$ at  ${Re}_b=5020,6962,10\ 000$, and
${Re}_b=5020,6962,10\ 000$, and  $20\ 000$. Here, we do not consider the observational uncertainty in
$20\ 000$. Here, we do not consider the observational uncertainty in  $\langle u_\tau \rangle$ which could, for instance, be due to finite time averaging in DNS and WRLES, but in general the HC-MFM could take such information into account. The reduced-order model (3.2) which is computationally cheap is run for
$\langle u_\tau \rangle$ which could, for instance, be due to finite time averaging in DNS and WRLES, but in general the HC-MFM could take such information into account. The reduced-order model (3.2) which is computationally cheap is run for  $10$ values of
$10$ values of  ${Re}_b$ in range
${Re}_b$ in range  $[2000,200\ 200]$. For each
$[2000,200\ 200]$. For each  ${Re}_b, 9$ joint samples of
${Re}_b, 9$ joint samples of  $(\kappa,A^+)$ are generated assuming
$(\kappa,A^+)$ are generated assuming  $\kappa \sim \mathcal {U}[0.36,0.43]$ and
$\kappa \sim \mathcal {U}[0.36,0.43]$ and  $A^+\sim \mathcal {U}[26.5,29]$ (note that
$A^+\sim \mathcal {U}[26.5,29]$ (note that  $\kappa$ is the von Kármán coefficient). For all the GPs in the MFM (2.6), the exponentiated quadratic covariance function (2.11) is used. The prior distribution of the hyperparameters are set as the following:
$\kappa$ is the von Kármán coefficient). For all the GPs in the MFM (2.6), the exponentiated quadratic covariance function (2.11) is used. The prior distribution of the hyperparameters are set as the following:  $\lambda _f, \lambda _g \sim \mathcal {HC}(\alpha =5)$,
$\lambda _f, \lambda _g \sim \mathcal {HC}(\alpha =5)$,  $\lambda _{\delta } \sim \mathcal {HC}(\alpha =3)$,
$\lambda _{\delta } \sim \mathcal {HC}(\alpha =3)$,  $\ell _{f_x}, \ell _{f_{t_3}},\ell _{g_x}, \ell _{g_{t_2}}, \ell _{\delta _x} \sim \varGamma (\alpha =1,\beta =5)$ and the noise standard deviation
$\ell _{f_x}, \ell _{f_{t_3}},\ell _{g_x}, \ell _{g_{t_2}}, \ell _{\delta _x} \sim \varGamma (\alpha =1,\beta =5)$ and the noise standard deviation  $\sigma \sim \mathcal {HC}(\alpha =5)$ (assumed to be the same for all fidelities).
$\sigma \sim \mathcal {HC}(\alpha =5)$ (assumed to be the same for all fidelities).
Using the described training data in the HC-MFM (2.6) and running the MCMC chain for  $7000$ samples, after an initial
$7000$ samples, after an initial  $2000$ samples discarded due to burn in, the model is constructed. This means extra MCMC samples are generated from which a sufficiently large number of initial samples is discarded to avoid any bias introduced by the initialization. According to figure 3(a), the predicted mean of
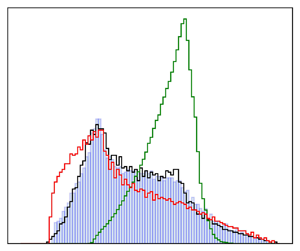
$2000$ samples discarded due to burn in, the model is constructed. This means extra MCMC samples are generated from which a sufficiently large number of initial samples is discarded to avoid any bias introduced by the initialization. According to figure 3(a), the predicted mean of  $\langle u_\tau \rangle /U_b$ follows the trend of the DNS data. This approximately holds even at high Reynolds numbers, where there is a large systematic error in the algebraic model and no WRLES data are available. As expected, in this range due to scarcity of the DNS data, the uncertainty in the predictions is high. The plot in figure 3(b) shows the joint posterior distributions of the calibration parameters
$\langle u_\tau \rangle /U_b$ follows the trend of the DNS data. This approximately holds even at high Reynolds numbers, where there is a large systematic error in the algebraic model and no WRLES data are available. As expected, in this range due to scarcity of the DNS data, the uncertainty in the predictions is high. The plot in figure 3(b) shows the joint posterior distributions of the calibration parameters  $\kappa, A^+, {{\rm \Delta} x^+}$ and
$\kappa, A^+, {{\rm \Delta} x^+}$ and  ${{\rm \Delta} z^+}$ along with the histogram of each parameter. As mentioned above, the prior distributions of all of these parameters were assumed to be uniform and mutually independent. However, the resulting posterior densities for
${{\rm \Delta} z^+}$ along with the histogram of each parameter. As mentioned above, the prior distributions of all of these parameters were assumed to be uniform and mutually independent. However, the resulting posterior densities for  $\kappa$ and
$\kappa$ and  $A^+$ are not uniform and the samples of these parameters are correlated. More interestingly, the peak of the posterior density of
$A^+$ are not uniform and the samples of these parameters are correlated. More interestingly, the peak of the posterior density of  $\kappa$ is close to the value of
$\kappa$ is close to the value of  $0.4$ that is assumed to be universal across various flows and Reynolds numbers within the turbulence community. On the other hand, the distribution of
$0.4$ that is assumed to be universal across various flows and Reynolds numbers within the turbulence community. On the other hand, the distribution of  $A^+$ does not show a clear maximum, which may indicate that the range of admissible values in the prior could be extended. Note that indeed the value of
$A^+$ does not show a clear maximum, which may indicate that the range of admissible values in the prior could be extended. Note that indeed the value of  $A^+=25$ is associated with the van-Driest wall damping commonly used for eddy-viscosity models. In contrast, the posteriors of
$A^+=25$ is associated with the van-Driest wall damping commonly used for eddy-viscosity models. In contrast, the posteriors of  ${{\rm \Delta} x^+}$ and
${{\rm \Delta} x^+}$ and  ${{\rm \Delta} z^+}$ are found to be still close to the prior uniform distributions and no correlation between their samples is observed. This may be at least partially be due to the fact that the number of the WRLES data is limited as they are obtained only at 4 Reynolds numbers. Nevertheless, over this range of the Reynolds number the posterior prediction of the QoI
${{\rm \Delta} z^+}$ are found to be still close to the prior uniform distributions and no correlation between their samples is observed. This may be at least partially be due to the fact that the number of the WRLES data is limited as they are obtained only at 4 Reynolds numbers. Nevertheless, over this range of the Reynolds number the posterior prediction of the QoI  $\langle u_\tau \rangle$ is very accurate and has the lowest uncertainty, which seems to indicate that the significant dependence of the wall-shear stress on the WRLES resolution did not lead to a bias in the prediction by the HC-MFM. This may in fact be an important aspect for building future wall models.
$\langle u_\tau \rangle$ is very accurate and has the lowest uncertainty, which seems to indicate that the significant dependence of the wall-shear stress on the WRLES resolution did not lead to a bias in the prediction by the HC-MFM. This may in fact be an important aspect for building future wall models.

