




1. Introduction
The propagation of sound through an otherwise steady mean flow has many important applications. One such application is predicting and optimizing aircraft engine noise. With aircraft noise being subjected to ever increasing restrictions, being able to model this noise successfully becomes increasingly important. In particular, aircraft engine noise at take-off depends critically on the sound-absorbing performance of acoustic liners. Unfortunately, acoustic liner performance in the presence of a steady mean flow is poorly predicted by existing theory, as demonstrated by comparisons to laboratory experiments (Renou & Aurégan Reference Renou and Aurégan2011; Spillere et al. Reference Spillere, Bonomo, Cordioli and Brambley2020). The theory is equally applicable to any situation with small perturbations to an otherwise steady mean flow along a non-rigid boundary – for example, the stability analysis of flow over a deformable surface.
The behaviour of sound in an otherwise steady mean flow is usually modelled using the linearized Euler equations. Non-rigid boundaries, such as the acoustic liners used in aircraft engines, are usually modelled using an impedance boundary condition, where a disturbance with oscillating pressure  ${\rm Re}(p\exp \{\mathrm {i}\omega t\})$ leads to an oscillating normal boundary velocity
${\rm Re}(p\exp \{\mathrm {i}\omega t\})$ leads to an oscillating normal boundary velocity  ${\rm Re}(v\exp \{\mathrm {i}\omega t\})$ given by
${\rm Re}(v\exp \{\mathrm {i}\omega t\})$ given by  $p = Z(\omega )\,v$. Such impedance boundary conditions are well understood for a mean flow that satisfies no-slip at the boundary. Often, however, we use a simplified model where the mean flow does not satisfy no-slip at the boundary – for example, uniform axial flow in a duct. For slipping mean flows, it is known that the impedance boundary condition must be modified. A common modified boundary condition is the Myers, or Ingard–Myers, boundary condition (Ingard Reference Ingard1959; Myers Reference Myers1980). This boundary condition is known to be the correct limiting behaviour for an inviscid mean flow boundary layer in the limit that the boundary layer thickness tends to zero (Eversman & Beckemeyer Reference Eversman and Beckemeyer1972; Tester Reference Tester1973). However, this boundary condition, when applied in the time domain, is ill-posed (Brambley Reference Brambley2009). Several alternative boundary conditions have been suggested (Brambley Reference Brambley2011b; Khamis & Brambley Reference Khamis and Brambley2017; Schulz et al. Reference Schulz, Weng, Bake, Enghardt and Ronneberger2017; Aurégan Reference Aurégan2018), which each attempt to include more relevant physics, including the effect of the mean flow boundary layer and the effect of viscosity. However, these boundary conditions come with their own complications, including the need to fit further free parameters, and as yet none have been made to agree with laboratory experiments (Spillere et al. Reference Spillere, Bonomo, Cordioli and Brambley2020).
$p = Z(\omega )\,v$. Such impedance boundary conditions are well understood for a mean flow that satisfies no-slip at the boundary. Often, however, we use a simplified model where the mean flow does not satisfy no-slip at the boundary – for example, uniform axial flow in a duct. For slipping mean flows, it is known that the impedance boundary condition must be modified. A common modified boundary condition is the Myers, or Ingard–Myers, boundary condition (Ingard Reference Ingard1959; Myers Reference Myers1980). This boundary condition is known to be the correct limiting behaviour for an inviscid mean flow boundary layer in the limit that the boundary layer thickness tends to zero (Eversman & Beckemeyer Reference Eversman and Beckemeyer1972; Tester Reference Tester1973). However, this boundary condition, when applied in the time domain, is ill-posed (Brambley Reference Brambley2009). Several alternative boundary conditions have been suggested (Brambley Reference Brambley2011b; Khamis & Brambley Reference Khamis and Brambley2017; Schulz et al. Reference Schulz, Weng, Bake, Enghardt and Ronneberger2017; Aurégan Reference Aurégan2018), which each attempt to include more relevant physics, including the effect of the mean flow boundary layer and the effect of viscosity. However, these boundary conditions come with their own complications, including the need to fit further free parameters, and as yet none have been made to agree with laboratory experiments (Spillere et al. Reference Spillere, Bonomo, Cordioli and Brambley2020).
In light of this difficulty with boundary conditions in slipping mean flow, one may instead consider only mean flows  $U(r)$ that satisfy no-slip at the boundary (e.g. Weng et al. Reference Weng, Schulz, Ronneberger, Enghardt and Bake2017). Doing so, however, involves solving for the sound in a strongly varying mean flow, which is especially taxing when the boundary layers are particularly thin. Numerically resolving the sound in thin boundary layers requires a fine resolution, which then also requires a small time step owing to the Courant–Friedrichs–Lewy (CFL) condition. Progress may be made analytically by considering the simplified situation of a straight rectilinear or cylindrical duct containing axial mean flow (as depicted later, in figure 1). By linearizing the Euler equations about this steady mean flow and assuming
$U(r)$ that satisfy no-slip at the boundary (e.g. Weng et al. Reference Weng, Schulz, Ronneberger, Enghardt and Bake2017). Doing so, however, involves solving for the sound in a strongly varying mean flow, which is especially taxing when the boundary layers are particularly thin. Numerically resolving the sound in thin boundary layers requires a fine resolution, which then also requires a small time step owing to the Courant–Friedrichs–Lewy (CFL) condition. Progress may be made analytically by considering the simplified situation of a straight rectilinear or cylindrical duct containing axial mean flow (as depicted later, in figure 1). By linearizing the Euler equations about this steady mean flow and assuming  $\exp \{\mathrm {i}\omega t - \mathrm {i} kx\}$ dependence, one eventually arrives at the Pridmore-Brown equation (2.5), a second-order linear ordinary differential equation for the pressure perturbation within the duct due to Pridmore-Brown (Reference Pridmore-Brown1958). The Pridmore-Brown equation has been the subject of much analysis (e.g. Mungur & Gladwell Reference Mungur and Gladwell1969; Ko Reference Ko1972; Swinbanks Reference Swinbanks1975; Nagel & Brand Reference Nagel and Brand1982; Brambley, Darau & Rienstra Reference Brambley, Darau and Rienstra2012a; Rienstra Reference Rienstra2020), owing to its complexity. One complexity is that treating the frequency
$\exp \{\mathrm {i}\omega t - \mathrm {i} kx\}$ dependence, one eventually arrives at the Pridmore-Brown equation (2.5), a second-order linear ordinary differential equation for the pressure perturbation within the duct due to Pridmore-Brown (Reference Pridmore-Brown1958). The Pridmore-Brown equation has been the subject of much analysis (e.g. Mungur & Gladwell Reference Mungur and Gladwell1969; Ko Reference Ko1972; Swinbanks Reference Swinbanks1975; Nagel & Brand Reference Nagel and Brand1982; Brambley, Darau & Rienstra Reference Brambley, Darau and Rienstra2012a; Rienstra Reference Rienstra2020), owing to its complexity. One complexity is that treating the frequency  $\omega$ as known and solving for the axial wavenumber
$\omega$ as known and solving for the axial wavenumber  $k$ as the eigenvalue, the Pridmore-Brown equation is not Sturm–Liouville and results in a nonlinear eigenvalue problem for
$k$ as the eigenvalue, the Pridmore-Brown equation is not Sturm–Liouville and results in a nonlinear eigenvalue problem for  $k$. A second complexity is that the Pridmore-Brown equation possesses a regular singularity, referred to as a critical layer or continuous spectrum. Despite these difficulties, eigenfunction expansions using eigenfunctions of the Pridmore-Brown equation are used frequently, with the eigenfunctions assumed to form a complete basis (despite the problem being non-self-adjoint) and the effect of the critical layer ignored (e.g. Brooks & McAlpine Reference Brooks and McAlpine2007; Olivieri, McAlpine & Astley Reference Olivieri, McAlpine and Astley2010; Oppeneer, Rienstra & Sijtsma Reference Oppeneer, Rienstra and Sijtsma2016; Rienstra Reference Rienstra2021).
$k$. A second complexity is that the Pridmore-Brown equation possesses a regular singularity, referred to as a critical layer or continuous spectrum. Despite these difficulties, eigenfunction expansions using eigenfunctions of the Pridmore-Brown equation are used frequently, with the eigenfunctions assumed to form a complete basis (despite the problem being non-self-adjoint) and the effect of the critical layer ignored (e.g. Brooks & McAlpine Reference Brooks and McAlpine2007; Olivieri, McAlpine & Astley Reference Olivieri, McAlpine and Astley2010; Oppeneer, Rienstra & Sijtsma Reference Oppeneer, Rienstra and Sijtsma2016; Rienstra Reference Rienstra2021).

Figure 1. A cross sectional view of a cylindrical duct with lined walls containing sheared axial flow.  $\rho _0(r)$ is the mean flow density (here taken constant), and
$\rho _0(r)$ is the mean flow density (here taken constant), and  $U(r)$ is the mean flow velocity, here taken to be uniform outside a boundary layer of width
$U(r)$ is the mean flow velocity, here taken to be uniform outside a boundary layer of width  $h$.
$h$.  $Z$ is the boundary impedance and defines the boundary condition at the wall of the duct.
$Z$ is the boundary impedance and defines the boundary condition at the wall of the duct.
The lack of completeness of the modal solutions of the Pridmore-Brown equation motivates the investigation of the Green's function solution. The Green's function is the solution of the governing equations subject to a point forcing; for example, a point mass source leads to the right-hand-side of (2.5). The Green's function may be used to construct the solution of the governing equations subject to any arbitrary forcing; hence, the Green's function is capable of being used to express any solution of the governing equations, in contrast to a modal eigenvalue expansion, which can only express an arbitrary solution if the modal basis is complete. The Green's function is also worth considering on its own merits without reference to a particular forcing, since if the governing equations are capable of exhibiting a particular feature (such as instability, focusing, perfect reflection, etc.), then the Green's function must also exhibit that feature. The Green's function is also used in various approximation techniques (e.g. Brambley, Davis & Peake Reference Brambley, Davis and Peake2012b; Posson & Peake Reference Posson and Peake2013; Mathews & Peake Reference Mathews and Peake2018b). For this reason, the Green's function has been constructed for a variety of acoustical situations (e.g. Rienstra & Tester Reference Rienstra and Tester2008; Brambley et al. Reference Brambley, Darau and Rienstra2012a; Mathews & Peake Reference Mathews and Peake2017, Reference Mathews and Peake2018a). In particular, the Green's function solution of the Pridmore-Brown equation naturally includes the critical layer.
The critical layer, or continuous spectrum, is a singularity of the linearized Euler equations occurring when the phase velocity of the perturbation,  $\omega /k$, is equal to the local fluid velocity of the steady flow,
$\omega /k$, is equal to the local fluid velocity of the steady flow,  $U(r_c)$, for some critical radius
$U(r_c)$, for some critical radius  $r_c$. Because the phase speed is equal to the flow speed, the effect of the critical layer may be thought of as being convected with the mean flow, and therefore as hydrodynamic in nature (Case Reference Case1960; Rienstra, Darau & Brambley Reference Rienstra, Darau and Brambley2013). For swirling flows, the critical layer is known to lead to algebraically growing instabilities (Golubev & Atassi Reference Golubev and Atassi1996; Tam & Auriault Reference Tam and Auriault1998; Heaton & Peake Reference Heaton and Peake2006). For the Pridmore-Brown equation, the critical layer is currently thought to lead to algebraically decaying disturbances, although publications differ on the exact nature of the decay. For example, Swinbanks (Reference Swinbanks1975) predicted a disturbance of constant amplitude plus a disturbance with
$r_c$. Because the phase speed is equal to the flow speed, the effect of the critical layer may be thought of as being convected with the mean flow, and therefore as hydrodynamic in nature (Case Reference Case1960; Rienstra, Darau & Brambley Reference Rienstra, Darau and Brambley2013). For swirling flows, the critical layer is known to lead to algebraically growing instabilities (Golubev & Atassi Reference Golubev and Atassi1996; Tam & Auriault Reference Tam and Auriault1998; Heaton & Peake Reference Heaton and Peake2006). For the Pridmore-Brown equation, the critical layer is currently thought to lead to algebraically decaying disturbances, although publications differ on the exact nature of the decay. For example, Swinbanks (Reference Swinbanks1975) predicted a disturbance of constant amplitude plus a disturbance with  $O(x^{-3})$ decay for a point source, and
$O(x^{-3})$ decay for a point source, and  $O(x^{-1})$ decay for a distributed source, although exact formulae for these disturbances are not given. Swinbanks (Reference Swinbanks1975, p. 62) goes on to argue that the constant amplitude disturbance would not be present when the disturbance is caused ‘by moving the surface of a solid body’. In contrast, Félix & Pagneux (Reference Félix and Pagneux2007) demonstrated numerically, for a point source in a parabolic mean flow, a decay rate of
$O(x^{-1})$ decay for a distributed source, although exact formulae for these disturbances are not given. Swinbanks (Reference Swinbanks1975, p. 62) goes on to argue that the constant amplitude disturbance would not be present when the disturbance is caused ‘by moving the surface of a solid body’. In contrast, Félix & Pagneux (Reference Félix and Pagneux2007) demonstrated numerically, for a point source in a parabolic mean flow, a decay rate of  $O(x^{-1})$. More recently, Brambley et al. (Reference Brambley, Darau and Rienstra2012a) gave an explicit analytic solution for the critical layer far-field response for a mean flow
$O(x^{-1})$. More recently, Brambley et al. (Reference Brambley, Darau and Rienstra2012a) gave an explicit analytic solution for the critical layer far-field response for a mean flow  $U(r)$ that is constant in the centre of the duct, and then varies linearly in a ‘boundary layer’ region to zero at the duct walls. Locating a point source at a radius
$U(r)$ that is constant in the centre of the duct, and then varies linearly in a ‘boundary layer’ region to zero at the duct walls. Locating a point source at a radius  $r_0$, they found that the pressure perturbation from the critical layer at a radius
$r_0$, they found that the pressure perturbation from the critical layer at a radius  $r$ consisted of three distinct components with phase velocities
$r$ consisted of three distinct components with phase velocities  $U(0)$,
$U(0)$,  $U(r)$ and
$U(r)$ and  $U(r_0)$, each with different decay rates. However, Brambley et al. (Reference Brambley, Darau and Rienstra2012a) chose a rather special mean flow profile. In particular, the critical layer is usually caused by a non-zero second derivative of the mean flow profile,
$U(r_0)$, each with different decay rates. However, Brambley et al. (Reference Brambley, Darau and Rienstra2012a) chose a rather special mean flow profile. In particular, the critical layer is usually caused by a non-zero second derivative of the mean flow profile,  $U''(r)$, but for the constant-then-linear mean flow,
$U''(r)$, but for the constant-then-linear mean flow,  $U''(r)$ either is identically zero or has a delta function discontinuity; in the constant-then-linear case, Brambley et al. (Reference Brambley, Darau and Rienstra2012a) instead attributed the critical layer to the cylindrical geometry.
$U''(r)$ either is identically zero or has a delta function discontinuity; in the constant-then-linear case, Brambley et al. (Reference Brambley, Darau and Rienstra2012a) instead attributed the critical layer to the cylindrical geometry.
In many cases, the effect of the critical layer is negligible in comparison with the modal sum of the acoustics modes. However, when all acoustic modes are cut-off and non-propagating, the effect of the critical layer will be dominant. Moreover, Brambley (Reference Brambley2013, figure 6) showed that a mode representing a hydrodynamic instability could interact with the critical layer, although this was not seen for a constant-then-linear mean flow profile.
Since the critical layer is a singularity of the Pridmore-Brown equation, traditional numerical methods are particularly inaccurate near the critical layer. This often manifests as a collection of spurious numerical modes being located along the critical layer. In contrast, previous studies have used a Frobenius expansion about the singular point  $r=r_c$ (e.g. Heaton & Peake Reference Heaton and Peake2006; Campos & Kobayashi Reference Campos and Kobayashi2009; Brambley et al. Reference Brambley, Darau and Rienstra2012a). This technique both gives increasing accuracy as the critical layer is approached, and allows analytical continuation behind the critical layer branch cut. For example, Brambley et al. (Reference Brambley, Darau and Rienstra2012a, figure 10) found a previously unknown mode close to the critical layer that was unable to be resolved numerically using more traditional finite differences. One complication of the Frobenius series, however, is that, much like a power series, it has an associated radius of convergence. For the constant-then-linear mean flow Frobenius expansion (Brambley et al. Reference Brambley, Darau and Rienstra2012a), this did not prove a problem, as the radius of convergence covered the region of interest in all cases that were considered. For general flow profiles, this will not be the case, and a solution covering the entire region of interest will involve multiple Frobenius expansions with overlapping radii of convergence; this will turn out to be the case here. By matching two different expansions in a region where both converge, a hybrid solution may be constructed that spans the whole region of interest.
$r=r_c$ (e.g. Heaton & Peake Reference Heaton and Peake2006; Campos & Kobayashi Reference Campos and Kobayashi2009; Brambley et al. Reference Brambley, Darau and Rienstra2012a). This technique both gives increasing accuracy as the critical layer is approached, and allows analytical continuation behind the critical layer branch cut. For example, Brambley et al. (Reference Brambley, Darau and Rienstra2012a, figure 10) found a previously unknown mode close to the critical layer that was unable to be resolved numerically using more traditional finite differences. One complication of the Frobenius series, however, is that, much like a power series, it has an associated radius of convergence. For the constant-then-linear mean flow Frobenius expansion (Brambley et al. Reference Brambley, Darau and Rienstra2012a), this did not prove a problem, as the radius of convergence covered the region of interest in all cases that were considered. For general flow profiles, this will not be the case, and a solution covering the entire region of interest will involve multiple Frobenius expansions with overlapping radii of convergence; this will turn out to be the case here. By matching two different expansions in a region where both converge, a hybrid solution may be constructed that spans the whole region of interest.
Here, we use the Frobenius expansion method as described by Brambley et al. (Reference Brambley, Darau and Rienstra2012a), and apply it to a mean flow that is constant in the centre of the duct and then varies quadratically within a boundary layer to satisfy no-slip at the wall. As well as being more realistic than the constant-then-linear profile considered by Brambley et al. (Reference Brambley, Darau and Rienstra2012a), this mean flow profile is twice differentiable, allowing  $U''(r)$ to enter the analysis, and as such we expect the results to be more representative of an arbitrary mean flow profile. The Frobenius expansion is derived in § 2, along with a derivation of the Pridmore-Brown equation by spatially Fourier transforming the linearized Euler equations. The Frobenius expansion is then used in § 3 to derive the Green's function for a point mass source, including inverting the spatial Fourier transform and investigating the far-field behaviour. Results are presented in § 4 by evaluating numerically the Frobenius expansions and the Green's function. These results are compared against previous results, particularly against the predictions by Swinbanks (Reference Swinbanks1975) and the constant-then-linear results by Brambley et al. (Reference Brambley, Darau and Rienstra2012a). Finally, the implications of this work are discussed, and areas for further research highlighted, in § 5.
$U''(r)$ to enter the analysis, and as such we expect the results to be more representative of an arbitrary mean flow profile. The Frobenius expansion is derived in § 2, along with a derivation of the Pridmore-Brown equation by spatially Fourier transforming the linearized Euler equations. The Frobenius expansion is then used in § 3 to derive the Green's function for a point mass source, including inverting the spatial Fourier transform and investigating the far-field behaviour. Results are presented in § 4 by evaluating numerically the Frobenius expansions and the Green's function. These results are compared against previous results, particularly against the predictions by Swinbanks (Reference Swinbanks1975) and the constant-then-linear results by Brambley et al. (Reference Brambley, Darau and Rienstra2012a). Finally, the implications of this work are discussed, and areas for further research highlighted, in § 5.
2. Problem formulation and homogeneous solutions
2.1. Constructing the Pridmore-Brown equation
The governing equations for what follows are the Euler equations with a mass source  $q$:
$q$:
 \begin{equation} \frac{\partial {\rho} }{\partial {t} }+\boldsymbol{\nabla}\boldsymbol{\cdot}(\rho \boldsymbol{u})=q, \quad \rho\,\frac{{\rm D} {\boldsymbol{u}} }{{\rm D} {t} }={-}\boldsymbol{\nabla}p, \quad \frac{{\rm D} {p} }{{\rm D} {t} }={c^{2}}\,\frac{{\rm D} {\rho} }{{\rm D} {t} }, \end{equation}
\begin{equation} \frac{\partial {\rho} }{\partial {t} }+\boldsymbol{\nabla}\boldsymbol{\cdot}(\rho \boldsymbol{u})=q, \quad \rho\,\frac{{\rm D} {\boldsymbol{u}} }{{\rm D} {t} }={-}\boldsymbol{\nabla}p, \quad \frac{{\rm D} {p} }{{\rm D} {t} }={c^{2}}\,\frac{{\rm D} {\rho} }{{\rm D} {t} }, \end{equation}
where  $\boldsymbol {u}$ is the fluid velocity,
$\boldsymbol {u}$ is the fluid velocity,  $p$ is the pressure,
$p$ is the pressure,  $\rho$ is the density, and
$\rho$ is the density, and  $c^{2} = {\partial p}/{\partial \rho }|_s$ is the square of the sound speed. In what follows, we take the mass source
$c^{2} = {\partial p}/{\partial \rho }|_s$ is the square of the sound speed. In what follows, we take the mass source  $q$ to be a small time-harmonic point mass source. In cylindrical coordinates
$q$ to be a small time-harmonic point mass source. In cylindrical coordinates  $(x,r,\theta )$, with a suitable choice of origin, this mass source
$(x,r,\theta )$, with a suitable choice of origin, this mass source  $q$ may in general be taken as
$q$ may in general be taken as
 \begin{equation} q = {\rm Re}\left(\frac{\epsilon}{r_0}\,\delta(x)\,\delta(\theta)\, \delta(r-r_0)\exp\{\mathrm{i}\omega t\}\right), \end{equation}
\begin{equation} q = {\rm Re}\left(\frac{\epsilon}{r_0}\,\delta(x)\,\delta(\theta)\, \delta(r-r_0)\exp\{\mathrm{i}\omega t\}\right), \end{equation}
where  $\epsilon$ is the small amplitude,
$\epsilon$ is the small amplitude,  $\omega$ is the frequency, and the
$\omega$ is the frequency, and the  $1/r_0$ term comes from writing a unit amplitude point source in cylindrical coordinates. We expand each variable in powers of
$1/r_0$ term comes from writing a unit amplitude point source in cylindrical coordinates. We expand each variable in powers of  $\epsilon$:
$\epsilon$:
 \begin{equation} \left.\begin{array}{c@{}} \rho=\rho_0(r)+{\rm Re}(\epsilon\hat{\rho}\,{\rm e}^{\mathrm{i}\omega t}) + O(\epsilon^{2}), \quad p=p_0+{\rm Re}(\epsilon \hat{p}\, {\rm e}^{\mathrm{i}\omega t}) + O(\epsilon^{2}),\\ \boldsymbol{u}=U(r)\,\boldsymbol{e_x} + {\rm Re}(\epsilon (\hat{u}, \hat{v}, \hat{w} )\, {\rm e}^{\mathrm{i}\omega t}) + O(\epsilon^{2}), \quad c^{2} = c_0^{2}(r) + O(\epsilon), \end{array}\right\} \end{equation}
\begin{equation} \left.\begin{array}{c@{}} \rho=\rho_0(r)+{\rm Re}(\epsilon\hat{\rho}\,{\rm e}^{\mathrm{i}\omega t}) + O(\epsilon^{2}), \quad p=p_0+{\rm Re}(\epsilon \hat{p}\, {\rm e}^{\mathrm{i}\omega t}) + O(\epsilon^{2}),\\ \boldsymbol{u}=U(r)\,\boldsymbol{e_x} + {\rm Re}(\epsilon (\hat{u}, \hat{v}, \hat{w} )\, {\rm e}^{\mathrm{i}\omega t}) + O(\epsilon^{2}), \quad c^{2} = c_0^{2}(r) + O(\epsilon), \end{array}\right\} \end{equation}
where  $p_0$ is necessarily a constant in order that the steady state should satisfy the Euler equations, and it turns out that
$p_0$ is necessarily a constant in order that the steady state should satisfy the Euler equations, and it turns out that  $c^{2}$ is needed only to leading order in what follows. Without loss of generality, all perturbations are expanded using a Fourier series in
$c^{2}$ is needed only to leading order in what follows. Without loss of generality, all perturbations are expanded using a Fourier series in  $\theta$ and a Fourier transform in
$\theta$ and a Fourier transform in  $x$. As a result, the pressure perturbation is given as
$x$. As a result, the pressure perturbation is given as
 \begin{equation} \hat{p}(x,r,\theta)=\frac{1}{2{\rm \pi}} \sum_{m={-}\infty}^{\infty} \,\mathrm{e}^{-\mathrm{i} m \theta} \int_{-\infty}^{\infty} \tilde{p}(r;k,m,\omega)\, \mathrm{e}^{-\mathrm{i} k x}\,\mathrm{d} k, \end{equation}
\begin{equation} \hat{p}(x,r,\theta)=\frac{1}{2{\rm \pi}} \sum_{m={-}\infty}^{\infty} \,\mathrm{e}^{-\mathrm{i} m \theta} \int_{-\infty}^{\infty} \tilde{p}(r;k,m,\omega)\, \mathrm{e}^{-\mathrm{i} k x}\,\mathrm{d} k, \end{equation}
and similarly for the density  $\hat {\rho }$ and the velocity components
$\hat {\rho }$ and the velocity components  $\hat {u}$,
$\hat {u}$,  $\hat {v}$ and
$\hat {v}$ and  $\hat {w}$. Substituting these into the Euler equations (2.1a–c), and linearizing by ignoring terms of
$\hat {w}$. Substituting these into the Euler equations (2.1a–c), and linearizing by ignoring terms of  $O(\epsilon ^{2})$ or smaller, each of
$O(\epsilon ^{2})$ or smaller, each of  $\tilde {\rho }$,
$\tilde {\rho }$,  $\tilde {u}$,
$\tilde {u}$,  $\tilde {w}$ and finally
$\tilde {w}$ and finally  $\tilde {v}$ may be eliminated, to leave a second-order ordinary differential equation in the radial coordinate
$\tilde {v}$ may be eliminated, to leave a second-order ordinary differential equation in the radial coordinate  $r$ for
$r$ for  $\tilde {p}$:
$\tilde {p}$:
 \begin{gather} \tilde{p}^{\prime\prime}+\left( {\frac{2k U^{\prime}}{\omega-U(r)\,k}+ \frac{1}{r}-\frac{\rho^{\prime}_0}{\rho_0}} \right)\tilde{p}^{\prime} + \left( {\frac{(\omega-U(r)\,k)^{2}}{c_0^{2}}-k^{2}-\frac{m^{2}}{r^{2}}} \right) \tilde{p}\nonumber\\ \quad =\frac{\omega-U(r_0)\,k}{2\mathrm{i}{\rm \pi} r_0}\,\delta(r-r_0), \end{gather}
\begin{gather} \tilde{p}^{\prime\prime}+\left( {\frac{2k U^{\prime}}{\omega-U(r)\,k}+ \frac{1}{r}-\frac{\rho^{\prime}_0}{\rho_0}} \right)\tilde{p}^{\prime} + \left( {\frac{(\omega-U(r)\,k)^{2}}{c_0^{2}}-k^{2}-\frac{m^{2}}{r^{2}}} \right) \tilde{p}\nonumber\\ \quad =\frac{\omega-U(r_0)\,k}{2\mathrm{i}{\rm \pi} r_0}\,\delta(r-r_0), \end{gather} \begin{gather}\text{with}\quad\tilde{v} = \frac{\mathrm{i}\tilde{p}'}{\rho_0(\omega - Uk)}, \end{gather}
\begin{gather}\text{with}\quad\tilde{v} = \frac{\mathrm{i}\tilde{p}'}{\rho_0(\omega - Uk)}, \end{gather}
where a prime denotes the derivative with respect to  $r$. This is the Pridmore-Brown (Reference Pridmore-Brown1958) equation for a point mass source, written in cylindrical coordinates.
$r$. This is the Pridmore-Brown (Reference Pridmore-Brown1958) equation for a point mass source, written in cylindrical coordinates.
One boundary condition to (2.5) is regularity at  $r=0$. The singular solution behaves, for
$r=0$. The singular solution behaves, for  $m\neq 0$, as
$m\neq 0$, as  $O(r^{-|m|})$ as
$O(r^{-|m|})$ as  $r\to 0$, and the regular solution behaves as
$r\to 0$, and the regular solution behaves as  $O(r^{|m|})$. For
$O(r^{|m|})$. For  $m=0$, the singular solution behaves as
$m=0$, the singular solution behaves as  $O(\log r)$, while the regular solution behaves as
$O(\log r)$, while the regular solution behaves as  $O(1)$. Eliminating the singular solution is therefore possible using the boundary conditions at
$O(1)$. Eliminating the singular solution is therefore possible using the boundary conditions at  $r=0$:
$r=0$:
 \begin{equation} \tilde{p}(0) = 0 \text{ for }m\not=0, \quad \tilde{p}^{\prime}(0)=0 \text{ for }m=0. \end{equation}
\begin{equation} \tilde{p}(0) = 0 \text{ for }m\not=0, \quad \tilde{p}^{\prime}(0)=0 \text{ for }m=0. \end{equation}
To model sound within a straight cylindrical duct of radius  $r=a$, we take the other boundary condition to be the impedance boundary condition at
$r=a$, we take the other boundary condition to be the impedance boundary condition at  $r=a$:
$r=a$:
 \begin{equation} \tilde{p}({a}) = Z(\omega)\,\tilde{v}({a}) \iff \tilde{p}^{\prime}({a})={-}\frac{\mathrm{i}\omega{\rho_0}}{Z}\,\tilde{p}({a}), \end{equation}
\begin{equation} \tilde{p}({a}) = Z(\omega)\,\tilde{v}({a}) \iff \tilde{p}^{\prime}({a})={-}\frac{\mathrm{i}\omega{\rho_0}}{Z}\,\tilde{p}({a}), \end{equation}
where  $Z(\omega )$ is the impedance of the duct wall, and the two expressions are equivalent in light of (2.5b). A hard wall corresponds to
$Z(\omega )$ is the impedance of the duct wall, and the two expressions are equivalent in light of (2.5b). A hard wall corresponds to  $Z \to \infty$, and hence to
$Z \to \infty$, and hence to  $\tilde {v}(a) = 0$, or equivalently to
$\tilde {v}(a) = 0$, or equivalently to  $\tilde {p}'(a) = 0$.
$\tilde {p}'(a) = 0$.
In what follows, we make the simplifying assumption of a constant density  $\rho _0(r)$. This is a homentropic assumption, and it implies that
$\rho _0(r)$. This is a homentropic assumption, and it implies that  $c_0(r)$ is also constant. We may then non-dimensionalize speeds by the sound speed
$c_0(r)$ is also constant. We may then non-dimensionalize speeds by the sound speed  $c_0$, densities by
$c_0$, densities by  $\rho _0$, and distances by the duct radius
$\rho _0$, and distances by the duct radius  $a$. Note that this places the impedance boundary condition in non-dimensional terms at
$a$. Note that this places the impedance boundary condition in non-dimensional terms at  $r=1$. We also assume a flow profile
$r=1$. We also assume a flow profile  $U(r)$ that is uniform, except within a boundary layer of width
$U(r)$ that is uniform, except within a boundary layer of width  $h$ where it varies quadratically:
$h$ where it varies quadratically:
 \begin{equation} U(r)=\begin{cases}M, & 0\leq r\leq 1-h, \\ M\left(1-\left(1-\dfrac{1-r}{h}\right)^{2}\right), & 1-h\leq r \leq 1.\end{cases} \end{equation}
\begin{equation} U(r)=\begin{cases}M, & 0\leq r\leq 1-h, \\ M\left(1-\left(1-\dfrac{1-r}{h}\right)^{2}\right), & 1-h\leq r \leq 1.\end{cases} \end{equation}
With the non-dimensionalization of velocities by  $c_0$,
$c_0$,  $M$ here is the duct centreline Mach number. This situation is depicted schematically in figure 1.
$M$ here is the duct centreline Mach number. This situation is depicted schematically in figure 1.
In order to solve the Pridmore-Brown equation (2.5a), we first consider solutions of the homogeneous form
 \begin{equation} \tilde{p}^{\prime\prime}+\left( {\frac{2k U^{\prime}}{\omega-U(r)\,k}+ \frac{1}{r}} \right)\tilde{p}^{\prime}+\left( {(\omega-U(r)\,k)^{2}-k^{2}-\frac{m^{2}}{r^{2}}} \right)\tilde{p}=0. \end{equation}
\begin{equation} \tilde{p}^{\prime\prime}+\left( {\frac{2k U^{\prime}}{\omega-U(r)\,k}+ \frac{1}{r}} \right)\tilde{p}^{\prime}+\left( {(\omega-U(r)\,k)^{2}-k^{2}-\frac{m^{2}}{r^{2}}} \right)\tilde{p}=0. \end{equation}2.2. Homogeneous solutions within the region of uniform flow
Within the region of uniform flow, the homogeneous Pridmore-Brown equation (2.9) reduces to
 \begin{equation} \tilde{p}^{\prime\prime}+\frac{1}{r}\tilde{p}^{\prime}+\left( {(\omega-Mk)^{2}-k^{2}- \frac{m^{2}}{r^{2}}} \right)\tilde{p}=0. \end{equation}
\begin{equation} \tilde{p}^{\prime\prime}+\frac{1}{r}\tilde{p}^{\prime}+\left( {(\omega-Mk)^{2}-k^{2}- \frac{m^{2}}{r^{2}}} \right)\tilde{p}=0. \end{equation}
This is Bessel's equation of order  $m$ rescaled by
$m$ rescaled by  $\alpha$, where
$\alpha$, where
 \begin{equation} \alpha^{2}=(\omega-Mk)^{2}-k^{2}; \end{equation}
\begin{equation} \alpha^{2}=(\omega-Mk)^{2}-k^{2}; \end{equation}
it will turn out later that the branch chosen for  $\alpha$ does not matter, although for definiteness, one may choose
$\alpha$ does not matter, although for definiteness, one may choose  $\textrm {Re}(\alpha )>0$. Bessel's equation has two pairs of linearly independent solutions that we will make use of: the Bessel functions of the first and second kind,
$\textrm {Re}(\alpha )>0$. Bessel's equation has two pairs of linearly independent solutions that we will make use of: the Bessel functions of the first and second kind,  $J_m(\alpha r)$ and
$J_m(\alpha r)$ and  $Y_m(\alpha r)$; and the Hankel functions of the first and second kind,
$Y_m(\alpha r)$; and the Hankel functions of the first and second kind,  $H_m^{(1)}(\alpha r)$ and
$H_m^{(1)}(\alpha r)$ and  $H_m^{(2)}(\alpha r)$. More information regarding these can be found in Abramowitz & Stegun (Reference Abramowitz and Stegun1964). It is worth noting that only
$H_m^{(2)}(\alpha r)$. More information regarding these can be found in Abramowitz & Stegun (Reference Abramowitz and Stegun1964). It is worth noting that only  $J_m(\alpha r)$ is regular at
$J_m(\alpha r)$ is regular at  $r=0$, with the other solutions all requiring a branch cut along
$r=0$, with the other solutions all requiring a branch cut along  $\alpha r<0$, with a singularity at
$\alpha r<0$, with a singularity at  $\alpha r=0$.
$\alpha r=0$.
2.3. Homogeneous solutions within the region of sheared flow
In this section, we will construct the solution of the homogeneous Pridmore-Brown equation (2.9) when  $U(r)$ varies by proposing a Frobenius expansion about the singularities of the Pridmore-Brown equation.
$U(r)$ varies by proposing a Frobenius expansion about the singularities of the Pridmore-Brown equation.
In addition to the singularity at  $r=0$, the homogeneous Pridmore-Brown equation possesses regular singularities whenever
$r=0$, the homogeneous Pridmore-Brown equation possesses regular singularities whenever  $\omega - U(r)\,k = 0$; these singularities correspond to the critical layer. Within the sheared flow region
$\omega - U(r)\,k = 0$; these singularities correspond to the critical layer. Within the sheared flow region  $1-h< r<1$, since the velocity profile
$1-h< r<1$, since the velocity profile  $U(r)$ is quadratic in
$U(r)$ is quadratic in  $r$, there are exactly two critical values
$r$, there are exactly two critical values  $r = r_c$ for which
$r = r_c$ for which  $\omega -U(r_c)\,k=0$. Note that in general, these critical values will be complex. Solving this quadratic equation gives the two singularities explicitly as
$\omega -U(r_c)\,k=0$. Note that in general, these critical values will be complex. Solving this quadratic equation gives the two singularities explicitly as  $r_c^{+}$ and
$r_c^{+}$ and  $r_c^{-}$, where
$r_c^{-}$, where
 \begin{equation} r_c^{{\pm}}=1-h\pm Q, \quad Q=h\sqrt{1-\frac{\omega}{Mk}}. \end{equation}
\begin{equation} r_c^{{\pm}}=1-h\pm Q, \quad Q=h\sqrt{1-\frac{\omega}{Mk}}. \end{equation}
For convenience, we will take  $\textrm {Re}(Q)\geq 0$, so that
$\textrm {Re}(Q)\geq 0$, so that  $\textrm {Re}(r_c^{+}) \geq 1-h$ and
$\textrm {Re}(r_c^{+}) \geq 1-h$ and  $\textrm {Re}(r_c^{-}) \leq 1-h$. Since solutions with this quadratic flow profile
$\textrm {Re}(r_c^{-}) \leq 1-h$. Since solutions with this quadratic flow profile  $U(r)$ are valid only for
$U(r)$ are valid only for  $1-h< r<1$, it will therefore be
$1-h< r<1$, it will therefore be  $r_c^{+}$ that we are mostly concerned about here.
$r_c^{+}$ that we are mostly concerned about here.
Following Brambley et al. (Reference Brambley, Darau and Rienstra2012a), we propose a Frobenius expansion (Teschl Reference Teschl2012) about the regular singularity  $r_c^{+}$:
$r_c^{+}$:
 \begin{equation} \tilde{p}(r)=\sum_{n=0}^{\infty} a_n(r-r_c^{+})^{n+\sigma}, \quad \text{with } a_0 \neq 0. \end{equation}
\begin{equation} \tilde{p}(r)=\sum_{n=0}^{\infty} a_n(r-r_c^{+})^{n+\sigma}, \quad \text{with } a_0 \neq 0. \end{equation}
Specifying  $a_0 \neq 0$ results in a condition on
$a_0 \neq 0$ results in a condition on  $\sigma$, and we find that
$\sigma$, and we find that  $\sigma =0,3$. By Fuchs’ theorem (Teschl Reference Teschl2012), this gives a pair of linearly independent solutions of the form
$\sigma =0,3$. By Fuchs’ theorem (Teschl Reference Teschl2012), this gives a pair of linearly independent solutions of the form
 \begin{gather} \tilde{p}_1(r)=\sum_{n=0}^{\infty} a_n (r-r_c^{+})^{n+3}, \end{gather}
\begin{gather} \tilde{p}_1(r)=\sum_{n=0}^{\infty} a_n (r-r_c^{+})^{n+3}, \end{gather} \begin{gather}\tilde{p}_2(r)=A\,\tilde{p}_1(r)\log(r-r_c^{+})+\sum_{n=0}^{\infty} b_n(r-r_c^{+})^{n}. \end{gather}
\begin{gather}\tilde{p}_2(r)=A\,\tilde{p}_1(r)\log(r-r_c^{+})+\sum_{n=0}^{\infty} b_n(r-r_c^{+})^{n}. \end{gather}
The coefficients  $a_n$ and
$a_n$ and  $b_n$ are derived in Appendix A, where, in particular, it is found that
$b_n$ are derived in Appendix A, where, in particular, it is found that
 \begin{equation} a_0 = b_0 = 1, \quad b_1 = 0, \quad b_2 ={-}\frac{1}{2} \left(k^{2}+\left(\frac{m}{r_c^+}\right)^2\right) , \quad b_3 =0, \end{equation}
\begin{equation} a_0 = b_0 = 1, \quad b_1 = 0, \quad b_2 ={-}\frac{1}{2} \left(k^{2}+\left(\frac{m}{r_c^+}\right)^2\right) , \quad b_3 =0, \end{equation}and that
 \begin{equation} A={-}\frac{1}{3}\left( {\frac{1}{Q}-\frac{1}{r_c^{+}}} \right) \left(k^{2} + \left(\frac{m}{r_c^+}\right)^2\right) -\frac{2m^{2}}{3r_c^{{+}3}}, \end{equation}
\begin{equation} A={-}\frac{1}{3}\left( {\frac{1}{Q}-\frac{1}{r_c^{+}}} \right) \left(k^{2} + \left(\frac{m}{r_c^+}\right)^2\right) -\frac{2m^{2}}{3r_c^{{+}3}}, \end{equation}
the latter in agreement with (2.3)–(2.5) of Brambley et al. (Reference Brambley, Darau and Rienstra2012a). We note in passing that in practice we may be limited by the radius of convergence of (2.14), and in such cases, the solutions given above are analytically continued by a companion expansion of the Pridmore-Brown equation about  $r=1$, as described in § A.2. Other than being a complication concerning numerical convergence, this complication may be ignored, and
$r=1$, as described in § A.2. Other than being a complication concerning numerical convergence, this complication may be ignored, and  $\tilde {p}_1$ and
$\tilde {p}_1$ and  $\tilde {p}_2$ thought of as being defined by the expressions in (2.14).
$\tilde {p}_2$ thought of as being defined by the expressions in (2.14).
Due to the log term in  $\tilde {p}_2$ in (2.14b), a branch cut is necessary in the complex
$\tilde {p}_2$ in (2.14b), a branch cut is necessary in the complex  $r$-plane originating from the branch point
$r$-plane originating from the branch point  $r = r_c^{+}$. This branch cut must be such that the solutions remain continuous for the real values of
$r = r_c^{+}$. This branch cut must be such that the solutions remain continuous for the real values of  $r\in [1-h,1]$, so the branch cut must avoid crossing the real
$r\in [1-h,1]$, so the branch cut must avoid crossing the real  $r$-axis between
$r$-axis between  $1-h$ and
$1-h$ and  $1$. In the following, we achieve this by choosing the branch cuts parallel to the imaginary axis and away from the real axis, as depicted in figure 2. When
$1$. In the following, we achieve this by choosing the branch cuts parallel to the imaginary axis and away from the real axis, as depicted in figure 2. When  $r_c^{+}$ is real and
$r_c^{+}$ is real and  $1-h< r_c^{+}<1$, no suitable choice of branch cut exists, and as a result, any solution
$1-h< r_c^{+}<1$, no suitable choice of branch cut exists, and as a result, any solution  $\tilde {p}(r)$ with
$\tilde {p}(r)$ with  $\tilde {p}(r_c^{+})\neq 0$ necessarily has a singular third derivative at
$\tilde {p}(r_c^{+})\neq 0$ necessarily has a singular third derivative at  $r_c^{+}$. This occurs only for particular values of
$r_c^{+}$. This occurs only for particular values of  $k$, however, and we can map the corresponding values of
$k$, however, and we can map the corresponding values of  $k$ in the complex
$k$ in the complex  $k$-plane to find that they fall exactly on the half-line
$k$-plane to find that they fall exactly on the half-line  $[{\omega }/{M},\infty )$; we refer to this range of excluded values of
$[{\omega }/{M},\infty )$; we refer to this range of excluded values of  $k$ as the critical layer branch cut. As
$k$ as the critical layer branch cut. As  $r_c^{+}$ becomes real, note that the value of
$r_c^{+}$ becomes real, note that the value of  $\tilde {p}_2(r_c^{+})$ is different depending on whether we approach from the positive or negative imaginary part. Thinking of
$\tilde {p}_2(r_c^{+})$ is different depending on whether we approach from the positive or negative imaginary part. Thinking of  $r_c^{+}(k)$ as a function of
$r_c^{+}(k)$ as a function of  $k$, this corresponds to approaching the critical layer branch cut
$k$, this corresponds to approaching the critical layer branch cut  $[{{\omega }/{M}},\infty )$ in
$[{{\omega }/{M}},\infty )$ in  $k$ from above or below. This reinforces the consideration of the critical layer appearing as a branch cut in the complex
$k$ from above or below. This reinforces the consideration of the critical layer appearing as a branch cut in the complex  $k$-plane. The change in
$k$-plane. The change in  $\tilde {p}_2$ when crossing the critical layer branch cut from below to above is described as
$\tilde {p}_2$ when crossing the critical layer branch cut from below to above is described as
 \begin{equation} {\rm \Delta} \tilde{p}_2(r) = \lim_{{{{\rm Im}}(k)\searrow 0+}} \tilde{p}_2(r) - \lim_{{{{\rm Im}}(k)\nearrow 0-}} \tilde{p}_2(r) ={-}2{\rm \pi} \mathrm{i} A\,\tilde{p}_1(r)\,H(r_c^{+}-r), \end{equation}
\begin{equation} {\rm \Delta} \tilde{p}_2(r) = \lim_{{{{\rm Im}}(k)\searrow 0+}} \tilde{p}_2(r) - \lim_{{{{\rm Im}}(k)\nearrow 0-}} \tilde{p}_2(r) ={-}2{\rm \pi} \mathrm{i} A\,\tilde{p}_1(r)\,H(r_c^{+}-r), \end{equation}
where  $H(r)$ is the Heaviside function.
$H(r)$ is the Heaviside function.