Figure 3. (a) Mean prediction of  $\langle u_\tau \rangle /U_b$ and associated
$\langle u_\tau \rangle /U_b$ and associated  $95\,\%$ CI along with the training data and validation data from DNS of Iwamoto et al. (Reference Iwamoto, Suzuki and Kasagi2002), Lee & Moser (Reference Lee and Moser2015) and Yamamoto & Tsuji (Reference Yamamoto and Tsuji2018), (b) diagonal, posterior density of parameters
$95\,\%$ CI along with the training data and validation data from DNS of Iwamoto et al. (Reference Iwamoto, Suzuki and Kasagi2002), Lee & Moser (Reference Lee and Moser2015) and Yamamoto & Tsuji (Reference Yamamoto and Tsuji2018), (b) diagonal, posterior density of parameters  $\kappa, A^+, {{\rm \Delta} x^+}$ and
$\kappa, A^+, {{\rm \Delta} x^+}$ and  ${{\rm \Delta} z^+}$; off diagonal, contour lines of the joint posterior densities of these parameters. The value of the contour lines increases from the lightest to darkest colour.
${{\rm \Delta} z^+}$; off diagonal, contour lines of the joint posterior densities of these parameters. The value of the contour lines increases from the lightest to darkest colour.
3.3. Polars for the NACA0015 airfoil
In this section, the HC-MFM (2.6) is applied to a set of data for the lift and drag coefficients,  $C_L$ and
$C_L$ and  $C_D$, respectively, of a wing with a NACA0015 airfoil profile at Reynolds number
$C_D$, respectively, of a wing with a NACA0015 airfoil profile at Reynolds number  $1.6\times 10^6$. The angle of attack (AoA) between the wing and the ambient flow is taken to be the design parameter
$1.6\times 10^6$. The angle of attack (AoA) between the wing and the ambient flow is taken to be the design parameter  $x$.
$x$.
The data consist of the following sources with respective fidelities in brackets: wind-tunnel experiments by Bertagnolio (Reference Bertagnolio2008) ( $M_1$), detached-eddy simulations (DES) (
$M_1$), detached-eddy simulations (DES) ( $M2$) and two-dimensional RANS (
$M2$) and two-dimensional RANS ( $M_3$) both by Gilling, Sørensen & Davidson (Reference Gilling, Sørensen and Davidson2009). The simulations of Gilling et al. (Reference Gilling, Sørensen and Davidson2009) were performed with a finite-volume code using a fourth-order central-difference scheme and a second-order accurate dual time-stepping algorithm to integrate the momentum equations. The PISO algorithm was used to enforce pressure–velocity coupling. In the study, the authors investigated the sensitivity of the DES results to the resolved turbulence intensity (TI) of the fluctuations imposed at the inlet boundary. The sensitivity was found to be particularly significant near the stall angle. Therefore, when constructing an MFM, the calibration parameter
$M_3$) both by Gilling, Sørensen & Davidson (Reference Gilling, Sørensen and Davidson2009). The simulations of Gilling et al. (Reference Gilling, Sørensen and Davidson2009) were performed with a finite-volume code using a fourth-order central-difference scheme and a second-order accurate dual time-stepping algorithm to integrate the momentum equations. The PISO algorithm was used to enforce pressure–velocity coupling. In the study, the authors investigated the sensitivity of the DES results to the resolved turbulence intensity (TI) of the fluctuations imposed at the inlet boundary. The sensitivity was found to be particularly significant near the stall angle. Therefore, when constructing an MFM, the calibration parameter  $t_2$ in fidelity
$t_2$ in fidelity  $M_2$ is taken to be the TI.
$M_2$ is taken to be the TI.
For the covariance of the Gaussian processes  $\hat {f}(x)$ and
$\hat {f}(x)$ and  $\hat {g}(x,t_2)$ in HC-MFM (2.6), the exponentiated quadratic and Matern-5/2 kernel functions (2.11) and (2.12) are used, respectively. The following prior distributions are assumed for the hyperparameters:
$\hat {g}(x,t_2)$ in HC-MFM (2.6), the exponentiated quadratic and Matern-5/2 kernel functions (2.11) and (2.12) are used, respectively. The following prior distributions are assumed for the hyperparameters:  $\lambda _f , \lambda _g \sim \mathcal {HC}(\alpha =5)$,
$\lambda _f , \lambda _g \sim \mathcal {HC}(\alpha =5)$,  $\ell _{f_x}\sim \varGamma (\alpha =1,\beta =5)$,
$\ell _{f_x}\sim \varGamma (\alpha =1,\beta =5)$,  $\ell _{g_x},\ell _{g_{t_2}}\sim \varGamma (\alpha =1,\beta =3)$ and the noise standard deviation
$\ell _{g_x},\ell _{g_{t_2}}\sim \varGamma (\alpha =1,\beta =3)$ and the noise standard deviation  $\sigma \sim \mathcal {HC}(\alpha =5)$ (assumed to be the same for all fidelities). To make the model capable of capturing large-scale separation, the stall AoA,
$\sigma \sim \mathcal {HC}(\alpha =5)$ (assumed to be the same for all fidelities). To make the model capable of capturing large-scale separation, the stall AoA,  $x_{stall}$, is included as a new calibration parameter in the MFM. Our suggestion is to consider a piecewise kernel function for the covariance of
$x_{stall}$, is included as a new calibration parameter in the MFM. Our suggestion is to consider a piecewise kernel function for the covariance of  $\hat {\delta }(x)$ where
$\hat {\delta }(x)$ where  $x_{stall}$ is the merging point. If the kernel functions for the AoAs smaller and larger than
$x_{stall}$ is the merging point. If the kernel functions for the AoAs smaller and larger than  $x_{stall}$ are denoted by
$x_{stall}$ are denoted by  $k_{\delta _1}({\cdot })$ and
$k_{\delta _1}({\cdot })$ and  $k_{\delta _2}({\cdot })$, respectively, then the covariance function for
$k_{\delta _2}({\cdot })$, respectively, then the covariance function for  $\hat {\delta }(x)$ may be constructed as
$\hat {\delta }(x)$ may be constructed as
 \begin{equation} \varSigma_{\delta_{ij}} = \lambda_{\delta_1}^2 \varphi(x_i) k_{\delta_1}(\bar{d}_{\delta_{ij}}) \varphi(x_j) + \lambda_{\delta_2}^2 \varphi(x_i) k_{\delta_2}(\bar{d}_{\delta_{ij}}) \varphi(x_j), \end{equation}
\begin{equation} \varSigma_{\delta_{ij}} = \lambda_{\delta_1}^2 \varphi(x_i) k_{\delta_1}(\bar{d}_{\delta_{ij}}) \varphi(x_j) + \lambda_{\delta_2}^2 \varphi(x_i) k_{\delta_2}(\bar{d}_{\delta_{ij}}) \varphi(x_j), \end{equation}
where  $\bar {d}_{\delta _{ij}}$ is defined similar to those in (2.9) and (2.10) but only in
$\bar {d}_{\delta _{ij}}$ is defined similar to those in (2.9) and (2.10) but only in  $x$, and
$x$, and  $\varphi (x)$ is a function to smoothly merge the two covariance functions. In particular, we use the logistic function:
$\varphi (x)$ is a function to smoothly merge the two covariance functions. In particular, we use the logistic function:
 \begin{equation} \varphi(x)=[1+\exp(-\alpha_{stall}(x-x_{stall}))]^{-1} , \end{equation}
\begin{equation} \varphi(x)=[1+\exp(-\alpha_{stall}(x-x_{stall}))]^{-1} , \end{equation}
where  $\alpha _{stall}$ is a new hyperparameter. The kernel functions
$\alpha _{stall}$ is a new hyperparameter. The kernel functions  $k_{\delta _1}({\cdot })$ and
$k_{\delta _1}({\cdot })$ and  $k_{\delta _2}({\cdot })$ are both modelled by the Matern-5/2 function (2.12). As the prior distributions, we assume
$k_{\delta _2}({\cdot })$ are both modelled by the Matern-5/2 function (2.12). As the prior distributions, we assume  $\lambda _{\delta _1}\sim \mathcal {HC}(\alpha =3)$,
$\lambda _{\delta _1}\sim \mathcal {HC}(\alpha =3)$,  $\lambda _{\delta _2}\sim \mathcal {HC}(\alpha =5)$,
$\lambda _{\delta _2}\sim \mathcal {HC}(\alpha =5)$,  $\ell _{\delta _1}\sim \varGamma (\alpha =1,\beta =5)$,
$\ell _{\delta _1}\sim \varGamma (\alpha =1,\beta =5)$,  $\ell _{\delta _2}\sim \varGamma (\alpha =1,\beta =0.5)$,
$\ell _{\delta _2}\sim \varGamma (\alpha =1,\beta =0.5)$,  $\alpha _{stall}\sim \mathcal {HC}(\alpha =2)$ and
$\alpha _{stall}\sim \mathcal {HC}(\alpha =2)$ and  $x_{stall}\sim \mathcal {N}(14,0.2)$. The prior for the TI is also considered to be Gaussian:
$x_{stall}\sim \mathcal {N}(14,0.2)$. The prior for the TI is also considered to be Gaussian:  ${TI}\sim \mathcal {N}(0.5,0.15)$. These Gaussian priors are selected based on our prior knowledge about the approximate stall AoA and the discussion about the influence of TI in Gilling et al. (Reference Gilling, Sørensen and Davidson2009).
${TI}\sim \mathcal {N}(0.5,0.15)$. These Gaussian priors are selected based on our prior knowledge about the approximate stall AoA and the discussion about the influence of TI in Gilling et al. (Reference Gilling, Sørensen and Davidson2009).
The admissible range of  $x={AoA}$ is assumed to be
$x={AoA}$ is assumed to be  $[0^\circ,20^\circ ]$ over which the experimental and RANS data (Bertagnolio Reference Bertagnolio2008; Gilling et al. Reference Gilling, Sørensen and Davidson2009) are available. The training HF data are taken to be a subset of size
$[0^\circ,20^\circ ]$ over which the experimental and RANS data (Bertagnolio Reference Bertagnolio2008; Gilling et al. Reference Gilling, Sørensen and Davidson2009) are available. The training HF data are taken to be a subset of size  $7$ of the experimental data of Bertagnolio (Reference Bertagnolio2008). The rest of the experimental data are used to validate the predictions of the MFM. For the purpose of examining the capability of the MFM in a more challenging situation, the training HF samples are explicitly selected to exclude the range of AoAs where the stall happens. The DES data of Gilling et al. (Reference Gilling, Sørensen and Davidson2009) are available at
$7$ of the experimental data of Bertagnolio (Reference Bertagnolio2008). The rest of the experimental data are used to validate the predictions of the MFM. For the purpose of examining the capability of the MFM in a more challenging situation, the training HF samples are explicitly selected to exclude the range of AoAs where the stall happens. The DES data of Gilling et al. (Reference Gilling, Sørensen and Davidson2009) are available at  $7$
$7$  ${AoA}\in [8^\circ,19^\circ ]$ and
${AoA}\in [8^\circ,19^\circ ]$ and  $5$ different values of TI. Employing these training data in the HC-MFM (2.6) and drawing
$5$ different values of TI. Employing these training data in the HC-MFM (2.6) and drawing  $10^4$ MCMC samples after excluding an extra
$10^4$ MCMC samples after excluding an extra  $5000$ initial samples for burn in, the predictions for
$5000$ initial samples for burn in, the predictions for  $C_L$ and
$C_L$ and  $C_D$ shown in figure 4(a,c) are obtained. The expected value of the predictions has a trend similar to that of the experimental validation data of Bertagnolio (Reference Bertagnolio2008) and is not diverging towards either the physically invalid RANS data or scattered DES data at
$C_D$ shown in figure 4(a,c) are obtained. The expected value of the predictions has a trend similar to that of the experimental validation data of Bertagnolio (Reference Bertagnolio2008) and is not diverging towards either the physically invalid RANS data or scattered DES data at  ${AoA}\gtrsim 10^\circ$. A more elaborate comparison is made through scatter plot of the MFM predictions against the validation data in figure 4(b,d). For both
${AoA}\gtrsim 10^\circ$. A more elaborate comparison is made through scatter plot of the MFM predictions against the validation data in figure 4(b,d). For both  $C_L$ and
$C_L$ and  $C_D$, the agreement between the predicted mean values with the validation data at lower AoAs (before stall) is excellent and for most of the higher AoAs, even near and after the stall, is very good. Due to the scarcity of the HF training data and also systematic error in the RANS and DES data, the error bars at the predicted values can be relatively large, as more evident in the case of
$C_D$, the agreement between the predicted mean values with the validation data at lower AoAs (before stall) is excellent and for most of the higher AoAs, even near and after the stall, is very good. Due to the scarcity of the HF training data and also systematic error in the RANS and DES data, the error bars at the predicted values can be relatively large, as more evident in the case of  $C_D$ in figure 4(d).
$C_D$ in figure 4(d).

Figure 4. (a) Lift coefficient  $C_L$ and (c) drag coefficient
$C_L$ and (c) drag coefficient  $C_D$ plotted against the AoA: the HC-MFM (2.6) is trained by the experimental data of Bertagnolio (Reference Bertagnolio2008) (yellow circles), as well as the DES (squares) and RANS (crosses) data by Gilling et al. (Reference Gilling, Sørensen and Davidson2009). The DES were performed with the resolved turbulence intensities
$C_D$ plotted against the AoA: the HC-MFM (2.6) is trained by the experimental data of Bertagnolio (Reference Bertagnolio2008) (yellow circles), as well as the DES (squares) and RANS (crosses) data by Gilling et al. (Reference Gilling, Sørensen and Davidson2009). The DES were performed with the resolved turbulence intensities  ${TI}=0\,\%,0.1\,\%,0.5\,\%,1\,{\%}$ and
${TI}=0\,\%,0.1\,\%,0.5\,\%,1\,{\%}$ and  $2\,{\%}$ at the inlet. The validation data (red triangles) are also taken from the experiments of Bertagnolio (Reference Bertagnolio2008). The mean prediction by the HC-MFM (2.6) is represented by the solid line along with associated
$2\,{\%}$ at the inlet. The validation data (red triangles) are also taken from the experiments of Bertagnolio (Reference Bertagnolio2008). The mean prediction by the HC-MFM (2.6) is represented by the solid line along with associated  $95\,{\%}$ CI (shaded area). Scatter plots of (b)
$95\,{\%}$ CI (shaded area). Scatter plots of (b)  $C_L$, (d)
$C_L$, (d)  $C_D$ predictions by the HC-MFM (vertical axis) against the validation data (horizontal axis). The red straight line is diagonal and provided to evaluate the accuracy of the HC-MFM predictions: if the hollow markers which represent the mean posterior prediction by the HC-MFM at the AoAs where validation data are available for, are close to the diagonal line, then they are more accurate. Each mean prediction has an error bar which represents the associated
$C_D$ predictions by the HC-MFM (vertical axis) against the validation data (horizontal axis). The red straight line is diagonal and provided to evaluate the accuracy of the HC-MFM predictions: if the hollow markers which represent the mean posterior prediction by the HC-MFM at the AoAs where validation data are available for, are close to the diagonal line, then they are more accurate. Each mean prediction has an error bar which represents the associated  $95 {\%}$ CI.
$95 {\%}$ CI.
Figure 5 shows the posterior densities of different parameters appearing in the MFM constructed for  $C_L$ and
$C_L$ and  $C_D$. As expected, the distribution of the kernels’ hyperparameters varies between the two QoIs. But more importantly, the posterior distributions of
$C_D$. As expected, the distribution of the kernels’ hyperparameters varies between the two QoIs. But more importantly, the posterior distributions of  $x_{stall}$ and calibrated TI are also dependent on the QoI. This clearly shows the suitability of the present class of MFMs in which calibration of the parameters of different fidelities is performed as a part of constructing the MFM for a given QoI. The alternative strategy, which is common in practice (e.g. for co-kriging models without calibration), is to calibrate the LF models against the HF data of one of the QoIs and then run the calibrated LF model to make realizations of all QoIs. However, given the present results, this strategy seems clearly less efficient and leads to inferior quality of prediction.
$x_{stall}$ and calibrated TI are also dependent on the QoI. This clearly shows the suitability of the present class of MFMs in which calibration of the parameters of different fidelities is performed as a part of constructing the MFM for a given QoI. The alternative strategy, which is common in practice (e.g. for co-kriging models without calibration), is to calibrate the LF models against the HF data of one of the QoIs and then run the calibrated LF model to make realizations of all QoIs. However, given the present results, this strategy seems clearly less efficient and leads to inferior quality of prediction.

Figure 5. Posterior PDFs of the calibration parameters and hyperparameters of the GPs appearing in the HC-MFM (2.6) for (a)  $C_L$ and (b)
$C_L$ and (b)  $C_D$. Associated training data and predictions are shown in figure 4. In the plots of
$C_D$. Associated training data and predictions are shown in figure 4. In the plots of  $\ell _g$, the blue and red histograms correspond to the AoA and TI, respectively. Note that the values of TI are in percentage.
$\ell _g$, the blue and red histograms correspond to the AoA and TI, respectively. Note that the values of TI are in percentage.
As a general goal, an MFM constructs a surrogate for the QoIs in the space of the design/controlled parameters aiming for the surrogate outputs to be as close as possible to the HF data. In this regard, the MFMs facilitate applying different types of sample-based UQ techniques and optimization (see Smith Reference Smith2013). In connection with the present example, consider a UQ forward problem to estimate the stochastic moments of  $C_L$ and
$C_L$ and  $C_D$ due to the variation of the AoA. For instance, assume
$C_D$ due to the variation of the AoA. For instance, assume  ${AoA}\sim \mathcal {N}(15,0.1)$ degrees. This results in the following estimations for the expectation and variance of
${AoA}\sim \mathcal {N}(15,0.1)$ degrees. This results in the following estimations for the expectation and variance of  $C_L$ and
$C_L$ and  $C_D$ with the associated
$C_D$ with the associated  $95\,\%$ CIs:
$95\,\%$ CIs:  $\mathbb {E}_x[C_L]=1.1775 \pm 0.1037$,
$\mathbb {E}_x[C_L]=1.1775 \pm 0.1037$,  $\mathbb {V}_x[C_L]=2.6675 \times 10^{-5} \pm 4.5096\times 10^{-5}$,
$\mathbb {V}_x[C_L]=2.6675 \times 10^{-5} \pm 4.5096\times 10^{-5}$,  $\mathbb {E}_x[C_D]=5.6891\times 10^{-2} \pm 2.5722\times 10^{-2}$ and
$\mathbb {E}_x[C_D]=5.6891\times 10^{-2} \pm 2.5722\times 10^{-2}$ and  $\mathbb {V}_x[C_D]=1.0618 \times 10^{-5} \pm 9.5994\times 10^{-6}$. Note that, without the HC-MFM, and only based on the data of RANS or/and DES, such estimations would be at best inaccurate, but in general impossible to make.
$\mathbb {V}_x[C_D]=1.0618 \times 10^{-5} \pm 9.5994\times 10^{-6}$. Note that, without the HC-MFM, and only based on the data of RANS or/and DES, such estimations would be at best inaccurate, but in general impossible to make.
3.4. Effect of geometrical uncertainties in the periodic hill flow
In this last flow case, we consider the turbulent flow over periodic hills with geometrical uncertainties at Reynolds number  $5600$, see the sketch in figure 6. The outline in blue corresponds to the configuration studied in several prior works (hereafter, baseline geometry), for example by Fröhlich et al. (Reference Fröhlich, Mellen, Rodi, Temmerman and Leschziner2005) and more recently by Gao, Cheng & Samtaney (Reference Gao, Cheng and Samtaney2020). The latter reference can be consulted for a good overview of other previous efforts. The shape of the hill is defined by six segments of third-order polynomials, see e.g. Xiao et al. (Reference Xiao, Wi, Laizet and Duan2020) for the exact definition. In that work, a parameterization of the geometry was introduced by scaling the length of the hill. Particularly, the authors performed a series of DNS for
$5600$, see the sketch in figure 6. The outline in blue corresponds to the configuration studied in several prior works (hereafter, baseline geometry), for example by Fröhlich et al. (Reference Fröhlich, Mellen, Rodi, Temmerman and Leschziner2005) and more recently by Gao, Cheng & Samtaney (Reference Gao, Cheng and Samtaney2020). The latter reference can be consulted for a good overview of other previous efforts. The shape of the hill is defined by six segments of third-order polynomials, see e.g. Xiao et al. (Reference Xiao, Wi, Laizet and Duan2020) for the exact definition. In that work, a parameterization of the geometry was introduced by scaling the length of the hill. Particularly, the authors performed a series of DNS for  $L_{x}/h = 3.858 \alpha + 5.142$, where
$L_{x}/h = 3.858 \alpha + 5.142$, where  $L_x$ is the length of the geometry,
$L_x$ is the length of the geometry,  $h$ is the height of the hill and
$h$ is the height of the hill and  $\alpha$ is a parameter. The value
$\alpha$ is a parameter. The value  $\alpha =1$ corresponds to the baseline geometry. The corresponding DNS data set for several values of
$\alpha =1$ corresponds to the baseline geometry. The corresponding DNS data set for several values of  $\alpha$ has been made public on Github, which was extended in 2021 with additional data introducing a new parameter
$\alpha$ has been made public on Github, which was extended in 2021 with additional data introducing a new parameter  $\gamma$:
$\gamma$:
 \begin{equation} L_{x}/h = 3.858 \alpha + 5.142 \gamma. \end{equation}
\begin{equation} L_{x}/h = 3.858 \alpha + 5.142 \gamma. \end{equation}
The effect of  $\alpha$ and
$\alpha$ and  $\gamma$ on the geometry is illustrated in figure 6 with red and black curves, respectively. The purpose of the present example is to demonstrate how the HC-MFM can be used to economically assess the effect of uncertain parameters
$\gamma$ on the geometry is illustrated in figure 6 with red and black curves, respectively. The purpose of the present example is to demonstrate how the HC-MFM can be used to economically assess the effect of uncertain parameters  $\alpha$ and
$\alpha$ and  $\gamma$ on the flow QoIs. To that end we combine the DNS data discussed above from Xiao et al. (Reference Xiao, Wi, Laizet and Duan2020) with data from RANS simulations performed by us using ANSYS Fluent (2019). The data from the latter are made publicly available (archive available via the following doi:10.6084/m9.figshare.21440418).
$\gamma$ on the flow QoIs. To that end we combine the DNS data discussed above from Xiao et al. (Reference Xiao, Wi, Laizet and Duan2020) with data from RANS simulations performed by us using ANSYS Fluent (2019). The data from the latter are made publicly available (archive available via the following doi:10.6084/m9.figshare.21440418).

Figure 6. The geometry of the periodic hill simulations, illustrating the effect of parameters  $\alpha$ and
$\alpha$ and  $\gamma$ using three sets of values for them.
$\gamma$ using three sets of values for them.
For the DNS we use the data for  $\alpha \in \{0.5, 1.0, 1.5\}$ and
$\alpha \in \{0.5, 1.0, 1.5\}$ and  $\gamma \in \{0.4166, 1.0, 1.5834\}$. The same values are also used for the RANS, complemented by two additional samples for both
$\gamma \in \{0.4166, 1.0, 1.5834\}$. The same values are also used for the RANS, complemented by two additional samples for both  $\alpha$ and
$\alpha$ and  $\gamma$ for which DNS results are not available. These are selected based on the Gauss–Legendre quadrature rule and are equal to
$\gamma$ for which DNS results are not available. These are selected based on the Gauss–Legendre quadrature rule and are equal to  $\alpha = \{0.702, 1.297\}$ and
$\alpha = \{0.702, 1.297\}$ and  $\gamma = \{0.653, 1.347\}$. Therefore, there is a total of
$\gamma = \{0.653, 1.347\}$. Therefore, there is a total of  $5\times 5$ samples over the space of
$5\times 5$ samples over the space of  $\alpha$–
$\alpha$– $\gamma$ corresponding to which RANS simulations are performed. For the uncertainty propagation and sensitivity analysis, see below, we assume
$\gamma$ corresponding to which RANS simulations are performed. For the uncertainty propagation and sensitivity analysis, see below, we assume  $\alpha$ and
$\alpha$ and  $\gamma$ to be independent, and
$\gamma$ to be independent, and  $\alpha \sim \mathcal {U}[0.448,1.552]$ and
$\alpha \sim \mathcal {U}[0.448,1.552]$ and  $\gamma \sim \mathcal {U}[0.356,1.644]$.
$\gamma \sim \mathcal {U}[0.356,1.644]$.
The standard  $k$–
$k$– $\omega$ turbulence model is used in the RANS simulations, as defined in ANSYS Fluent (2019) based on the work of Wilcox (Reference Wilcox2006). The available low-Reynolds-number correction to the model was not used. The model depends on a number of parameters which are listed in ANSYS Fluent (2019, p. 61). It can be shown (see Wilcox Reference Wilcox2006, p. 134) that the parameters
$\omega$ turbulence model is used in the RANS simulations, as defined in ANSYS Fluent (2019) based on the work of Wilcox (Reference Wilcox2006). The available low-Reynolds-number correction to the model was not used. The model depends on a number of parameters which are listed in ANSYS Fluent (2019, p. 61). It can be shown (see Wilcox Reference Wilcox2006, p. 134) that the parameters  $\alpha _\infty, \beta ^*_\infty$,
$\alpha _\infty, \beta ^*_\infty$,  $\sigma$ and
$\sigma$ and  $\beta _i$ are coupled to the von Karmán coefficient
$\beta _i$ are coupled to the von Karmán coefficient  $\kappa$ through the following equation:
$\kappa$ through the following equation:
 \begin{equation} \alpha_\infty = \beta_i/\beta_\infty^* - \sigma \kappa^2/\sqrt{\beta_\infty^*}. \end{equation}
\begin{equation} \alpha_\infty = \beta_i/\beta_\infty^* - \sigma \kappa^2/\sqrt{\beta_\infty^*}. \end{equation}
To illustrate the automatic calibration capability of the HC-MFM, we assume  $\kappa$ to be uncertain and perform simulations for five sample values of
$\kappa$ to be uncertain and perform simulations for five sample values of  $\kappa \in \{ 0.348, 0.367, 0.4, 0.433, 0.452\}$, which follow the Gauss–Legendre quadrature rule. To prescribe the desired value of
$\kappa \in \{ 0.348, 0.367, 0.4, 0.433, 0.452\}$, which follow the Gauss–Legendre quadrature rule. To prescribe the desired value of  $\kappa$, we set
$\kappa$, we set  $\alpha _\infty = 0.52, \sigma = 0.5$,
$\alpha _\infty = 0.52, \sigma = 0.5$,  $\beta _i = 0.0708$ (as suggested by Wilcox Reference Wilcox2006, p. 135), and manipulate
$\beta _i = 0.0708$ (as suggested by Wilcox Reference Wilcox2006, p. 135), and manipulate  $\beta _\infty ^*$ according to (3.7). Note that the considered training samples include the standard choice
$\beta _\infty ^*$ according to (3.7). Note that the considered training samples include the standard choice  $\beta _\infty ^* = 0.09$, corresponding to
$\beta _\infty ^* = 0.09$, corresponding to  $\kappa = 0.4$. Using five samples for each of
$\kappa = 0.4$. Using five samples for each of  $\alpha, \gamma$ and
$\alpha, \gamma$ and  $\kappa$ and using a tensor-product rule, a total of 125 RANS simulations were performed for this study.
$\kappa$ and using a tensor-product rule, a total of 125 RANS simulations were performed for this study.
For RANS simulations, quadrilateral cells were used to discretize the computational domains, with the total grid size ranging from  $\approx 150 \times 10^3$ to
$\approx 150 \times 10^3$ to  $\approx 500 \times 10^3$ cells, depending on the domain size as defined by
$\approx 500 \times 10^3$ cells, depending on the domain size as defined by  $\alpha$ and
$\alpha$ and  $\gamma$. Since the selected turbulence model requires accurate resolution of the boundary layer, the selection of the mesh size was guided by the discretization in the corresponding DNS case (Xiao et al. Reference Xiao, Wi, Laizet and Duan2020). Specifically, we adopted the same number of cells in the streamwise and wall-normal directions as in the DNS, and applied size grading in the wall-normal direction to ensure low values of
$\gamma$. Since the selected turbulence model requires accurate resolution of the boundary layer, the selection of the mesh size was guided by the discretization in the corresponding DNS case (Xiao et al. Reference Xiao, Wi, Laizet and Duan2020). Specifically, we adopted the same number of cells in the streamwise and wall-normal directions as in the DNS, and applied size grading in the wall-normal direction to ensure low values of  $y^+$. This means that in the streamwise direction the mesh may be unnecessarily fine for RANS, but since these simulations are two-dimensional and steady state, they are still negligibly cheap compared with the DNS.
$y^+$. This means that in the streamwise direction the mesh may be unnecessarily fine for RANS, but since these simulations are two-dimensional and steady state, they are still negligibly cheap compared with the DNS.
Second-order numerical schemes were used to discretize the RANS equations in ANSYS Fluent (2019). Specifically, for the convective fluxes, a second-order upwind scheme was used, combined with linear interpolation for the diffusive fluxes. The coupled solver was used for pressure–velocity coupling, which did an excellent job at converging the simulations.
3.4.1. Creating ground truth and verifying the model
Using all nine DNS data sets available from Xiao et al. (Reference Xiao, Wi, Laizet and Duan2020), the response surface of the QoIs at the space of  $\alpha$–
$\alpha$– $\gamma$ and associated PDF of the QoIs can be estimated. These will be used as the ground truth or reference to evaluate the performance of the HC-MFM in the following analyses. The interpolation from the DNS samples to an arbitrary mesh covering the whole admissible range of
$\gamma$ and associated PDF of the QoIs can be estimated. These will be used as the ground truth or reference to evaluate the performance of the HC-MFM in the following analyses. The interpolation from the DNS samples to an arbitrary mesh covering the whole admissible range of  $\alpha$ and
$\alpha$ and  $\gamma$ can be done using polynomial-based methods such as PCE (used here) or Lagrange interpolation, as well as GPR. Based on the data available from Xiao et al. (Reference Xiao, Wi, Laizet and Duan2020) and the performed RANS simulations, different QoIs can be considered. Hereafter, to demonstrate the power of the method, we take the normalized height of the separation bubble,
$\gamma$ can be done using polynomial-based methods such as PCE (used here) or Lagrange interpolation, as well as GPR. Based on the data available from Xiao et al. (Reference Xiao, Wi, Laizet and Duan2020) and the performed RANS simulations, different QoIs can be considered. Hereafter, to demonstrate the power of the method, we take the normalized height of the separation bubble,  $H_{bubble}/h$ at the streamwise location
$H_{bubble}/h$ at the streamwise location  $x/h=2.5$ as the QoI. Alternatively other locations
$x/h=2.5$ as the QoI. Alternatively other locations  $x/h$ as well as different flow quantities could be considered. The response surface of the QoI and associated PDF are illustrated in figure 7. Based on the pattern of the isolines, we can observe that the parameter
$x/h$ as well as different flow quantities could be considered. The response surface of the QoI and associated PDF are illustrated in figure 7. Based on the pattern of the isolines, we can observe that the parameter  $\alpha$ exhibits a stronger influence on the QoI than
$\alpha$ exhibits a stronger influence on the QoI than  $\gamma$. This can be quantitatively confirmed via the values of the total Sobol indices (Sobol Reference Sobol2001) as reported in table 1. The resulting PDF has one peak showing the most probable observed value of
$\gamma$. This can be quantitatively confirmed via the values of the total Sobol indices (Sobol Reference Sobol2001) as reported in table 1. The resulting PDF has one peak showing the most probable observed value of  $H_{bubble}/h$ at
$H_{bubble}/h$ at  $x/h=2.5$ and a plateau approximately over
$x/h=2.5$ and a plateau approximately over  $H_{bubble}/h=[0.46,0.53]$.
$H_{bubble}/h=[0.46,0.53]$.