Figure 2. Schematic of possible locations of the  $r_c^{+}$ branch cut in the complex
$r_c^{+}$ branch cut in the complex  $r$-plane. (a) A possible choice of branch cut when
$r$-plane. (a) A possible choice of branch cut when  $\textrm {Im} (r_c^{+})>0$. (b) The other choice of branch cut is needed when
$\textrm {Im} (r_c^{+})>0$. (b) The other choice of branch cut is needed when  $\textrm {Im} (r_c^{+})<0$.
$\textrm {Im} (r_c^{+})<0$.
In order to retrieve this result, we need only consider the  $\log (r-r_c^{+})$ term of
$\log (r-r_c^{+})$ term of  $\tilde {p}_2$. Note that
$\tilde {p}_2$. Note that  $\partial r_c^{+}/\partial k > 0$ for real
$\partial r_c^{+}/\partial k > 0$ for real  $k$ and real positive
$k$ and real positive  $\omega$; hence if
$\omega$; hence if  $k$ is nearly real and
$k$ is nearly real and  $\textrm {Im} (k)>0$, then
$\textrm {Im} (k)>0$, then  $\textrm {Im} (r_c^{+})>0$, and we must take the branch cut of
$\textrm {Im} (r_c^{+})>0$, and we must take the branch cut of  $\log (r-r_c^{+})$ upwards towards
$\log (r-r_c^{+})$ upwards towards  $+\mathrm {i}\infty$. Similarly, if
$+\mathrm {i}\infty$. Similarly, if  $\textrm {Im} (k)<0$, then
$\textrm {Im} (k)<0$, then  $\textrm {Im} (r_c^{+})<0$, and the branch cut for
$\textrm {Im} (r_c^{+})<0$, and the branch cut for  $\log (r-r_c^{+})$ must be taken downwards to
$\log (r-r_c^{+})$ must be taken downwards to  $-\mathrm {i}\infty$. When
$-\mathrm {i}\infty$. When  $r_c^{+}$ is located on the real line,
$r_c^{+}$ is located on the real line,  $(r-r_c^{+})$ is negative for
$(r-r_c^{+})$ is negative for  $r< r_c^{+}$. When we choose the branch cut into the upper half-plane, this corresponds to a complex argument of
$r< r_c^{+}$. When we choose the branch cut into the upper half-plane, this corresponds to a complex argument of  $-{\rm \pi}$. When we choose the branch cut into the lower half-plane, this corresponds to a complex argument of
$-{\rm \pi}$. When we choose the branch cut into the lower half-plane, this corresponds to a complex argument of  ${\rm \pi}$. This difference results in the jump of
${\rm \pi}$. This difference results in the jump of  $2{\rm \pi} \mathrm {i}$ given. If we instead consider
$2{\rm \pi} \mathrm {i}$ given. If we instead consider  $r>r_c^{+}$, then the same argument is retrieved regardless of which direction we take the branch cuts, so no jump is observed. This is the reason for the presence of the Heaviside function.
$r>r_c^{+}$, then the same argument is retrieved regardless of which direction we take the branch cuts, so no jump is observed. This is the reason for the presence of the Heaviside function.
2.4. Homogeneous solutions across the full domain
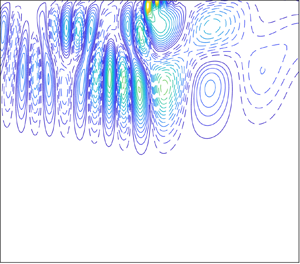
In order to construct a full solution in  $r\in [0,1]$, we now construct two solutions
$r\in [0,1]$, we now construct two solutions  $\psi _1(r)$ and
$\psi _1(r)$ and  $\psi _2(r)$ that solve (2.9) across
$\psi _2(r)$ that solve (2.9) across  $r\in [0,1]$, by patching together the solutions derived above in §§ 2.2 and 2.3. We construct
$r\in [0,1]$, by patching together the solutions derived above in §§ 2.2 and 2.3. We construct  $\psi _1(r)$ to satisfy the boundary conditions (2.6a,b) at
$\psi _1(r)$ to satisfy the boundary conditions (2.6a,b) at  $r=0$, by taking
$r=0$, by taking
 \begin{equation} \psi_1(r)=\begin{cases} J_m(\alpha r), & 0\leq r\leq 1-h, \\ C_1\,\tilde{p}_1(r)+D_1\,\tilde{p}_2(r), & 1-h\leq r\leq 1, \end{cases} \end{equation}
\begin{equation} \psi_1(r)=\begin{cases} J_m(\alpha r), & 0\leq r\leq 1-h, \\ C_1\,\tilde{p}_1(r)+D_1\,\tilde{p}_2(r), & 1-h\leq r\leq 1, \end{cases} \end{equation}
where the coefficients  $C_1$ and
$C_1$ and  $D_1$ ensure
$D_1$ ensure  $C^{1}$ continuity, and are given by
$C^{1}$ continuity, and are given by
 \begin{gather} C_1=\frac{J_m(\alpha(1-h))\,\tilde{p}_2^{\prime}(1-h)- \alpha\,J_m^{\prime}(\alpha(1-h))\,\tilde{p}_2(1-h)}{W(1-h)}, \end{gather}
\begin{gather} C_1=\frac{J_m(\alpha(1-h))\,\tilde{p}_2^{\prime}(1-h)- \alpha\,J_m^{\prime}(\alpha(1-h))\,\tilde{p}_2(1-h)}{W(1-h)}, \end{gather} \begin{gather}D_1={-}\frac{J_m(\alpha(1-h))\,\tilde{p}_1^{\prime}(1-h)-\alpha\, J_m^{\prime}(\alpha(1-h))\,\tilde{p}_1(1-h)}{W(1-h)}, \end{gather}
\begin{gather}D_1={-}\frac{J_m(\alpha(1-h))\,\tilde{p}_1^{\prime}(1-h)-\alpha\, J_m^{\prime}(\alpha(1-h))\,\tilde{p}_1(1-h)}{W(1-h)}, \end{gather}
and  $W(r) = \mathcal {W}(\tilde {p}_1,\tilde {p}_2;r)$ is the Wronskian of
$W(r) = \mathcal {W}(\tilde {p}_1,\tilde {p}_2;r)$ is the Wronskian of  $\tilde {p}_1$ and
$\tilde {p}_1$ and  $\tilde {p}_2$, given in § A.4 as
$\tilde {p}_2$, given in § A.4 as
 \begin{equation} W(r)=\mathcal{W}(\tilde{p}_1,\tilde{p}_2;r) = \tilde{p}_1(r)\,\tilde{p}_2'(r)-\tilde{p}_{2}(r)\,\tilde{p}_1'(r) ={-}\frac{3}{4}\,\frac{r_c^{+}(r-r_c^{+})^{2}(r-r_c^{-})^{2}}{rQ^{2}}. \end{equation}
\begin{equation} W(r)=\mathcal{W}(\tilde{p}_1,\tilde{p}_2;r) = \tilde{p}_1(r)\,\tilde{p}_2'(r)-\tilde{p}_{2}(r)\,\tilde{p}_1'(r) ={-}\frac{3}{4}\,\frac{r_c^{+}(r-r_c^{+})^{2}(r-r_c^{-})^{2}}{rQ^{2}}. \end{equation} Having constructed  $\psi _1$ to satisfy the boundary condition at
$\psi _1$ to satisfy the boundary condition at  $r=0$, we now proceed to construct
$r=0$, we now proceed to construct  $\psi _2$ that satisfies the boundary condition (2.7) at
$\psi _2$ that satisfies the boundary condition (2.7) at  $r=1$. Writing
$r=1$. Writing  $\psi _2$ in terms of the homogeneous solutions derived above,
$\psi _2$ in terms of the homogeneous solutions derived above,
 \begin{equation} \psi_2(r)=\begin{cases} \check{C}_2\,H_m^{(1)}(\alpha r)+\check{D}_2\,H_m^{(2)}(\alpha r), & 0\leq r\leq 1-h, \\ \hat{C}_2\,\tilde{p}_1(r)+\hat{D}_2\,\tilde{p}_2(r), & 1-h\leq r \leq 1, \end{cases} \end{equation}
\begin{equation} \psi_2(r)=\begin{cases} \check{C}_2\,H_m^{(1)}(\alpha r)+\check{D}_2\,H_m^{(2)}(\alpha r), & 0\leq r\leq 1-h, \\ \hat{C}_2\,\tilde{p}_1(r)+\hat{D}_2\,\tilde{p}_2(r), & 1-h\leq r \leq 1, \end{cases} \end{equation}
we choose  $\hat {C}_2$ and
$\hat {C}_2$ and  $\hat {D}_2$ to satisfy
$\hat {D}_2$ to satisfy  $\psi _2(1)=1$ and
$\psi _2(1)=1$ and  $\psi ^{\prime }_2(1)=-{\mathrm {i}\omega }/{Z}$. This forces a non-zero normalized solution for
$\psi ^{\prime }_2(1)=-{\mathrm {i}\omega }/{Z}$. This forces a non-zero normalized solution for  $\psi _2$ that satisfies the boundary condition (2.7) at
$\psi _2$ that satisfies the boundary condition (2.7) at  $r=1$, and leads to
$r=1$, and leads to
 \begin{equation} \hat{C}_2= \frac{{\tilde{p}_2'(1)}+\dfrac{\mathrm{i}\omega}{Z}\,{\tilde{p}_2(1)}}{W(1)}, \quad \hat{D}_2={-}\frac{{\tilde{p}_1'(1)}+\dfrac{\mathrm{i}\omega}{Z}\,{\tilde{p}_1(1)}}{W(1)}. \end{equation}
\begin{equation} \hat{C}_2= \frac{{\tilde{p}_2'(1)}+\dfrac{\mathrm{i}\omega}{Z}\,{\tilde{p}_2(1)}}{W(1)}, \quad \hat{D}_2={-}\frac{{\tilde{p}_1'(1)}+\dfrac{\mathrm{i}\omega}{Z}\,{\tilde{p}_1(1)}}{W(1)}. \end{equation}
The coefficients  $\check {C}_2$ and
$\check {C}_2$ and  $\check {D}_2$ are chosen such that our solution is
$\check {D}_2$ are chosen such that our solution is  $C^{1}$ continuous at
$C^{1}$ continuous at  $r=1-h$, giving
$r=1-h$, giving
 \begin{align} \left( { \begin{array}{c} \check{C}_2 \\ \check{D}_2 \end{array} } \right) &=\frac{\mathrm{i}{\rm \pi}(1 - h)}{4} \left( { \begin{array}{cc} \alpha\,H_m^{(2)\prime} (\alpha (1 - h)) & {-}H_m^{(2)}(\alpha (1 - h)) \\ {-}\alpha\,H_m^{(1)\prime}(\alpha (1 - h)) & H_m^{(1)}(\alpha (1 - h)) \end{array} } \right)\nonumber\\ &\quad\times \left( { \begin{array}{cc} \tilde{p}_1(1 - h) & \tilde{p}_2(1 - h) \\ \tilde{p}_1^{\prime}(1 - h) & \tilde{p}_2^{\prime}(1 - h) \end{array} } \right) \left( { \begin{array}{c} \hat{C}_2 \\ \hat{D}_2 \end{array} } \right), \end{align}
\begin{align} \left( { \begin{array}{c} \check{C}_2 \\ \check{D}_2 \end{array} } \right) &=\frac{\mathrm{i}{\rm \pi}(1 - h)}{4} \left( { \begin{array}{cc} \alpha\,H_m^{(2)\prime} (\alpha (1 - h)) & {-}H_m^{(2)}(\alpha (1 - h)) \\ {-}\alpha\,H_m^{(1)\prime}(\alpha (1 - h)) & H_m^{(1)}(\alpha (1 - h)) \end{array} } \right)\nonumber\\ &\quad\times \left( { \begin{array}{cc} \tilde{p}_1(1 - h) & \tilde{p}_2(1 - h) \\ \tilde{p}_1^{\prime}(1 - h) & \tilde{p}_2^{\prime}(1 - h) \end{array} } \right) \left( { \begin{array}{c} \hat{C}_2 \\ \hat{D}_2 \end{array} } \right), \end{align}
where the factor at the beginning comes from the Wronskian of  $H_m^{(1)}$ and
$H_m^{(1)}$ and  $H_m^{(2)}$ from Abramowitz & Stegun (Reference Abramowitz and Stegun1964), formula 9.1.17.
$H_m^{(2)}$ from Abramowitz & Stegun (Reference Abramowitz and Stegun1964), formula 9.1.17.
We will also require later the jump in behaviour of  $\psi _1$ and
$\psi _1$ and  $\psi _2$ as
$\psi _2$ as  $k$ crosses the critical layer branch cut from below to above. Since any jump comes from the log term in
$k$ crosses the critical layer branch cut from below to above. Since any jump comes from the log term in  $\tilde {p}_2(r)$ when
$\tilde {p}_2(r)$ when  $r< r_c^{+}$, we have, provided that
$r< r_c^{+}$, we have, provided that  $r_c^{+}<1$,
$r_c^{+}<1$,
 \begin{gather} {\rm \Delta} C_1=2\mathrm{i}{\rm \pi} A D_1, \quad {\rm \Delta} \hat{C}_2 = {\rm \Delta} D_1 = {\rm \Delta} \hat{D}_2 = 0, \end{gather}
\begin{gather} {\rm \Delta} C_1=2\mathrm{i}{\rm \pi} A D_1, \quad {\rm \Delta} \hat{C}_2 = {\rm \Delta} D_1 = {\rm \Delta} \hat{D}_2 = 0, \end{gather} \begin{gather}\left( { \begin{array}{c} {\rm \Delta} \check{C}_2 \\ {\rm \Delta} \check{D}_2 \end{array} } \right)= \frac{{\rm \pi}^{2}(1 - h)A \hat{D}_2}{2} \left( { \begin{array}{cc} \alpha\,H_m^{(2)\prime} (\alpha (1 - h)) & {-}H_m^{(2)}(\alpha (1 - h)) \\ {-}\alpha\,H_m^{(1)\prime}(\alpha (1 - h)) & H_m^{(1)}(\alpha (1 - h)) \end{array}} \right) \left( { \begin{array}{c} \tilde{p}_1(1 - h) \\ \tilde{p}_1^{\prime}(1 - h) \end{array}} \right), \end{gather}
\begin{gather}\left( { \begin{array}{c} {\rm \Delta} \check{C}_2 \\ {\rm \Delta} \check{D}_2 \end{array} } \right)= \frac{{\rm \pi}^{2}(1 - h)A \hat{D}_2}{2} \left( { \begin{array}{cc} \alpha\,H_m^{(2)\prime} (\alpha (1 - h)) & {-}H_m^{(2)}(\alpha (1 - h)) \\ {-}\alpha\,H_m^{(1)\prime}(\alpha (1 - h)) & H_m^{(1)}(\alpha (1 - h)) \end{array}} \right) \left( { \begin{array}{c} \tilde{p}_1(1 - h) \\ \tilde{p}_1^{\prime}(1 - h) \end{array}} \right), \end{gather}
resulting in (provided that  $r_c^{+}<1$)
$r_c^{+}<1$)
 \begin{gather} {\rm \Delta} \psi_1(r)=2\mathrm{i}{\rm \pi} AD_1\,\tilde{p}_1H(r-r_c^{+}), \end{gather}
\begin{gather} {\rm \Delta} \psi_1(r)=2\mathrm{i}{\rm \pi} AD_1\,\tilde{p}_1H(r-r_c^{+}), \end{gather} \begin{gather}{\rm \Delta} \psi_2(r)=\begin{cases} {\rm \Delta} \check{C}_2\,H_m^{(1)}(\alpha r)+{\rm \Delta} \check{D}_2\,H_m^{(2)}(\alpha r), & 0\leq r\leq 1-h, \\ -2\mathrm{i}{\rm \pi} A\,\tilde{p}_1(r)\,\hat{D}_2\,H(r_c^{+}-r), & 1-h\leq r \leq 1. \end{cases} \end{gather}
\begin{gather}{\rm \Delta} \psi_2(r)=\begin{cases} {\rm \Delta} \check{C}_2\,H_m^{(1)}(\alpha r)+{\rm \Delta} \check{D}_2\,H_m^{(2)}(\alpha r), & 0\leq r\leq 1-h, \\ -2\mathrm{i}{\rm \pi} A\,\tilde{p}_1(r)\,\hat{D}_2\,H(r_c^{+}-r), & 1-h\leq r \leq 1. \end{cases} \end{gather}
Note that if  $r_c^{+}>1$, then
$r_c^{+}>1$, then  ${\rm \Delta} \psi _1 = {\rm \Delta} \psi _2 = 0$, since the
${\rm \Delta} \psi _1 = {\rm \Delta} \psi _2 = 0$, since the  $\psi _1$ and
$\psi _1$ and  $\psi _2$ solutions are defined uniquely by their boundary conditions, and no branch point occurs on the interval
$\psi _2$ solutions are defined uniquely by their boundary conditions, and no branch point occurs on the interval  $r\in [1-h,1]$ to cause a jump.
$r\in [1-h,1]$ to cause a jump.
2.5. Modal solutions
Modal solutions of the homogeneous Pridmore-Brown equation (2.9) are non-zero solutions  $\tilde {p}(r)$ that satisfy the boundary conditions (2.6a,b) and (2.7) at
$\tilde {p}(r)$ that satisfy the boundary conditions (2.6a,b) and (2.7) at  $r=0$ and
$r=0$ and  $r=1$. In general, satisfying both boundary conditions would force the solution
$r=1$. In general, satisfying both boundary conditions would force the solution  $\tilde {p}(r) \equiv 0$, so non-zero solutions exist only for particular modal eigenvalues
$\tilde {p}(r) \equiv 0$, so non-zero solutions exist only for particular modal eigenvalues  $k$ (assuming that
$k$ (assuming that  $\omega$ is given and fixed). In contrast, the solution
$\omega$ is given and fixed). In contrast, the solution  $\psi _1(r)$ is never identically zero and always satisfies the homogeneous Pridmore-Brown equation and the boundary condition at
$\psi _1(r)$ is never identically zero and always satisfies the homogeneous Pridmore-Brown equation and the boundary condition at  $r=0$; indeed, any solution satisfying the boundary condition at
$r=0$; indeed, any solution satisfying the boundary condition at  $r=0$ is necessarily a multiple of
$r=0$ is necessarily a multiple of  $\psi _1(r)$. Likewise, the solution
$\psi _1(r)$. Likewise, the solution  $\psi _2(r)$ is never identically zero and always satisfies the homogeneous Pridmore-Brown equation and the boundary condition at
$\psi _2(r)$ is never identically zero and always satisfies the homogeneous Pridmore-Brown equation and the boundary condition at  $r=1$, and any solution satisfying the boundary condition at
$r=1$, and any solution satisfying the boundary condition at  $r=1$ is necessarily a multiple of
$r=1$ is necessarily a multiple of  $\psi _2(r)$. In general,
$\psi _2(r)$. In general,  $\psi _1$ and
$\psi _1$ and  $\psi _2$ are linearly independent, so their Wronskian
$\psi _2$ are linearly independent, so their Wronskian  $\mathcal {W}(\psi _1,\psi _2;r)$ is not identically zero, where
$\mathcal {W}(\psi _1,\psi _2;r)$ is not identically zero, where
 \begin{equation} \mathcal{W}(\psi_1,\psi_2;r)=\psi_1(r)\,\psi_2^{\prime}(r)- \psi_2(r)\,\psi_1^{\prime}(r). \end{equation}
\begin{equation} \mathcal{W}(\psi_1,\psi_2;r)=\psi_1(r)\,\psi_2^{\prime}(r)- \psi_2(r)\,\psi_1^{\prime}(r). \end{equation}
However, if  $\tilde {p}(r)$ is non-zero and satisfies both the boundary conditions at
$\tilde {p}(r)$ is non-zero and satisfies both the boundary conditions at  $r=0$ and
$r=0$ and  $r=1$, then
$r=1$, then  $\tilde {p}(r) = a\,\psi _1(r) = b\,\psi _2(r)$ for some non-zero coefficients
$\tilde {p}(r) = a\,\psi _1(r) = b\,\psi _2(r)$ for some non-zero coefficients  $a, b$. In other words, a modal solution is one where
$a, b$. In other words, a modal solution is one where  $\psi _1$ and
$\psi _1$ and  $\psi _2$ are linearly dependent, so
$\psi _2$ are linearly dependent, so  $\mathcal {W}(\psi _1,\psi _2;r) \equiv 0$.
$\mathcal {W}(\psi _1,\psi _2;r) \equiv 0$.
For  $1-h\leq r\leq 1$, substituting
$1-h\leq r\leq 1$, substituting  $\psi _1$ from (2.18) and
$\psi _1$ from (2.18) and  $\psi _2$ from (2.21) into the Wronskian (2.26) gives
$\psi _2$ from (2.21) into the Wronskian (2.26) gives
 \begin{equation} \mathcal{W}(\psi_1,\psi_2;r)=(C_1\hat{D}_2-\hat{C}_2D_1)\,W(r), \end{equation}
\begin{equation} \mathcal{W}(\psi_1,\psi_2;r)=(C_1\hat{D}_2-\hat{C}_2D_1)\,W(r), \end{equation}
where  $W(r)$ is the Wronskian between
$W(r)$ is the Wronskian between  $\tilde {p}_1$ and
$\tilde {p}_1$ and  $\tilde {p}_2$ and is given earlier, in (2.20). Since
$\tilde {p}_2$ and is given earlier, in (2.20). Since  $\tilde {p}_1$ and
$\tilde {p}_1$ and  $\tilde {p}_2$ were constructed to be linearly independent, we expect
$\tilde {p}_2$ were constructed to be linearly independent, we expect  $W(r)$ not to be identically zero, and indeed (2.20) shows that
$W(r)$ not to be identically zero, and indeed (2.20) shows that  $W(r) \neq 0$ except at the critical layer
$W(r) \neq 0$ except at the critical layer  $r = r_c^{+}$. A modal solution, therefore, is given by the condition
$r = r_c^{+}$. A modal solution, therefore, is given by the condition  $C_1\hat {D}_2 - \hat {C}_2 D_1 = 0$, which is independent of
$C_1\hat {D}_2 - \hat {C}_2 D_1 = 0$, which is independent of  $r$, and implies that
$r$, and implies that  $C_1/D_1 = \hat {C}_2/\hat {D}_2$, so that
$C_1/D_1 = \hat {C}_2/\hat {D}_2$, so that  $\psi _1$ and
$\psi _1$ and  $\psi _2$ are multiples of one another.
$\psi _2$ are multiples of one another.
The same can be seen for  $r\leq 1-h$. In this case, the Wronskian (2.26) becomes
$r\leq 1-h$. In this case, the Wronskian (2.26) becomes
 \begin{equation} \mathcal{W}(\psi_1,\psi_2;r) = \alpha\check{C}_2\,\mathcal{W}(J_m,H_m^{(1)};r) +\alpha\check{D}_2\,\mathcal{W}(J_m,H_m^{(2)};r) = \alpha(\check{C}_2-\check{D}_2)\,\frac{2\mathrm{i}}{{\rm \pi} r}, \end{equation}
\begin{equation} \mathcal{W}(\psi_1,\psi_2;r) = \alpha\check{C}_2\,\mathcal{W}(J_m,H_m^{(1)};r) +\alpha\check{D}_2\,\mathcal{W}(J_m,H_m^{(2)};r) = \alpha(\check{C}_2-\check{D}_2)\,\frac{2\mathrm{i}}{{\rm \pi} r}, \end{equation}
where we have made use of the Bessel function identities 9.1.3, 9.1.4 and 9.1.16 from Abramowitz & Stegun (Reference Abramowitz and Stegun1964). Note in particular that  $r\,\mathcal {W}(\psi _1,\psi _2;r)$ is a constant independent of
$r\,\mathcal {W}(\psi _1,\psi _2;r)$ is a constant independent of  $r$ for
$r$ for  $0\leq r\leq 1-h$. Since
$0\leq r\leq 1-h$. Since  $\mathcal {W}(\psi _1,\psi _2;r)$ is continuous in
$\mathcal {W}(\psi _1,\psi _2;r)$ is continuous in  $r$ across
$r$ across  $r = 1-h$, because
$r = 1-h$, because  $\psi _1$ and
$\psi _1$ and  $\psi _2$ are both
$\psi _2$ are both  $C^{1}$ continuous, it follows that for
$C^{1}$ continuous, it follows that for  $0\leq r\leq 1-h$, we can set
$0\leq r\leq 1-h$, we can set  $r\,\mathcal {W}(\psi _1,\psi _2;r)=(1-h)\,\mathcal {W}(\psi _1,\psi _2;1-h)$. We therefore arrive at the conclusion that
$r\,\mathcal {W}(\psi _1,\psi _2;r)=(1-h)\,\mathcal {W}(\psi _1,\psi _2;1-h)$. We therefore arrive at the conclusion that
 \begin{equation} \mathcal{W}(\psi_1,\psi_2;r) = (C_1\hat{D}_2-\hat{C}_2D_1)\times\begin{cases} W(r), & 1-h \leq r \leq 1, \\ W(1-h)\,\dfrac{1-h}{r}, & 0 \leq r \leq 1-h, \end{cases} \end{equation}
\begin{equation} \mathcal{W}(\psi_1,\psi_2;r) = (C_1\hat{D}_2-\hat{C}_2D_1)\times\begin{cases} W(r), & 1-h \leq r \leq 1, \\ W(1-h)\,\dfrac{1-h}{r}, & 0 \leq r \leq 1-h, \end{cases} \end{equation}
and that a mode corresponds to the dispersion relation  $0 = D(k,\omega ) = C_1\hat {D}_2-\hat {C}_2D_1$. In the next section, we see how these modal solutions occur naturally as poles in the solution of the non-homogeneous Pridmore-Brown equation.
$0 = D(k,\omega ) = C_1\hat {D}_2-\hat {C}_2D_1$. In the next section, we see how these modal solutions occur naturally as poles in the solution of the non-homogeneous Pridmore-Brown equation.