Figure 7. (a) Isolines of the response surface and (b) PDF of  $H_{bubble}/h$ at
$H_{bubble}/h$ at  $x/h=2.5$ due to the variation of
$x/h=2.5$ due to the variation of  $\alpha$ and
$\alpha$ and  $\gamma$ using all of the nine DNS data of Xiao et al. (Reference Xiao, Wi, Laizet and Duan2020) (represented by the symbols in the left plot). These plots are considered as ground truth or reference for evaluating the performance of the MFM.
$\gamma$ using all of the nine DNS data of Xiao et al. (Reference Xiao, Wi, Laizet and Duan2020) (represented by the symbols in the left plot). These plots are considered as ground truth or reference for evaluating the performance of the MFM.
Table 1. Estimated mean, standard deviation and total Sobol indices of the QoI  $R=H_{bubble}/h$ at
$R=H_{bubble}/h$ at  $x/h=2.5$ due to the uncertainty in
$x/h=2.5$ due to the uncertainty in  $\alpha$ and
$\alpha$ and  $\gamma$. For the LF (RANS) data the uncertainty and sensitivity with respect to parameter
$\gamma$. For the LF (RANS) data the uncertainty and sensitivity with respect to parameter  $\kappa$ is also included. For the case-A and case-B data sets used for multifidelity modelling, see figure 9.
$\kappa$ is also included. For the case-A and case-B data sets used for multifidelity modelling, see figure 9.

The reference posterior distribution of  $\kappa$ as the RANS calibration parameter can now be inferred. To this end, the HC-MFM described in § 3.4.2 is constructed using nine DNS data sets of Xiao et al. (Reference Xiao, Wi, Laizet and Duan2020) and
$\kappa$ as the RANS calibration parameter can now be inferred. To this end, the HC-MFM described in § 3.4.2 is constructed using nine DNS data sets of Xiao et al. (Reference Xiao, Wi, Laizet and Duan2020) and  $125$ RANS simulations. The prior distribution of
$125$ RANS simulations. The prior distribution of  $\kappa$ is taken to be uniform over the range of
$\kappa$ is taken to be uniform over the range of  $[0.3,0.5]$. This non-informative prior distribution removes any bias towards any particular value in the distribution of
$[0.3,0.5]$. This non-informative prior distribution removes any bias towards any particular value in the distribution of  $\kappa$. Through a Bayesian inference via an MCMC method, the sample posterior distribution of
$\kappa$. Through a Bayesian inference via an MCMC method, the sample posterior distribution of  $\kappa$ shown in figure 8(a) is obtained. Note that this calibration is in fact a pure UQ inverse problem, see e.g. Smith (Reference Smith2013), where all the RANS data are utilized to construct a surrogate for
$\kappa$ shown in figure 8(a) is obtained. Note that this calibration is in fact a pure UQ inverse problem, see e.g. Smith (Reference Smith2013), where all the RANS data are utilized to construct a surrogate for  $\kappa$, and the DNS data are used as training data to infer the distribution of
$\kappa$, and the DNS data are used as training data to infer the distribution of  $\kappa$. The estimated mean and standard deviation of the posterior distribution of
$\kappa$. The estimated mean and standard deviation of the posterior distribution of  $\kappa$ are
$\kappa$ are  $0.47087$ and
$0.47087$ and  $0.05387$, respectively. As compared with the standard value
$0.05387$, respectively. As compared with the standard value  $0.4$ being used in the literature, the estimated mean is somewhat larger. However, from a physical point of view, one would not expect an accurate value of
$0.4$ being used in the literature, the estimated mean is somewhat larger. However, from a physical point of view, one would not expect an accurate value of  $\kappa$ for this type of flow due to the separated nature and the relatively low Reynolds number.
$\kappa$ for this type of flow due to the separated nature and the relatively low Reynolds number.

Figure 8. (a) The sample posterior PDF of  $\kappa$ and (b) sample joint PDF of
$\kappa$ and (b) sample joint PDF of  $H_{bubble}/h$ at
$H_{bubble}/h$ at  $x/h=2.5$ obtained from the HC-MFM using all nine DNS data sets of Xiao et al. (Reference Xiao, Wi, Laizet and Duan2020) along with the
$x/h=2.5$ obtained from the HC-MFM using all nine DNS data sets of Xiao et al. (Reference Xiao, Wi, Laizet and Duan2020) along with the  $125$ RANS simulations performed in the present study. The RANS simulations are performed using five samples of
$125$ RANS simulations performed in the present study. The RANS simulations are performed using five samples of  $\kappa$ equal to
$\kappa$ equal to  $0.348$,
$0.348$,  $0.367$,
$0.367$,  $0.4$,
$0.4$,  $0.433$ and
$0.433$ and  $0.452$. The marginal PDFs on the top and right axes are found using the kernel density estimation method.
$0.452$. The marginal PDFs on the top and right axes are found using the kernel density estimation method.
Another advantage of using all the available RANS and DNS data in the HC-MFM is that the implementation (algorithm and coding) of the HC-MFM can be verified. As shown in figure 8(b), the prediction of the HC-MFM constructed by combining all DNS and RANS data sets completely agree with the predictions of the single-fidelity model based on only the DNS data. Note that the predicted marginal PDF of the QoI in the HC-MFM is the same as the reference PDF in figure 7.
3.4.2. Application of the HC-MFM
Adopting the general notation of § 2, the HC-MFM for the present example can be written as
 \begin{equation} \left.\begin{array}{ll@{}} y_{M_1}(\boldsymbol{x}_i) = {\hat{f}(\boldsymbol{x}_i,\theta_{2_i})} + {\hat{\delta}(\boldsymbol{x}_i)} + \varepsilon_{1_i} & i=1,2,\ldots,n_1 \\ y_{M_2}(\boldsymbol{x}_{i}) = {\hat{f}(\boldsymbol{x}_i,t_{2_i})}+ \varepsilon_{2_i} & i=1+n_1,2+n_1, \ldots , n_2+n_1 \end{array}\right\}, \end{equation}
\begin{equation} \left.\begin{array}{ll@{}} y_{M_1}(\boldsymbol{x}_i) = {\hat{f}(\boldsymbol{x}_i,\theta_{2_i})} + {\hat{\delta}(\boldsymbol{x}_i)} + \varepsilon_{1_i} & i=1,2,\ldots,n_1 \\ y_{M_2}(\boldsymbol{x}_{i}) = {\hat{f}(\boldsymbol{x}_i,t_{2_i})}+ \varepsilon_{2_i} & i=1+n_1,2+n_1, \ldots , n_2+n_1 \end{array}\right\}, \end{equation}
where  $M_1$ and
$M_1$ and  $M_2$ denote DNS and RANS, respectively, the design parameters are
$M_2$ denote DNS and RANS, respectively, the design parameters are  $\boldsymbol {x}_i=(\alpha _i,\gamma _i)$ and,
$\boldsymbol {x}_i=(\alpha _i,\gamma _i)$ and,  $t_{2}$ and
$t_{2}$ and  $\theta _2$ refer to the simulated and calibrated instances of
$\theta _2$ refer to the simulated and calibrated instances of  $\kappa$, respectively. The kernel of
$\kappa$, respectively. The kernel of  $\hat {f}(\boldsymbol {x},t_2)$ is taken to be the exponentiated quadratic function (2.11), while for
$\hat {f}(\boldsymbol {x},t_2)$ is taken to be the exponentiated quadratic function (2.11), while for  $\hat {\delta }(\boldsymbol {x})$, the Matern-5/2 function (2.12) is employed. For the hyperparameters, the following prior distributions are considered:
$\hat {\delta }(\boldsymbol {x})$, the Matern-5/2 function (2.12) is employed. For the hyperparameters, the following prior distributions are considered:  $\kappa \sim \mathcal {U}[0.3,0.5]$,
$\kappa \sim \mathcal {U}[0.3,0.5]$,  $\lambda _f \sim \mathcal {HC}(\alpha =5)$,
$\lambda _f \sim \mathcal {HC}(\alpha =5)$,  $\ell _{f_{\boldsymbol {x}}},\ell _{f_{t_2}}\sim \varGamma (\alpha =1,\beta =5)$,
$\ell _{f_{\boldsymbol {x}}},\ell _{f_{t_2}}\sim \varGamma (\alpha =1,\beta =5)$,  $\lambda _\delta \sim \mathcal {HC}(\alpha =1)$ and
$\lambda _\delta \sim \mathcal {HC}(\alpha =1)$ and  $\ell _{\delta _{\boldsymbol {x}}} \sim \varGamma (\alpha =1,\beta =1)$. In this example, the uncertainty in the DNS and RANS data is neglected. Despite this, when implementing the model in PyMC3 (Salvatier et al. Reference Salvatier, Wiecki and Fonnesbeck2016), the prior of the Gaussian noise standard deviation is set to be
$\ell _{\delta _{\boldsymbol {x}}} \sim \varGamma (\alpha =1,\beta =1)$. In this example, the uncertainty in the DNS and RANS data is neglected. Despite this, when implementing the model in PyMC3 (Salvatier et al. Reference Salvatier, Wiecki and Fonnesbeck2016), the prior of the Gaussian noise standard deviation is set to be  $\sigma \sim \mathcal {HC}(\alpha =5)$ (same for both fidelities). But, as expected, the mean and standard deviation of the posterior distribution of
$\sigma \sim \mathcal {HC}(\alpha =5)$ (same for both fidelities). But, as expected, the mean and standard deviation of the posterior distribution of  $\sigma$ are obtained to be approximately zero.
$\sigma$ are obtained to be approximately zero.
The hyperparameters will be inferred from the combined set of  $n_1$ DNS and
$n_1$ DNS and  $n_2$ RANS data. In the analyses to follow, we use all the RANS simulations as LF data, therefore
$n_2$ RANS data. In the analyses to follow, we use all the RANS simulations as LF data, therefore  $n_2=125$. Two subsets of the DNS data of Xiao et al. (Reference Xiao, Wi, Laizet and Duan2020) with sizes
$n_2=125$. Two subsets of the DNS data of Xiao et al. (Reference Xiao, Wi, Laizet and Duan2020) with sizes  $n_1=4$ and
$n_1=4$ and  $5$ are taken to be the HF data. Combining these two HF data sets with the LF data, case-A and case-B data sets are obtained for multifidelity modelling. Figure 9 represents the samples of these two cases in the space of
$5$ are taken to be the HF data. Combining these two HF data sets with the LF data, case-A and case-B data sets are obtained for multifidelity modelling. Figure 9 represents the samples of these two cases in the space of  $\alpha$–
$\alpha$– $\gamma$ parameters.
$\gamma$ parameters.