3. Inhomogeneous solutions and inverting the Fourier transform
3.1. Inhomogeneous solution of the Pridmore-Brown equation
While previously we have been solving only the homogeneous form (2.9), our original problem was to solve the inhomogeneous Pridmore-Brown equation (2.5a) subject to a harmonic point mass source. Due to the right-hand side of (2.5a) being a scalar multiple of a delta function, located at  $r=r_0$, our solution will be the same scalar multiple of the Green's function, and we denote this solution as
$r=r_0$, our solution will be the same scalar multiple of the Green's function, and we denote this solution as  $\tilde {G}$. This function will satisfy the boundary condition at
$\tilde {G}$. This function will satisfy the boundary condition at  $r=0$ and
$r=0$ and  $r=1$, and will solve the homogeneous Pridmore-Brown equation for
$r=1$, and will solve the homogeneous Pridmore-Brown equation for  $r< r_0$ and
$r< r_0$ and  $r>r_0$; hence
$r>r_0$; hence  $\tilde {G}$ may be written as a multiple of the homogeneous solution
$\tilde {G}$ may be written as a multiple of the homogeneous solution  $\psi _1$ for
$\psi _1$ for  $r< r_0$, and as a multiple of the homogeneous solution
$r< r_0$, and as a multiple of the homogeneous solution  $\psi _2$ for
$\psi _2$ for  $r>r_0$. All that is required is to join the two solutions at
$r>r_0$. All that is required is to join the two solutions at  $r=r_0$ such that they are continuous, and their derivative is discontinuous with a jump exactly matching the amplitude of the delta function. This may be written succinctly as
$r=r_0$ such that they are continuous, and their derivative is discontinuous with a jump exactly matching the amplitude of the delta function. This may be written succinctly as
 \begin{equation} \tilde{G}=\frac{\omega-U(r_0)\,k}{2{\rm \pi}\mathrm{i} r_0}\,\frac{\psi_1(\check{r})\, \psi_2(\hat{r})}{\mathcal{W}(\psi_1,\psi_2;r_0)}, \end{equation}
\begin{equation} \tilde{G}=\frac{\omega-U(r_0)\,k}{2{\rm \pi}\mathrm{i} r_0}\,\frac{\psi_1(\check{r})\, \psi_2(\hat{r})}{\mathcal{W}(\psi_1,\psi_2;r_0)}, \end{equation}where
 \begin{equation} \hat{r}=\max(r,r_0), \quad \check{r}=\min(r,r_0), \end{equation}
\begin{equation} \hat{r}=\max(r,r_0), \quad \check{r}=\min(r,r_0), \end{equation}
and once again  $\mathcal {W}(\psi _1,\psi _2;r)$ is the Wronskian of
$\mathcal {W}(\psi _1,\psi _2;r)$ is the Wronskian of  $\psi _1$ and
$\psi _1$ and  $\psi _2$. Using (2.29), this may be rewritten as
$\psi _2$. Using (2.29), this may be rewritten as
 \begin{equation} \tilde{G}=\frac{\omega-U(r^{*})\,k}{2{\rm \pi}\mathrm{i} r^{*}\,W(r^{*})}\, \frac{\psi_1(\check{r})\,\psi_2(\hat{r})}{C_1\hat{D}_2-\hat{C}_2D_1}, \quad \text{where } r^{*}=\max(1-h,r_0). \end{equation}
\begin{equation} \tilde{G}=\frac{\omega-U(r^{*})\,k}{2{\rm \pi}\mathrm{i} r^{*}\,W(r^{*})}\, \frac{\psi_1(\check{r})\,\psi_2(\hat{r})}{C_1\hat{D}_2-\hat{C}_2D_1}, \quad \text{where } r^{*}=\max(1-h,r_0). \end{equation}3.2. Analytic continuation behind the critical layer branch cut
The solution for  $\tilde {G}$ in (3.3) contains a branch cut along the critical layer
$\tilde {G}$ in (3.3) contains a branch cut along the critical layer  $k\in [{{\omega }/{M}},\infty )$. We now introduce the following additional notation. When evaluating a function
$k\in [{{\omega }/{M}},\infty )$. We now introduce the following additional notation. When evaluating a function  $f(k)$ on the branch cut, for
$f(k)$ on the branch cut, for  $k\in [{{\omega }/{M}},\infty )$, we denote
$k\in [{{\omega }/{M}},\infty )$, we denote
 \begin{equation} f^{+}(k) = \lim_{\varepsilon\to 0}f(k+\mathrm{i}\varepsilon), \quad f^{-}(k) = \lim_{\varepsilon\to 0}f(k-\mathrm{i}\varepsilon),\quad {\rm \Delta} f(k) = f^{+}(k) - f^{-}(k). \end{equation}
\begin{equation} f^{+}(k) = \lim_{\varepsilon\to 0}f(k+\mathrm{i}\varepsilon), \quad f^{-}(k) = \lim_{\varepsilon\to 0}f(k-\mathrm{i}\varepsilon),\quad {\rm \Delta} f(k) = f^{+}(k) - f^{-}(k). \end{equation}
Note that the definition of  ${\rm \Delta} f$ agrees with the use of
${\rm \Delta} f$ agrees with the use of  ${\rm \Delta}$ in (2.17), (2.24) and (2.25). By using these equations, we find that
${\rm \Delta}$ in (2.17), (2.24) and (2.25). By using these equations, we find that
 \begin{align} {\rm \Delta} \tilde{G}&={-}\frac{\omega-U(r^{*})\,k}{2\mathrm{i}{\rm \pi} r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2} \nonumber\\ &\quad\times \left[\frac{2\mathrm{i}{\rm \pi} A D_1\hat{D}_2\,\psi^{-}_1(\check{r})\, \psi^{-}_2(\hat{r})}{C_1^{-}\hat{D}_2-\hat{C}_2D_1}-\psi^{-}_1(\check{r})\,{\rm \Delta} \psi_2(\hat{r})-{\rm \Delta} \psi_1(\check{r})\,\psi^{-}_2(\hat{r})-{\rm \Delta} \psi_1(\check{r})\,{\rm \Delta} \psi_2(\hat{r})\right]. \end{align}
\begin{align} {\rm \Delta} \tilde{G}&={-}\frac{\omega-U(r^{*})\,k}{2\mathrm{i}{\rm \pi} r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2} \nonumber\\ &\quad\times \left[\frac{2\mathrm{i}{\rm \pi} A D_1\hat{D}_2\,\psi^{-}_1(\check{r})\, \psi^{-}_2(\hat{r})}{C_1^{-}\hat{D}_2-\hat{C}_2D_1}-\psi^{-}_1(\check{r})\,{\rm \Delta} \psi_2(\hat{r})-{\rm \Delta} \psi_1(\check{r})\,\psi^{-}_2(\hat{r})-{\rm \Delta} \psi_1(\check{r})\,{\rm \Delta} \psi_2(\hat{r})\right]. \end{align}
A typical branch cut, such as the branch cut in  $\sqrt {z-z_0}$, may be taken in any direction from the branch point
$\sqrt {z-z_0}$, may be taken in any direction from the branch point  $z_0$. The critical layer branch cut in the complex
$z_0$. The critical layer branch cut in the complex  $k$-plane is different, in that the choice of branch cut was forced upon us by the requirement that the solution be continuous in
$k$-plane is different, in that the choice of branch cut was forced upon us by the requirement that the solution be continuous in  $r$ for
$r$ for  $r\in [1-h,1]$. Nonetheless, noting from (3.5) that
$r\in [1-h,1]$. Nonetheless, noting from (3.5) that  ${\rm \Delta} \tilde {G}$ is a well-defined function for general complex
${\rm \Delta} \tilde {G}$ is a well-defined function for general complex  $k$, we may use (3.5) to analytically continue
$k$, we may use (3.5) to analytically continue  $\tilde {G}$ behind the critical layer branch cut. For real
$\tilde {G}$ behind the critical layer branch cut. For real  $\omega$, we therefore define the analytic continuation of
$\omega$, we therefore define the analytic continuation of  $\tilde {G}$ behind the branch cut into the lower half
$\tilde {G}$ behind the branch cut into the lower half  $k$-plane as
$k$-plane as
 \begin{equation} \tilde{G}^{+}(k) = \begin{cases} \tilde{G}(k), & \displaystyle {\rm Im} (k) > 0 \text{ or } {\rm Re}(k) < \dfrac{\omega}{M},\\ \tilde{G}(k)+{\rm \Delta} G(k), & \displaystyle {\rm Im} (k) < 0 \text{ and } {\rm Re}(k) > \dfrac{\omega}{M}. \end{cases} \end{equation}
\begin{equation} \tilde{G}^{+}(k) = \begin{cases} \tilde{G}(k), & \displaystyle {\rm Im} (k) > 0 \text{ or } {\rm Re}(k) < \dfrac{\omega}{M},\\ \tilde{G}(k)+{\rm \Delta} G(k), & \displaystyle {\rm Im} (k) < 0 \text{ and } {\rm Re}(k) > \dfrac{\omega}{M}. \end{cases} \end{equation}Similarly, we may rewrite (3.5) as
 \begin{align} {\rm \Delta} \tilde{G}&={-}\frac{\omega-U(r^{*})\,k}{2\mathrm{i}{\rm \pi} r^{*}\,W(r^{*})}\, \frac{1}{C^{+}_1\hat{D}_2-\hat{C}_2D_1-2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}\nonumber\\ &\quad\times\left[\frac{2\mathrm{i}{\rm \pi} A D_1\hat{D}_2\,\psi^{+}_1(\check{r})\, \psi^{+}_2(\hat{r})}{C_1^{+}\hat{D}_2-\hat{C}_2D_1}-\psi^{+}_1(\check{r})\,{\rm \Delta} \psi_2(\hat{r})-{\rm \Delta} \psi_1(\check{r})\,\psi^{+}_2(\hat{r})+{\rm \Delta} \psi_1(\check{r})\,{\rm \Delta} \psi_2(\hat{r})\right], \end{align}
\begin{align} {\rm \Delta} \tilde{G}&={-}\frac{\omega-U(r^{*})\,k}{2\mathrm{i}{\rm \pi} r^{*}\,W(r^{*})}\, \frac{1}{C^{+}_1\hat{D}_2-\hat{C}_2D_1-2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}\nonumber\\ &\quad\times\left[\frac{2\mathrm{i}{\rm \pi} A D_1\hat{D}_2\,\psi^{+}_1(\check{r})\, \psi^{+}_2(\hat{r})}{C_1^{+}\hat{D}_2-\hat{C}_2D_1}-\psi^{+}_1(\check{r})\,{\rm \Delta} \psi_2(\hat{r})-{\rm \Delta} \psi_1(\check{r})\,\psi^{+}_2(\hat{r})+{\rm \Delta} \psi_1(\check{r})\,{\rm \Delta} \psi_2(\hat{r})\right], \end{align}
which allows the analytic continuation of  $\tilde {G}$ into the upper half
$\tilde {G}$ into the upper half  $k$-plane,
$k$-plane,
 \begin{equation} \tilde{G}^{-}(k) = \begin{cases} \tilde{G}(k), & \displaystyle {\rm Im} (k) < 0 \text{ or } {\rm Re}(k) < \dfrac{\omega}{M},\\ \tilde{G}(k)-{\rm \Delta} G(k), & \displaystyle {\rm Im} (k) > 0 \text{ and } {\rm Re}(k) > \dfrac{\omega}{M}. \end{cases} \end{equation}
\begin{equation} \tilde{G}^{-}(k) = \begin{cases} \tilde{G}(k), & \displaystyle {\rm Im} (k) < 0 \text{ or } {\rm Re}(k) < \dfrac{\omega}{M},\\ \tilde{G}(k)-{\rm \Delta} G(k), & \displaystyle {\rm Im} (k) > 0 \text{ and } {\rm Re}(k) > \dfrac{\omega}{M}. \end{cases} \end{equation} The utility of these analytic continuations is not readily apparent. However, their use allows for poles of  $\tilde {G}$, corresponding to modal solutions of the homogeneous Pridmore-Brown equation, to be tracked behind the branch cut, and in particular, a possible hydrodynamic instability mode will later be found to be hidden behind the critical layer branch cut in certain cases. Their use also allows the deformation of integral contours behind the critical layer branch cut, as will be needed for the steepest descent contours needed for the large-
$\tilde {G}$, corresponding to modal solutions of the homogeneous Pridmore-Brown equation, to be tracked behind the branch cut, and in particular, a possible hydrodynamic instability mode will later be found to be hidden behind the critical layer branch cut in certain cases. Their use also allows the deformation of integral contours behind the critical layer branch cut, as will be needed for the steepest descent contours needed for the large- $x$ asymptotic evaluation of the inverse Fourier transform.
$x$ asymptotic evaluation of the inverse Fourier transform.
In what follows,  $k^{+}$ and
$k^{+}$ and  $k^{-}$ denote modal poles (see § 2.5) of only
$k^{-}$ denote modal poles (see § 2.5) of only  $\tilde {G}^{+}$ or
$\tilde {G}^{+}$ or  $\tilde {G}^{-}$ respectively.
$\tilde {G}^{-}$ respectively.
3.3. Inverting the Fourier transform
Having formulated  $\tilde {G}$ as the solution of the inhomogeneous Pridmore-Brown equation (2.5a), to recover the actual pressure perturbation
$\tilde {G}$ as the solution of the inhomogeneous Pridmore-Brown equation (2.5a), to recover the actual pressure perturbation  $\hat {p}(x,r,\theta )$, we are required to invert the Fourier transform and sum the Fourier series. For a fixed azimuthal mode
$\hat {p}(x,r,\theta )$, we are required to invert the Fourier transform and sum the Fourier series. For a fixed azimuthal mode  $m$, we invert the Fourier transform using the formula
$m$, we invert the Fourier transform using the formula
 \begin{equation} G(x,r;r_0,m)=\frac{1}{2{\rm \pi}}\int_{\mathcal{C}} \tilde{G}(r,r_0,k,m)\, \mathrm{e}^{-\mathrm{i} k x}\,{\rm d}k. \end{equation}
\begin{equation} G(x,r;r_0,m)=\frac{1}{2{\rm \pi}}\int_{\mathcal{C}} \tilde{G}(r,r_0,k,m)\, \mathrm{e}^{-\mathrm{i} k x}\,{\rm d}k. \end{equation}
Note, however, that the critical layer branch cut is located along the real  $k$-axis,
$k$-axis,  $k\in [{{\omega }/{M}},\infty )$. We are therefore required to be careful in choosing a suitable inversion contour
$k\in [{{\omega }/{M}},\infty )$. We are therefore required to be careful in choosing a suitable inversion contour  $\mathcal {C}$.
$\mathcal {C}$.
3.3.1. Choosing an inversion contour
In order to choose the correct Fourier inversion contour  $\mathcal {C}$, we appeal to the Briggs–Bers criterion (Briggs Reference Briggs1964; Bers Reference Bers1983). The Briggs–Bers criterion, summarized below, invokes the notion of causality: that the cause of the disturbance (the delta function forcing) should occur before the effect (the disturbance
$\mathcal {C}$, we appeal to the Briggs–Bers criterion (Briggs Reference Briggs1964; Bers Reference Bers1983). The Briggs–Bers criterion, summarized below, invokes the notion of causality: that the cause of the disturbance (the delta function forcing) should occur before the effect (the disturbance  $\hat {p}$), which is otherwise lost when considering a time-harmonic forcing, as we do here. A more in-depth description is available in many places in the literature (e.g. Brambley Reference Brambley2009, Appendix A).
$\hat {p}$), which is otherwise lost when considering a time-harmonic forcing, as we do here. A more in-depth description is available in many places in the literature (e.g. Brambley Reference Brambley2009, Appendix A).
In order to make use of the Briggs–Bers criterion, the rate of exponential growth of the solution must be bounded; that is, there must exist  $\varOmega,K>0$ such that if
$\varOmega,K>0$ such that if  $\textrm {Im} (\omega )<-\varOmega$, then
$\textrm {Im} (\omega )<-\varOmega$, then  $\tilde {G}$ is analytic for
$\tilde {G}$ is analytic for  $|\textrm {Im} (k)|< K$. For a given
$|\textrm {Im} (k)|< K$. For a given  $\omega$ with
$\omega$ with  $\textrm {Im} (\omega )<-\varOmega$, we take the
$\textrm {Im} (\omega )<-\varOmega$, we take the  $k$-inversion contour
$k$-inversion contour  $\mathcal {C}$ in (3.9) along the real
$\mathcal {C}$ in (3.9) along the real  $k$-axis, and map the locations of any singularities (e.g. poles, branch points, etc.). In order to find a correct integration contour for the real values of
$k$-axis, and map the locations of any singularities (e.g. poles, branch points, etc.). In order to find a correct integration contour for the real values of  $\omega$ that are of interest, the imaginary part of
$\omega$ that are of interest, the imaginary part of  $\omega$ is increased smoothly to
$\omega$ is increased smoothly to  $0$, and the locations of any singularities tracked throughout this process. During this process, the
$0$, and the locations of any singularities tracked throughout this process. During this process, the  $k$-inversion contour
$k$-inversion contour  $\mathcal {C}$ must be deformed smoothly in order to maintain analyticity; that is, no singularities must cross the
$\mathcal {C}$ must be deformed smoothly in order to maintain analyticity; that is, no singularities must cross the  $k$-inversion contour. Assuming that this process may be completed and
$k$-inversion contour. Assuming that this process may be completed and  $\textrm {Im} (\omega )$ increased to zero, the resulting
$\textrm {Im} (\omega )$ increased to zero, the resulting  $k$-inversion contour
$k$-inversion contour  $\mathcal {C}$ is the correct causal contour. Since for
$\mathcal {C}$ is the correct causal contour. Since for  $x<0$ the
$x<0$ the  $\exp \{-\mathrm {i} kx\}$ term is exponentially small as
$\exp \{-\mathrm {i} kx\}$ term is exponentially small as  $|k| \to \infty$ in the upper half
$|k| \to \infty$ in the upper half  $k$-plane, for
$k$-plane, for  $x<0$ we may close the contour with a large semicircular arc at infinity in the upper half
$x<0$ we may close the contour with a large semicircular arc at infinity in the upper half  $k$-plane, denoted
$k$-plane, denoted  $\mathcal {C}_>$. The resulting contours, for real
$\mathcal {C}_>$. The resulting contours, for real  $\omega$, are illustrated in figure 3 for a typical unstable case. The majority of singularities of
$\omega$, are illustrated in figure 3 for a typical unstable case. The majority of singularities of  $\tilde {G}$ are poles that do not cross the real
$\tilde {G}$ are poles that do not cross the real  $k$-axis as
$k$-axis as  $\textrm {Im} (\omega )$ is varied, and hence correspond to exponentially decaying disturbances away from the point mass source at
$\textrm {Im} (\omega )$ is varied, and hence correspond to exponentially decaying disturbances away from the point mass source at  $x=0$. The exception to these poles is the pole labelled
$x=0$. The exception to these poles is the pole labelled  $k^{+}$, which for this illustration originates in the lower half
$k^{+}$, which for this illustration originates in the lower half  $k$-plane for
$k$-plane for  $\textrm {Im} (\omega )$ sufficiently negative, and therefore belongs below the
$\textrm {Im} (\omega )$ sufficiently negative, and therefore belongs below the  $k$-inversion contour. This implies that this pole is seen downstream of the point mass source, for
$k$-inversion contour. This implies that this pole is seen downstream of the point mass source, for  $x>0$, despite having
$x>0$, despite having  $\textrm {Im} (k)>0$, and therefore corresponds to an exponentially growing instability. For a typical stable case, the situation is the same as shown in figure 3 but with the
$\textrm {Im} (k)>0$, and therefore corresponds to an exponentially growing instability. For a typical stable case, the situation is the same as shown in figure 3 but with the  $k^{+}$ pole not present. Irrespective of the stability, the critical layer, as described earlier, exists when
$k^{+}$ pole not present. Irrespective of the stability, the critical layer, as described earlier, exists when  $k/\omega = 1/U(r_c) \in [1/M, \infty ]$ for some critical radius
$k/\omega = 1/U(r_c) \in [1/M, \infty ]$ for some critical radius  $r_c$, and so is found in the lower half
$r_c$, and so is found in the lower half  $k$-plane for
$k$-plane for  $\textrm {Im} (\omega )<0$. Thus, as shown in figure 3, for
$\textrm {Im} (\omega )<0$. Thus, as shown in figure 3, for  $x>0$ in order to close
$x>0$ in order to close  $\mathcal {C}$ in the lower half
$\mathcal {C}$ in the lower half  $k$-plane, we must pass around the critical layer branch cut, denoted by the contour
$k$-plane, we must pass around the critical layer branch cut, denoted by the contour  $\mathcal {C}_b$, before closing in the lower half
$\mathcal {C}_b$, before closing in the lower half  $k$-plane with a semicircular arc denoted
$k$-plane with a semicircular arc denoted  $\mathcal {C}_>$. The contribution from integrating around the critical layer branch cut
$\mathcal {C}_>$. The contribution from integrating around the critical layer branch cut  $\mathcal {C}_b$ leads to the non-modal contribution of the critical layer, and is discussed in detail in § 3.3.3.
$\mathcal {C}_b$ leads to the non-modal contribution of the critical layer, and is discussed in detail in § 3.3.3.

Figure 3. Illustration of typical pole locations, branch cuts and inversion contours taken when an unstable  $k^{+}$ pole is present for real
$k^{+}$ pole is present for real  $\omega$. The inversion contour for
$\omega$. The inversion contour for  $\tilde {G}$ is labelled
$\tilde {G}$ is labelled  $\mathcal {C}$. (a) For
$\mathcal {C}$. (a) For  $x<0$, the contour is closed in the upper half-plane along the
$x<0$, the contour is closed in the upper half-plane along the  $\mathcal {C}_<$ contour. (b) For
$\mathcal {C}_<$ contour. (b) For  $x>0$, the contour is closed in the lower half-plane along the
$x>0$, the contour is closed in the lower half-plane along the  $\mathcal {C}_>$ contour, and around the critical layer branch cut along the
$\mathcal {C}_>$ contour, and around the critical layer branch cut along the  $\mathcal {C}_b$ contour. Contributing modal poles are indicated in blue.
$\mathcal {C}_b$ contour. Contributing modal poles are indicated in blue.
3.3.2. Contribution from the poles of  $\tilde {G}$
$\tilde {G}$

We may now write the integral around the closed contour as a sum of residues of poles:
 \begin{gather} \frac{1}{2{\rm \pi}}\int_{{\mathcal{C}\cup\mathcal{C}_<}} \tilde{G}(r,r_0,k,m)\,\mathrm{e}^{-\mathrm{i} k x}\, {\rm d}k = G(x,r;r_0,m) = \sum_{{j:\ {\rm Im} (k_j)>{\rm Im} (\mathcal{C})}} R(k_j) \quad \text{for } x<0, \end{gather}
\begin{gather} \frac{1}{2{\rm \pi}}\int_{{\mathcal{C}\cup\mathcal{C}_<}} \tilde{G}(r,r_0,k,m)\,\mathrm{e}^{-\mathrm{i} k x}\, {\rm d}k = G(x,r;r_0,m) = \sum_{{j:\ {\rm Im} (k_j)>{\rm Im} (\mathcal{C})}} R(k_j) \quad \text{for } x<0, \end{gather} \begin{gather}\frac{1}{2{\rm \pi}}\int_{{\mathcal{C}\cup\mathcal{C}_b\cup\mathcal{C}_>}} \tilde{G}(r,r_0,k,m)\,\mathrm{e}^{-\mathrm{i} k x}\, {\rm d}k = G(x,r;r_0,m) - I(x) = \sum_{{j:\ {\rm Im} (k_j) < {\rm Im} (\mathcal{C})}} R(k_j)\quad \text{for } x>0, \end{gather}
\begin{gather}\frac{1}{2{\rm \pi}}\int_{{\mathcal{C}\cup\mathcal{C}_b\cup\mathcal{C}_>}} \tilde{G}(r,r_0,k,m)\,\mathrm{e}^{-\mathrm{i} k x}\, {\rm d}k = G(x,r;r_0,m) - I(x) = \sum_{{j:\ {\rm Im} (k_j) < {\rm Im} (\mathcal{C})}} R(k_j)\quad \text{for } x>0, \end{gather}
where  $I(x)$ is the contribution from integrating around the critical layer branch cut contour
$I(x)$ is the contribution from integrating around the critical layer branch cut contour  $\mathcal {C}_b$ discussed in the next subsubsection,
$\mathcal {C}_b$ discussed in the next subsubsection,  $R(k_j)$ is the residue from a pole at
$R(k_j)$ is the residue from a pole at  $k_j$ discussed below, and the notation
$k_j$ discussed below, and the notation  $\textrm {Im} (k_j) > \textrm {Im} (\mathcal {C})$ is used to denote poles
$\textrm {Im} (k_j) > \textrm {Im} (\mathcal {C})$ is used to denote poles  $k_j$ lying above the inversion contour
$k_j$ lying above the inversion contour  $\mathcal {C}$.
$\mathcal {C}$.
The poles of  $\tilde {G}$ correspond to zeros of the denominator of
$\tilde {G}$ correspond to zeros of the denominator of  $\tilde {G}$, as given in (3.3). They can occur in two ways: as modal or non-modal poles. We consider the modal poles first. The modal poles occur as zeros of the term
$\tilde {G}$, as given in (3.3). They can occur in two ways: as modal or non-modal poles. We consider the modal poles first. The modal poles occur as zeros of the term  $C_1\hat {D}_2-\hat {C}_2 D_1=0$. As discussed in § 2.5, this occurs when both
$C_1\hat {D}_2-\hat {C}_2 D_1=0$. As discussed in § 2.5, this occurs when both  $\psi _1$ and
$\psi _1$ and  $\psi _2$ satisfy the boundary conditions at
$\psi _2$ satisfy the boundary conditions at  $r=0$ and
$r=0$ and  $r=1$. These modal poles can be classified further into acoustic modes and surface modes: acoustic modes are those for which
$r=1$. These modal poles can be classified further into acoustic modes and surface modes: acoustic modes are those for which  $\alpha$ in (2.11) has a small imaginary part, and correspond to functions that are oscillatory in
$\alpha$ in (2.11) has a small imaginary part, and correspond to functions that are oscillatory in  $r$; surface modes are those for which
$r$; surface modes are those for which  $\alpha$ has a significant imaginary part, and correspond to functions that decay exponentially away from the duct walls at
$\alpha$ has a significant imaginary part, and correspond to functions that decay exponentially away from the duct walls at  $r=1$. For different parameters, we may find a variety of surface modes, and two with which we will be particularly interested here will be denoted
$r=1$. For different parameters, we may find a variety of surface modes, and two with which we will be particularly interested here will be denoted  $k^{-}$ and
$k^{-}$ and  $k^{+}$. For further details of surface modes, the reader is referred to the existing literature (e.g. Rienstra Reference Rienstra2003; Brambley Reference Brambley2013).
$k^{+}$. For further details of surface modes, the reader is referred to the existing literature (e.g. Rienstra Reference Rienstra2003; Brambley Reference Brambley2013).
Since the modal poles occur as zeros of  $C_1\hat {D}_2-\hat {C}_2 D_1=0$, which we will assume are simple zeros, the contributions from the residues of these poles are given by
$C_1\hat {D}_2-\hat {C}_2 D_1=0$, which we will assume are simple zeros, the contributions from the residues of these poles are given by
 \begin{equation} R(k)={-}\mathrm{sgn}(x)\,\frac{\omega-U(r^{*})\,k}{2{\rm \pi} r^{*}\,W(r^{*})}\, \frac{\psi_1(\check{r})\,\psi_2(\hat{r})}{\displaystyle \frac{\partial {} }{\partial {k} } (C_1\hat{D}_2-\hat{C}_2D_1)}\,\mathrm{e}^{-\mathrm{i} k x}. \end{equation}
\begin{equation} R(k)={-}\mathrm{sgn}(x)\,\frac{\omega-U(r^{*})\,k}{2{\rm \pi} r^{*}\,W(r^{*})}\, \frac{\psi_1(\check{r})\,\psi_2(\hat{r})}{\displaystyle \frac{\partial {} }{\partial {k} } (C_1\hat{D}_2-\hat{C}_2D_1)}\,\mathrm{e}^{-\mathrm{i} k x}. \end{equation} The second type of poles are the non-modal poles, which occur when  $W(r^{*})=0$. These occur when we lose independence between
$W(r^{*})=0$. These occur when we lose independence between  $\tilde {p}_1$ and
$\tilde {p}_1$ and  $\tilde {p}_2$ at
$\tilde {p}_2$ at  $r^{*}$. Note from the formula (2.20) for
$r^{*}$. Note from the formula (2.20) for  $W(r)$ that
$W(r)$ that  $W(r^{*}) = 0$ implies that
$W(r^{*}) = 0$ implies that  $r^{*} = r_c^{+}$. Since
$r^{*} = r_c^{+}$. Since  $1-h\leq r^{*}\leq 1$, this can occur only when
$1-h\leq r^{*}\leq 1$, this can occur only when  $k$ is located on the critical layer branch cut. In what follows, we will refer to this non-modal pole as
$k$ is located on the critical layer branch cut. In what follows, we will refer to this non-modal pole as  $k_0$. Note that
$k_0$. Note that  $k_0$ is a function of the radial location of the point source
$k_0$ is a function of the radial location of the point source  $r_0$ (through
$r_0$ (through  $r^{*}$), which is unlike the modal poles for which
$r^{*}$), which is unlike the modal poles for which  $k_j$ is independent of the value of
$k_j$ is independent of the value of  $r_0$; this is one reason why this
$r_0$; this is one reason why this  $k_0$ pole is referred to as a non-modal pole. However, since our closed contour goes around the critical layer branch cut (along contour
$k_0$ pole is referred to as a non-modal pole. However, since our closed contour goes around the critical layer branch cut (along contour  $\mathcal {C}_b$), this pole is always excluded from the sum of residues in (3.10), and occurs only within the calculation of
$\mathcal {C}_b$), this pole is always excluded from the sum of residues in (3.10), and occurs only within the calculation of  $I(x)$, which we consider next.
$I(x)$, which we consider next.
3.3.3. Contribution from the critical layer branch cut
The contribution from the critical layer branch cut, including any non-modal pole  $k_0$ along the branch cut, is contained solely within the integral along the critical layer branch cut denoted
$k_0$ along the branch cut, is contained solely within the integral along the critical layer branch cut denoted  $\mathcal {C}_b$ in figure 3:
$\mathcal {C}_b$ in figure 3:
 \begin{equation} I(x) = \frac{-1}{2{\rm \pi}}\int_{\mathcal{C}_b} \tilde{G} \,\mathrm{e}^{-\mathrm{i} k x}\,\mathrm{d} k. \end{equation}
\begin{equation} I(x) = \frac{-1}{2{\rm \pi}}\int_{\mathcal{C}_b} \tilde{G} \,\mathrm{e}^{-\mathrm{i} k x}\,\mathrm{d} k. \end{equation}
However, as it stands, this integral for  $I(x)$ is oscillatory, owing to the
$I(x)$ is oscillatory, owing to the  $\mathrm {e}^{-\mathrm {i} kx}$ factor in the integrand, so it is difficult to accurately compute numerically. This is especially true for large values of
$\mathrm {e}^{-\mathrm {i} kx}$ factor in the integrand, so it is difficult to accurately compute numerically. This is especially true for large values of  $x$. Instead, it is helpful to deform the integral onto the steepest descent contour, for which
$x$. Instead, it is helpful to deform the integral onto the steepest descent contour, for which  $\mathrm {e}^{-\mathrm {i} kx}$ is exponentially decaying along the contour. This contour deformation has three benefits: first, it allows accurate numerical calculation of the integral; second, it allows the derivation of large-
$\mathrm {e}^{-\mathrm {i} kx}$ is exponentially decaying along the contour. This contour deformation has three benefits: first, it allows accurate numerical calculation of the integral; second, it allows the derivation of large- $x$ asymptotics using the method of steepest descent; and third, it brings insight into the various contributions that make up
$x$ asymptotics using the method of steepest descent; and third, it brings insight into the various contributions that make up  $I(x)$. In deforming the integration contour, however, we must analytically continue
$I(x)$. In deforming the integration contour, however, we must analytically continue  $\tilde {G}$ behind the branch cut (as described in § 3.2), and carefully deform around any poles and branch points. This is illustrated schematically in figure 4. Note that poles and branch points of
$\tilde {G}$ behind the branch cut (as described in § 3.2), and carefully deform around any poles and branch points. This is illustrated schematically in figure 4. Note that poles and branch points of  $\tilde {G}$ may exist behind the critical layer branch cut, and we must therefore use analytic continuations of
$\tilde {G}$ may exist behind the critical layer branch cut, and we must therefore use analytic continuations of  $\tilde {G}$; the reader is reminded that
$\tilde {G}$; the reader is reminded that  $\tilde {G}^{+}$ is the analytic continuation of
$\tilde {G}^{+}$ is the analytic continuation of  $\tilde {G}$ down behind the branch cut from above, while
$\tilde {G}$ down behind the branch cut from above, while  $\tilde {G}^{-}$ is the analytic continuation of
$\tilde {G}^{-}$ is the analytic continuation of  $\tilde {G}$ up behind the branch cut from below. Here, we use the notation that a pole of
$\tilde {G}$ up behind the branch cut from below. Here, we use the notation that a pole of  $\tilde {G}^{+}$ with
$\tilde {G}^{+}$ with  $\textrm {Re}(k)>{{\omega }/{M}}$ is denoted
$\textrm {Re}(k)>{{\omega }/{M}}$ is denoted  $k^{+}$, and a pole of
$k^{+}$, and a pole of  $\tilde {G}^{-}$ with
$\tilde {G}^{-}$ with  $\textrm {Re}(k)>{{\omega }/{M}}$ is denoted
$\textrm {Re}(k)>{{\omega }/{M}}$ is denoted  $k^{-}$. Thus a
$k^{-}$. Thus a  $k^{+}$ pole with
$k^{+}$ pole with  $\textrm {Im} (k^{+})<0$, or a
$\textrm {Im} (k^{+})<0$, or a  $k^{-}$ pole with
$k^{-}$ pole with  $\textrm {Im} (k^{-})>0$, are considered as being hidden behind the critical layer branch cut. In the schematic in figure 4, one
$\textrm {Im} (k^{-})>0$, are considered as being hidden behind the critical layer branch cut. In the schematic in figure 4, one  $k^{-}$ and one
$k^{-}$ and one  $k^{+}$ pole are present, both with
$k^{+}$ pole are present, both with  $\textrm {Im} (k)<0$, although this is not always the case; moreover, if present, the
$\textrm {Im} (k)<0$, although this is not always the case; moreover, if present, the  $k^{+}$ pole may interact with the integral contours around
$k^{+}$ pole may interact with the integral contours around  $k_<$ and
$k_<$ and  $k_>$, in addition to interacting with the integral contour around
$k_>$, in addition to interacting with the integral contour around  ${{\omega }/{M}}$ depicted in figure 4, depending on the location of the
${{\omega }/{M}}$ depicted in figure 4, depending on the location of the  $k^{+}$ pole.
$k^{+}$ pole.

Figure 4. (a) Illustration of the integration contour required for the computation of the contribution from the critical layer branch cut, understood by integrating above and below the branch cut. Possible poles of  $\tilde {G}^{-}$ and
$\tilde {G}^{-}$ and  $\tilde {G}^{+}$ are denoted
$\tilde {G}^{+}$ are denoted  $k^{-}$ and
$k^{-}$ and  $k^{+}$, respectively. (b) The integration contour after being transformed onto the steepest descent contour. Red lines behave as if evaluated below
$k^{+}$, respectively. (b) The integration contour after being transformed onto the steepest descent contour. Red lines behave as if evaluated below  ${{\omega }/{M}}$ (using
${{\omega }/{M}}$ (using  $\tilde {G}^{-}$); blue as if having been analytically continued around the
$\tilde {G}^{-}$); blue as if having been analytically continued around the  ${{\omega }/{M}}$ branch point; green as if having been analytically continued around the
${{\omega }/{M}}$ branch point; green as if having been analytically continued around the  ${{\omega }/{M}}$ and
${{\omega }/{M}}$ and  $k_<$ branch points; and purple as if having been analytically continued around all branch points, giving
$k_<$ branch points; and purple as if having been analytically continued around all branch points, giving  $\tilde {G}^{+}$. Note that we have been required to deform contours around the
$\tilde {G}^{+}$. Note that we have been required to deform contours around the  $k^{+}$ and
$k^{+}$ and  $k^{-}$ poles.
$k^{-}$ poles.
The steepest descent contours are where  $\mathrm {e}^{-\mathrm {i} kx}$ is decaying exponentially, i.e. towards
$\mathrm {e}^{-\mathrm {i} kx}$ is decaying exponentially, i.e. towards  $-\mathrm {i}\infty$ in the complex
$-\mathrm {i}\infty$ in the complex  $k$-plane. There is no difficulty deforming the contour at infinity, since
$k$-plane. There is no difficulty deforming the contour at infinity, since  $\mathrm {e}^{-\mathrm {i} kx}$ is exponentially small there (provided that
$\mathrm {e}^{-\mathrm {i} kx}$ is exponentially small there (provided that  $x>0$, which is the only case in which the critical layer branch cut contributes). Along the branch cut, there are up to three branch points singularities, denoted
$x>0$, which is the only case in which the critical layer branch cut contributes). Along the branch cut, there are up to three branch points singularities, denoted  ${{\omega }/{M}}$,
${{\omega }/{M}}$,  $k_<$ and
$k_<$ and  $k_>$ in figure 4, that must be deformed around. These occur because of the presence of the
$k_>$ in figure 4, that must be deformed around. These occur because of the presence of the  $\log (r-r_c^{+})$ term in
$\log (r-r_c^{+})$ term in  $\tilde {p}_2(r)$, and the presence of
$\tilde {p}_2(r)$, and the presence of  $\tilde {p}_2(1 - h)$,
$\tilde {p}_2(1 - h)$,  $\tilde {p}_2(r_0)$ and
$\tilde {p}_2(r_0)$ and  $\tilde {p}_2(r)$ in the expression for
$\tilde {p}_2(r)$ in the expression for  $\tilde {G}$; each of these terms leads to a branch point, respectively at
$\tilde {G}$; each of these terms leads to a branch point, respectively at  ${{\omega }/{M}}$, at
${{\omega }/{M}}$, at  $k_0$ corresponding to
$k_0$ corresponding to  $r_c^{+}(k_0) = r_0$, and at
$r_c^{+}(k_0) = r_0$, and at  $k_r$ corresponding to
$k_r$ corresponding to  $r_c^{+}(k_r) = r$.
$r_c^{+}(k_r) = r$.
Moreover,  $\tilde {G}$ possesses a pole at
$\tilde {G}$ possesses a pole at  $k_0$, which is exactly the non-modal pole referred to above, although there are no poles of
$k_0$, which is exactly the non-modal pole referred to above, although there are no poles of  $\tilde {G}$ at
$\tilde {G}$ at  ${{\omega }/{M}}$ or at
${{\omega }/{M}}$ or at  $k_r$. Details of these calculations are given in Appendix C. The branch point at
$k_r$. Details of these calculations are given in Appendix C. The branch point at  $k_r$ is not present when
$k_r$ is not present when  $r \leq 1-h$, and the pole and branch point at
$r \leq 1-h$, and the pole and branch point at  $k_0$ are not present when
$k_0$ are not present when  $r_0 \leq 1-h$. For simplicity in what follows, we denote
$r_0 \leq 1-h$. For simplicity in what follows, we denote  $k_< = \min \{k_0, k_r\}$ and
$k_< = \min \{k_0, k_r\}$ and  $k_> = \max \{k_0, k_r\}$, as depicted in figure 4.
$k_> = \max \{k_0, k_r\}$, as depicted in figure 4.
The total integral around the branch cut can therefore be found by summing these three integrals, subtracting any  $k^{-}$ contributions below the branch cut and adding any
$k^{-}$ contributions below the branch cut and adding any  $k^{+}$ contributions below the branch cut, and adding the pole residue at
$k^{+}$ contributions below the branch cut, and adding the pole residue at  $k_0$ calculated as if it was located above the branch cut. This results in
$k_0$ calculated as if it was located above the branch cut. This results in
 \begin{equation} I(x)=I_{{{\omega}/{M}}}(x)+I_0(x)+I_r(x)+R_0^{+}(k_0)+ \sum_{{{\rm Im} (k^{+})<0}}R^{+}(k^{+})-\sum_{{{\rm Im} (k^{-})<0}}R^{-}(k^{-}), \end{equation}
\begin{equation} I(x)=I_{{{\omega}/{M}}}(x)+I_0(x)+I_r(x)+R_0^{+}(k_0)+ \sum_{{{\rm Im} (k^{+})<0}}R^{+}(k^{+})-\sum_{{{\rm Im} (k^{-})<0}}R^{-}(k^{-}), \end{equation}
where  $R^{\pm }$ is the residue given in (3.11) evaluated using
$R^{\pm }$ is the residue given in (3.11) evaluated using  $\tilde {G}^{\pm }$. Here,
$\tilde {G}^{\pm }$. Here,  $R_0^{+}(k_0)$ is the residue of the non-modal pole
$R_0^{+}(k_0)$ is the residue of the non-modal pole  $k_0$ evaluated as if approached from above the branch cut, derived in § C.2 and given in (C20) as
$k_0$ evaluated as if approached from above the branch cut, derived in § C.2 and given in (C20) as
 \begin{equation} R_0^{+}(k_0) = \frac{2Mk_0^{2}(\omega-Mk_0)\,\mathrm{e}^{-\mathrm{i} k_0x}}{3{\rm \pi} r_0h^{2}\omega(C_1^{+}\hat{D}_2-\hat{C}_2D_1)} \times\begin{cases} \hat{D}_2\,\psi_1(r), & r < r_0,\\ D_1\,\psi_2(r), & r > r_0. \end{cases} \end{equation}
\begin{equation} R_0^{+}(k_0) = \frac{2Mk_0^{2}(\omega-Mk_0)\,\mathrm{e}^{-\mathrm{i} k_0x}}{3{\rm \pi} r_0h^{2}\omega(C_1^{+}\hat{D}_2-\hat{C}_2D_1)} \times\begin{cases} \hat{D}_2\,\psi_1(r), & r < r_0,\\ D_1\,\psi_2(r), & r > r_0. \end{cases} \end{equation}The steepest descent integrals are defined as
 \begin{equation} I_q(x)=\frac{1}{2{\rm \pi}\mathrm{i}}\int_0^{\infty} {\rm \Delta} \tilde{G}_q(k_q-\mathrm{i}\xi)\,\mathrm{e}^{-\mathrm{i}(k_q-\mathrm{i}\xi)x}\,\mathrm{d}\xi, \end{equation}
\begin{equation} I_q(x)=\frac{1}{2{\rm \pi}\mathrm{i}}\int_0^{\infty} {\rm \Delta} \tilde{G}_q(k_q-\mathrm{i}\xi)\,\mathrm{e}^{-\mathrm{i}(k_q-\mathrm{i}\xi)x}\,\mathrm{d}\xi, \end{equation}and the jumps across each of the steepest descent branch cuts are calculated in Appendix B to be
 \begin{align} {\rm \Delta} \tilde{G}_{{{\omega}/{M}}}&=\frac{-(\omega-U(r^{*})\,k) A }{ r^{*}\,W(r^{*})\, (C_1^{-}\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2)}\nonumber\\ &\quad\times\begin{cases} \dfrac{\hat{D}_2^{2}\,\psi_1^{-}(\check{r})\,\psi_1^{-}(\hat{r})}{{C_1^{-}\hat{D}_2-\hat{C}_2D_1}}, & \hat{r}<1 - h, \\ \dfrac{D_1\hat{D}_2\,\psi_1^{-}(\check{r})\,\psi_2^{-}(\hat{r})}{{C_1^{-}\hat{D}_2-\hat{C}_2D_1}}, & \check{r}<1 - h<\hat{r}, \\ \dfrac{D_1^{2}\,\psi_2^{-}(\check{r})\,\psi_2^{-}(\hat{r})}{{C_1^{-}\hat{D}_2-\hat{C}_2D_1}}, & 1 - h<\check{r}, \end{cases} \end{align}
\begin{align} {\rm \Delta} \tilde{G}_{{{\omega}/{M}}}&=\frac{-(\omega-U(r^{*})\,k) A }{ r^{*}\,W(r^{*})\, (C_1^{-}\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2)}\nonumber\\ &\quad\times\begin{cases} \dfrac{\hat{D}_2^{2}\,\psi_1^{-}(\check{r})\,\psi_1^{-}(\hat{r})}{{C_1^{-}\hat{D}_2-\hat{C}_2D_1}}, & \hat{r}<1 - h, \\ \dfrac{D_1\hat{D}_2\,\psi_1^{-}(\check{r})\,\psi_2^{-}(\hat{r})}{{C_1^{-}\hat{D}_2-\hat{C}_2D_1}}, & \check{r}<1 - h<\hat{r}, \\ \dfrac{D_1^{2}\,\psi_2^{-}(\check{r})\,\psi_2^{-}(\hat{r})}{{C_1^{-}\hat{D}_2-\hat{C}_2D_1}}, & 1 - h<\check{r}, \end{cases} \end{align} \begin{align}{\rm \Delta} \tilde{G}_< &= \frac{-(\omega-U(r^{*})k)}{ r^{*}\,W(r^{*})}\, \frac{ A D_1\,\tilde{p}_1(\check{r})\,\psi_2^{-}(\hat{r}) }{C_1^{-}\hat{D}_2-\hat{C}_2D_1+ 2\mathrm{i}{\rm \pi} A D_1\hat{D}_2}\,H(\check{r}-(1-h)), \end{align}
\begin{align}{\rm \Delta} \tilde{G}_< &= \frac{-(\omega-U(r^{*})k)}{ r^{*}\,W(r^{*})}\, \frac{ A D_1\,\tilde{p}_1(\check{r})\,\psi_2^{-}(\hat{r}) }{C_1^{-}\hat{D}_2-\hat{C}_2D_1+ 2\mathrm{i}{\rm \pi} A D_1\hat{D}_2}\,H(\check{r}-(1-h)), \end{align} \begin{align}{\rm \Delta} \tilde{G}_> &= \frac{-(\omega-U(r^{*})\,k)}{ r^{*}\,W(r^{*})} \frac{ A \hat{D}_2\,\psi_1^{-}(\check{r})\,\tilde{p}_1(\hat{r}) }{C_1^{-}\hat{D}_2-\hat{C}_2D_1+2\mathrm{i} {\rm \pi}A D_1\hat{D}_2}\,H(\hat{r}-(1-h)). \end{align}
\begin{align}{\rm \Delta} \tilde{G}_> &= \frac{-(\omega-U(r^{*})\,k)}{ r^{*}\,W(r^{*})} \frac{ A \hat{D}_2\,\psi_1^{-}(\check{r})\,\tilde{p}_1(\hat{r}) }{C_1^{-}\hat{D}_2-\hat{C}_2D_1+2\mathrm{i} {\rm \pi}A D_1\hat{D}_2}\,H(\hat{r}-(1-h)). \end{align} Note that  ${\rm \Delta} \tilde {G}_{{{\omega }/{M}}} + {\rm \Delta} \tilde {G}_< + {\rm \Delta} \tilde {G}_> = {\rm \Delta} \tilde {G} = \tilde {G}^{+} - \tilde {G}^{-}$. While these integrals are now amenable to numerical integration, additional understanding of the contribution from the three steepest descent contours may be gained by considering the large-
${\rm \Delta} \tilde {G}_{{{\omega }/{M}}} + {\rm \Delta} \tilde {G}_< + {\rm \Delta} \tilde {G}_> = {\rm \Delta} \tilde {G} = \tilde {G}^{+} - \tilde {G}^{-}$. While these integrals are now amenable to numerical integration, additional understanding of the contribution from the three steepest descent contours may be gained by considering the large- $x$ limit.
$x$ limit.
3.4. Far-field decay rates of the critical layer contribution
The critical layer branch cut contribution (3.13) contains integrals  $I_q(x)$ given by (3.15) that are amenable to asymptotic analysis in the limit
$I_q(x)$ given by (3.15) that are amenable to asymptotic analysis in the limit  $x \to \infty$, using the method of steepest descent. Having already deformed the integration contours onto the steepest descent contours, so that the integrands have had their
$x \to \infty$, using the method of steepest descent. Having already deformed the integration contours onto the steepest descent contours, so that the integrands have had their  $x$-dependent oscillation removed and are now exponentially decaying along the contour, we may directly apply Watson's lemma (Watson Reference Watson1918). If some function
$x$-dependent oscillation removed and are now exponentially decaying along the contour, we may directly apply Watson's lemma (Watson Reference Watson1918). If some function  $q(k)$ satisfies
$q(k)$ satisfies  $f(k_q-\mathrm {i}\xi )\sim B\xi ^{\nu }+O(\xi ^{\nu +1})$ to leading order for small
$f(k_q-\mathrm {i}\xi )\sim B\xi ^{\nu }+O(\xi ^{\nu +1})$ to leading order for small  $\xi$ with
$\xi$ with  $\nu >-1$, then Watson's lemma implies that for large
$\nu >-1$, then Watson's lemma implies that for large  $x$,
$x$,
 \begin{equation} \frac{1}{2\mathrm{i}{\rm \pi}}\int_0^{\infty} f(k_q-\mathrm{i}\xi)\, \mathrm{e}^{-\mathrm{i}(k_q-\mathrm{i}\xi)x}\,\mathrm{d}\xi\sim\frac{B\,\varGamma(\nu+1)\, \mathrm{e}^{-\mathrm{i} k_q x}}{2\mathrm{i}{\rm \pi} x^{\nu+1}}+O(x^{-(\nu+2)}), \end{equation}
\begin{equation} \frac{1}{2\mathrm{i}{\rm \pi}}\int_0^{\infty} f(k_q-\mathrm{i}\xi)\, \mathrm{e}^{-\mathrm{i}(k_q-\mathrm{i}\xi)x}\,\mathrm{d}\xi\sim\frac{B\,\varGamma(\nu+1)\, \mathrm{e}^{-\mathrm{i} k_q x}}{2\mathrm{i}{\rm \pi} x^{\nu+1}}+O(x^{-(\nu+2)}), \end{equation}
where  $\varGamma$ is the Gamma function, and in particular,
$\varGamma$ is the Gamma function, and in particular,  $\varGamma (\nu +1) = \nu !$ for integer
$\varGamma (\nu +1) = \nu !$ for integer  $\nu$. For each of the
$\nu$. For each of the  $I_q(x)$ integrals, this can then be interpreted as an algebraically decaying wave of phase velocity
$I_q(x)$ integrals, this can then be interpreted as an algebraically decaying wave of phase velocity  ${\omega }/{k_q}$.
${\omega }/{k_q}$.
In order to find the decay rates of the steepest descent contours, we are required to understand the behaviour of  $\psi _1(r,k_q-\mathrm {i}\xi )$ and
$\psi _1(r,k_q-\mathrm {i}\xi )$ and  $\psi _2(r,k_q-\mathrm {i}\xi )$ for small
$\psi _2(r,k_q-\mathrm {i}\xi )$ for small  $\xi$ at
$\xi$ at  ${r \in \{ 1-h,r,r_0,1\}}$. Details of this can be found in Appendix C. The result, given in (C13) and (C14), is that for
${r \in \{ 1-h,r,r_0,1\}}$. Details of this can be found in Appendix C. The result, given in (C13) and (C14), is that for  $k={{\omega }/{M}}-\mathrm {i}\xi$, as
$k={{\omega }/{M}}-\mathrm {i}\xi$, as  $\xi \to 0$ with
$\xi \to 0$ with  $\xi >0$, we find that
$\xi >0$, we find that
 \begin{equation} {\rm \Delta} \tilde{G}_{{{\omega}/{M}}}\sim\begin{cases} \xi^{3/2}, & r_0\leq 1-h, \\ \xi^{5/3}, & r_0>1-h. \end{cases} \end{equation}
\begin{equation} {\rm \Delta} \tilde{G}_{{{\omega}/{M}}}\sim\begin{cases} \xi^{3/2}, & r_0\leq 1-h, \\ \xi^{5/3}, & r_0>1-h. \end{cases} \end{equation}
By Watson's lemma, this results in a wave convected with the flow speed  $M = U(1-h)$ and decaying algebraically like
$M = U(1-h)$ and decaying algebraically like  $x^{-{5}/{2}}$ when the source is within the region of uniform flow, and like
$x^{-{5}/{2}}$ when the source is within the region of uniform flow, and like  $x^{-{7}/{2}}$ for a source located in the sheared flow; the pre-factor in each case is different, and is also governed by the above expressions.
$x^{-{7}/{2}}$ for a source located in the sheared flow; the pre-factor in each case is different, and is also governed by the above expressions.
In the case  $r_0>1-h$, the leading-order contribution to
$r_0>1-h$, the leading-order contribution to  ${\rm \Delta} \tilde {G}_0$ as
${\rm \Delta} \tilde {G}_0$ as  $k\to k_0$ is derived in § C.2 as
$k\to k_0$ is derived in § C.2 as
 \begin{equation} {\rm \Delta} \tilde{G}_0 = \frac{A\omega h^{2}\,U(r_0)}{6r_0Mk_0^{2}(r_0-1+h)}\, \frac{(k-k_0)^{2}}{C_1^{-}\hat{D}_2-\hat{C}_2D_1+2{\rm \pi}\mathrm{i} AD_1\hat{D}_2} \times\begin{cases} \hat{D}_2\,\psi_1^{-}(r), & r_0 > r,\\ D_1\,\psi_2^{-}(r), & r_0 < r. \end{cases} \end{equation}
\begin{equation} {\rm \Delta} \tilde{G}_0 = \frac{A\omega h^{2}\,U(r_0)}{6r_0Mk_0^{2}(r_0-1+h)}\, \frac{(k-k_0)^{2}}{C_1^{-}\hat{D}_2-\hat{C}_2D_1+2{\rm \pi}\mathrm{i} AD_1\hat{D}_2} \times\begin{cases} \hat{D}_2\,\psi_1^{-}(r), & r_0 > r,\\ D_1\,\psi_2^{-}(r), & r_0 < r. \end{cases} \end{equation}
By Watson's lemma, this results in a wave convected with the flow speed at the point source,  $U(r_0)$, and decaying algebraically like
$U(r_0)$, and decaying algebraically like  $x^{-3}$.
$x^{-3}$.
Finally, considering  ${\rm \Delta} \tilde {G}_r$ as
${\rm \Delta} \tilde {G}_r$ as  $k\to k_r$, it is found in § C.3 that
$k\to k_r$, it is found in § C.3 that
 \begin{align} {\rm \Delta}
\tilde{G}_r&\sim\frac{A(\omega-U(r^{*})\,k_r)\omega^{3}
h^{6}}{8r^{*}\,W(r^{*})\,M^{3}k_r^{6}(r-1+h)^{3}
}\,\frac{(k-k_r)^{3}}{C_1^{-}\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi}
A D_1\hat{D}_2}\nonumber\\ &\quad\times \begin{cases}
\hat{D}_2\,\psi_1^{-}(r_0), & r_0 < r,\\
D_1\,\psi_2^{-}(r_0), & r_0 > r. \end{cases} \end{align}
\begin{align} {\rm \Delta}
\tilde{G}_r&\sim\frac{A(\omega-U(r^{*})\,k_r)\omega^{3}
h^{6}}{8r^{*}\,W(r^{*})\,M^{3}k_r^{6}(r-1+h)^{3}
}\,\frac{(k-k_r)^{3}}{C_1^{-}\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi}
A D_1\hat{D}_2}\nonumber\\ &\quad\times \begin{cases}
\hat{D}_2\,\psi_1^{-}(r_0), & r_0 < r,\\
D_1\,\psi_2^{-}(r_0), & r_0 > r. \end{cases} \end{align}
By Watson's lemma, this results in a wave convected with the flow speed  $U(r)$ and decaying algebraically like
$U(r)$ and decaying algebraically like  $x^{-4}$.
$x^{-4}$.
It may be noted that the decay rates for  $I_0$ and
$I_0$ and  $I_r$ are the same as predicted for a linear boundary layer flow profile by Brambley et al. (Reference Brambley, Darau and Rienstra2012a). We now proceed to compare these results with the previous literature.
$I_r$ are the same as predicted for a linear boundary layer flow profile by Brambley et al. (Reference Brambley, Darau and Rienstra2012a). We now proceed to compare these results with the previous literature.
3.4.1. Comparisons with previous far-field scalings
Our results for the large- $x$ decay of the various components of the critical layer are compared to those predicted by Swinbanks (Reference Swinbanks1975) for a general flow profile, and those predicted by Brambley et al. (Reference Brambley, Darau and Rienstra2012a) for a constant-then-linear flow profile, in table 1. The
$x$ decay of the various components of the critical layer are compared to those predicted by Swinbanks (Reference Swinbanks1975) for a general flow profile, and those predicted by Brambley et al. (Reference Brambley, Darau and Rienstra2012a) for a constant-then-linear flow profile, in table 1. The  $I_0$ integral gives a wave with phase velocity equal to that of the mean flow at the location of the point mass source,
$I_0$ integral gives a wave with phase velocity equal to that of the mean flow at the location of the point mass source,  $U(r_0)$, provided that the point mass source is in a region of sheared flow,
$U(r_0)$, provided that the point mass source is in a region of sheared flow,  $r_0>1-h$. It can be observed in table 1 that agreement is seen in all three works for
$r_0>1-h$. It can be observed in table 1 that agreement is seen in all three works for  $r_0>1-h$. While Swinbanks (Reference Swinbanks1975) did not consider the other cases in detail, this work finds further agreement for the
$r_0>1-h$. While Swinbanks (Reference Swinbanks1975) did not consider the other cases in detail, this work finds further agreement for the  $I_r$ contribution with Brambley et al. (Reference Brambley, Darau and Rienstra2012a). In both the linear and quadratic shear flow cases, when the source is located within the region of sheared flow, the
$I_r$ contribution with Brambley et al. (Reference Brambley, Darau and Rienstra2012a). In both the linear and quadratic shear flow cases, when the source is located within the region of sheared flow, the  $I_0$ contribution is the slowest decaying term. When the source is located within the uniform flow region, the
$I_0$ contribution is the slowest decaying term. When the source is located within the uniform flow region, the  $I_{{{\omega }/{M}}}$ contribution is the slowest decaying term, although this is matched by the
$I_{{{\omega }/{M}}}$ contribution is the slowest decaying term, although this is matched by the  $I_r$ contribution for linear shear. It should noted, however, that when
$I_r$ contribution for linear shear. It should noted, however, that when  $r_0>1-h$, we have in addition the contribution of the non-modal
$r_0>1-h$, we have in addition the contribution of the non-modal  $k_0$ pole, which does not decay.
$k_0$ pole, which does not decay.
Table 1. Comparison of the different decay rates given for a general flow profile by Swinbanks (Reference Swinbanks1975) and for a linear boundary layer flow profile by Brambley et al. (Reference Brambley, Darau and Rienstra2012a) against those given here for a quadratic boundary layer flow profile.