Figure 9. Schematic representation of the samples from  $\alpha$ and
$\alpha$ and  $\gamma$ corresponding to the LF,
$\gamma$ corresponding to the LF,  $\times$, HF,
$\times$, HF,  $\Box$ and all available DNS data from Xiao et al. (Reference Xiao, Wi, Laizet and Duan2020),
$\Box$ and all available DNS data from Xiao et al. (Reference Xiao, Wi, Laizet and Duan2020),  $\circ$. In the text, (a) and (b) are referred to as case-A and case-B, respectively. Note that, for both cases, there are five samples for
$\circ$. In the text, (a) and (b) are referred to as case-A and case-B, respectively. Note that, for both cases, there are five samples for  $\kappa$ associated with each of the LF samples represented here.
$\kappa$ associated with each of the LF samples represented here.
Before constructing the HC-MFM, it is important to look at the LF data. In figure 10, the PDF of the QoI due to the variation of  $\alpha$ and
$\alpha$ and  $\gamma$ for different training samples of
$\gamma$ for different training samples of  $\kappa$ is represented. The two expected yet important observations are that the PDF of the QoI is significantly influenced by the value of
$\kappa$ is represented. The two expected yet important observations are that the PDF of the QoI is significantly influenced by the value of  $\kappa$ used in the RANS simulations, and the fact that the PDFs are much different from the ground truth PDF shown in figure 7. The larger influence of
$\kappa$ used in the RANS simulations, and the fact that the PDFs are much different from the ground truth PDF shown in figure 7. The larger influence of  $\kappa$ compared with
$\kappa$ compared with  $\alpha$ and
$\alpha$ and  $\gamma$ is also reflected in the associated Sobol indices (Sobol Reference Sobol2001), as reported in table 1. Note that the PDF of the QoI considering the simultaneous variation of
$\gamma$ is also reflected in the associated Sobol indices (Sobol Reference Sobol2001), as reported in table 1. Note that the PDF of the QoI considering the simultaneous variation of  $\alpha, \gamma$, and
$\alpha, \gamma$, and  $\kappa$ is shown in figure 10(f).
$\kappa$ is shown in figure 10(f).

Figure 10. (a–e) The PDF of  $H_{bubble}/h$ at
$H_{bubble}/h$ at  $x/h=2.5$ due to the variation of
$x/h=2.5$ due to the variation of  $\alpha$ and
$\alpha$ and  $\gamma$ using the RANS data simulated with
$\gamma$ using the RANS data simulated with  $\kappa$ equal to
$\kappa$ equal to  $0.348$,
$0.348$,  $0.367$,
$0.367$,  $0.400$,
$0.400$,  $0.433$,
$0.433$,  $0.452$, respectively. Note that
$0.452$, respectively. Note that  $5\times 5$ samples are taken from the
$5\times 5$ samples are taken from the  $\alpha$–
$\alpha$– $\gamma$ space at each of these constant-
$\gamma$ space at each of these constant- $\kappa$ simulations. The PDF in (f) is obtained using all the
$\kappa$ simulations. The PDF in (f) is obtained using all the  $5 \times 5 \times 5$ samples from
$5 \times 5 \times 5$ samples from  $\alpha, \gamma$ and
$\alpha, \gamma$ and  $\kappa$.
$\kappa$.

Figure 11. (a,b) Isolines of the response surface and (c,d) PDF of  $H_{bubble}/h$ at
$H_{bubble}/h$ at  $x/h=2.5$ due to the variation of
$x/h=2.5$ due to the variation of  $\alpha$ and
$\alpha$ and  $\gamma$ using the HF data of (a,c) case-A and (b,d) case-B. The data are taken from the DNS of Xiao et al. (Reference Xiao, Wi, Laizet and Duan2020) and are specified by dots in (a,b).
$\gamma$ using the HF data of (a,c) case-A and (b,d) case-B. The data are taken from the DNS of Xiao et al. (Reference Xiao, Wi, Laizet and Duan2020) and are specified by dots in (a,b).
The response surface and PDF of the QoI obtained from only the HF data of case-A and case-B are illustrated in figure 11. For case-A with  $n_1=4$ HF data, the PDF of the QoI has a plateau which makes it clearly different from the reference PDF in figure 7. By adding only one more DNS data point and obtaining case-B, the response surface becomes more similar to the reference, however, the associated PDF is still single mode. The improved predictions through the application of the HC-MFM are shown in figure 12. Compared with the HF-data in figure 11, the PDFs of the QoI clearly exhibit a second peak for the values between
$n_1=4$ HF data, the PDF of the QoI has a plateau which makes it clearly different from the reference PDF in figure 7. By adding only one more DNS data point and obtaining case-B, the response surface becomes more similar to the reference, however, the associated PDF is still single mode. The improved predictions through the application of the HC-MFM are shown in figure 12. Compared with the HF-data in figure 11, the PDFs of the QoI clearly exhibit a second peak for the values between  $0.5$ and
$0.5$ and  $0.6$. This peak has been introduced by adding the LF data, see figure 10(f), and this is, in fact, the task for the MFM to adjust the involved hyperparameters such that the fusion of the data at the two fidelities leads to a PDF similar to the reference. Clearly, for case-B with only five DNS data samples included, the PDF and response surface of the QoI are very close to the ground truth in figure 7 (nine DNS). This can also be confirmed by plotting the associated HC-MFM predictions against the reference data at all test points in the
$0.6$. This peak has been introduced by adding the LF data, see figure 10(f), and this is, in fact, the task for the MFM to adjust the involved hyperparameters such that the fusion of the data at the two fidelities leads to a PDF similar to the reference. Clearly, for case-B with only five DNS data samples included, the PDF and response surface of the QoI are very close to the ground truth in figure 7 (nine DNS). This can also be confirmed by plotting the associated HC-MFM predictions against the reference data at all test points in the  $\alpha$–
$\alpha$– $\gamma$ plane, see figure 13. The joint PDF of these two sets of data for both considered cases is narrow, specifically for case-B, and hence implies a low point-to-point deviation of the predictions from the reference values. It is also interesting to look at the posterior distribution of the RANS calibration parameter
$\gamma$ plane, see figure 13. The joint PDF of these two sets of data for both considered cases is narrow, specifically for case-B, and hence implies a low point-to-point deviation of the predictions from the reference values. It is also interesting to look at the posterior distribution of the RANS calibration parameter  $\kappa$. It is not surprising that the resulting PDFs from the multifidelity data sets case-A and case-B are different in spite of having the same uniform prior distribution. Two important observations here are the following: first, in contrast to the previous examples in the present study, even with a small number of HF-data, i.e. case-A, a significantly informative PDF for the LF calibration parameter is obtained. Second, for case-B, the posterior distribution of
$\kappa$. It is not surprising that the resulting PDFs from the multifidelity data sets case-A and case-B are different in spite of having the same uniform prior distribution. Two important observations here are the following: first, in contrast to the previous examples in the present study, even with a small number of HF-data, i.e. case-A, a significantly informative PDF for the LF calibration parameter is obtained. Second, for case-B, the posterior distribution of  $\kappa$ is very similar to the reference case where nine DNS data sets are used, see figure 8. Thus, depending on the case, the HC-MFM is capable of calibrating the model parameters in a fairly accurate way at the same time of constructing an accurate predictive model. This somewhat challenges the conclusion which could be drawn from the previous examples in the present study and also by Goh et al. (Reference Goh, Bingham, Holloway, Grosskopf, Kuranz and Rutter2013), where the priority of the HC-MFM is found to make accurate predictions for the QoI rather than providing accurate calibration of the fidelity-specific parameters.
$\kappa$ is very similar to the reference case where nine DNS data sets are used, see figure 8. Thus, depending on the case, the HC-MFM is capable of calibrating the model parameters in a fairly accurate way at the same time of constructing an accurate predictive model. This somewhat challenges the conclusion which could be drawn from the previous examples in the present study and also by Goh et al. (Reference Goh, Bingham, Holloway, Grosskopf, Kuranz and Rutter2013), where the priority of the HC-MFM is found to make accurate predictions for the QoI rather than providing accurate calibration of the fidelity-specific parameters.