The difference in the behaviour of the  $I_{{{\omega }/{M}}}$ integrals may be understood as having two causes. The first is the difference in behaviour of the constant
$I_{{{\omega }/{M}}}$ integrals may be understood as having two causes. The first is the difference in behaviour of the constant  $A$, given in general as
$A$, given in general as
 \begin{equation} A={-}\frac{1}{3}\left( {\frac{\omega^{2}}{M^{2}}+\frac{m^{2}}{r_c^{2}}} \right) \left( {\frac{U^{\prime\prime}(r_c)}{U^{\prime}(r_c)}-\frac{1}{r_c}} \right)-\frac{2m^{2}}{3r_c^{3}}. \end{equation}
\begin{equation} A={-}\frac{1}{3}\left( {\frac{\omega^{2}}{M^{2}}+\frac{m^{2}}{r_c^{2}}} \right) \left( {\frac{U^{\prime\prime}(r_c)}{U^{\prime}(r_c)}-\frac{1}{r_c}} \right)-\frac{2m^{2}}{3r_c^{3}}. \end{equation}
In the case of linear shear flow, the  $U^{\prime \prime }$ term is zero for
$U^{\prime \prime }$ term is zero for  $k\not ={{\omega }/{M}}$ and the resulting expression is
$k\not ={{\omega }/{M}}$ and the resulting expression is  $O(1)$ as
$O(1)$ as  $k\to {{\omega }/{M}}$. In the case of a quadratic shear boundary layer,
$k\to {{\omega }/{M}}$. In the case of a quadratic shear boundary layer,  $U^{\prime \prime }$ is non-zero and dominates
$U^{\prime \prime }$ is non-zero and dominates  $A$ as
$A$ as  $k\to {{\omega }/{M}}$, providing a factor
$k\to {{\omega }/{M}}$, providing a factor  $(k-{{\omega }/{M}})^{-{1}/{2}}$. The remainder of the differences between the decay rates is explained, for
$(k-{{\omega }/{M}})^{-{1}/{2}}$. The remainder of the differences between the decay rates is explained, for  $I_{{{\omega }/{M}}}$, by the fact that
$I_{{{\omega }/{M}}}$, by the fact that  $(r_c^{+}-(1-h))\sim (k-{{\omega }/{M}})^{{1}/{2}}$ in the quadratic shear case, whereas for linear shear,
$(r_c^{+}-(1-h))\sim (k-{{\omega }/{M}})^{{1}/{2}}$ in the quadratic shear case, whereas for linear shear,  $(r_c-(1-h))\sim (k-{{\omega }/{M}})$. For the
$(r_c-(1-h))\sim (k-{{\omega }/{M}})$. For the  $I_0$ and
$I_0$ and  $I_r$ contributions, where we do not have
$I_r$ contributions, where we do not have  $r_c^{+}\to 1-h$, all the other terms are equivalent between the linear and quadratic cases, therefore giving the same eventual asymptotics scalings, although the pre-factors may vary significantly. Further details are given in Appendix D.
$r_c^{+}\to 1-h$, all the other terms are equivalent between the linear and quadratic cases, therefore giving the same eventual asymptotics scalings, although the pre-factors may vary significantly. Further details are given in Appendix D.
4. Numerical results
In this section, the above analysis is illustrated with some numerical examples. The Frobenius series solutions  $\tilde {p}_1$ and
$\tilde {p}_1$ and  $\tilde {p}_2$ are computed by summing the terms of the series, as given in Appendix A, until a relative error of order
$\tilde {p}_2$ are computed by summing the terms of the series, as given in Appendix A, until a relative error of order  $10^{-16}$ is achieved, using the Matlab code in the supplementary material. In particular, this is more expensive numerically and prone to numerical rounding errors near the edge of the radius of convergence for each of the solutions, and care must therefore be taken to choose an accurate and efficient numerical implementation of
$10^{-16}$ is achieved, using the Matlab code in the supplementary material. In particular, this is more expensive numerically and prone to numerical rounding errors near the edge of the radius of convergence for each of the solutions, and care must therefore be taken to choose an accurate and efficient numerical implementation of  $\tilde {p}_1$ and
$\tilde {p}_1$ and  $\tilde {p}_2$ in terms of the Frobenius series solutions. The modal poles are found using a variant of the secant method, and have been confirmed against results using a finite difference method applied to the Pridmore-Brown equation (Brambley Reference Brambley2011b). When summing the residues of modal poles, all poles with
$\tilde {p}_2$ in terms of the Frobenius series solutions. The modal poles are found using a variant of the secant method, and have been confirmed against results using a finite difference method applied to the Pridmore-Brown equation (Brambley Reference Brambley2011b). When summing the residues of modal poles, all poles with  $|\textrm {Im} (k)|<400$ have been included.
$|\textrm {Im} (k)|<400$ have been included.
Throughout this section, we show results from four parameter sets, detailed in table 2. These parameter sets are inspired by values used in previous studies (Brambley et al. Reference Brambley, Darau and Rienstra2012a; Brambley Reference Brambley2013; Brambley & Gabard Reference Brambley and Gabard2016), and motivated by application to aeroengine intakes; in particular, parameter set B is intended to be typical of a rotor-alone tone at take-off, while parameter set C might represent the same type of mode during the landing approach.
Table 2. Parameter sets used for the following numerical results. The impedance is of mass–spring–damper type,  $Z(\omega )=R+\mathrm {i} \mu \omega -\mathrm {i} K/\omega$.
$Z(\omega )=R+\mathrm {i} \mu \omega -\mathrm {i} K/\omega$.

In § 4.1, we will explore the locations of the modal poles in the complex  $k$-plane. This section will particularly focus on the
$k$-plane. This section will particularly focus on the  $k^{\pm }$ modal poles discussed in § 3.3, including tracking these modal poles as they move behind the critical layer branch cut for certain parameters (by taking advantage of the ability of the Frobenius series solutions to analytically continue behind the critical layer branch cut). In § 4.2, we compare the various contributions from the critical layer branch cut described in § 3.3.3, including their large-
$k^{\pm }$ modal poles discussed in § 3.3, including tracking these modal poles as they move behind the critical layer branch cut for certain parameters (by taking advantage of the ability of the Frobenius series solutions to analytically continue behind the critical layer branch cut). In § 4.2, we compare the various contributions from the critical layer branch cut described in § 3.3.3, including their large- $x$ behaviour, and show that these agree with the predicted large-
$x$ behaviour, and show that these agree with the predicted large- $x$ behaviour from § 3.4. In § 4.3, the full solution in terms of
$x$ behaviour from § 3.4. In § 4.3, the full solution in terms of  $x$ and
$x$ and  $r$ is plotted, and these results are compared to the linear boundary layer case. Finally, in § 4.4, we investigate how the results vary as we vary parameters, including the frequency
$r$ is plotted, and these results are compared to the linear boundary layer case. Finally, in § 4.4, we investigate how the results vary as we vary parameters, including the frequency  $\omega$, the boundary layer thickness
$\omega$, the boundary layer thickness  $h$, the wall impedance
$h$, the wall impedance  $Z$, and the steady mean flow velocity
$Z$, and the steady mean flow velocity  $M$.
$M$.
4.1. Pole locations
The locations of the poles in the complex  $k$-plane for parameter sets A1 and A2 are plotted in figure 5. In addition to the usual acoustic modes (denoted as
$k$-plane for parameter sets A1 and A2 are plotted in figure 5. In addition to the usual acoustic modes (denoted as  $\ast$ in figure 5), one
$\ast$ in figure 5), one  $k^{+}$ and one
$k^{+}$ and one  $k^{-}$ pole is found for each parameter set. For parameter set A1, both the
$k^{-}$ pole is found for each parameter set. For parameter set A1, both the  $k^{+}$ and
$k^{+}$ and  $k^{-}$ poles are behind the critical layer branch cut, and so would not be found using conventional numerical methods, although the
$k^{-}$ poles are behind the critical layer branch cut, and so would not be found using conventional numerical methods, although the  $k^{+}$ pole does still contribute to the total pressure field through the critical layer branch cut contribution, as described in § 3.3.3. In contrast, for parameter set A2, the
$k^{+}$ pole does still contribute to the total pressure field through the critical layer branch cut contribution, as described in § 3.3.3. In contrast, for parameter set A2, the  $k^{+}$ pole is not behind the branch cut and takes the form of a standard modal pole, in this case a hydrodynamic instability surface wave. The stability of the modal poles is verified from the movement of the poles in the
$k^{+}$ pole is not behind the branch cut and takes the form of a standard modal pole, in this case a hydrodynamic instability surface wave. The stability of the modal poles is verified from the movement of the poles in the  $k$-plane as
$k$-plane as  $\textrm {Im} (\omega )$ is decreased from zero, following the Briggs–Bers criterion (shown in figures 5b,d); note that the critical layer branch cut also moves as a function of
$\textrm {Im} (\omega )$ is decreased from zero, following the Briggs–Bers criterion (shown in figures 5b,d); note that the critical layer branch cut also moves as a function of  $\textrm {Im} (\omega )$. Of particular note is that the
$\textrm {Im} (\omega )$. Of particular note is that the  $k^{+}$ pole for parameter set A1 emerges from behind the critical layer branch cut as
$k^{+}$ pole for parameter set A1 emerges from behind the critical layer branch cut as  $\textrm {Im} (\omega )$ is reduced from zero, becoming a standard modal pole provided that
$\textrm {Im} (\omega )$ is reduced from zero, becoming a standard modal pole provided that  $\textrm {Im} (\omega )$ is taken sufficiently negative.
$\textrm {Im} (\omega )$ is taken sufficiently negative.

Figure 5. Locations of the poles in the complex  $k$-plane for parameter sets A1 (a,b) and A2 (c,d). (a,c) For real
$k$-plane for parameter sets A1 (a,b) and A2 (c,d). (a,c) For real  $\omega$: acoustic modes with
$\omega$: acoustic modes with  $\textrm {Re}(k)<{{\omega }/{M}}$ (
$\textrm {Re}(k)<{{\omega }/{M}}$ ( $\ast$);
$\ast$);  $k^{+}$ poles (
$k^{+}$ poles ( $+$);
$+$);  $k^{-}$ poles (
$k^{-}$ poles ( $\times$); the critical layer branch cut (solid line); and branch points
$\times$); the critical layer branch cut (solid line); and branch points  ${{\omega }/{M}}$ and
${{\omega }/{M}}$ and  $k_0$ for
$k_0$ for  $r_0=1-{9h}/{10}$ (
$r_0=1-{9h}/{10}$ ( $\circ$). (b,d) Trajectories of poles for
$\circ$). (b,d) Trajectories of poles for  $-50 < \textrm {Im} (\omega ) < 0$. Poles coloured red (a,c) and solid lines (b,d) denote poles contributing to the modal sum. Poles coloured blue (a,c) and dashed lines (b,d) denote poles hidden behind the branch cut (which varies with
$-50 < \textrm {Im} (\omega ) < 0$. Poles coloured red (a,c) and solid lines (b,d) denote poles contributing to the modal sum. Poles coloured blue (a,c) and dashed lines (b,d) denote poles hidden behind the branch cut (which varies with  $\textrm {Im} (\omega )$) and do not contribute.
$\textrm {Im} (\omega )$) and do not contribute.
As discussed in § 3.3, when the  $k^{+}$ pole is located above the branch cut, it is unstable, with a contribution growing exponentially in
$k^{+}$ pole is located above the branch cut, it is unstable, with a contribution growing exponentially in  $x$. When the
$x$. When the  $k^{+}$ pole is located below the branch cut, we do not see its contribution to the modal sum directly, but instead it contributes as part of the branch cut integral, as seen when deforming onto the steepest descent contour. In this latter case, we would observe a contribution that decays in
$k^{+}$ pole is located below the branch cut, we do not see its contribution to the modal sum directly, but instead it contributes as part of the branch cut integral, as seen when deforming onto the steepest descent contour. In this latter case, we would observe a contribution that decays in  $x$. In both examples, the
$x$. In both examples, the  $k^{-}$ pole is located above the branch cut and does not contribute towards the Fourier inversion. In the event that this
$k^{-}$ pole is located above the branch cut and does not contribute towards the Fourier inversion. In the event that this  $k^{-}$ pole were located below the branch cut, its contribution would almost exactly cancel the critical layer branch cut contribution, again seen by deforming onto the steepest descent contour; however, the
$k^{-}$ pole were located below the branch cut, its contribution would almost exactly cancel the critical layer branch cut contribution, again seen by deforming onto the steepest descent contour; however, the  $k^{-}$ pole has not been found below the branch cut for any parameters considered here, unlike in the linear boundary layer profile case, which is investigated further in § 4.3.
$k^{-}$ pole has not been found below the branch cut for any parameters considered here, unlike in the linear boundary layer profile case, which is investigated further in § 4.3.
Also plotted in figure 5 is the critical layer branch cut for  $k > {{\omega }/{M}}$, together with the non-modal
$k > {{\omega }/{M}}$, together with the non-modal  $k_0$ pole, which is present only for a point mass source within the boundary layer,
$k_0$ pole, which is present only for a point mass source within the boundary layer,  $r_0>1-h$. The effects of these non-modal contributions are illustrated in the next subsection.
$r_0>1-h$. The effects of these non-modal contributions are illustrated in the next subsection.
4.2. Branch cut contributions
Figure 6 illustrates, for three different parameter sets (left to right columns), the differences between the three types of contributions occurring due to the presence of the critical layer branch cut: the sum of the three steepest descent contour integrals (row (i)); the  $k_0$ non-modal pole (row (ii)); and the
$k_0$ non-modal pole (row (ii)); and the  $k^{+}$ modal pole (row (iii)), which is located below the branch cut for all three parameter sets and therefore does not appear in the modal sum. The sum of these contributions is plotted in row (iv) of figure 6. Comparing the non-modal
$k^{+}$ modal pole (row (iii)), which is located below the branch cut for all three parameter sets and therefore does not appear in the modal sum. The sum of these contributions is plotted in row (iv) of figure 6. Comparing the non-modal  $k_0$ pole (row (ii)) to the sum of the three steepest descent integrals (row (i)), the non-modal
$k_0$ pole (row (ii)) to the sum of the three steepest descent integrals (row (i)), the non-modal  $k_0$ pole appears in all three parameter sets to have a small contribution compared to the sum of the three steepest descent integrals for small
$k_0$ pole appears in all three parameter sets to have a small contribution compared to the sum of the three steepest descent integrals for small  $x$, although it is comparable and even dominant for larger
$x$, although it is comparable and even dominant for larger  $x$. For small
$x$. For small  $x$, the
$x$, the  $k^{+}$ pole's contribution (row (iii)) is greater than those of the three steepest descent integrals (row (i)) and the non-modal
$k^{+}$ pole's contribution (row (iii)) is greater than those of the three steepest descent integrals (row (i)) and the non-modal  $k_0$ pole (row (iii)), particularly near the wall at
$k_0$ pole (row (iii)), particularly near the wall at  $r=1$. However, since the
$r=1$. However, since the  $k^{+}$ pole decays exponentially in
$k^{+}$ pole decays exponentially in  $x$, the non-modal pole will dominate the far-field behaviour of the critical layer branch cut, as can be seen by comparing row (ii) with row (iv).
$x$, the non-modal pole will dominate the far-field behaviour of the critical layer branch cut, as can be seen by comparing row (ii) with row (iv).

Figure 6. A comparison of the terms that contribute to the critical layer, for  $r_0=1-{4h}/{5}$. Plotted are the absolute values on a
$r_0=1-{4h}/{5}$. Plotted are the absolute values on a  $\log _{10}$ scale. Left to right: parameter sets A1, B and C. Top to bottom: (i) the sum of the three steepest descent contours,
$\log _{10}$ scale. Left to right: parameter sets A1, B and C. Top to bottom: (i) the sum of the three steepest descent contours,  $I_{{{\omega }/{M}}}+I_{r}+I_0$; (ii) the non-modal
$I_{{{\omega }/{M}}}+I_{r}+I_0$; (ii) the non-modal  $k_0$ pole; (iii) the contribution of the
$k_0$ pole; (iii) the contribution of the  $k^{+}$ pole located behind the branch cut; and (iv) the total contribution from integrating around the critical layer branch cut, obtained by summing (i)–(iii).
$k^{+}$ pole located behind the branch cut; and (iv) the total contribution from integrating around the critical layer branch cut, obtained by summing (i)–(iii).
We can look further at how these contributions vary as we adjust the location of the source, shown in figure 7. The contribution of the non-modal  $k_0$ pole is seen to be far smaller for the case when
$k_0$ pole is seen to be far smaller for the case when  $r_0$ is closest to
$r_0$ is closest to  $1-h$ (figure 7a). Note that there is no non-modal
$1-h$ (figure 7a). Note that there is no non-modal  $k_0$ pole when
$k_0$ pole when  $r_0 \leq 1-h$, in which case the dominant contribution will be from the
$r_0 \leq 1-h$, in which case the dominant contribution will be from the  $k^{+}$ pole and the steepest descent contours, which in all cases decay to zero.
$k^{+}$ pole and the steepest descent contours, which in all cases decay to zero.

Figure 7. Plots of the real part of the contribution from integrating around the branch cut ( $\textrm {Re}(p(x,r))$) for parameter set C, excluding any
$\textrm {Re}(p(x,r))$) for parameter set C, excluding any  $k^{+}$ pole located below the branch cut. Solid lines indicate positive values, dashed lines indicate negative values: (a)
$k^{+}$ pole located below the branch cut. Solid lines indicate positive values, dashed lines indicate negative values: (a)  $r_0=1-{9h}/{10}$; (b)
$r_0=1-{9h}/{10}$; (b)  $r_0=1-{3h}/{5}$.
$r_0=1-{3h}/{5}$.
Figure 8 compares the numerically computed steepest descent integrals with their predicted far-field rates of decay given in § 3.4, and good agreement is seen in all cases.

Figure 8. Plotted for parameter set A1 are  $|I_{{{\omega }/{M}}}|$ (top),
$|I_{{{\omega }/{M}}}|$ (top),  $|I_r|$ (middle), and
$|I_r|$ (middle), and  $|I_0|$ (bottom). The point source is at
$|I_0|$ (bottom). The point source is at  $r_0=1-{4h}/{5}$ (a) and
$r_0=1-{4h}/{5}$ (a) and  $r_0=0.4$ (b). Solid lines correspond to radial locations
$r_0=0.4$ (b). Solid lines correspond to radial locations  $r=0.2$,
$r=0.2$,  $0.6$,
$0.6$,  $1-{9h}/{10}$ and
$1-{9h}/{10}$ and  $1-{3h}/{5}$. The dashed line is the predicted far-field rate of decay according to § 3.4. Note that for
$1-{3h}/{5}$. The dashed line is the predicted far-field rate of decay according to § 3.4. Note that for  $r=0.2$ and
$r=0.2$ and  $r=0.6$,
$r=0.6$,  $I_r$ is identically zero, since the branch point does not exist. Similarly for
$I_r$ is identically zero, since the branch point does not exist. Similarly for  $r_0=0.4$ and
$r_0=0.4$ and  $I_0$.
$I_0$.
4.3. Full Fourier inversion
We now consider the full Fourier inversion, including the contribution from all the modal poles as well as the critical layer branch cut contribution considered above. Figure 9 compares a snapshot in the near field (for small  $x$ values) of the wave field generated by only the stable modal poles (figure 9a) with the full solution including the critical layer and any unstable
$x$ values) of the wave field generated by only the stable modal poles (figure 9a) with the full solution including the critical layer and any unstable  $k^{+}$ pole (figure 9b). When the
$k^{+}$ pole (figure 9b). When the  $k^{+}$ pole is a convective instability, it clearly dominates the solution sufficiently far downstream, as it grows exponentially in
$k^{+}$ pole is a convective instability, it clearly dominates the solution sufficiently far downstream, as it grows exponentially in  $x$. In these near-field plots, the critical layer often appears negligible compared with the modal sum, although in some circumstances it can have a significant effect, as shown by the plots of case C.
$x$. In these near-field plots, the critical layer often appears negligible compared with the modal sum, although in some circumstances it can have a significant effect, as shown by the plots of case C.

Figure 9. Plotting the real values of the different contributions. (a) Just the contribution for the stable modal poles. (b) The full Fourier inversion, which also includes the  $k^{+}$ pole. The parameter sets used from top to bottom are A1, A2, B and C, with
$k^{+}$ pole. The parameter sets used from top to bottom are A1, A2, B and C, with  $r_0=1-{4h}/{5}$ in each case. In case A2, the
$r_0=1-{4h}/{5}$ in each case. In case A2, the  $k^{+}$ pole is a convective instability. In cases A1, B and C, the
$k^{+}$ pole is a convective instability. In cases A1, B and C, the  $k^{+}$ pole is located behind the branch cut.
$k^{+}$ pole is located behind the branch cut.
In comparison, figure 10 shows the behaviour outside the near field for the three stable cases from figure 9, plotting the amplitude of oscillations  $|p|$ on a logarithmic scale. In all cases, since the modal sum decays exponentially, in the far field, the dominant contribution is from the critical layer, and this is often true from only one or two radii downstream of the point source.
$|p|$ on a logarithmic scale. In all cases, since the modal sum decays exponentially, in the far field, the dominant contribution is from the critical layer, and this is often true from only one or two radii downstream of the point source.

Figure 10. The absolute value of pressure on a log scale ( $10\log _{10}(|p|$)) over a longer range of axial distances downstream of the point source. (a) Just the contribution for the modal poles. (b) Modal poles plus the three steepest descent contours and the
$10\log _{10}(|p|$)) over a longer range of axial distances downstream of the point source. (a) Just the contribution for the modal poles. (b) Modal poles plus the three steepest descent contours and the  $k_0$ non-modal pole. (c) The full Fourier inversion, which also includes the
$k_0$ non-modal pole. (c) The full Fourier inversion, which also includes the  $k^{+}$ pole. The parameter sets used from top to bottom are A1, B and C, with
$k^{+}$ pole. The parameter sets used from top to bottom are A1, B and C, with  $r_0=1-{4h}/{5}$ in each case. In each case, the
$r_0=1-{4h}/{5}$ in each case. In each case, the  $k^{+}$ pole is located behind the branch cut. In the bottom left plot, the contribution from the modal poles is too small to be shown (with
$k^{+}$ pole is located behind the branch cut. In the bottom left plot, the contribution from the modal poles is too small to be shown (with  $10\log _{10}(|p|) < -78$).
$10\log _{10}(|p|) < -78$).
Figure 11 compares the wave field generated in a quadratic boundary layer with the wave field in a linear boundary layer profile (as studied by Brambley et al. Reference Brambley, Darau and Rienstra2012a). The wave fields are reasonably similar, although when the point mass source is within the boundary layer, significant differences are seen downstream. This is related to whether the  $k^{+}$ pole is located above or below the branch cut. In the quadratic case, the
$k^{+}$ pole is located above or below the branch cut. In the quadratic case, the  $k^{+}$ pole always contributes, whether it is behind the branch cut or not, while the
$k^{+}$ pole always contributes, whether it is behind the branch cut or not, while the  $k^{-}$ is always found above the branch cut and so is not seen to contribute at all. With the linear boundary layer, instead we find a
$k^{-}$ is always found above the branch cut and so is not seen to contribute at all. With the linear boundary layer, instead we find a  $k^{-}$ pole that can be located either above or below the branch cut, while the
$k^{-}$ pole that can be located either above or below the branch cut, while the  $k^{+}$ pole is instead located above in all cases. The result of this is that the linear boundary layer profile is always found to be convectively unstable, while the quadratic boundary layer profile is found to be unstable only if the boundary layer is sufficiently thin. Even when both flow profiles give rise to a convective instability, we can see in figure 11 that the growth rates of the instabilities can be significantly different.
$k^{+}$ pole is instead located above in all cases. The result of this is that the linear boundary layer profile is always found to be convectively unstable, while the quadratic boundary layer profile is found to be unstable only if the boundary layer is sufficiently thin. Even when both flow profiles give rise to a convective instability, we can see in figure 11 that the growth rates of the instabilities can be significantly different.

Figure 11. Plotting the real values of the full solution for a quadratic boundary layer flow profile (a) and a linear boundary layer flow profile (b) (from Brambley et al. Reference Brambley, Darau and Rienstra2012a). From left to right, parameters are: set A1 with  $r_0=0.4$; set A1 with
$r_0=0.4$; set A1 with  $r_0=1-{4h}/{5}=0.96$; set A2 with
$r_0=1-{4h}/{5}=0.96$; set A2 with  $r_0=0.4$; and set A2 with
$r_0=0.4$; and set A2 with  $r_0=1-{4h}/{5}=0.9992$.
$r_0=1-{4h}/{5}=0.9992$.
The change in nature of the  $k^{+}$ pole in the quadratic case from convective instability to stable is clearly of significant importance. We therefore finally consider the variation of the solution as various parameters of interest are varied.
$k^{+}$ pole in the quadratic case from convective instability to stable is clearly of significant importance. We therefore finally consider the variation of the solution as various parameters of interest are varied.
4.4. Variation of results with changing parameters
The variation of the acoustic modal sum is relatively well understood, so in this subsection we concentrate on the variation of the  $k^{+}$ and
$k^{+}$ and  $k^{-}$ modal poles as various parameters are varied. This includes whether
$k^{-}$ modal poles as various parameters are varied. This includes whether  $\textrm {Im} (k^{+})>0$, corresponding to a convective instability, or
$\textrm {Im} (k^{+})>0$, corresponding to a convective instability, or  $\textrm {Im} (k^{+})<0$, corresponding to a stable modal pole hidden behind the branch cut that nonetheless contributes to the modal sum through the branch cut contribution. We also consider whether
$\textrm {Im} (k^{+})<0$, corresponding to a stable modal pole hidden behind the branch cut that nonetheless contributes to the modal sum through the branch cut contribution. We also consider whether  $\textrm {Im} (k^{-})>0$, meaning the pole is not included, or
$\textrm {Im} (k^{-})>0$, meaning the pole is not included, or  $\textrm {Im} (k^{-})<0$, in which case the pole is included as part of the contribution of the critical layer branch cut.
$\textrm {Im} (k^{-})<0$, in which case the pole is included as part of the contribution of the critical layer branch cut.
Figure 12 illustrates how the  $k^{+}$ and
$k^{+}$ and  $k^{-}$ modal poles vary with boundary layer thickness, frequency, impedance and Mach number. In particular, taking wider boundary layers and lower mean flow velocities appears to stabilize the
$k^{-}$ modal poles vary with boundary layer thickness, frequency, impedance and Mach number. In particular, taking wider boundary layers and lower mean flow velocities appears to stabilize the  $k^{+}$ pole, moving it to below the branch cut. In contrast, thinner boundary layers and higher mean flow velocities lead to convective instability. The value of the impedance is also seen to alter the stability of the solution, with, in this case, a range of values of
$k^{+}$ pole, moving it to below the branch cut. In contrast, thinner boundary layers and higher mean flow velocities lead to convective instability. The value of the impedance is also seen to alter the stability of the solution, with, in this case, a range of values of  $\textrm {Im} (Z)$ being unstable, and nearly hard-walled values of
$\textrm {Im} (Z)$ being unstable, and nearly hard-walled values of  $|\textrm {Im} (Z)|\to \infty$ being stable, as is seen from the
$|\textrm {Im} (Z)|\to \infty$ being stable, as is seen from the  $k^{+}$ poles movement in figure 12(b). The variation of stability as the frequency is varied remains unclear, although it appears likely from figure 12(c) that for certain parameters, there would be a finite range of frequencies for which the
$k^{+}$ poles movement in figure 12(b). The variation of stability as the frequency is varied remains unclear, although it appears likely from figure 12(c) that for certain parameters, there would be a finite range of frequencies for which the  $k^{+}$ pole would be unstable, while for frequencies either higher or lower than this range, the
$k^{+}$ pole would be unstable, while for frequencies either higher or lower than this range, the  $k^{+}$ pole would be stable. Note also from figure 12 that in all cases, the
$k^{+}$ pole would be stable. Note also from figure 12 that in all cases, the  $k^{-}$ pole is located above the branch cut and so does not contribute to either the modal sum or the critical layer branch cut.
$k^{-}$ pole is located above the branch cut and so does not contribute to either the modal sum or the critical layer branch cut.

Figure 12. Motion of the modal poles for parameter set C as one parameter is varied (arrows show the motion as the parameter is increased): (a) varying  $h$ in
$h$ in  $(0.001,0.5)$; (b) varying
$(0.001,0.5)$; (b) varying  $\textrm {Im} (Z)$ in
$\textrm {Im} (Z)$ in  $(-\infty,\infty )$, with a dot showing hard-walled values; (c) varying
$(-\infty,\infty )$, with a dot showing hard-walled values; (c) varying  $\textrm {Re}(\omega )$ in
$\textrm {Re}(\omega )$ in  $(1,50)$; and (d) varying
$(1,50)$; and (d) varying  $M$ in
$M$ in  $(0.06,0.9)$. Modal positions for parameter set C are denoted
$(0.06,0.9)$. Modal positions for parameter set C are denoted  $+$ (
$+$ ( $k^{+}$) and
$k^{+}$) and  $\times$ (
$\times$ ( $k^{-}$). Dashed lines denote a pole hidden behind the branch cut. Note that (c) and (d) use a rescaled
$k^{-}$). Dashed lines denote a pole hidden behind the branch cut. Note that (c) and (d) use a rescaled  $k$-plane in order for the branch cut to remain fixed as
$k$-plane in order for the branch cut to remain fixed as  $\omega$ or
$\omega$ or  $M$ is varied.
$M$ is varied.
5. Conclusions
In this work, we have considered a cylindrical duct containing a parallel mean flow that is uniform everywhere except within a boundary layer of thickness  $h$ near the wall. Within the boundary layer, which need not be thin, the flow has a quadratic profile and satisfies the no-slip boundary condition at the duct wall, whilst maintaining a
$h$ near the wall. Within the boundary layer, which need not be thin, the flow has a quadratic profile and satisfies the no-slip boundary condition at the duct wall, whilst maintaining a  $C^{1}$ continuous flow. For such a flow profile, irrespective of the the thickness of the boundary layer, a solution of the Pridmore-Brown equation has been constructed making use of two Frobenius series expansions, valid for any wavenumber
$C^{1}$ continuous flow. For such a flow profile, irrespective of the the thickness of the boundary layer, a solution of the Pridmore-Brown equation has been constructed making use of two Frobenius series expansions, valid for any wavenumber  $k$. This enables the evaluation of the Green's function of the Pridmore-Brown equation, which is found to consist of a sum of the usual acoustic duct modes plus a non-modal contribution from the critical layer branch cut. Full source code is provided in the supplementary material to evaluate all solutions presented here.
$k$. This enables the evaluation of the Green's function of the Pridmore-Brown equation, which is found to consist of a sum of the usual acoustic duct modes plus a non-modal contribution from the critical layer branch cut. Full source code is provided in the supplementary material to evaluate all solutions presented here.
In this work, we have aimed to construct the Green's function solutions, which is equivalent to the solution for a point mass source in the linearized Euler equations. The Green's function is in some sense the general solution, as the solution subject to any forcing can be written as an integral over the Green's function, suitably weighted. Because of this, any behaviour the equations are capable of must necessarily be demonstrated in the Green's function solution, so once the behaviour of the Green's function is understood, the equations cannot hold any further surprises. This is particularly important in this case, considering that the Green's function solution has been shown to include non-modal contributions, such as the critical layer branch cut, that cannot be investigated clearly using other methods, such as eigenfunction methods that capture only the modal contributions.
The Frobenius series method employed here has two particular advantages over other numerical methods to solve the Pridmore-Brown equation (such as finite differences, e.g. Brambley Reference Brambley2011b). The first is that the Frobenius series, being a series solution about the critical points of the equation, is at its most accurate near the critical layer singularity found in the Pridmore-Brown equation. This allows for accurate numerical solutions near the critical layer, required for the integration around the critical layer singularity and its associated branch cut to evaluate their effect on the resulting pressure field. Other numerical methods such as finite difference are typically at their least accurate near the critical layer (Brambley et al. Reference Brambley, Darau and Rienstra2012a). Moreover, the Frobenius series solution makes explicit the branch cut along the critical layer, allowing for analytic continuation of the solution behind the branch cut. This allows for tracking hydrodynamic instability surface wave modes as they become stable and enter the critical layer (as seen figure 12), which makes it significantly easier to track the boundary between stable and unstable behaviour.
An advantage of considering this particular quadratic flow profile is that the origins of the critical layer are on a more solid footing. For the linear flow profile (Brambley et al. Reference Brambley, Darau and Rienstra2012a), the critical layer was due to the cylindrical geometry of the duct, whereas in general, the critical layer is due to a non-zero second derivative of the sheared flow profile. This also allows comparison to previous works, such as that of Swinbanks (Reference Swinbanks1975) and Félix & Pagneux (Reference Félix and Pagneux2007). Further, as the quadratic flow profile has a continuous first derivative, we have also been able to investigate the specific case of a point mass source at the boundary between uniform and sheared flow,  $r_0=1-h$, and we find that this case retains the same behaviour as a point mass source within the region of uniform flow. In contrast, for the linear flow profile,
$r_0=1-h$, and we find that this case retains the same behaviour as a point mass source within the region of uniform flow. In contrast, for the linear flow profile,  $r_0\to 1-h$ is a singular limit. We therefore believe the results of the quadratic boundary layer flow profile to be in some ways typical of solutions for a general boundary layer profile.
$r_0\to 1-h$ is a singular limit. We therefore believe the results of the quadratic boundary layer flow profile to be in some ways typical of solutions for a general boundary layer profile.
The final solution for the Green's function for a point mass source was found to consist of a number of contributions. This solution is dominated, both upstream, and in the near field downstream too, by the sum of modal poles. The modal poles, including acoustic and surface modes, are well known, and are typically used in mode-matching numerical methods. One complication found here with the surface modes is that a particular surface mode, here labelled  $k^{+}$, is found to sometimes disappear behind the critical layer branch cut (or, in other words, into the continuous spectrum). The contribution of this mode is not lost, however, and is in effect added to the critical layer contribution. In general, the modal poles present difficulty only in establishing which poles contribute upstream (
$k^{+}$, is found to sometimes disappear behind the critical layer branch cut (or, in other words, into the continuous spectrum). The contribution of this mode is not lost, however, and is in effect added to the critical layer contribution. In general, the modal poles present difficulty only in establishing which poles contribute upstream ( $x<0$) or downstream (
$x<0$) or downstream ( $x>0$) of the source. This can be established through application of the Briggs–Bers criterion, as summarized in § 3.3.
$x>0$) of the source. This can be established through application of the Briggs–Bers criterion, as summarized in § 3.3.
The effect of the critical layer, the focus of this work, always contributes downstream of the source, and is the dominant contribution to the far-field pressure downstream of the point mass source. This contribution, which results from integrating the Fourier inversion contour around the critical layer branch cut, may be viewed in three parts. The first contribution is from the  $k_0$ non-modal pole, present only when
$k_0$ non-modal pole, present only when  $r_0>1-h$, which does not decay with distance from the point source and is therefore dominant in the far field downstream of the source. This contribution is similar to that described in the linear flow profile case (Brambley et al. Reference Brambley, Darau and Rienstra2012a), and may be interpreted similarly as a hydrodynamic vorticity wave generated from the point mass source interacting with the sheared mean flow, travelling downstream with phase velocity equal to the local fluid velocity
$r_0>1-h$, which does not decay with distance from the point source and is therefore dominant in the far field downstream of the source. This contribution is similar to that described in the linear flow profile case (Brambley et al. Reference Brambley, Darau and Rienstra2012a), and may be interpreted similarly as a hydrodynamic vorticity wave generated from the point mass source interacting with the sheared mean flow, travelling downstream with phase velocity equal to the local fluid velocity  $U(r_0)$. The second contribution to the critical layer is from the steepest descent non-oscillatory integrals
$U(r_0)$. The second contribution to the critical layer is from the steepest descent non-oscillatory integrals  $I_{{{\omega }/{M}}}$,
$I_{{{\omega }/{M}}}$,  $I_r$ and
$I_r$ and  $I_0$, which are the result of accounting for the branch points coming from the critical points of the Pridmore-Brown equation. These contributions have phase speeds equal to, respectively, the uniform flow speed
$I_0$, which are the result of accounting for the branch points coming from the critical points of the Pridmore-Brown equation. These contributions have phase speeds equal to, respectively, the uniform flow speed  $M$,
$M$,  $U(r)$ and
$U(r)$ and  $U(r_0)$, and decay algebraically in the far field downstream of the point source. The final contribution is from any modal pole that is hiding behind the branch cut, such as from a
$U(r_0)$, and decay algebraically in the far field downstream of the point source. The final contribution is from any modal pole that is hiding behind the branch cut, such as from a  $k^{+}$ surface wave mode that has stabilized by moving into the critical layer branch cut from above. These poles, while looking very much like ordinary modal poles, are not able to be found by traditional numerical methods, as they require analytically continuing behind the critical layer branch cut. While these poles decay exponentially with distance downstream of the point source, their decay rate may be slower than any other acoustic modal pole, depending on the parameters used, and so may still be significant in the far field; this was seen for parameter set C in figure 10.
$k^{+}$ surface wave mode that has stabilized by moving into the critical layer branch cut from above. These poles, while looking very much like ordinary modal poles, are not able to be found by traditional numerical methods, as they require analytically continuing behind the critical layer branch cut. While these poles decay exponentially with distance downstream of the point source, their decay rate may be slower than any other acoustic modal pole, depending on the parameters used, and so may still be significant in the far field; this was seen for parameter set C in figure 10.
The  $k^{+}$ modal pole may be present as a hydrodynamic instability surface wave, or as a stable mode included within the critical layer branch cut contribution. Interestingly, in the linear flow profile case (Brambley et al. Reference Brambley, Darau and Rienstra2012a), this mode was always an instability and was never hidden behind the critical layer branch cut. From the results of figure 12, we expect that this mode is stable for quadratic flow boundary layer profiles when the boundary layer is sufficiently thick or the flow speed is sufficiently slow, although the specific stability boundary also depends on the impedance
$k^{+}$ modal pole may be present as a hydrodynamic instability surface wave, or as a stable mode included within the critical layer branch cut contribution. Interestingly, in the linear flow profile case (Brambley et al. Reference Brambley, Darau and Rienstra2012a), this mode was always an instability and was never hidden behind the critical layer branch cut. From the results of figure 12, we expect that this mode is stable for quadratic flow boundary layer profiles when the boundary layer is sufficiently thick or the flow speed is sufficiently slow, although the specific stability boundary also depends on the impedance  $Z$ and frequency
$Z$ and frequency  $\omega$.
$\omega$.
For the linear flow profile boundary layer (Brambley et al. Reference Brambley, Darau and Rienstra2012a), a  $k^{-}$ pole was found below and behind the critical layer branch cut that contributed to the critical layer. For the quadratic flow profile boundary layer here, this
$k^{-}$ pole was found below and behind the critical layer branch cut that contributed to the critical layer. For the quadratic flow profile boundary layer here, this  $k^{-}$ pole is always found to be above the critical layer branch cut, and so never contributes. We believe that this
$k^{-}$ pole is always found to be above the critical layer branch cut, and so never contributes. We believe that this  $k^{-}$ pole was an artefact of the unphysical linear boundary layer profile, although we have no direct way of demonstrating this. Incidentally, for the linear flow profile boundary layer, Brambley et al. (Reference Brambley, Darau and Rienstra2012a) argued that the
$k^{-}$ pole was an artefact of the unphysical linear boundary layer profile, although we have no direct way of demonstrating this. Incidentally, for the linear flow profile boundary layer, Brambley et al. (Reference Brambley, Darau and Rienstra2012a) argued that the  $k^{+}$ pole could never be behind the critical layer branch cut, as this would cause an unphysical discontinuity in the final solution; in fact, it is found here that when the
$k^{+}$ pole could never be behind the critical layer branch cut, as this would cause an unphysical discontinuity in the final solution; in fact, it is found here that when the  $k^{+}$ pole is behind the branch cut, the unphysical discontinuity in the
$k^{+}$ pole is behind the branch cut, the unphysical discontinuity in the  $k^{+}$ pole contribution is exactly cancelled by the
$k^{+}$ pole contribution is exactly cancelled by the  $I_r$ steepest descent contour contribution, resulting in a continuous solution.
$I_r$ steepest descent contour contribution, resulting in a continuous solution.
The various decay rates of the components of the critical layer have been predicted previously by Swinbanks (Reference Swinbanks1975) and Brambley et al. (Reference Brambley, Darau and Rienstra2012a); a summary can be found in table 1. Swinbanks (Reference Swinbanks1975) considered only the contribution from waves with phase velocity  $U(r_0)$, which are present only for a point mass source within the region of sheared flow,
$U(r_0)$, which are present only for a point mass source within the region of sheared flow,  $r_0 > 1-h$. Swinbanks (Reference Swinbanks1975) predicted these to behave as a constant amplitude plus a decay as
$r_0 > 1-h$. Swinbanks (Reference Swinbanks1975) predicted these to behave as a constant amplitude plus a decay as  $O(x^{-3})$ in the far field. Brambley et al. (Reference Brambley, Darau and Rienstra2012a) found the same result, despite Swinbanks (Reference Swinbanks1975) considering a two-dimensional flow in a rectilinear duct with an arbitrary flow profile, and Brambley et al. (Reference Brambley, Darau and Rienstra2012a) considering only a constant-then-linear flow profile in a three-dimensional cylindrical duct; in particular, Swinbanks (Reference Swinbanks1975) emphasized the importance of the non-zero second derivative of the mean flow profile, which is identically zero for a constant-then-linear flow profile. As a result, it would not have been unsurprising if these results were different. Here, the same result is again found, with the constant amplitude coming from the
$O(x^{-3})$ in the far field. Brambley et al. (Reference Brambley, Darau and Rienstra2012a) found the same result, despite Swinbanks (Reference Swinbanks1975) considering a two-dimensional flow in a rectilinear duct with an arbitrary flow profile, and Brambley et al. (Reference Brambley, Darau and Rienstra2012a) considering only a constant-then-linear flow profile in a three-dimensional cylindrical duct; in particular, Swinbanks (Reference Swinbanks1975) emphasized the importance of the non-zero second derivative of the mean flow profile, which is identically zero for a constant-then-linear flow profile. As a result, it would not have been unsurprising if these results were different. Here, the same result is again found, with the constant amplitude coming from the  $k_0$ non-modal pole, and the algebraic decay coming from the
$k_0$ non-modal pole, and the algebraic decay coming from the  $I_0$ integral. This shows that this agreement is not by coincidence. For the critical layer contribution that propagates with phase velocity
$I_0$ integral. This shows that this agreement is not by coincidence. For the critical layer contribution that propagates with phase velocity  $U(r)$ when
$U(r)$ when  $r$ is within the boundary layer, we also find here the same result as given by Brambley et al. (Reference Brambley, Darau and Rienstra2012a) of an
$r$ is within the boundary layer, we also find here the same result as given by Brambley et al. (Reference Brambley, Darau and Rienstra2012a) of an  $O(x^{-4})$ far-field decay.
$O(x^{-4})$ far-field decay.
The critical layer also contributes a term with phase velocity equal to the uniform flow velocity  $M$, which is always present, and which dominates the other critical layer contributions in the far field whenever the point mass source is in the uniform flow region,
$M$, which is always present, and which dominates the other critical layer contributions in the far field whenever the point mass source is in the uniform flow region,  $r_0<1-h$. The amplitude of this term can decay at two different rates depending on the location of the source. When the source is within the uniform flow, a decay rate of
$r_0<1-h$. The amplitude of this term can decay at two different rates depending on the location of the source. When the source is within the uniform flow, a decay rate of  $O(x^{-{5}/{2}})$ is found, while when the source is within the sheared flow, we instead have a faster rate of decay of
$O(x^{-{5}/{2}})$ is found, while when the source is within the sheared flow, we instead have a faster rate of decay of  $O(x^{-{7}/{2}})$. These results differ from those found by Brambley et al. (Reference Brambley, Darau and Rienstra2012a) in the linear flow profile boundary layer case, despite corresponding to the same physical behaviour. This difference may be understood as result of both the difference in the overall shape of the flow profile, and the importance of the second derivative of the flow. Indeed, we conjecture that these scalings will differ depending on the flow profile within the boundary layer, and an example discussion of this for
$O(x^{-{7}/{2}})$. These results differ from those found by Brambley et al. (Reference Brambley, Darau and Rienstra2012a) in the linear flow profile boundary layer case, despite corresponding to the same physical behaviour. This difference may be understood as result of both the difference in the overall shape of the flow profile, and the importance of the second derivative of the flow. Indeed, we conjecture that these scalings will differ depending on the flow profile within the boundary layer, and an example discussion of this for  $n$-polynomial flow profiles is given in Appendix D.
$n$-polynomial flow profiles is given in Appendix D.
In most aeroacoustic analyses, particularly those involving mode matching, the critical layer is either implicitly or explicitly ignored. The work here suggests that this may be valid in the near field provided that not all acoustic modes are cut-off, although even in the near field the critical layer can be dominant if all acoustic modes are cut-off, as shown in figure 9 for parameter set C. However, it is certainly not valid to ignore the critical layer downstream in the far field, when the critical layer will be the dominant contribution. Moreover, without considering the critical layer, it would not be apparent whether a barely stable hydrodynamic surface wave is present only just hidden behind the critical layer branch cut (or, in other words, within the continuous spectrum).
There are a number of possible avenues for further investigation following on from this work. One of practical importance concerns whether the hydrodynamic surface wave  $k^{+}$ can be predicted accurately using a surface wave dispersion relation (e.g. Brambley Reference Brambley2013), especially when the
$k^{+}$ can be predicted accurately using a surface wave dispersion relation (e.g. Brambley Reference Brambley2013), especially when the  $k^{+}$ pole is located behind the critical layer branch cut; our experience in this work has been that it cannot, at least with the simplified surface wave dispersion relations that assume a thin boundary layer with a linear flow profile, although more complicated surface wave dispersion relations may prove more accurate. Another possibility for further investigation is to consider parameters on the stability boundary when the
$k^{+}$ pole is located behind the critical layer branch cut; our experience in this work has been that it cannot, at least with the simplified surface wave dispersion relations that assume a thin boundary layer with a linear flow profile, although more complicated surface wave dispersion relations may prove more accurate. Another possibility for further investigation is to consider parameters on the stability boundary when the  $k^{+}$ pole is neutrally stable. In this case, the
$k^{+}$ pole is neutrally stable. In this case, the  $k^{+}$ pole is exactly located on the critical layer branch cut, and there would also exist a value of
$k^{+}$ pole is exactly located on the critical layer branch cut, and there would also exist a value of  $r_0$ for which the non-modal
$r_0$ for which the non-modal  $k_0$ pole and the
$k_0$ pole and the  $k^{+}$ pole overlap; this case has been explicitly excluded here. While this may seem a rather contrived case, a distributed sound source would correspond to an integral of source strength over all values of
$k^{+}$ pole overlap; this case has been explicitly excluded here. While this may seem a rather contrived case, a distributed sound source would correspond to an integral of source strength over all values of  $r_0$, so
$r_0$, so  $k_0$ and
$k_0$ and  $k^{+}$ coinciding could be expected to occur for any parameters leading to exact neutral stability. One could also extend this problem to a non-constant mean density and sound speed making use of (2.5). For a given mean density profile
$k^{+}$ coinciding could be expected to occur for any parameters leading to exact neutral stability. One could also extend this problem to a non-constant mean density and sound speed making use of (2.5). For a given mean density profile  $\rho _0(r)$ and sound speed profile
$\rho _0(r)$ and sound speed profile  $c_0(r)$, one could still construct a solution of the resulting Pridmore-Brown equation, taking careful notice of the potentially complex roots of
$c_0(r)$, one could still construct a solution of the resulting Pridmore-Brown equation, taking careful notice of the potentially complex roots of  $c_0(r)$. It would still be possible to construct a solution using the Frobenius series solutions so long as these are not double roots or of higher order, and
$c_0(r)$. It would still be possible to construct a solution using the Frobenius series solutions so long as these are not double roots or of higher order, and  ${\rho _0^{\prime }(r)}/{\rho (r)}$ has at most regular singularities in the complex
${\rho _0^{\prime }(r)}/{\rho (r)}$ has at most regular singularities in the complex  $r$-plane. The critical layer branch cut would still occur in identical form to that seen in our work (except in the case where these singularities occur at
$r$-plane. The critical layer branch cut would still occur in identical form to that seen in our work (except in the case where these singularities occur at  $r=r_c^+$), although the resulting scaling in the various limits seen above may vary. When calculating the scalings in the various limits above, the work given here would provide a suitable outline for the approach to be taken. Finally, the critical layer may be regularized by considering either viscosity or weak nonlinearity, and it would be interesting to investigate how the results presented here are recovered in the inviscid or small-amplitude limits. In particular, for viscous thin boundary layers, the critical layer is recovered as a caustic in the high-frequency limit (Brambley Reference Brambley2011a).
$r=r_c^+$), although the resulting scaling in the various limits seen above may vary. When calculating the scalings in the various limits above, the work given here would provide a suitable outline for the approach to be taken. Finally, the critical layer may be regularized by considering either viscosity or weak nonlinearity, and it would be interesting to investigate how the results presented here are recovered in the inviscid or small-amplitude limits. In particular, for viscous thin boundary layers, the critical layer is recovered as a caustic in the high-frequency limit (Brambley Reference Brambley2011a).
Supplementary material
The Matlab source code used to produce the data plotted here is available at https://doi.org/10.1017/jfm.2022.753.
Acknowledgements
M.J.K. was supported in this work through the University of Warwick MASDOC Doctoral Training Centre, and gratefully acknowledges their support. E.J.B. gratefully acknowledges the support of a Royal Society University Research Fellowship (UF150695 and RGF/EA/180284). R.L. was supported in this work through a research internship funded by the Royal Society (RGF/EA/180284), and would also like to thank the CAPES Foundation, Ministry of Education of Brazil, for the award of a BRAFITEC scholarship. The contribution of M.R. was supported by an EPSRC UROP undergraduate research summer internship (2015, DAMTP, University of Cambridge).
Declaration of interests
The authors report no conflict of interest.
Appendix A. Frobenius series solutions of the Pridmore-Brown equation with a quadratic mean flow profile
In this appendix, we use a Frobenius expansion method to solve the homogeneous Pridmore-Brown equation (2.9), i.e.
 \begin{equation} \tilde{p}^{\prime\prime}+\left( {\frac{2k U^{\prime}}{\omega-U(r)\,k}+ \frac{1}{r}} \right)\tilde{p}^{\prime}+\left( {(\omega-U(r)\,k)^{2}-k^{2}-\frac{m^{2}}{r^{2}}} \right)\tilde{p}=0, \end{equation}
\begin{equation} \tilde{p}^{\prime\prime}+\left( {\frac{2k U^{\prime}}{\omega-U(r)\,k}+ \frac{1}{r}} \right)\tilde{p}^{\prime}+\left( {(\omega-U(r)\,k)^{2}-k^{2}-\frac{m^{2}}{r^{2}}} \right)\tilde{p}=0, \end{equation}for the flow profile (2.8),
 \begin{equation} U(r)=\begin{cases}M, & 0\leq r\leq 1-h, \\ M\left(1-\left(1-\dfrac{1-r}{h}\right)^{2}\right), & 1-h\leq r \leq 1,\end{cases} \end{equation}
\begin{equation} U(r)=\begin{cases}M, & 0\leq r\leq 1-h, \\ M\left(1-\left(1-\dfrac{1-r}{h}\right)^{2}\right), & 1-h\leq r \leq 1,\end{cases} \end{equation}
in the quadratic flow region  $1-h\leq r \leq 1$. The Pridmore-Brown equation (A1) has regular singularities at
$1-h\leq r \leq 1$. The Pridmore-Brown equation (A1) has regular singularities at  $r=0$ and
$r=0$ and  $r=r_c$, where
$r=r_c$, where  $\omega - U(r_c)\,k=0$. For the quadratic flow profile (A2), the solutions of
$\omega - U(r_c)\,k=0$. For the quadratic flow profile (A2), the solutions of  $\omega -U(r_c)\,k=0$ are given by (2.12),
$\omega -U(r_c)\,k=0$ are given by (2.12),
 \begin{equation} r_c^{{\pm}}=1-h\pm Q, \quad \text{where } Q=h\sqrt{1-\frac{\omega}{Mk}}. \end{equation}
\begin{equation} r_c^{{\pm}}=1-h\pm Q, \quad \text{where } Q=h\sqrt{1-\frac{\omega}{Mk}}. \end{equation}
This results in the Pridmore-Brown equation in the quadratic flow region  $1-h\leq r\leq 1$ being given by
$1-h\leq r\leq 1$ being given by
 \begin{equation} \tilde{p}^{\prime\prime}+\left( {\frac{2}{r-r_c^{+}}+\frac{2}{r-r_c^{-}}+ \frac{1}{r}} \right)\tilde{p}^{\prime}+\left( {\frac{M^{2}k^{2}}{h^{4}}\,(r-r_c^{+})^{2}(r-r_c^{-})^{2} -k^{2}-\frac{m^{2}}{r^{2}}} \right)\tilde{p}=0. \end{equation}
\begin{equation} \tilde{p}^{\prime\prime}+\left( {\frac{2}{r-r_c^{+}}+\frac{2}{r-r_c^{-}}+ \frac{1}{r}} \right)\tilde{p}^{\prime}+\left( {\frac{M^{2}k^{2}}{h^{4}}\,(r-r_c^{+})^{2}(r-r_c^{-})^{2} -k^{2}-\frac{m^{2}}{r^{2}}} \right)\tilde{p}=0. \end{equation}
We choose  $\textrm {Re}(Q)\geq 0$ and consider the Frobenius expansion about
$\textrm {Re}(Q)\geq 0$ and consider the Frobenius expansion about  $r = r_c^{+}$.
$r = r_c^{+}$.
A.1. Frobenius expansion about $r=r_c^{+}$

Following Brambley et al. (Reference Brambley, Darau and Rienstra2012a), we propose a Frobenius expansion about the regular singularity  $r_c^{+}$,
$r_c^{+}$,
 \begin{equation} \tilde{p}(r)=\sum_{n=0}^{\infty} a_n(r-r_c^{+})^{n+\sigma}, \quad \text{with } a_0 \neq 0. \end{equation}
\begin{equation} \tilde{p}(r)=\sum_{n=0}^{\infty} a_n(r-r_c^{+})^{n+\sigma}, \quad \text{with } a_0 \neq 0. \end{equation}
We substitute (A5) into (A4) and expand using a Laurent series. Specifying that  $a_0 \neq 0$ results in the requirement that
$a_0 \neq 0$ results in the requirement that  $\sigma (\sigma -3)=0$. By Fuchs’ theorem (Teschl Reference Teschl2012), this gives a pair of linearly independent solutions of the form
$\sigma (\sigma -3)=0$. By Fuchs’ theorem (Teschl Reference Teschl2012), this gives a pair of linearly independent solutions of the form
 \begin{gather} \tilde{p}_{c1}(r)=\sum_{n=0}^{\infty} a_n (r-r_c^{+})^{n+3}, \end{gather}
\begin{gather} \tilde{p}_{c1}(r)=\sum_{n=0}^{\infty} a_n (r-r_c^{+})^{n+3}, \end{gather} \begin{gather}\tilde{p}_{c2}(r)=A\,\tilde{p}_{c1}(r)\log(r-r_c^{+})+\sum_{n=0}^{\infty} b_n(r-r_c^{+})^{n}. \end{gather}
\begin{gather}\tilde{p}_{c2}(r)=A\,\tilde{p}_{c1}(r)\log(r-r_c^{+})+\sum_{n=0}^{\infty} b_n(r-r_c^{+})^{n}. \end{gather}
The coefficients  $a_n$ and
$a_n$ and  $b_n$ are then given by setting the remaining terms of the Laurent expansion of (A4) to zero, resulting in the recurrence relations
$b_n$ are then given by setting the remaining terms of the Laurent expansion of (A4) to zero, resulting in the recurrence relations
 \begin{align} a_n&=\frac{1}{n(n+3)}\left[ k^{2}a_{n-2}-\frac{k^{2}M^{2}}{h^{4}}\,({a_{n-6}+ 4Qa_{n-5}+4Q^{2}a_{n-4}})\right.\nonumber\\ &\quad-\sum_{j=0}^{n-1}({-}1)^{j}\,(n+2-j)\,a_{n-1-j} \left( {\frac{1}{(r_c^{+})^{j+1}}-\frac{2}{(2Q)^{j+1}}} \right)\nonumber\\ &\quad \left.{}+m^{2}\sum_{j=0}^{n-2}\frac{({-}1)^{j}}{(r_c^{+})^{j+2}}\,(j +1)\,a_{n-2-j} \right], \end{align}
\begin{align} a_n&=\frac{1}{n(n+3)}\left[ k^{2}a_{n-2}-\frac{k^{2}M^{2}}{h^{4}}\,({a_{n-6}+ 4Qa_{n-5}+4Q^{2}a_{n-4}})\right.\nonumber\\ &\quad-\sum_{j=0}^{n-1}({-}1)^{j}\,(n+2-j)\,a_{n-1-j} \left( {\frac{1}{(r_c^{+})^{j+1}}-\frac{2}{(2Q)^{j+1}}} \right)\nonumber\\ &\quad \left.{}+m^{2}\sum_{j=0}^{n-2}\frac{({-}1)^{j}}{(r_c^{+})^{j+2}}\,(j +1)\,a_{n-2-j} \right], \end{align} \begin{align} b_n&={-}\frac{1}{n(n-3)}\left[ A\left( (2n-3)a_{n-3}+ \sum_{j=0}^{n-4}a_{n-4-j}\,({-}1)^{j} \left( {\frac{1}{(r_c^{+})^{j+1}}- \frac{2}{(2Q)^{j+1}}} \right) \right)\right.\nonumber\\ &\quad-k^{2}b_{n-2}+\frac{k^{2}M^{2}}{h^{4}}\,({b_{n-6}+4Qb_{n-5} +4Q^{2}b_{n-4}})\nonumber\\ &\quad+\sum_{j=0}^{n-1}({-}1)^{j}\,(n-1-j)\,b_{n-1-j} \left( {\frac{1}{(r_c^{+})^{j+1}}-\frac{2}{(2Q)^{j+1}}} \right)\nonumber\\ &\quad\left.{}-m^{2}\sum_{j=0}^{n-2}\frac{({-}1)^{j}}{(r_c^{+})^{j+2}}\,(j+1)\, b_{n-2-j} \right], \end{align}
\begin{align} b_n&={-}\frac{1}{n(n-3)}\left[ A\left( (2n-3)a_{n-3}+ \sum_{j=0}^{n-4}a_{n-4-j}\,({-}1)^{j} \left( {\frac{1}{(r_c^{+})^{j+1}}- \frac{2}{(2Q)^{j+1}}} \right) \right)\right.\nonumber\\ &\quad-k^{2}b_{n-2}+\frac{k^{2}M^{2}}{h^{4}}\,({b_{n-6}+4Qb_{n-5} +4Q^{2}b_{n-4}})\nonumber\\ &\quad+\sum_{j=0}^{n-1}({-}1)^{j}\,(n-1-j)\,b_{n-1-j} \left( {\frac{1}{(r_c^{+})^{j+1}}-\frac{2}{(2Q)^{j+1}}} \right)\nonumber\\ &\quad\left.{}-m^{2}\sum_{j=0}^{n-2}\frac{({-}1)^{j}}{(r_c^{+})^{j+2}}\,(j+1)\, b_{n-2-j} \right], \end{align}
where we take  $a_n=b_n=0$ for
$a_n=b_n=0$ for  $n<0$. Requiring
$n<0$. Requiring  $a_0 = b_0 = 1$, we then find that
$a_0 = b_0 = 1$, we then find that
 \begin{equation} b_1 = 0, \quad b_2 ={-}\frac{1}{2} \left( { k^{2}+\left({\frac{m}{r_c^{+}}}\right)}^{ 2} \right), \end{equation}
\begin{equation} b_1 = 0, \quad b_2 ={-}\frac{1}{2} \left( { k^{2}+\left({\frac{m}{r_c^{+}}}\right)}^{ 2} \right), \end{equation}
and that  $b_3$ is arbitrary, so we choose
$b_3$ is arbitrary, so we choose  $b_3=0$. However, for the recurrence relation involving
$b_3=0$. However, for the recurrence relation involving  $b_3$ on the left-hand side to hold, we also require that
$b_3$ on the left-hand side to hold, we also require that  $A$ is chosen to be
$A$ is chosen to be
 \begin{equation} A={-}\frac{1}{3}\left( {\frac{1}{Q}-\frac{1}{r_c^{+}}} \right) \left( { k^{2} + \left({\frac{m}{r_c^{+}}}\right)^{ 2}} \right) - \frac{2m^{2}}{3r_c^{{+}3}}. \end{equation}
\begin{equation} A={-}\frac{1}{3}\left( {\frac{1}{Q}-\frac{1}{r_c^{+}}} \right) \left( { k^{2} + \left({\frac{m}{r_c^{+}}}\right)^{ 2}} \right) - \frac{2m^{2}}{3r_c^{{+}3}}. \end{equation}
Here, the notation  $\tilde {p}_{c1}$ and
$\tilde {p}_{c1}$ and  $\tilde {p}_{c2}$ denotes that these are two linearly independent solutions for
$\tilde {p}_{c2}$ denotes that these are two linearly independent solutions for  $\tilde {p}$ about the critical point
$\tilde {p}$ about the critical point  $r_c^{+}$.
$r_c^{+}$.
The Frobenius series solutions (A6) are limited by a radius of convergence, in that the series converge if  $|r-r_c^{+}| < R$ for some radius of convergence
$|r-r_c^{+}| < R$ for some radius of convergence  $R$. Following from Fuchs’ theorem (Teschl Reference Teschl2012, Theorem 4.5), this
$R$. Following from Fuchs’ theorem (Teschl Reference Teschl2012, Theorem 4.5), this  $R$ is the distance between
$R$ is the distance between  $r_c^{+}$ and the next nearest singularity of the Pridmore-Brown equation, which is at either
$r_c^{+}$ and the next nearest singularity of the Pridmore-Brown equation, which is at either  $r=0$ or
$r=0$ or  $r = r_c^{-}$, and hence
$r = r_c^{-}$, and hence
 \begin{equation} R = \min\{|1-h+Q|, 2|Q|\}. \end{equation}
\begin{equation} R = \min\{|1-h+Q|, 2|Q|\}. \end{equation}
The choice of  $r_c^{+}$ as the singularity to expand around means that this expansion maximizes the region of
$r_c^{+}$ as the singularity to expand around means that this expansion maximizes the region of  $[1-h,1]$ contained within the radius of convergence. This is shown schematically in figure 13. It can be observed that these solutions are not always valid for all
$[1-h,1]$ contained within the radius of convergence. This is shown schematically in figure 13. It can be observed that these solutions are not always valid for all  $r\in [1-h,1]$. In particular, in the case
$r\in [1-h,1]$. In particular, in the case  $k\to {{\omega }/{M}}$, we observe
$k\to {{\omega }/{M}}$, we observe  $r_c^{\pm }\to (1-h)$ and the radius of convergence
$r_c^{\pm }\to (1-h)$ and the radius of convergence  $R \to 0$.
$R \to 0$.