Figure 12. (a,b) Isolines of the response surface and (c,d) PDF of  $H_{bubble}/h$ at
$H_{bubble}/h$ at  $x/h=2.5$ due to the variation of
$x/h=2.5$ due to the variation of  $\alpha$ and
$\alpha$ and  $\gamma$ obtained from the HC-MFM with the data of (a,c) case-A and (b,d) case-B. In (c,d), the PDF resulting from the HC-MFM is compared with the PDFs of the ground truth (see figure 7), LF data (LFM, figure 10) and HF data (HFM, figure 11).
$\gamma$ obtained from the HC-MFM with the data of (a,c) case-A and (b,d) case-B. In (c,d), the PDF resulting from the HC-MFM is compared with the PDFs of the ground truth (see figure 7), LF data (LFM, figure 10) and HF data (HFM, figure 11).

Figure 13. (a,b) Joint and marginal PDFs of  $H_{bubble}/h$ at
$H_{bubble}/h$ at  $x/h=2.5$, and (c,d) associated sample posterior distribution of
$x/h=2.5$, and (c,d) associated sample posterior distribution of  $\kappa$ for (a,c) case-A and (b,d) case-B data sets. In (a,b), the contours belong to the joint PDF with associated values specified in the colour bar.
$\kappa$ for (a,c) case-A and (b,d) case-B data sets. In (a,b), the contours belong to the joint PDF with associated values specified in the colour bar.
To conclude the periodic hill example, we can quantify stochastic moments of the QoI as well as the Sobol sensitivity indices (Sobol Reference Sobol2001) due to the uncertainty in  $\alpha$ and
$\alpha$ and  $\gamma$. These UQ measures are integral quantities over the admissible range of the parameters and can be computed using the reference data (all available DNS), LF, HF and MF data sets. Note that for the LF data, the uncertainty in
$\gamma$. These UQ measures are integral quantities over the admissible range of the parameters and can be computed using the reference data (all available DNS), LF, HF and MF data sets. Note that for the LF data, the uncertainty in  $\kappa$ is also taken into account. Noting the parameters
$\kappa$ is also taken into account. Noting the parameters  $\alpha, \gamma$ and
$\alpha, \gamma$ and  $\kappa$ are uniformly distributed and independent from each other, the results summarized in table 1 are obtained using the generalized polynomial chaos expansion (Xiu & Karniadakis Reference Xiu and Karniadakis2002) for the reference and LF data sets, and the Monte Carlo method for the multifidelity cases. All the UQ analyses have been performed using UQit (Rezaeiravesh, Vinuesa & Schlatter Reference Rezaeiravesh, Vinuesa and Schlatter2021). In general, for all cases but the pure LF data, the prediction of the mean and standard deviation of the QoI are close to the reference. For the total Sobol indices, the closest estimates to the reference values is obtained from the HC-MFM applied to case-B, and on the second rank, case-A. Noting the improvement of the Sobol indices accuracy in each of the multifidelity cases compared with the estimates from the associated HF data, the effectiveness of the HC-MFM is once again confirmed. This is an important outcome considering the forward UQ problems and global sensitivity analyses are of most relevance in CFD applications.
$\kappa$ are uniformly distributed and independent from each other, the results summarized in table 1 are obtained using the generalized polynomial chaos expansion (Xiu & Karniadakis Reference Xiu and Karniadakis2002) for the reference and LF data sets, and the Monte Carlo method for the multifidelity cases. All the UQ analyses have been performed using UQit (Rezaeiravesh, Vinuesa & Schlatter Reference Rezaeiravesh, Vinuesa and Schlatter2021). In general, for all cases but the pure LF data, the prediction of the mean and standard deviation of the QoI are close to the reference. For the total Sobol indices, the closest estimates to the reference values is obtained from the HC-MFM applied to case-B, and on the second rank, case-A. Noting the improvement of the Sobol indices accuracy in each of the multifidelity cases compared with the estimates from the associated HF data, the effectiveness of the HC-MFM is once again confirmed. This is an important outcome considering the forward UQ problems and global sensitivity analyses are of most relevance in CFD applications.
3.5. Keeping the RANS parameter fixed
In all the examples in the present study, the fidelity-specific calibration parameters are involved in the multifidelity modelling and posterior distributions for them are learned during the construction of the MFM. But, the methodology behind the HC-MFM described in § 2 is general and flexible to be directly applicable to the cases where the fidelity-specific parameters are kept fixed. To demonstrate this, let us apply the HC-MFM to the example of the periodic hill and use the RANS data at constant values of  $\kappa$, the RANS modelling parameter in (3.7). We use the case-B data sets shown in figure 9 which means having
$\kappa$, the RANS modelling parameter in (3.7). We use the case-B data sets shown in figure 9 which means having  $5$ and
$5$ and  $25$ samples for the DNS and RANS simulations, respectively, in the
$25$ samples for the DNS and RANS simulations, respectively, in the  $\alpha$–
$\alpha$– $\gamma$ space. The validation of the PDF of the QoI,
$\gamma$ space. The validation of the PDF of the QoI,  $H_{bubble}/h$ at
$H_{bubble}/h$ at  $x/h=2.5$, of the HC-MFM for two values of
$x/h=2.5$, of the HC-MFM for two values of  $\kappa$ is represented in figure 14. Adopting
$\kappa$ is represented in figure 14. Adopting  $\kappa =0.433$ (
$\kappa =0.433$ ( $\beta _\infty ^*=0.084$) shows a clear improvement in the predictions compared with the standard value
$\beta _\infty ^*=0.084$) shows a clear improvement in the predictions compared with the standard value  $\kappa =0.4$ (
$\kappa =0.4$ ( $\beta _\infty ^*=0.09$). This observation is consistent with the posterior PDF of
$\beta _\infty ^*=0.09$). This observation is consistent with the posterior PDF of  $\kappa$ in figure 13, where the mode of the distribution is higher than
$\kappa$ in figure 13, where the mode of the distribution is higher than  $0.4$. From this test, not only the validity of the HC-MFM for fixed values of the fidelity-specific parameters is confirmed, but also the fact that such accuracy-controlling parameters should be actively part of the data generation and hence the construction of HC-MFM is emphasized.
$0.4$. From this test, not only the validity of the HC-MFM for fixed values of the fidelity-specific parameters is confirmed, but also the fact that such accuracy-controlling parameters should be actively part of the data generation and hence the construction of HC-MFM is emphasized.

Figure 14. Joint and marginal PDFs of  $H_{bubble}/h$ at
$H_{bubble}/h$ at  $x/h=2.5$ for case-B data sets using fixed values of
$x/h=2.5$ for case-B data sets using fixed values of  $\kappa$ equal to (a)
$\kappa$ equal to (a)  $0.4$ and (b)
$0.4$ and (b)  $0.433$. Note that the PDF of the QoI due to the variation of
$0.433$. Note that the PDF of the QoI due to the variation of  $\alpha$ and
$\alpha$ and  $\gamma$ corresponding to these
$\gamma$ corresponding to these  $\kappa$ values is plotted in figure 10(c,d), respectively.
$\kappa$ values is plotted in figure 10(c,d), respectively.
Another important point is that the good predictive accuracy in figure 14 is obtained despite the poor correlation between the DNS and RANS data. This is because of accurate construction of the model discrepancy term in (3.8) and also accurate estimation of various hyperparameters. It is also noteworthy that the present example is comparable to what is performed by Voet et al. (Reference Voet, Ahlfeld, Gaymann, Laizet and Montomoli2021) using  $7$ DNS and
$7$ DNS and  $30$ RANS data sets using different multifidelity modelling approaches while fixing the value of the coefficients in the RANS closure model. However, a direct comparison between the two studies is not possible since, in the study by Voet et al. (Reference Voet, Ahlfeld, Gaymann, Laizet and Montomoli2021), the plots of the MFM predictions vs reference values of the QoI as in figure 14 were not provided.
$30$ RANS data sets using different multifidelity modelling approaches while fixing the value of the coefficients in the RANS closure model. However, a direct comparison between the two studies is not possible since, in the study by Voet et al. (Reference Voet, Ahlfeld, Gaymann, Laizet and Montomoli2021), the plots of the MFM predictions vs reference values of the QoI as in figure 14 were not provided.
3.6. Impact of replacing the MCMC by a point-estimator
In all the examples presented in this study, the HC-MFM is constructed using the MCMC method to draw samples from the posterior distribution of the hyperparameters and calibration parameters, i.e.  $\boldsymbol {\beta }$ and
$\boldsymbol {\beta }$ and  $\boldsymbol {\theta }$, respectively, in the Bayes formula (2.13). Similarly, to predict the sample distribution of the QoI, direct samples from these posterior distributions are used in the HC-MFM. As an alternative to these sample-based methods within the Bayesian framework, point estimators such as maximum a posteriori probability (MAP) and maximum likelihood estimators (MLE) can be adopted. The point-estimated values are considered to be the representatives of the corresponding distribution. Note that the use of the uniform priors in (2.13) makes the MAP estimations identical to the MLE. Our investigations showed that using point estimators instead of the MCMC method, could deteriorate the accuracy of the HC-MFM predictions, independent from how the LF and HF data are combined.
$\boldsymbol {\theta }$, respectively, in the Bayes formula (2.13). Similarly, to predict the sample distribution of the QoI, direct samples from these posterior distributions are used in the HC-MFM. As an alternative to these sample-based methods within the Bayesian framework, point estimators such as maximum a posteriori probability (MAP) and maximum likelihood estimators (MLE) can be adopted. The point-estimated values are considered to be the representatives of the corresponding distribution. Note that the use of the uniform priors in (2.13) makes the MAP estimations identical to the MLE. Our investigations showed that using point estimators instead of the MCMC method, could deteriorate the accuracy of the HC-MFM predictions, independent from how the LF and HF data are combined.
For instance, according to figure 15, the PDF of the QoIs predicted by the HC-MFM using the MAP estimator is significantly worse than what is given by the MCMC method as shown in figure 13. This is an important message of the present study noting that all previous multifidelity studies in the literature relevant to the fluid flows have been based on using the point estimators, see e.g. Voet et al. (Reference Voet, Ahlfeld, Gaymann, Laizet and Montomoli2021) where the MLE is adopted.