Figure 13. Schematic of possible locations of the  $r_c^{\pm }$ critical points in the complex
$r_c^{\pm }$ critical points in the complex  $r$-plane. (a) The radius of convergence of the expansion about
$r$-plane. (a) The radius of convergence of the expansion about  $r_c^{+}$ covers the region of interest
$r_c^{+}$ covers the region of interest  $r\in [1-h,1]$. (b) The radius of convergence about
$r\in [1-h,1]$. (b) The radius of convergence about  $r_c^{+}$ is insufficient to cover
$r_c^{+}$ is insufficient to cover  $r\in [1-h,1]$.
$r\in [1-h,1]$.
A.2. Frobenius expansion $r=1$

In order to cover the remainder of the domain  $[1-h,1]$, we construct a second series solution about
$[1-h,1]$, we construct a second series solution about  $r=1$:
$r=1$:
 \begin{equation} \tilde{p}_{11}(r)=\sum_{n=0}^{\infty} \alpha_n (r-1)^{(n+1)}, \quad \tilde{p}_{12}(r)=\sum_{n=0}^{\infty} \beta_n (r-1)^{n}. \end{equation}
\begin{equation} \tilde{p}_{11}(r)=\sum_{n=0}^{\infty} \alpha_n (r-1)^{(n+1)}, \quad \tilde{p}_{12}(r)=\sum_{n=0}^{\infty} \beta_n (r-1)^{n}. \end{equation}
Specifying that  $\alpha _0 = \beta _0 = 1$, this results in the recurrence relations
$\alpha _0 = \beta _0 = 1$, this results in the recurrence relations
 \begin{align} \alpha_n&={-}\frac{1}{n(n+1)}\left[\vphantom{\sum_{j=0}^{n-2}}{-}k^{2}\alpha_{n-2}+ \frac{k^{2} M^{2}}{h^{4}}\,(\alpha_{n-6}+4h\alpha_{n-5}+ 2(3h^{2}-Q^{2})\alpha_{n-4}\right.\nonumber\\ & \quad +4h(h^{2}-Q^{2})\alpha_{n-3}+(h^{2}-Q^{2})^{2}\alpha_{n-2})\nonumber\\ &\quad +\sum_{j=0}^{n-1}({-}1)^{j}\,(n-j)\,\alpha_{n-j-1} \left( {1-\frac{2}{(h+Q)^{j+1}}-\frac{2}{(h-Q)^{j+1}}} \right)\nonumber\\ &\quad \left.{}-m^{2}\sum_{j=0}^{n-2}({-}1)^{j}\,(j+1)\,\alpha_{n-j-2}\right], \end{align}
\begin{align} \alpha_n&={-}\frac{1}{n(n+1)}\left[\vphantom{\sum_{j=0}^{n-2}}{-}k^{2}\alpha_{n-2}+ \frac{k^{2} M^{2}}{h^{4}}\,(\alpha_{n-6}+4h\alpha_{n-5}+ 2(3h^{2}-Q^{2})\alpha_{n-4}\right.\nonumber\\ & \quad +4h(h^{2}-Q^{2})\alpha_{n-3}+(h^{2}-Q^{2})^{2}\alpha_{n-2})\nonumber\\ &\quad +\sum_{j=0}^{n-1}({-}1)^{j}\,(n-j)\,\alpha_{n-j-1} \left( {1-\frac{2}{(h+Q)^{j+1}}-\frac{2}{(h-Q)^{j+1}}} \right)\nonumber\\ &\quad \left.{}-m^{2}\sum_{j=0}^{n-2}({-}1)^{j}\,(j+1)\,\alpha_{n-j-2}\right], \end{align} \begin{align} \beta_n&={-}\frac{1}{n(n-1)}\left[\vphantom{\sum_{j=0}^{n-2}}{-}k^{2}\beta_{n-2}+ \frac{k^{2} M^{2}}{h^{4}}\,(\beta_{n-6}+4h\beta_{n-5}+2(3h^{2}-Q^{2})\beta_{n-4}\right.\nonumber\\ &\quad +4h(h^{2}-Q^{2})\beta_{n-3}+(h^{2}-Q^{2})^{2}\beta_{n-2})\nonumber\\ &\quad +\sum_{j=0}^{n-1}({-}1)^{j}\,(n-j-1)\,\beta_{n-j-1} \left( {1-\frac{2}{(h+Q)^{j+1}}-\frac{2}{(h-Q)^{j+1}}} \right)\nonumber\\ &\quad \left.{}-m^{2}\sum_{j=0}^{n-2}({-}1)^{j}\,(j+1)\,\beta_{n-j-2}\right], \end{align}
\begin{align} \beta_n&={-}\frac{1}{n(n-1)}\left[\vphantom{\sum_{j=0}^{n-2}}{-}k^{2}\beta_{n-2}+ \frac{k^{2} M^{2}}{h^{4}}\,(\beta_{n-6}+4h\beta_{n-5}+2(3h^{2}-Q^{2})\beta_{n-4}\right.\nonumber\\ &\quad +4h(h^{2}-Q^{2})\beta_{n-3}+(h^{2}-Q^{2})^{2}\beta_{n-2})\nonumber\\ &\quad +\sum_{j=0}^{n-1}({-}1)^{j}\,(n-j-1)\,\beta_{n-j-1} \left( {1-\frac{2}{(h+Q)^{j+1}}-\frac{2}{(h-Q)^{j+1}}} \right)\nonumber\\ &\quad \left.{}-m^{2}\sum_{j=0}^{n-2}({-}1)^{j}\,(j+1)\,\beta_{n-j-2}\right], \end{align}
with  $\alpha _n=\beta _n=0$ for
$\alpha _n=\beta _n=0$ for  $n<0$. These solutions are labelled
$n<0$. These solutions are labelled  $\tilde {p}_{11}$ and
$\tilde {p}_{11}$ and  $\tilde {p}_{12}$ to indicate that they are two linearly independent solutions for
$\tilde {p}_{12}$ to indicate that they are two linearly independent solutions for  $\tilde {p}$ expanded about the point
$\tilde {p}$ expanded about the point  $r=1$.
$r=1$.
A.3. A homogeneous solution valid across $[1-h,1]$

We now construct solutions to the homogeneous Pridmore-Brown equation  $\tilde {p}_1(r)$ and
$\tilde {p}_1(r)$ and  $\tilde {p}_2(r)$ such that they are valid across the whole of
$\tilde {p}_2(r)$ such that they are valid across the whole of  $[1-h,1]$. We set
$[1-h,1]$. We set
 \begin{gather} \tilde{p}_1(r)=\begin{cases} \tilde{p}_{c1}(r), & |r - r_c^{+}| < R, \\ A_1\,\tilde{p}_{11}(r)+B_1\,\tilde{p}_{12}(r), & \text{otherwise}, \end{cases} \end{gather}
\begin{gather} \tilde{p}_1(r)=\begin{cases} \tilde{p}_{c1}(r), & |r - r_c^{+}| < R, \\ A_1\,\tilde{p}_{11}(r)+B_1\,\tilde{p}_{12}(r), & \text{otherwise}, \end{cases} \end{gather} \begin{gather}\tilde{p}_2(r)=\begin{cases} \tilde{p}_{c2}(r), & |r - r_c^{+}| < R, \\ A_2\,\tilde{p}_{11}(r)+B_2\,\tilde{p}_{12}(r), & \text{otherwise}. \end{cases} \end{gather}
\begin{gather}\tilde{p}_2(r)=\begin{cases} \tilde{p}_{c2}(r), & |r - r_c^{+}| < R, \\ A_2\,\tilde{p}_{11}(r)+B_2\,\tilde{p}_{12}(r), & \text{otherwise}. \end{cases} \end{gather}
First, note that these expansions are sufficient for a uniformly valid expansion, as sketched in figure 14. Note also from figure 14 that the regions of convergence of the  $\tilde {p}_{c}$ solutions and the
$\tilde {p}_{c}$ solutions and the  $\tilde {p}_{1}$ solutions always overlap (except when
$\tilde {p}_{1}$ solutions always overlap (except when  $k={{\omega }/{M}}$, which we exclude here). For any real
$k={{\omega }/{M}}$, which we exclude here). For any real  ${\bar r} > \textrm {Re}(r_c^{+})$ contained within both regions of convergence, we may find the coefficients
${\bar r} > \textrm {Re}(r_c^{+})$ contained within both regions of convergence, we may find the coefficients  $A_1$,
$A_1$,  $A_2$,
$A_2$,  $B_1$ and
$B_1$ and  $B_2$ by requiring continuity and continuous derivatives at
$B_2$ by requiring continuity and continuous derivatives at  $r = {\bar r}$:
$r = {\bar r}$:
 \begin{equation} \left[\begin{array}{cc} A_1 & A_2 \\ B_1 & B_2 \end{array}\right]=\left[\begin{array}{cc} \tilde{p}_{11}({\bar r}) & \tilde{p}_{12}({\bar r}) \\ \tilde{p}_{11}^{\prime}({\bar r}) & \tilde{p}_{12}^{\prime}({\bar r}) \end{array}\right]^{{-}1}\left[\begin{array}{cc} \tilde{p}_{c1}({\bar r}) & \tilde{p}_{c2}({\bar r}) \\ \tilde{p}_{c1}^{\prime}({\bar r}) & \tilde{p}_{c2}^{\prime}({\bar r}) \end{array}\right]. \end{equation}
\begin{equation} \left[\begin{array}{cc} A_1 & A_2 \\ B_1 & B_2 \end{array}\right]=\left[\begin{array}{cc} \tilde{p}_{11}({\bar r}) & \tilde{p}_{12}({\bar r}) \\ \tilde{p}_{11}^{\prime}({\bar r}) & \tilde{p}_{12}^{\prime}({\bar r}) \end{array}\right]^{{-}1}\left[\begin{array}{cc} \tilde{p}_{c1}({\bar r}) & \tilde{p}_{c2}({\bar r}) \\ \tilde{p}_{c1}^{\prime}({\bar r}) & \tilde{p}_{c2}^{\prime}({\bar r}) \end{array}\right]. \end{equation}
These coefficients  $A_1$,
$A_1$,  $B_1$,
$B_1$,  $A_2$ and
$A_2$ and  $B_2$ are independent of the specific choice of
$B_2$ are independent of the specific choice of  ${\bar r}$, and the resulting solutions
${\bar r}$, and the resulting solutions  $\tilde {p}_1$ and
$\tilde {p}_1$ and  $\tilde {p}_2$ have not only
$\tilde {p}_2$ have not only  $C^{1}$ continuity but
$C^{1}$ continuity but  $C^{\infty }$, since both are solutions of the Pridmore-Brown equation. In effect,
$C^{\infty }$, since both are solutions of the Pridmore-Brown equation. In effect,  $\tilde {p}_1$ analytically continues
$\tilde {p}_1$ analytically continues  $\tilde {p}_{c1}$ beyond its radius of convergence, and similarly
$\tilde {p}_{c1}$ beyond its radius of convergence, and similarly  $\tilde {p}_2$ analytically continues
$\tilde {p}_2$ analytically continues  $\tilde {p}_{c2}$.
$\tilde {p}_{c2}$.

Figure 14. As for figure 13(b) with the radii of convergence for  $\tilde {p}_{11}$ and
$\tilde {p}_{11}$ and  $\tilde {p}_{12}$ added.
$\tilde {p}_{12}$ added.
As described in (2.17), there is a jump in  $\tilde {p}_{c2}$ across the critical layer branch cut due to the
$\tilde {p}_{c2}$ across the critical layer branch cut due to the  $\log$ term in (A6b). If the radius of convergence
$\log$ term in (A6b). If the radius of convergence  $R$ is sufficiently large that
$R$ is sufficiently large that  $r=1$ is within the radius of convergence, then no matching coefficients are needed, and this jump in
$r=1$ is within the radius of convergence, then no matching coefficients are needed, and this jump in  $\tilde {p}_{c2}$ obviously carries through to
$\tilde {p}_{c2}$ obviously carries through to  $\tilde {p}_2$. In the other case, that
$\tilde {p}_2$. In the other case, that  $R$ is sufficiently small that matching is needed, it follows that
$R$ is sufficiently small that matching is needed, it follows that  ${\bar r} < 1$. In this case, there is no jump in the matching coefficients
${\bar r} < 1$. In this case, there is no jump in the matching coefficients  $A_1$,
$A_1$,  $A_2$,
$A_2$,  $B_1$ and
$B_1$ and  $B_2$ as
$B_2$ as  ${\bar r} > \textrm {Re}(r_c^{+})$, and hence
${\bar r} > \textrm {Re}(r_c^{+})$, and hence
 \begin{equation} {\rm \Delta} \tilde{p}_2(r)={-}2{\rm \pi}\mathrm{i} A\,\tilde{p}_1(r)\,H(r_c^{+}-r). \end{equation}
\begin{equation} {\rm \Delta} \tilde{p}_2(r)={-}2{\rm \pi}\mathrm{i} A\,\tilde{p}_1(r)\,H(r_c^{+}-r). \end{equation}
This is analogous to the jump in  $\tilde {p}_2$ given in (2.17), and shows that the jump in
$\tilde {p}_2$ given in (2.17), and shows that the jump in  $\tilde {p}_{c2}$ carries through the analytic continuation, as might have been expected a priori.
$\tilde {p}_{c2}$ carries through the analytic continuation, as might have been expected a priori.
A.4. The Wronskian of $\tilde {p}_1$ and $\tilde {p}_2$


We define the Wronskian of  $\tilde {p}_1$ and
$\tilde {p}_1$ and  $\tilde {p}_2$ to be
$\tilde {p}_2$ to be
 \begin{equation} W(r) = \mathcal{W}(\tilde{p}_1,\tilde{p}_2;r)=\tilde{p}_1(r)\,\tilde{p}_2^{\prime}(r)- \tilde{p}_{2}(r)\,\tilde{p}_1^{\prime}(r). \end{equation}
\begin{equation} W(r) = \mathcal{W}(\tilde{p}_1,\tilde{p}_2;r)=\tilde{p}_1(r)\,\tilde{p}_2^{\prime}(r)- \tilde{p}_{2}(r)\,\tilde{p}_1^{\prime}(r). \end{equation}
Since  $\tilde {p}_1$ and
$\tilde {p}_1$ and  $\tilde {p}_2$ are solutions of the homogeneous Pridmore-Brown equation (A1), we have that
$\tilde {p}_2$ are solutions of the homogeneous Pridmore-Brown equation (A1), we have that
 \begin{equation} W'+ \left( {\frac{2k U^{\prime}}{\omega-Uk}+\frac{1}{r}} \right) W=0\quad \Rightarrow\quad W(r)\propto \frac{(r-r_c^{+})^{2}(r-r_c^{-})^{2}}{r}. \end{equation}
\begin{equation} W'+ \left( {\frac{2k U^{\prime}}{\omega-Uk}+\frac{1}{r}} \right) W=0\quad \Rightarrow\quad W(r)\propto \frac{(r-r_c^{+})^{2}(r-r_c^{-})^{2}}{r}. \end{equation}
By considering the behaviour of  $\tilde {p}_1$ and
$\tilde {p}_1$ and  $\tilde {p}_2$ as
$\tilde {p}_2$ as  $r\to r_c^{+}$, we find that
$r\to r_c^{+}$, we find that  $W(r) = -3(r-r_c^{+})^{2} + O((r-r_c^{+})^{4})$, so the constant of proportionality can be found, giving
$W(r) = -3(r-r_c^{+})^{2} + O((r-r_c^{+})^{4})$, so the constant of proportionality can be found, giving
 \begin{equation} W(r)={-}\frac{3}{4}\,\frac{r_c^{+}(r-r_c^{+})^{2}(r-r_c^{-})^{2}}{rQ^{2}}. \end{equation}
\begin{equation} W(r)={-}\frac{3}{4}\,\frac{r_c^{+}(r-r_c^{+})^{2}(r-r_c^{-})^{2}}{rQ^{2}}. \end{equation}Appendix B. The jump in $\tilde {G}$ across the critical layer branch cut

In this appendix, we split the jump in  $\tilde {G}$ across the critical layer branch cut,
$\tilde {G}$ across the critical layer branch cut,  ${\rm \Delta} \tilde {G}$, into its various components about the three possible branch points
${\rm \Delta} \tilde {G}$, into its various components about the three possible branch points  ${{\omega }/{M}}$,
${{\omega }/{M}}$,  $k_0$ and
$k_0$ and  $k_r$. For this reason, we restrict attention to
$k_r$. For this reason, we restrict attention to  $k \in [{{\omega }/{M}},\infty )$, that is, to
$k \in [{{\omega }/{M}},\infty )$, that is, to  $k$ on the critical layer branch cut. In this case,
$k$ on the critical layer branch cut. In this case,  $r_c^{+}(k)\in [1 - h,1)$, and
$r_c^{+}(k)\in [1 - h,1)$, and  $r_c^{+}(k)$ is an increasing function of
$r_c^{+}(k)$ is an increasing function of  $k$. Recall from (3.5) that
$k$. Recall from (3.5) that
 \begin{align} {\rm \Delta} \tilde{G}&={-}\frac{\omega-U(r^{*})\,k}{2\mathrm{i}{\rm \pi} r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}\nonumber\\ &\quad\times \left[\frac{2\mathrm{i}{\rm \pi} A D_1\hat{D}_2\,\psi^{-}_1(\check{r})\, \psi^{-}_2(\hat{r})}{C_1^{-}\hat{D}_2-\hat{C}_2D_1}-\psi^{-}_1(\check{r})\,{\rm \Delta} \psi_2(\hat{r})-{\rm \Delta} \psi_1(\check{r})\,\psi^{-}_2(\hat{r})-{\rm \Delta} \psi_1(\check{r})\,{\rm \Delta} \psi_2(\hat{r})\right], \end{align}
\begin{align} {\rm \Delta} \tilde{G}&={-}\frac{\omega-U(r^{*})\,k}{2\mathrm{i}{\rm \pi} r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}\nonumber\\ &\quad\times \left[\frac{2\mathrm{i}{\rm \pi} A D_1\hat{D}_2\,\psi^{-}_1(\check{r})\, \psi^{-}_2(\hat{r})}{C_1^{-}\hat{D}_2-\hat{C}_2D_1}-\psi^{-}_1(\check{r})\,{\rm \Delta} \psi_2(\hat{r})-{\rm \Delta} \psi_1(\check{r})\,\psi^{-}_2(\hat{r})-{\rm \Delta} \psi_1(\check{r})\,{\rm \Delta} \psi_2(\hat{r})\right], \end{align}
with  ${\rm \Delta} \psi _1$ and
${\rm \Delta} \psi _1$ and  ${\rm \Delta} \psi _2$ given in (2.25) as
${\rm \Delta} \psi _2$ given in (2.25) as
 \begin{gather} {\rm \Delta} \psi_1(r)=\begin{cases} 0, & r < r_c^{+},\\ 2\mathrm{i}{\rm \pi} AD_1\tilde{p}_1, & r \geq r_c^{+}, \end{cases} \end{gather}
\begin{gather} {\rm \Delta} \psi_1(r)=\begin{cases} 0, & r < r_c^{+},\\ 2\mathrm{i}{\rm \pi} AD_1\tilde{p}_1, & r \geq r_c^{+}, \end{cases} \end{gather} \begin{gather}{\rm \Delta} \psi_2(r)=\begin{cases} {\rm \Delta} \check{C}_2\,H_m^{(1)}(\alpha r)+{\rm \Delta} \check{D}_2\,H_m^{(2)}(\alpha r), & 0\leq r\leq 1-h, \\ -2\mathrm{i}{\rm \pi} A\,\tilde{p}_1(r)\,\hat{D}_2, & 1-h\leq r \leq r_c^{+},\\ 0 & r_c^{+}< r, \leq 1. \end{cases} \end{gather}
\begin{gather}{\rm \Delta} \psi_2(r)=\begin{cases} {\rm \Delta} \check{C}_2\,H_m^{(1)}(\alpha r)+{\rm \Delta} \check{D}_2\,H_m^{(2)}(\alpha r), & 0\leq r\leq 1-h, \\ -2\mathrm{i}{\rm \pi} A\,\tilde{p}_1(r)\,\hat{D}_2, & 1-h\leq r \leq r_c^{+},\\ 0 & r_c^{+}< r, \leq 1. \end{cases} \end{gather}
Note that since  $\check {r}<\hat {r}$, it must be that
$\check {r}<\hat {r}$, it must be that  ${\rm \Delta} \psi _1(\check {r})\,{\rm \Delta} \psi _2(\hat {r})=0$ in all cases.
${\rm \Delta} \psi _1(\check {r})\,{\rm \Delta} \psi _2(\hat {r})=0$ in all cases.
When  $r,r_0<1-h$, for any
$r,r_0<1-h$, for any  $k$ on the branch cut we have that
$k$ on the branch cut we have that  ${\rm \Delta} \psi _1 =0$ and
${\rm \Delta} \psi _1 =0$ and  ${\rm \Delta} \psi _2 \neq 0$. This means that we have the same formula for
${\rm \Delta} \psi _2 \neq 0$. This means that we have the same formula for  ${\rm \Delta} \tilde {G}$ for any
${\rm \Delta} \tilde {G}$ for any  $k$ on the branch cut in this case, so that
$k$ on the branch cut in this case, so that  ${{\omega }/{M}}$ is the only branch point of
${{\omega }/{M}}$ is the only branch point of  ${\rm \Delta} \tilde {G}$. Hence we write
${\rm \Delta} \tilde {G}$. Hence we write  ${\rm \Delta} \tilde {G} = {\rm \Delta} \tilde {G}_{{{\omega }/{M}}}$, where
${\rm \Delta} \tilde {G} = {\rm \Delta} \tilde {G}_{{{\omega }/{M}}}$, where
 \begin{align} {\rm \Delta} \tilde{G}_{{{\omega}/{M}}}&={-}\frac{\omega-U(r^{*})\,k}{2\mathrm{i}{\rm \pi} r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2} \nonumber\\ &\quad\times \left[\frac{2\mathrm{i}{\rm \pi} A D_1\hat{D}_2\,\psi^{-}_1(\check{r})\, \psi^{-}_2(\hat{r})}{C_1^{-}\hat{D}_2-\hat{C}_2D_1}-\psi^{-}_1(\check{r})\,{\rm \Delta} \psi_2(\hat{r})\right], \nonumber\\ &={-}\frac{\omega-U(r^{*})\,k}{r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}\, \frac{ A\hat{D}_2^{2}\,\psi^{-}_1(\check{r})\,\psi^{-}_1(\hat{r})}{C_1^{-}\hat{D}_2-\hat{C}_2D_1}. \end{align}
\begin{align} {\rm \Delta} \tilde{G}_{{{\omega}/{M}}}&={-}\frac{\omega-U(r^{*})\,k}{2\mathrm{i}{\rm \pi} r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2} \nonumber\\ &\quad\times \left[\frac{2\mathrm{i}{\rm \pi} A D_1\hat{D}_2\,\psi^{-}_1(\check{r})\, \psi^{-}_2(\hat{r})}{C_1^{-}\hat{D}_2-\hat{C}_2D_1}-\psi^{-}_1(\check{r})\,{\rm \Delta} \psi_2(\hat{r})\right], \nonumber\\ &={-}\frac{\omega-U(r^{*})\,k}{r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}\, \frac{ A\hat{D}_2^{2}\,\psi^{-}_1(\check{r})\,\psi^{-}_1(\hat{r})}{C_1^{-}\hat{D}_2-\hat{C}_2D_1}. \end{align}
When  $\check {r}<1-h<\hat {r}$, the formula for
$\check {r}<1-h<\hat {r}$, the formula for  ${\rm \Delta} \tilde {G}$ depends on whether
${\rm \Delta} \tilde {G}$ depends on whether  ${{\omega }/{M}}< k< k_>$ or
${{\omega }/{M}}< k< k_>$ or  $k>k_>$. In this case, we set
$k>k_>$. In this case, we set  ${\rm \Delta} \tilde {G} = {\rm \Delta} \tilde {G}_{{{\omega }/{M}}}$ for
${\rm \Delta} \tilde {G} = {\rm \Delta} \tilde {G}_{{{\omega }/{M}}}$ for  ${{\omega }/{M}}_k< k_>$, and
${{\omega }/{M}}_k< k_>$, and  ${\rm \Delta} \tilde {G} = {\rm \Delta} \tilde {G}_{{{\omega }/{M}}} + {\rm \Delta} \tilde {G}_>$ for
${\rm \Delta} \tilde {G} = {\rm \Delta} \tilde {G}_{{{\omega }/{M}}} + {\rm \Delta} \tilde {G}_>$ for  $k>k_>$, so that
$k>k_>$, so that  ${\rm \Delta} \tilde {G}_>$ is the correction required for
${\rm \Delta} \tilde {G}_>$ is the correction required for  $k>k_>$. In effect,
$k>k_>$. In effect,  ${\rm \Delta} \tilde {G}$ has two branch points, one at
${\rm \Delta} \tilde {G}$ has two branch points, one at  ${{\omega }/{M}}$ and one at
${{\omega }/{M}}$ and one at  $k_>$ in this case, and by making this definition, we may write
$k_>$ in this case, and by making this definition, we may write
 \begin{equation} \int_{{{\omega}/{M}}}^{\infty}{\rm \Delta} \tilde{G}\,\mathrm{e}^{-\mathrm{i} kx}\,\mathrm{d} k = \int_{{{\omega}/{M}}}^{\infty}{\rm \Delta} \tilde{G}_{{{\omega}/{M}}}\,\mathrm{e}^{-\mathrm{i} kx}\,\mathrm{d} k + \int_{k_>}^{\infty}{\rm \Delta} \tilde{G}_>\,\mathrm{e}^{-\mathrm{i} kx}\,\mathrm{d} k. \end{equation}
\begin{equation} \int_{{{\omega}/{M}}}^{\infty}{\rm \Delta} \tilde{G}\,\mathrm{e}^{-\mathrm{i} kx}\,\mathrm{d} k = \int_{{{\omega}/{M}}}^{\infty}{\rm \Delta} \tilde{G}_{{{\omega}/{M}}}\,\mathrm{e}^{-\mathrm{i} kx}\,\mathrm{d} k + \int_{k_>}^{\infty}{\rm \Delta} \tilde{G}_>\,\mathrm{e}^{-\mathrm{i} kx}\,\mathrm{d} k. \end{equation}By considering (B1) in this case, we find that
 \begin{align} {\rm \Delta} \tilde{G}_{{{\omega}/{M}}} &={-}\frac{\omega-U(r^{*})\,k}{r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}\, \frac{A D_1\hat{D}_2\,\psi^{-}_1(\check{r})\,\psi^{-}_2(\hat{r})}{C_1^{-}\hat{D}_2-\hat{C}_2D_1}, \end{align}
\begin{align} {\rm \Delta} \tilde{G}_{{{\omega}/{M}}} &={-}\frac{\omega-U(r^{*})\,k}{r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}\, \frac{A D_1\hat{D}_2\,\psi^{-}_1(\check{r})\,\psi^{-}_2(\hat{r})}{C_1^{-}\hat{D}_2-\hat{C}_2D_1}, \end{align} \begin{align} {\rm \Delta} \tilde{G}_{>}&= \frac{\omega-U(r^{*})\,k}{2\mathrm{i}{\rm \pi} r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}\,\psi^{-}_1(\check{r})\,{\rm \Delta} \psi_2(\hat{r}) \nonumber\\ &={-}\frac{\omega-U(r^{*})\,k}{r^{*}\,W(r^{*})}\, \frac{A \hat{D}_2\,\psi^{-}_1(\check{r})\,\tilde{p}_1(\hat{r})}{C^{-}_1\hat{D}_2-\hat{C}_2D_1 +2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}. \end{align}
\begin{align} {\rm \Delta} \tilde{G}_{>}&= \frac{\omega-U(r^{*})\,k}{2\mathrm{i}{\rm \pi} r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}\,\psi^{-}_1(\check{r})\,{\rm \Delta} \psi_2(\hat{r}) \nonumber\\ &={-}\frac{\omega-U(r^{*})\,k}{r^{*}\,W(r^{*})}\, \frac{A \hat{D}_2\,\psi^{-}_1(\check{r})\,\tilde{p}_1(\hat{r})}{C^{-}_1\hat{D}_2-\hat{C}_2D_1 +2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}. \end{align}
Finally, when we have  $1-h<\check {r}$, we must consider three cases:
$1-h<\check {r}$, we must consider three cases:  ${{\omega }/{M}}< k< k_<$,
${{\omega }/{M}}< k< k_<$,  $k_<< k< k_>$ and
$k_<< k< k_>$ and  $k_>< k$. Similarly to the previous case, we consider
$k_>< k$. Similarly to the previous case, we consider  ${\rm \Delta} \tilde {G}_{{{\omega }/{M}}}={\rm \Delta} \tilde {G}$ for
${\rm \Delta} \tilde {G}_{{{\omega }/{M}}}={\rm \Delta} \tilde {G}$ for  ${{\omega }/{M}}< k< k_<$, and take
${{\omega }/{M}}< k< k_<$, and take  ${\rm \Delta} \tilde {G}_{<}$ and
${\rm \Delta} \tilde {G}_{<}$ and  ${\rm \Delta} \tilde {G}_{>}$ to be correction terms as
${\rm \Delta} \tilde {G}_{>}$ to be correction terms as  $k$ crosses
$k$ crosses  $k_<$ and
$k_<$ and  $k_>$, respectively. This leads to
$k_>$, respectively. This leads to
 \begin{align} {\rm \Delta} \tilde{G}_{{{\omega}/{M}}}&={-}\frac{\omega-U(r^{*})\,k}{2\mathrm{i}{\rm \pi} r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2} \nonumber\\ &\quad\times \left[\frac{2\mathrm{i}{\rm \pi} A D_1\hat{D}_2\,\psi^{-}_1(\check{r})\, \psi^{-}_2(\hat{r})}{C_1^{-}\hat{D}_2-\hat{C}_2D_1}-{\rm \Delta} \psi^{-}_1(\check{r})\, \psi_2(\hat{r})\right] \nonumber\\ &={-}\frac{\omega-U(r^{*})\,k}{r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}\, \frac{ AD_1^{2}\,\psi^{-}_2(\check{r})\,\psi^{-}_2(\hat{r})}{C_1^{-}\hat{D}_2-\hat{C}_2D_1}, \end{align}
\begin{align} {\rm \Delta} \tilde{G}_{{{\omega}/{M}}}&={-}\frac{\omega-U(r^{*})\,k}{2\mathrm{i}{\rm \pi} r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2} \nonumber\\ &\quad\times \left[\frac{2\mathrm{i}{\rm \pi} A D_1\hat{D}_2\,\psi^{-}_1(\check{r})\, \psi^{-}_2(\hat{r})}{C_1^{-}\hat{D}_2-\hat{C}_2D_1}-{\rm \Delta} \psi^{-}_1(\check{r})\, \psi_2(\hat{r})\right] \nonumber\\ &={-}\frac{\omega-U(r^{*})\,k}{r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}\, \frac{ AD_1^{2}\,\psi^{-}_2(\check{r})\,\psi^{-}_2(\hat{r})}{C_1^{-}\hat{D}_2-\hat{C}_2D_1}, \end{align} \begin{align} {\rm \Delta} \tilde{G}_{<}&={-}\frac{\omega-U(r^{*})\,k}{2\mathrm{i}{\rm \pi} r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}\,{\rm \Delta} \psi^{-}_1(\check{r})\,\psi_2(\hat{r}) \nonumber\\ &={-}\frac{\omega-U(r^{*})\,k}{r^{*}\,W(r^{*})}\, \frac{A D_1\,\tilde{p}_1(\hat{r})\,\psi^{-}_2(\hat{r})}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+ 2\mathrm{i}{\rm \pi} AD_1\hat{D}_2} , \end{align}
\begin{align} {\rm \Delta} \tilde{G}_{<}&={-}\frac{\omega-U(r^{*})\,k}{2\mathrm{i}{\rm \pi} r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}\,{\rm \Delta} \psi^{-}_1(\check{r})\,\psi_2(\hat{r}) \nonumber\\ &={-}\frac{\omega-U(r^{*})\,k}{r^{*}\,W(r^{*})}\, \frac{A D_1\,\tilde{p}_1(\hat{r})\,\psi^{-}_2(\hat{r})}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+ 2\mathrm{i}{\rm \pi} AD_1\hat{D}_2} , \end{align} \begin{align} {\rm \Delta} \tilde{G}_{>}&= \frac{\omega-U(r^{*})\,k}{2\mathrm{i}{\rm \pi} r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}\,\psi^{-}_1(\check{r})\,{\rm \Delta} \psi_2(\hat{r}) \nonumber\\ &={-}\frac{\omega-U(r^{*})\,k}{r^{*}\,W(r^{*})}\, \frac{A \hat{D}_2\,\psi^{-}_1(\check{r})\,\tilde{p}_1(\hat{r})}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2 \mathrm{i}{\rm \pi} AD_1\hat{D}_2}. \end{align}
\begin{align} {\rm \Delta} \tilde{G}_{>}&= \frac{\omega-U(r^{*})\,k}{2\mathrm{i}{\rm \pi} r^{*}\,W(r^{*})}\, \frac{1}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}\,\psi^{-}_1(\check{r})\,{\rm \Delta} \psi_2(\hat{r}) \nonumber\\ &={-}\frac{\omega-U(r^{*})\,k}{r^{*}\,W(r^{*})}\, \frac{A \hat{D}_2\,\psi^{-}_1(\check{r})\,\tilde{p}_1(\hat{r})}{C^{-}_1\hat{D}_2-\hat{C}_2D_1+2 \mathrm{i}{\rm \pi} AD_1\hat{D}_2}. \end{align}Appendix C. Asymptotic behaviours of $\tilde {G}$ and ${\rm \Delta} \tilde {G}_{q}$


In order to find the residue contribution of the non-modal pole at  $k = k_0$, and the decay rates of the steepest descent contours given by integrating
$k = k_0$, and the decay rates of the steepest descent contours given by integrating  ${\rm \Delta} \tilde {G}_q$ along
${\rm \Delta} \tilde {G}_q$ along  $k = k_q - \mathrm {i}\xi$, we are required to understand the behaviour of
$k = k_q - \mathrm {i}\xi$, we are required to understand the behaviour of  $\tilde {p}_1$ and
$\tilde {p}_1$ and  $\tilde {p}_2$ at
$\tilde {p}_2$ at  $r = 1-h$,
$r = 1-h$,  $r$,
$r$,  $r_0$ and
$r_0$ and  $1$ as
$1$ as  $k \to {{\omega }/{M}},k_r,k_0$, where
$k \to {{\omega }/{M}},k_r,k_0$, where  $\tilde {p}_1$ and
$\tilde {p}_1$ and  $\tilde {p}_2$ are given in § A.3.
$\tilde {p}_2$ are given in § A.3.
Considering the evaluations at  $r$,
$r$,  $r_0>1-h$ and
$r_0>1-h$ and  $1$, it can be noted that we must examine the cases that
$1$, it can be noted that we must examine the cases that  $\tilde {p}_1$ and
$\tilde {p}_1$ and  $\tilde {p}_2$ are described as
$\tilde {p}_2$ are described as  $\tilde {p}_{c1}$ and
$\tilde {p}_{c1}$ and  $\tilde {p}_{c2}$, respectively (as described in § A.1), or, if we have been required to perform matching, that both are expressed in terms of
$\tilde {p}_{c2}$, respectively (as described in § A.1), or, if we have been required to perform matching, that both are expressed in terms of  $\tilde {p}_{11}$ and
$\tilde {p}_{11}$ and  $\tilde {p}_{12}$ (given in § A.2). If we examine the limit
$\tilde {p}_{12}$ (given in § A.2). If we examine the limit  $k\to {{\omega }/{M}}$, then it will follow that in each case we are required to take the matched solutions
$k\to {{\omega }/{M}}$, then it will follow that in each case we are required to take the matched solutions  $\tilde {p}_{11}$ and
$\tilde {p}_{11}$ and  $\tilde {p}_{12}$.
$\tilde {p}_{12}$.
C.1. Asymptotic behaviour as $k \to \omega /M$