Figure 15. Joint and marginal PDFs of  $H_{bubble}/h$ at
$H_{bubble}/h$ at  $x/h=2.5$ for (a) case-A and (b) case-B data sets. Here, a MAP estimator is used to construct the HC-MFM, in contrast to figure 13 and the rest of the examples in the present study which are obtained using an MCMC method.
$x/h=2.5$ for (a) case-A and (b) case-B data sets. Here, a MAP estimator is used to construct the HC-MFM, in contrast to figure 13 and the rest of the examples in the present study which are obtained using an MCMC method.
The reason for this observation is that, to obtain the best fit for the GP-based models, here the HC-MFM, for a given set of data, the global optimum of the parameters appearing in the model should be found. This, in general, is not an easy task considering the optimization problem can be non-convex with many local optima (Rasmussen & Williams Reference Rasmussen and Williams2005; Gramacy Reference Gramacy2020). Depending on the problem, the point estimators such as MAP and MLE may or may not be successful in finding the global optimum. In contrast, a thorough exploration of the admissible space of the parameters via MCMC samples can rectify the issue. More concrete examples and discussion in this regard can be pursued in an extension of the present study.
4. Summary and conclusions
The Bayesian hierarchical MFM with automatic calibration (HC-MFM) developed by Goh et al. (Reference Goh, Bingham, Holloway, Grosskopf, Kuranz and Rutter2013) is adapted to several examples relevant to wall-bounded turbulent flows. The HC-MFM is general, accurate, applicable to an arbitrary number of fidelity levels and well suited to simulations of turbulent flows since as a part of the MFM construction the fidelity-specific parameters can be automatically calibrated using training data of higher fidelities. This is an important feature noting that in all approaches for simulation of turbulence, different numerical and modelling uncertain parameters can influence the accuracy of the QoIs. Because we used Gaussian processes, the predictions made by the HC-MFM are accompanied by CIs. Moreover, it is possible to incorporate the observational uncertainties in the data at all fidelity levels, and hence perform various UQ analyses for combinations of different types of uncertainties, see Rezaeiravesh et al. (Reference Rezaeiravesh, Vinuesa and Schlatter2022).
Based on the examples, the following main conclusions can be made. (i) For a fixed number of HF training data, the HC-MFM prioritizes the prediction of QoIs so that they become as close as possible to the HF validation data, while the posterior distributions of the calibration parameters are found to be accurate only if sufficiently many LF training data are provided. A similar conclusion was drawn by Goh et al. (Reference Goh, Bingham, Holloway, Grosskopf, Kuranz and Rutter2013) by systematically increasing the amount of both HF and LF data. For the periodic hill subject to geometrical uncertainties, § 3.4.2, fixing the number of the LF data and considering two sets of HF data, the posterior distribution of the RANS (LF) parameter was found to be close to what would be obtained by using all the available HF data. This, again, confirms the importance of providing sufficient LF training data through well exploring the space of the design and calibration parameters. (ii) When there are more than one QoI, the posterior distribution of the calibration parameters may depend on the QoI, see § 3.3. Therefore, the calibration parameters are more numerical than physical and hence, predictions by the HC-MFM for a QoI can be more accurate than the case of a priori calibrating the LF models against HF data of another QoI (an example is calibrating a RANS closure model by the HF data of the lift coefficient, and then using the calibrated model in a simulation aiming for the drag coefficient with optimal accuracy). (iii) As show in § 3.6, the method for estimating the hyperparameters and parameters in the HC-MFM can significantly affect the resulting predictive accuracy. In fact, the MCMC sampling method is shown to result in more accurate predictions compared with a point estimator like MAP. This important point is usually overlooked in most of, if not all, the previous studies regarding the multifidelity modelling in CFD. (iv) If the fidelity-specific calibration parameters are kept fixed, the HC-MFM is still applicable without any need to modifying its general formulation. Obviously, the predictive accuracy of the model will depend on the validity of the value chosen for such parameters when generating the training data. The success of the HC-MFM relies on the accurate modelling of the discrepancy terms between different fidelities, and also the use of the MCMC methods to find optimal values for underlying hyperparameters through exploration of the parameter space.
A user of the HC-MFM should be aware of the fact that the model has no intrinsic knowledge of the physics and what parameter/hyperparameter values are reasonable. Therefore, an assessment of the resulting predictions by the model based on relevant physical constraints is necessary. Furthermore, the choice of kernel functions and priors for the kernel hyperparameters may affect the predictions of the MFM, as discussed in Appendix A. However, the benefit of the Bayesian approach is that any prior knowledge can already be put to use during the set-up of the model, i.e. via the selection of appropriate prior distributions for the parameters. These factors, together with the selection of the training samples, may impact the robustness of the HC-MFM. Therefore, the method should be assessed in further applications in the field of turbulence, with varying complexity and prior physical knowledge.
The present study may be extended in several directions. For instance, in addition to the scalar QoIs, spatio–temporal fields can be considered in the HC-MFM, making it possible to predict full flow fields by combining different fidelities. Such an approach may be particularly interesting as an alternative to the more black-box machine-learning tools when it comes to super-resolution and related methods. Another potential extension is in the combination of the HC-MFM with a Bayesian optimization for CFD applications and turbulent flow problems (see Morita et al. Reference Morita, Rezaeiravesh, Tabatabaei, Vinuesa, Fukagata and Schlatter2022). In this case, the surrogate for the optimizer is based on the MFM, and is thus potentially cheaper to evaluate during the optimization process. In particular, applications in flow control for turbulence, where the main computational time lies in the evaluation of the objective function (i.e. the CFD solver), may greatly benefit from a well-calibrated MFM. Another development can be towards integrating adaptive sampling methods with the HC-MFM, where the decision about a new sample is made through maximizing the predictive accuracy (or minimizing uncertainty) of the model and minimizing the overall computational cost (by choosing a suitable fidelity to sample from).
Acknowledgements
The computations were enabled by resources provided by the Swedish National Infrastructure for Computing (SNIC), partially funded by the Swedish Research Council through grant agreement no. 2018-05973.
Funding
This work has been supported by the EXCELLERAT project, which has received funding from the European Union's Horizon 2020 research and innovation programme under grant agreement no. 823691. Additional funding was provided by the Knut and Alice Wallenberg Foundation (KAW).
Declaration of interests
The authors report no conflict of interest.
Data availability statement
The data from periodic hill RANS simulations are made publicly available on Figshare via the following doi:10.6084/m9.figshare.21440418.
Author contributions
S.R.: conceptualization, methodology, software, formal analysis, writing – original draft. T.M.: designing and performing RANS simulations of the periodic hill case, writing – original draft, writing – review and editing. P.S.: conceptualization, investigation, funding acquisition, writing – review and editing.
Appendix A. Remarks on the techniques used
The purpose of this appendix is to provide a brief overview on some aspects of the Gaussian processes, HC-MFM and Bayesian inference to the extent relevant to the context of the present paper. For further details, a reader is referred to the relevant resources including those cited here.
Further notes on the GPR: according to Rasmussen & Williams (Reference Rasmussen and Williams2005), a GP is defined as ‘a collection of random variables, any finite number of which have a joint Gaussian distribution’. Therefore,  $\hat {f}(\boldsymbol {x})$ in (2.1) is a multivariate Gaussian distribution for any joint sample taken from
$\hat {f}(\boldsymbol {x})$ in (2.1) is a multivariate Gaussian distribution for any joint sample taken from  $\boldsymbol {x}$. The multivariate Gaussian distribution identity remains unchanged, either we define a prior for
$\boldsymbol {x}$. The multivariate Gaussian distribution identity remains unchanged, either we define a prior for  $\hat {f}(\boldsymbol {x})$ (before seeing the data), or after the posterior of
$\hat {f}(\boldsymbol {x})$ (before seeing the data), or after the posterior of  $\hat {f}(\boldsymbol {x})$ is inferred from data. When the prior of
$\hat {f}(\boldsymbol {x})$ is inferred from data. When the prior of  $\hat {f}(\boldsymbol {x})$ is defined, it means we define a structure for
$\hat {f}(\boldsymbol {x})$ is defined, it means we define a structure for  $m(\boldsymbol {x})$ and
$m(\boldsymbol {x})$ and  $k(\boldsymbol {x},\boldsymbol {x}')$. Within such structures, there are various hyperparameters for which we assume prior distributions. For the training data comprising observations
$k(\boldsymbol {x},\boldsymbol {x}')$. Within such structures, there are various hyperparameters for which we assume prior distributions. For the training data comprising observations  $\boldsymbol {Y}=\{y_i\}_{i=1}^n$ at samples
$\boldsymbol {Y}=\{y_i\}_{i=1}^n$ at samples  $\boldsymbol {X}=\{\boldsymbol {x}_i\}_{i=1}^n$, the posterior predictive distribution of
$\boldsymbol {X}=\{\boldsymbol {x}_i\}_{i=1}^n$, the posterior predictive distribution of  $\hat {f}(\boldsymbol {x})$ at the test samples
$\hat {f}(\boldsymbol {x})$ at the test samples  $\boldsymbol {X}^* = \{\boldsymbol {x}^*_i\}_{i=1}^{n^*}$ is multivariate Gaussian with the mean and variance given by the following expressions, respectively (Rasmussen & Williams Reference Rasmussen and Williams2005):
$\boldsymbol {X}^* = \{\boldsymbol {x}^*_i\}_{i=1}^{n^*}$ is multivariate Gaussian with the mean and variance given by the following expressions, respectively (Rasmussen & Williams Reference Rasmussen and Williams2005):
 $$\begin{gather} m(\boldsymbol{Y}^*|\boldsymbol{X}^*,\boldsymbol{X},\boldsymbol{Y}) = \boldsymbol{K}(\boldsymbol{X}^*,\boldsymbol{X})(\boldsymbol{K}(\boldsymbol{X},\boldsymbol{X})+\boldsymbol{K}_N)^{-1}\boldsymbol{Y}^T , \end{gather}$$
$$\begin{gather} m(\boldsymbol{Y}^*|\boldsymbol{X}^*,\boldsymbol{X},\boldsymbol{Y}) = \boldsymbol{K}(\boldsymbol{X}^*,\boldsymbol{X})(\boldsymbol{K}(\boldsymbol{X},\boldsymbol{X})+\boldsymbol{K}_N)^{-1}\boldsymbol{Y}^T , \end{gather}$$ $$\begin{gather}v(\boldsymbol{Y}^*|\boldsymbol{X}^*,\boldsymbol{X},\boldsymbol{Y}) = \boldsymbol{K}(\boldsymbol{X}^*,\boldsymbol{X}^*)-\boldsymbol{K}(\boldsymbol{X}^*,\boldsymbol{X})(\boldsymbol{K}(\boldsymbol{X},\boldsymbol{X})+\boldsymbol{K}_N)^{-1} \boldsymbol{K}(\boldsymbol{X},\boldsymbol{X}^*) . \end{gather}$$
$$\begin{gather}v(\boldsymbol{Y}^*|\boldsymbol{X}^*,\boldsymbol{X},\boldsymbol{Y}) = \boldsymbol{K}(\boldsymbol{X}^*,\boldsymbol{X}^*)-\boldsymbol{K}(\boldsymbol{X}^*,\boldsymbol{X})(\boldsymbol{K}(\boldsymbol{X},\boldsymbol{X})+\boldsymbol{K}_N)^{-1} \boldsymbol{K}(\boldsymbol{X},\boldsymbol{X}^*) . \end{gather}$$
Here, without loss of generality,  $m(\boldsymbol {x})$ is taken to be zero,
$m(\boldsymbol {x})$ is taken to be zero,  $\boldsymbol {K}(\boldsymbol {X},\boldsymbol {X}')$ is a
$\boldsymbol {K}(\boldsymbol {X},\boldsymbol {X}')$ is a  $n\times n'$ matrix where
$n\times n'$ matrix where  $[\boldsymbol {K}(\boldsymbol {X},\boldsymbol {X}')]_{ij}=k(\boldsymbol {x}^{(i)},\boldsymbol {x}'^{(\,j)})$ and
$[\boldsymbol {K}(\boldsymbol {X},\boldsymbol {X}')]_{ij}=k(\boldsymbol {x}^{(i)},\boldsymbol {x}'^{(\,j)})$ and  $\boldsymbol {K}_N$ represents the covariance matrix of the noise. Clearly, in the absence of
$\boldsymbol {K}_N$ represents the covariance matrix of the noise. Clearly, in the absence of  $m(\boldsymbol {x})$, it is the kernel function and the posterior of its hyperparameters which determine the mean and variance of the posterior predictive distribution of
$m(\boldsymbol {x})$, it is the kernel function and the posterior of its hyperparameters which determine the mean and variance of the posterior predictive distribution of  $\hat {f}(\boldsymbol {X}^*)$.
$\hat {f}(\boldsymbol {X}^*)$.
Choice of the kernels: in the absence of  $m(\boldsymbol {x})$, the most influential factor to determine the accuracy of the GP predictions with respect to a given data set is the choice of the kernel function. This is evident from the (A1) and (A2), and the fact that
$m(\boldsymbol {x})$, the most influential factor to determine the accuracy of the GP predictions with respect to a given data set is the choice of the kernel function. This is evident from the (A1) and (A2), and the fact that  $k(\boldsymbol {x},\boldsymbol {x}')$ specifies the degree of similarity or covariance between
$k(\boldsymbol {x},\boldsymbol {x}')$ specifies the degree of similarity or covariance between  $\hat {f}(\boldsymbol {x})$ and
$\hat {f}(\boldsymbol {x})$ and  $\hat {f}(\boldsymbol {x}')$. In each problem, the distribution of the available data in the space of the inputs, or our insights into how the predictions should eventually be in the space of the parameters, can act as directives to select or design kernel functions. For instance, seeing/expecting periodicity in the training data over the space of the inputs, necessitates using periodic kernels. Another example is the case studied in § 3.3, where we knew there should have been a sudden change in the
$\hat {f}(\boldsymbol {x}')$. In each problem, the distribution of the available data in the space of the inputs, or our insights into how the predictions should eventually be in the space of the parameters, can act as directives to select or design kernel functions. For instance, seeing/expecting periodicity in the training data over the space of the inputs, necessitates using periodic kernels. Another example is the case studied in § 3.3, where we knew there should have been a sudden change in the  $C_L$ and
$C_L$ and  $C_D$ curves due to the stall, and because of that we broke the kernel function into two parts introducing the new parameter
$C_D$ curves due to the stall, and because of that we broke the kernel function into two parts introducing the new parameter  $x_{stall}$ and let the HC-MFM learn it along with other parameters/hyperparameters.
$x_{stall}$ and let the HC-MFM learn it along with other parameters/hyperparameters.
If we assume that the function  $\hat {f}(\boldsymbol {x})$ should be smooth (infinitely differentiable), then the quadratic exponentiated kernel can be chosen. To relax the smoothness assumption, the family of the Matern kernels can be considered which have a parameter
$\hat {f}(\boldsymbol {x})$ should be smooth (infinitely differentiable), then the quadratic exponentiated kernel can be chosen. To relax the smoothness assumption, the family of the Matern kernels can be considered which have a parameter  $\nu$ controlling the degree of smoothness of the learned function, see e.g. Rasmussen & Williams (Reference Rasmussen and Williams2005) and Matern (Reference Matern1986) (if
$\nu$ controlling the degree of smoothness of the learned function, see e.g. Rasmussen & Williams (Reference Rasmussen and Williams2005) and Matern (Reference Matern1986) (if  $\nu \to \infty$, then the exponentiated quadratic is recovered). In the examples considered in the manuscript, as the baseline, we have considered the exponentiated quadratic kernel. For the airfoil and periodic hill examples, we observed (through experimentation) that considering the Matern-5/2 for the model discrepancy GPs
$\nu \to \infty$, then the exponentiated quadratic is recovered). In the examples considered in the manuscript, as the baseline, we have considered the exponentiated quadratic kernel. For the airfoil and periodic hill examples, we observed (through experimentation) that considering the Matern-5/2 for the model discrepancy GPs  $\hat {\delta }(\boldsymbol {x})$ and the additive kernels in the airfoil example (see (3.4)) results in slightly more accurate predictions by the HC-MFM compared with the case of using the exponentiated quadratic kernel. Although, we should emphasize that the degree of improvement was not really significant. In the end, it is recalled that there are studies like Duvenaud et al. (Reference Duvenaud, Lloyd, Grosse, Tenenbaum and Zoubin2013); Lloyd et al. (Reference Lloyd, Duvenaud, Grosse, Tenenbaum and Ghahramani2014) where algorithms for automatic selection of the most suitable kernel functions for a given problem have been proposed.
$\hat {\delta }(\boldsymbol {x})$ and the additive kernels in the airfoil example (see (3.4)) results in slightly more accurate predictions by the HC-MFM compared with the case of using the exponentiated quadratic kernel. Although, we should emphasize that the degree of improvement was not really significant. In the end, it is recalled that there are studies like Duvenaud et al. (Reference Duvenaud, Lloyd, Grosse, Tenenbaum and Zoubin2013); Lloyd et al. (Reference Lloyd, Duvenaud, Grosse, Tenenbaum and Ghahramani2014) where algorithms for automatic selection of the most suitable kernel functions for a given problem have been proposed.
Choice of the prior for the (hyper)parameters: any function selected for the  $m(\boldsymbol {x})$ and
$m(\boldsymbol {x})$ and  $k(\boldsymbol {x},\boldsymbol {x}')$ in the GPs in (2.1) and (2.6) relies on a set of hyperparameters, denoted by
$k(\boldsymbol {x},\boldsymbol {x}')$ in the GPs in (2.1) and (2.6) relies on a set of hyperparameters, denoted by  $\boldsymbol {\beta }$ in the text. In addition to these, we have
$\boldsymbol {\beta }$ in the text. In addition to these, we have  $\boldsymbol {\theta }$, the fidelity-specific parameters in the HC-MFM. As a general rule, the prior for any parameter should be chosen such that it only allows for its associated admissible values. Moreover, for any choice for the priors, we should examine the validity of the resulting posteriors (Gelman et al. Reference Gelman, Carlin, Stern, Dunson, Vehtari and Rubin2013). Given these, the particular choice made for the priors of
$\boldsymbol {\theta }$, the fidelity-specific parameters in the HC-MFM. As a general rule, the prior for any parameter should be chosen such that it only allows for its associated admissible values. Moreover, for any choice for the priors, we should examine the validity of the resulting posteriors (Gelman et al. Reference Gelman, Carlin, Stern, Dunson, Vehtari and Rubin2013). Given these, the particular choice made for the priors of  $\boldsymbol {\beta }$ and
$\boldsymbol {\beta }$ and  $\boldsymbol {\theta }$ can be justified as follows.
$\boldsymbol {\theta }$ can be justified as follows.
The uniform priors are non-informative, therefore, they are chosen in the examples in § 3, when the purpose was making the construction of an accurate HC-MFM more challenging, i.e. with providing no prior information about the distribution of the fidelity-specific parameters such as  $\theta$ in the toy-problem example (§ 3.1),
$\theta$ in the toy-problem example (§ 3.1),  ${{\rm \Delta} x^+}$,
${{\rm \Delta} x^+}$,  ${{\rm \Delta} z^+}$,
${{\rm \Delta} z^+}$,  $\kappa$ and
$\kappa$ and  $A^+$ in the channel flow example (§ 3.2) and
$A^+$ in the channel flow example (§ 3.2) and  $\kappa$ in the periodic hill example (§ 3.4). However, we still define the admissible range of a parameter via specifying the bounds of the associated uniform distribution. In general, when there are few training data available, the choice of the uniform priors may have a significant impact on the posteriors, see Gelman et al. (Reference Gelman, Carlin, Stern, Dunson, Vehtari and Rubin2013). Indeed, we clearly observed this, for instance, in the toy-problem example (§ 3.1), where by increasing the number of LF samples, the posterior of
$\kappa$ in the periodic hill example (§ 3.4). However, we still define the admissible range of a parameter via specifying the bounds of the associated uniform distribution. In general, when there are few training data available, the choice of the uniform priors may have a significant impact on the posteriors, see Gelman et al. (Reference Gelman, Carlin, Stern, Dunson, Vehtari and Rubin2013). Indeed, we clearly observed this, for instance, in the toy-problem example (§ 3.1), where by increasing the number of LF samples, the posterior of  $\theta$ changed significantly and became farther from a uniform distribution. Only on one occasion, in the airfoil example (§ 3.3), did we use the Gaussian prior for
$\theta$ changed significantly and became farther from a uniform distribution. Only on one occasion, in the airfoil example (§ 3.3), did we use the Gaussian prior for  $x_{stall}$ and TI as we had a good prior knowledge (from aerodynamics) about the range of the AoAs over which the stall would happen, and the order of the turbulence intensity in the experiments by Bertagnolio (Reference Bertagnolio2008) and the discussion in Gilling et al. (Reference Gilling, Sørensen and Davidson2009). For the noise standard deviation as well as the scaling factor of the kernels (such as
$x_{stall}$ and TI as we had a good prior knowledge (from aerodynamics) about the range of the AoAs over which the stall would happen, and the order of the turbulence intensity in the experiments by Bertagnolio (Reference Bertagnolio2008) and the discussion in Gilling et al. (Reference Gilling, Sørensen and Davidson2009). For the noise standard deviation as well as the scaling factor of the kernels (such as  $\lambda$ in (2.8)), we adopt the half-Cauchy distribution as it only admits non-negative values and has a good performance for the hierarchical models (Gelman Reference Gelman2006; Gelman et al. Reference Gelman, Carlin, Stern, Dunson, Vehtari and Rubin2013). Another type of prior considered in the manuscript is the gamma distribution for the length scale of the GPs’ covariance kernels. This was based on the literature, see e.g. Rasmussen & Williams (Reference Rasmussen and Williams2005) and the fact that the length scales needed to be non-negative.
$\lambda$ in (2.8)), we adopt the half-Cauchy distribution as it only admits non-negative values and has a good performance for the hierarchical models (Gelman Reference Gelman2006; Gelman et al. Reference Gelman, Carlin, Stern, Dunson, Vehtari and Rubin2013). Another type of prior considered in the manuscript is the gamma distribution for the length scale of the GPs’ covariance kernels. This was based on the literature, see e.g. Rasmussen & Williams (Reference Rasmussen and Williams2005) and the fact that the length scales needed to be non-negative.
Extrapolation by HC-MFM: in the examples considered in § 3, the prediction made by the HC-MFM for a QoI in the space of the design parameters  $\boldsymbol {x}$ was within the range covered by the training data at various fidelities. This was an intentional choice, given the range of availability of HF data for the validation of the HC-MFM's predictions and the fact that in §§ 3.3 and 3.4, propagation of uncertainty from
$\boldsymbol {x}$ was within the range covered by the training data at various fidelities. This was an intentional choice, given the range of availability of HF data for the validation of the HC-MFM's predictions and the fact that in §§ 3.3 and 3.4, propagation of uncertainty from  $\boldsymbol {x}$ and sensitivity analysis were targeted. A valid question is about the performance of the HC-MFM in an extrapolation mode, i.e. making prediction for the QoI in
$\boldsymbol {x}$ and sensitivity analysis were targeted. A valid question is about the performance of the HC-MFM in an extrapolation mode, i.e. making prediction for the QoI in  $\boldsymbol {x}$ beyond the range covered by the training data. Note that, for the data at different fidelities, the covered range in
$\boldsymbol {x}$ beyond the range covered by the training data. Note that, for the data at different fidelities, the covered range in  $\boldsymbol {x}$ may be different, which makes the interpretation of extrapolation slightly non-trivial. In any case, the HC-MFM relies on the GPs and therefore its performance when used for extrapolation can be case dependent. This means that if accurate predictions by the model are intended, the choice of the mean and covariance kernels in the GPs should be made in the way that allows for such purpose (Rasmussen & Williams Reference Rasmussen and Williams2005; Gramacy Reference Gramacy2020). The particular optimal choice is, however, problem-dependent and can be the subject of an extension of the present study.
$\boldsymbol {x}$ may be different, which makes the interpretation of extrapolation slightly non-trivial. In any case, the HC-MFM relies on the GPs and therefore its performance when used for extrapolation can be case dependent. This means that if accurate predictions by the model are intended, the choice of the mean and covariance kernels in the GPs should be made in the way that allows for such purpose (Rasmussen & Williams Reference Rasmussen and Williams2005; Gramacy Reference Gramacy2020). The particular optimal choice is, however, problem-dependent and can be the subject of an extension of the present study.
Appendix B. The PDF of a set of standard distributions
For the prior distribution of the parameters and hyperparameters of the MFMs in § 3, a set of standard distributions was used. table 2 summarizes the PDF and associated support of such distributions.
Table 2. The PDF and associated support of the standard distributions used in § 3.




























































































































 Open access
Open access