Consider first  $\tilde {p}_{c1}$ and
$\tilde {p}_{c1}$ and  $\tilde {p}_{c2}$ for
$\tilde {p}_{c2}$ for  $k$ close to
$k$ close to  ${{\omega }/{M}}$ and
${{\omega }/{M}}$ and  $r$ close to
$r$ close to  $1 - h$. Since
$1 - h$. Since  $Q=h\sqrt {1-\omega /(Mk)} = O((k-{{\omega }/{M}})^{{1}/{2}})$, we consider the limit
$Q=h\sqrt {1-\omega /(Mk)} = O((k-{{\omega }/{M}})^{{1}/{2}})$, we consider the limit  $|Q|\to 0$ and set
$|Q|\to 0$ and set  $r=1-h+RQ$ for
$r=1-h+RQ$ for  $|R|\leq O(1)$. By considering the recurrence formulae for the Frobenius expansion coefficients
$|R|\leq O(1)$. By considering the recurrence formulae for the Frobenius expansion coefficients  $a_n$ and
$a_n$ and  $b_n$ given in (A6c) and (A6d) in this limit, and after some algebra, it can be found to leading order that
$b_n$ given in (A6c) and (A6d) in this limit, and after some algebra, it can be found to leading order that
 \begin{gather} \tilde{p}_{c1}(1 - h+RQ)=Q^{3}(R-1)^{3}\left( {1+\frac{3}{4}\,(R-1)+ \frac{3}{20}\,(R-1)^{2}} \right)+O(Q^{4}), \end{gather}
\begin{gather} \tilde{p}_{c1}(1 - h+RQ)=Q^{3}(R-1)^{3}\left( {1+\frac{3}{4}\,(R-1)+ \frac{3}{20}\,(R-1)^{2}} \right)+O(Q^{4}), \end{gather} \begin{gather}\tilde{p}_{c2}(1 - h+RQ)=1+O(Q^{2}\log(Q)), \end{gather}
\begin{gather}\tilde{p}_{c2}(1 - h+RQ)=1+O(Q^{2}\log(Q)), \end{gather} \begin{gather}\tilde{p}_{c1}^{\prime}(1 - h+RQ)=3Q^{2}(R-1)^{2}\left( {1+(R-1)+ \frac{1}{4}\,(R-1)^{2}} \right)+O(Q^{3}), \end{gather}
\begin{gather}\tilde{p}_{c1}^{\prime}(1 - h+RQ)=3Q^{2}(R-1)^{2}\left( {1+(R-1)+ \frac{1}{4}\,(R-1)^{2}} \right)+O(Q^{3}), \end{gather} \begin{gather}\tilde{p}_{c2}^{\prime}(1 - h+RQ)={-}Q\log(Q) \left(\frac{\omega^{2}}{M^{2}} + \frac{m^{2}}{(1 - h)^{2}}\right) (R - 1)^{2}\nonumber\\ \qquad\qquad\qquad\qquad\qquad\times \left( { 1+(R - 1)+\frac{(R - 1)^{2}}{4}} \right) +O(Q). \end{gather}
\begin{gather}\tilde{p}_{c2}^{\prime}(1 - h+RQ)={-}Q\log(Q) \left(\frac{\omega^{2}}{M^{2}} + \frac{m^{2}}{(1 - h)^{2}}\right) (R - 1)^{2}\nonumber\\ \qquad\qquad\qquad\qquad\qquad\times \left( { 1+(R - 1)+\frac{(R - 1)^{2}}{4}} \right) +O(Q). \end{gather}
We consider next  $\tilde {p}_{11}$ and
$\tilde {p}_{11}$ and  $\tilde {p}_{12}$ in the same limit. By considering the recurrence formulae for the series coefficients
$\tilde {p}_{12}$ in the same limit. By considering the recurrence formulae for the series coefficients  $\alpha _n$ and
$\alpha _n$ and  $\beta _n$ given in (A11a) and (A11b), it can be found that there are coefficients
$\beta _n$ given in (A11a) and (A11b), it can be found that there are coefficients  $\tilde {p}_{11}^{(n)}$,
$\tilde {p}_{11}^{(n)}$,  $\tilde {p}_{11}^{\prime (n)}$,
$\tilde {p}_{11}^{\prime (n)}$,  $\tilde {p}_{12}^{(n)}$and
$\tilde {p}_{12}^{(n)}$and  $\tilde {p}_{12}^{\prime (n)}$ that are
$\tilde {p}_{12}^{\prime (n)}$ that are  $O(1)$ as
$O(1)$ as  $|Q|\to 0$ such that
$|Q|\to 0$ such that
 \begin{gather} \tilde{p}_{11}(1-h+RQ)=\sum_{n=0}^{\infty} (RQ)^{n} \tilde{p}_{11}^{(n)}, \quad \tilde{p}_{12}(1-h+RQ)=\sum_{n=0}^{\infty} (RQ)^{n} \tilde{p}_{12}^{(n)}, \end{gather}
\begin{gather} \tilde{p}_{11}(1-h+RQ)=\sum_{n=0}^{\infty} (RQ)^{n} \tilde{p}_{11}^{(n)}, \quad \tilde{p}_{12}(1-h+RQ)=\sum_{n=0}^{\infty} (RQ)^{n} \tilde{p}_{12}^{(n)}, \end{gather} \begin{gather}\tilde{p}_{11}^{\prime}(1-h+RQ)=\sum_{n=0}^{\infty} (RQ)^{n} \tilde{p}_{11}^{\prime(n)}, \quad \tilde{p}_{12}^{\prime}(1-h+RQ)= \sum_{n=0}^{\infty} (RQ)^{n} \tilde{p}_{12}^{\prime(n)}. \end{gather}
\begin{gather}\tilde{p}_{11}^{\prime}(1-h+RQ)=\sum_{n=0}^{\infty} (RQ)^{n} \tilde{p}_{11}^{\prime(n)}, \quad \tilde{p}_{12}^{\prime}(1-h+RQ)= \sum_{n=0}^{\infty} (RQ)^{n} \tilde{p}_{12}^{\prime(n)}. \end{gather}
Note in particular that as  $|Q|\to 0$, the coefficients of the
$|Q|\to 0$, the coefficients of the  $R^{5}$ term in both
$R^{5}$ term in both  $\tilde {p}_{11}$ and
$\tilde {p}_{11}$ and  $\tilde {p}_{12}$ tend to zero at least as fast as
$\tilde {p}_{12}$ tend to zero at least as fast as  $Q^{5}$, whereas in
$Q^{5}$, whereas in  $\tilde {p}_{c1}$ from (C1a) the coefficient of
$\tilde {p}_{c1}$ from (C1a) the coefficient of  $R^{5}$ tends to zero as
$R^{5}$ tends to zero as  $Q^{3}$. Hence if we were to write
$Q^{3}$. Hence if we were to write  $\tilde {p}_{c1} = A_1\tilde {p}_{11} + B_1\tilde {p}_{12}$, then at least one of the coefficients
$\tilde {p}_{c1} = A_1\tilde {p}_{11} + B_1\tilde {p}_{12}$, then at least one of the coefficients  $A_1$ and
$A_1$ and  $B_1$ would need to tend to infinity as
$B_1$ would need to tend to infinity as  $Q^{-2}$ or faster as
$Q^{-2}$ or faster as  $|Q|\to 0$. We argue that the choice of
$|Q|\to 0$. We argue that the choice of  $\tilde {p}_{11}$ and
$\tilde {p}_{11}$ and  $\tilde {p}_{12}$ as two linearly independent solutions about
$\tilde {p}_{12}$ as two linearly independent solutions about  $r=1$ is arbitrary, and so by symmetry between
$r=1$ is arbitrary, and so by symmetry between  $\tilde {p}_{11}$ and
$\tilde {p}_{11}$ and  $\tilde {p}_{12}$ we expect
$\tilde {p}_{12}$ we expect  $A_1$ and
$A_1$ and  $B_1$ to be the same order of magnitude in
$B_1$ to be the same order of magnitude in  $Q$, therefore forcing that
$Q$, therefore forcing that  $A_1 = O(Q^{-2})$ and
$A_1 = O(Q^{-2})$ and  $B_1 = O(Q^{-2})$. Similarly, since
$B_1 = O(Q^{-2})$. Similarly, since  $\tilde {p}_{c2}'$ has a coefficient of
$\tilde {p}_{c2}'$ has a coefficient of  $R^{4}$ that scales as
$R^{4}$ that scales as  $Q\log Q$, if we were to write
$Q\log Q$, if we were to write  $\tilde {p}_{c2}' = A_2\tilde {p}_{11}' + B_2\tilde {p}_{12}'$, then at least one of the coefficients
$\tilde {p}_{c2}' = A_2\tilde {p}_{11}' + B_2\tilde {p}_{12}'$, then at least one of the coefficients  $A_2$ and
$A_2$ and  $B_2$ would need to tend to infinity as
$B_2$ would need to tend to infinity as  $Q^{-3}\log Q$ or faster as
$Q^{-3}\log Q$ or faster as  $|Q|\to 0$, and so we argue that
$|Q|\to 0$, and so we argue that  $A_2 = O(Q^{-3}\log Q)$ and
$A_2 = O(Q^{-3}\log Q)$ and  $B_2 = O(Q^{-3}\log Q)$.
$B_2 = O(Q^{-3}\log Q)$.
Note, however, that by evaluating the Wronskian  $\mathcal {W}(\tilde {p}_{c1},\tilde {p}_{c2};r)=W(r)$ at
$\mathcal {W}(\tilde {p}_{c1},\tilde {p}_{c2};r)=W(r)$ at  $r=1$ using (A17), and by definition of
$r=1$ using (A17), and by definition of  $\tilde {p}_{11}$ and
$\tilde {p}_{11}$ and  $\tilde {p}_{12}$ at
$\tilde {p}_{12}$ at  $r=1$, considering
$r=1$, considering  $\mathcal {W}(\tilde {p}_{11},\tilde {p}_{12};r)$ at
$\mathcal {W}(\tilde {p}_{11},\tilde {p}_{12};r)$ at  $r=1$ shows that
$r=1$ shows that
 \begin{equation} A_1B_2-A_2B_1=\frac{3(h-Q)^{2}(h+Q)^{2}(1 - h+Q)}{4Q^{2}}=O(Q^{{-}2}). \end{equation}
\begin{equation} A_1B_2-A_2B_1=\frac{3(h-Q)^{2}(h+Q)^{2}(1 - h+Q)}{4Q^{2}}=O(Q^{{-}2}). \end{equation}
This is smaller than might have been expected from the individual scalings of  $A_1$,
$A_1$,  $B_1$,
$B_1$,  $A_2$ and
$A_2$ and  $B_2$ given above, but this is expected as, when the critical point
$B_2$ given above, but this is expected as, when the critical point  $r_c^{+}$ is approached, the two linearly independent solutions lose their linear independence, so there is significant cancellation between
$r_c^{+}$ is approached, the two linearly independent solutions lose their linear independence, so there is significant cancellation between  $A_1B_2$ and
$A_1B_2$ and  $A_2B_1$.
$A_2B_1$.
Note also from (A17) that as  $|Q|\to 0$, we have
$|Q|\to 0$, we have
 \begin{equation} W(r^{*})=\begin{cases} -\dfrac{3Q^{2}}{4} \left( 1+\dfrac{Q}{1 - h}\right), & r_0\leq 1-h, \\ -\dfrac{3(1 - h - r_0)^{4}}{4r_0} \left(\dfrac{1 - h}{Q^{2}}+ \dfrac{1}{Q}+O(1) \right) & r_0>1-h. \end{cases} \end{equation}
\begin{equation} W(r^{*})=\begin{cases} -\dfrac{3Q^{2}}{4} \left( 1+\dfrac{Q}{1 - h}\right), & r_0\leq 1-h, \\ -\dfrac{3(1 - h - r_0)^{4}}{4r_0} \left(\dfrac{1 - h}{Q^{2}}+ \dfrac{1}{Q}+O(1) \right) & r_0>1-h. \end{cases} \end{equation}
Assuming that  $\tilde {p}_{11}$ and
$\tilde {p}_{11}$ and  $\tilde {p}_{12}$ are
$\tilde {p}_{12}$ are  $O(1)$ when
$O(1)$ when  $r$ is not close to
$r$ is not close to  $1-h$, it follows that
$1-h$, it follows that
 \begin{gather} C_1=\frac{4\alpha\,J_{m}^{\prime}(\alpha(1-h))}{3Q^{2}}+O(Q^{{-}1})=O(Q^{{-}2}), \end{gather}
\begin{gather} C_1=\frac{4\alpha\,J_{m}^{\prime}(\alpha(1-h))}{3Q^{2}}+O(Q^{{-}1})=O(Q^{{-}2}), \end{gather} \begin{gather}D_1=J_{m}(\alpha(1-h))+O(Q)=O(1), \end{gather}
\begin{gather}D_1=J_{m}(\alpha(1-h))+O(Q)=O(1), \end{gather} \begin{gather}\hat{C}_2={-}\frac{4Q^{2}}{3}\,\frac{A_2+\dfrac{{\rm i}\omega}{Z}B_2}{(1-h+Q)(h-Q)^{2}(h+Q)^{2}}= O(Q^{{-}1}\log(Q)), \end{gather}
\begin{gather}\hat{C}_2={-}\frac{4Q^{2}}{3}\,\frac{A_2+\dfrac{{\rm i}\omega}{Z}B_2}{(1-h+Q)(h-Q)^{2}(h+Q)^{2}}= O(Q^{{-}1}\log(Q)), \end{gather} \begin{gather}\hat{D}_2=\frac{4Q^{2}}{3}\,\frac{A_1+\dfrac{{\rm i}\omega}{Z}\,B_1}{(1-h+Q)(h-Q)^{2}(h+Q)^{2}}=O(1), \end{gather}
\begin{gather}\hat{D}_2=\frac{4Q^{2}}{3}\,\frac{A_1+\dfrac{{\rm i}\omega}{Z}\,B_1}{(1-h+Q)(h-Q)^{2}(h+Q)^{2}}=O(1), \end{gather} \begin{gather}\check{C}_2=\frac{{\rm \pi}\mathrm{i}(1-h)\alpha}{4}\,\hat{D}_2\,H_m^{(2)\prime}(\alpha(1-h))=O(1), \end{gather}
\begin{gather}\check{C}_2=\frac{{\rm \pi}\mathrm{i}(1-h)\alpha}{4}\,\hat{D}_2\,H_m^{(2)\prime}(\alpha(1-h))=O(1), \end{gather} \begin{gather}\check{D}_2={-}\frac{{\rm \pi}\mathrm{i}(1-h)\alpha}{4}\,\hat{D}_2\,H_m^{(1)\prime}(\alpha(1-h))=O(1). \end{gather}
\begin{gather}\check{D}_2={-}\frac{{\rm \pi}\mathrm{i}(1-h)\alpha}{4}\,\hat{D}_2\,H_m^{(1)\prime}(\alpha(1-h))=O(1). \end{gather}
We can use the above to establish that  $\psi _1$ and
$\psi _1$ and  $\psi _2$ are both order 1 quantities for particular values of
$\psi _2$ are both order 1 quantities for particular values of  $r$:
$r$:
 \begin{gather} \psi_1(r)=J_m(\alpha r)=O(1) \quad \text{for }r<1-h, \end{gather}
\begin{gather} \psi_1(r)=J_m(\alpha r)=O(1) \quad \text{for }r<1-h, \end{gather} \begin{gather}\psi_2(r)=\hat{C}_2\tilde{p}_1+\hat{D}_2\tilde{p}_2= \tilde{p}_{12}-\frac{\mathrm{i}\omega}{Z}\,\tilde{p}_{11}=O(1) \quad \text{for } r>1-h. \end{gather}
\begin{gather}\psi_2(r)=\hat{C}_2\tilde{p}_1+\hat{D}_2\tilde{p}_2= \tilde{p}_{12}-\frac{\mathrm{i}\omega}{Z}\,\tilde{p}_{11}=O(1) \quad \text{for } r>1-h. \end{gather}
We also note that  $\omega -U(r^{*})\,k=-M(k-{{\omega }/{M}}) = -\omega Q^{2} /h^{2} + O(Q^{4}) = O(Q^{2})$ for
$\omega -U(r^{*})\,k=-M(k-{{\omega }/{M}}) = -\omega Q^{2} /h^{2} + O(Q^{4}) = O(Q^{2})$ for  $r_0\leq 1-h$, and it is
$r_0\leq 1-h$, and it is  $O(1)$ for
$O(1)$ for  $r_0>1-h$, and that
$r_0>1-h$, and that
 \begin{equation} A={-}\frac{1}{3}\left( { \frac{\omega^{2}}{M^{2}} + \frac{m^{2}}{r_c^{{+}2}} } \right)\left( {\frac{1}{Q}-\frac{1}{r_c^{+}}} \right)- \frac{2m^{2}}{3r_c^{{+}3}}={-}\frac{1}{3Q}\left( { \frac{\omega^{2}}{M^{2}} + \frac{m^{2}}{r_c^{{+}2}} } \right)+O(1). \end{equation}
\begin{equation} A={-}\frac{1}{3}\left( { \frac{\omega^{2}}{M^{2}} + \frac{m^{2}}{r_c^{{+}2}} } \right)\left( {\frac{1}{Q}-\frac{1}{r_c^{+}}} \right)- \frac{2m^{2}}{3r_c^{{+}3}}={-}\frac{1}{3Q}\left( { \frac{\omega^{2}}{M^{2}} + \frac{m^{2}}{r_c^{{+}2}} } \right)+O(1). \end{equation}C.1.1. Behaviour of $k \to \omega /M$

We now use the above scalings to consider the branch point of  $\tilde {G}$ at
$\tilde {G}$ at  $k={{\omega }/{M}}$, with the aim of showing that
$k={{\omega }/{M}}$, with the aim of showing that  $\tilde {G}$ does not experience a pole at
$\tilde {G}$ does not experience a pole at  $k={{\omega }/{M}}$ for any value of
$k={{\omega }/{M}}$ for any value of  $r_0$. Recall from (3.3) that
$r_0$. Recall from (3.3) that
 \begin{equation} \tilde{G}=\frac{\left( {\omega-U(r^{*})\,k} \right)}{2{\rm \pi}\mathrm{i} r^{*}\,W(r^{*})}\, \frac{\psi_1(\check{r})\,\psi_2(\hat{r})}{C_1\hat{D}_2-\hat{C}_2D_1}. \end{equation}
\begin{equation} \tilde{G}=\frac{\left( {\omega-U(r^{*})\,k} \right)}{2{\rm \pi}\mathrm{i} r^{*}\,W(r^{*})}\, \frac{\psi_1(\check{r})\,\psi_2(\hat{r})}{C_1\hat{D}_2-\hat{C}_2D_1}. \end{equation}
Using the results above, if  $k={{\omega }/{M}}+\varepsilon \,\mathrm {e}^{\mathrm {i}\theta }$, then for
$k={{\omega }/{M}}+\varepsilon \,\mathrm {e}^{\mathrm {i}\theta }$, then for  $r_0\leq 1-h$,
$r_0\leq 1-h$,
 \begin{equation} \tilde{G}\sim\frac{M\varepsilon\,\mathrm{e}^{\mathrm{i}\theta}}{2{\rm \pi}\mathrm{i} (1 - h)}\, \frac{\psi_1(\check{r})\,\psi_2(\hat{r})}{\alpha\,J_m'(\alpha(1 - h))\,\hat{D}_2} = O(\varepsilon). \end{equation}
\begin{equation} \tilde{G}\sim\frac{M\varepsilon\,\mathrm{e}^{\mathrm{i}\theta}}{2{\rm \pi}\mathrm{i} (1 - h)}\, \frac{\psi_1(\check{r})\,\psi_2(\hat{r})}{\alpha\,J_m'(\alpha(1 - h))\,\hat{D}_2} = O(\varepsilon). \end{equation}
If instead  $r_0>1-h$, then we find that
$r_0>1-h$, then we find that
 \begin{equation} \tilde{G}\sim\frac{-Mh^{4}\varepsilon^{2}\,\mathrm{e}^{2\mathrm{i}\theta}(M-U(r_0))}{2{\rm \pi} \mathrm{i}\omega(1 - h)(1 - h - r_0)^{4}}\,\frac{\psi_1(\check{r})\, \psi_2(\hat{r})}{\alpha\,J_m'(\alpha(1-h))\,\hat{D}_2} = O(\varepsilon^{2}). \end{equation}
\begin{equation} \tilde{G}\sim\frac{-Mh^{4}\varepsilon^{2}\,\mathrm{e}^{2\mathrm{i}\theta}(M-U(r_0))}{2{\rm \pi} \mathrm{i}\omega(1 - h)(1 - h - r_0)^{4}}\,\frac{\psi_1(\check{r})\, \psi_2(\hat{r})}{\alpha\,J_m'(\alpha(1-h))\,\hat{D}_2} = O(\varepsilon^{2}). \end{equation}
In particular, in either case there is no pole of  $\tilde {G}$ at
$\tilde {G}$ at  $k={{\omega }/{M}}$. Hence we have that
$k={{\omega }/{M}}$. Hence we have that
 \begin{equation} I_\varepsilon(x) = \frac{-1}{2{\rm \pi}} \int_{0}^{2{\rm \pi}} \tilde{G} \left({{\omega}/{M}} + \varepsilon\, \mathrm{e}^{\mathrm{i}\theta}\right) \exp \left\{-\mathrm{i} x\left({{\omega}/{M}}+\varepsilon\,\mathrm{e}^{\mathrm{i}\theta}\right) \right\} \mathrm{i}\varepsilon\,\mathrm{e}^{\mathrm{i}\theta}\,\mathrm{d}\theta \to 0\quad \text{as } \varepsilon \to 0. \end{equation}
\begin{equation} I_\varepsilon(x) = \frac{-1}{2{\rm \pi}} \int_{0}^{2{\rm \pi}} \tilde{G} \left({{\omega}/{M}} + \varepsilon\, \mathrm{e}^{\mathrm{i}\theta}\right) \exp \left\{-\mathrm{i} x\left({{\omega}/{M}}+\varepsilon\,\mathrm{e}^{\mathrm{i}\theta}\right) \right\} \mathrm{i}\varepsilon\,\mathrm{e}^{\mathrm{i}\theta}\,\mathrm{d}\theta \to 0\quad \text{as } \varepsilon \to 0. \end{equation}C.1.2. Behaviour of ${\rm \Delta} \tilde {G}_{\omega /M}$ as $k \to \omega /M$


We now substitute all of the above into the equation for  ${\rm \Delta} \tilde {G}_{{{\omega }/{M}}}$ given in (3.16a). First, we rewrite (3.16a) exactly as
${\rm \Delta} \tilde {G}_{{{\omega }/{M}}}$ given in (3.16a). First, we rewrite (3.16a) exactly as
 \begin{gather} {\rm \Delta} \tilde{G}_{{{\omega}/{M}}}=\frac{4A(\hat{D}_2\,\psi_1^{-}(1 - h))^{2}\,f(r)\,f(r_0)\, j(r^{*})}{3(1-h)Q^{3}({C_1^{-}\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}) ({C_1^{-}\hat{D}_2-\hat{C}_2D_1})}, \end{gather}
\begin{gather} {\rm \Delta} \tilde{G}_{{{\omega}/{M}}}=\frac{4A(\hat{D}_2\,\psi_1^{-}(1 - h))^{2}\,f(r)\,f(r_0)\, j(r^{*})}{3(1-h)Q^{3}({C_1^{-}\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2}) ({C_1^{-}\hat{D}_2-\hat{C}_2D_1})}, \end{gather} \begin{gather}\text{where}\quad j(r_0) ={-}\frac{3}{4}\,(1-h)Q^{3}\,\frac{\omega-U(r_0)\,k}{r_0\,W(r_0)} \quad\text{and}\quad f(r) = \begin{cases} \dfrac{\psi_1^{-}(r)}{\psi_1^{-}(1 - h)}, & r < r_0,\\ \dfrac{D_1\,\psi_2^{-}(r)}{\hat{D}_2\,\psi_1^{-}(1 - h)}, & r > r_0. \end{cases} \end{gather}
\begin{gather}\text{where}\quad j(r_0) ={-}\frac{3}{4}\,(1-h)Q^{3}\,\frac{\omega-U(r_0)\,k}{r_0\,W(r_0)} \quad\text{and}\quad f(r) = \begin{cases} \dfrac{\psi_1^{-}(r)}{\psi_1^{-}(1 - h)}, & r < r_0,\\ \dfrac{D_1\,\psi_2^{-}(r)}{\hat{D}_2\,\psi_1^{-}(1 - h)}, & r > r_0. \end{cases} \end{gather}
Taking now the leading-order terms as  $k \to {{\omega }/{M}}$, we find that
$k \to {{\omega }/{M}}$, we find that
 \begin{gather} {\rm \Delta} \tilde{G}_{{{\omega}/{M}}}\sim{-}\frac{\dfrac{\omega^{2}}{M^{2}} + \dfrac{m^{2}}{(1 - h)^{2}}}{4(1-h)}\, \frac{J_m(\alpha(1 - h))^{2}}{\alpha^{2}\,J_{m}^{\prime} (\alpha(1 - h))^{2}}\,f(r)\,f(r_0)\,j(r_0), \end{gather}
\begin{gather} {\rm \Delta} \tilde{G}_{{{\omega}/{M}}}\sim{-}\frac{\dfrac{\omega^{2}}{M^{2}} + \dfrac{m^{2}}{(1 - h)^{2}}}{4(1-h)}\, \frac{J_m(\alpha(1 - h))^{2}}{\alpha^{2}\,J_{m}^{\prime} (\alpha(1 - h))^{2}}\,f(r)\,f(r_0)\,j(r_0), \end{gather} \begin{gather}\text{where}\quad f(r) = \begin{cases} \dfrac{J_m(\alpha r)}{J_m(\alpha(1 - h))}, & r < r_0,\\ \dfrac{\psi_2^{-}(r)}{\hat{D}_2}, & r > r_0, \end{cases} \end{gather}
\begin{gather}\text{where}\quad f(r) = \begin{cases} \dfrac{J_m(\alpha r)}{J_m(\alpha(1 - h))}, & r < r_0,\\ \dfrac{\psi_2^{-}(r)}{\hat{D}_2}, & r > r_0, \end{cases} \end{gather} \begin{gather}\text{and}\quad j(r_0) = \begin{cases} -\dfrac{\omega}{h^{2}}\,Q^{3}, & r_0 < 1-h,\\ \dfrac{\omega(1-U(r_0)/M)}{(r_0 - 1 + h)^{4}}\,Q^{5}, & r_0 > 1-h. \end{cases} \end{gather}
\begin{gather}\text{and}\quad j(r_0) = \begin{cases} -\dfrac{\omega}{h^{2}}\,Q^{3}, & r_0 < 1-h,\\ \dfrac{\omega(1-U(r_0)/M)}{(r_0 - 1 + h)^{4}}\,Q^{5}, & r_0 > 1-h. \end{cases} \end{gather}
Finally, setting  $k = {{\omega }/{M}} - \mathrm {i}\xi$, so that
$k = {{\omega }/{M}} - \mathrm {i}\xi$, so that  $Q = (1-\mathrm {i})h\sqrt {M\xi /2\omega } + O(\xi ^{3/2})$ (recalling that
$Q = (1-\mathrm {i})h\sqrt {M\xi /2\omega } + O(\xi ^{3/2})$ (recalling that  $\textrm {Re}(Q)\geq 0$), we find that
$\textrm {Re}(Q)\geq 0$), we find that  $j(r_0)$ may be written to leading order as
$j(r_0)$ may be written to leading order as
 \begin{equation} j(r_0) = \begin{cases} \dfrac{1+\mathrm{i}}{\sqrt{2}}\,\dfrac{hM^{3/2}}{\omega^{1/2}}\,\xi^{3/2}, & r_0 < 1-h,\\ -\dfrac{1-\mathrm{i}}{\sqrt{2}}\,\dfrac{h^{5}M^{5/2}}{\omega^{3/2}}\, \dfrac{1-U(r_0)/M}{(r_0 - 1 + h)^{4}}\,\xi^{5/2}, & r_0 > 1-h. \end{cases} \end{equation}
\begin{equation} j(r_0) = \begin{cases} \dfrac{1+\mathrm{i}}{\sqrt{2}}\,\dfrac{hM^{3/2}}{\omega^{1/2}}\,\xi^{3/2}, & r_0 < 1-h,\\ -\dfrac{1-\mathrm{i}}{\sqrt{2}}\,\dfrac{h^{5}M^{5/2}}{\omega^{3/2}}\, \dfrac{1-U(r_0)/M}{(r_0 - 1 + h)^{4}}\,\xi^{5/2}, & r_0 > 1-h. \end{cases} \end{equation}C.2. Asymptotic behaviour as $k \to k_0$

We now consider  $k\to k_0$ with
$k\to k_0$ with  $r_0>1-h$. We have that
$r_0>1-h$. We have that
 \begin{equation} r_0-r_c^{+}={-}\frac{\omega h^{2} (k-k_0)}{2Mk_0^{2}Q_0} + O((k-k_0)^{2}), \quad \text{where }Q_0 = h\sqrt{1 - \frac{\omega}{Mk_0}}. \end{equation}
\begin{equation} r_0-r_c^{+}={-}\frac{\omega h^{2} (k-k_0)}{2Mk_0^{2}Q_0} + O((k-k_0)^{2}), \quad \text{where }Q_0 = h\sqrt{1 - \frac{\omega}{Mk_0}}. \end{equation}
Hence in this limit,  $\tilde {p}_1(r_0)$ and
$\tilde {p}_1(r_0)$ and  $\tilde {p}_2(r_0)$ may always be evaluated in terms of
$\tilde {p}_2(r_0)$ may always be evaluated in terms of  $\tilde {p}_{c1}$ and
$\tilde {p}_{c1}$ and  $\tilde {p}_{c2}$, as we are always eventually within their radius of convergence. Hence in this limit,
$\tilde {p}_{c2}$, as we are always eventually within their radius of convergence. Hence in this limit,
 \begin{equation} \tilde{p}_1(r_0)=\left( {\frac{-\omega h^{2} (k-k_0)}{2Mk_0^{2}Q_0}} \right)^{ 3} + O ((k-k_0)^{4}), \quad \tilde{p}_2(r_0)=1+O((k-k_0)^{2}). \end{equation}
\begin{equation} \tilde{p}_1(r_0)=\left( {\frac{-\omega h^{2} (k-k_0)}{2Mk_0^{2}Q_0}} \right)^{ 3} + O ((k-k_0)^{4}), \quad \tilde{p}_2(r_0)=1+O((k-k_0)^{2}). \end{equation}
For  $r\not =r_0$, the Bessel function, Hankel functions, and
$r\not =r_0$, the Bessel function, Hankel functions, and  $\tilde {p}_1$ and
$\tilde {p}_1$ and  $\tilde {p}_2$ all behave as
$\tilde {p}_2$ all behave as  $O(1)$ quantities when evaluated at
$O(1)$ quantities when evaluated at  $1-h$,
$1-h$,  $r$ and
$r$ and  $1$, resulting in
$1$, resulting in  $O(1)$ behaviour for
$O(1)$ behaviour for  $C_1$,
$C_1$,  $D_1$,
$D_1$,  $\check {C}_2$,
$\check {C}_2$,  $\check {D}_2$,
$\check {D}_2$,  $\hat {C}_2$ and
$\hat {C}_2$ and  $\hat {D}_2$. It can be shown that
$\hat {D}_2$. It can be shown that  $A = O(1)$ and that
$A = O(1)$ and that
 \begin{equation} W(r_0)={-}\frac{3h^{4}\omega^{2}(k-k_0)^{2}}{4Q_0^{2}M^{2}k_0^{4}}+ O((k-k_0)^{3}). \end{equation}
\begin{equation} W(r_0)={-}\frac{3h^{4}\omega^{2}(k-k_0)^{2}}{4Q_0^{2}M^{2}k_0^{4}}+ O((k-k_0)^{3}). \end{equation}C.2.1. Behaviour of $\tilde {G}$ as $k \to k_0$, and the residue of the non-modal $k_0$ pole



Substituting all the above into (3.3) (as  $k\to k_0$ from above) gives
$k\to k_0$ from above) gives
 \begin{equation} \tilde{G}(k) = \frac{-2Mk_0^{2}(\omega-Mk_0)}{3{\rm \pi}\mathrm{i} r_0h^{2}\omega(k-k_0)}\, \frac{1}{C_1^{+}\hat{D}_2-\hat{C}_2D_1}\times \begin{cases} \hat{D}_2\,\psi_1(r), & r < r_0\\ D_1\,\psi_2(r), & r > r_0 \end{cases} + O(1), \end{equation}
\begin{equation} \tilde{G}(k) = \frac{-2Mk_0^{2}(\omega-Mk_0)}{3{\rm \pi}\mathrm{i} r_0h^{2}\omega(k-k_0)}\, \frac{1}{C_1^{+}\hat{D}_2-\hat{C}_2D_1}\times \begin{cases} \hat{D}_2\,\psi_1(r), & r < r_0\\ D_1\,\psi_2(r), & r > r_0 \end{cases} + O(1), \end{equation}
confirming a pole at  $k=k_0$ that, once integrated around, gives a residue contribution of
$k=k_0$ that, once integrated around, gives a residue contribution of
 \begin{equation} R_0^{+}(k_0) = \frac{2Mk_0^{2}(\omega-Mk_0)\,\mathrm{e}^{-\mathrm{i} k_0x}}{3{\rm \pi} r_0h^{2}\omega(C_1^{+}\hat{D}_2-\hat{C}_2D_1)}\times \begin{cases} \hat{D}_2\,\psi_1(r), & r < r_0,\\ D_1\,\psi_2(r), & r > r_0. \end{cases} \end{equation}
\begin{equation} R_0^{+}(k_0) = \frac{2Mk_0^{2}(\omega-Mk_0)\,\mathrm{e}^{-\mathrm{i} k_0x}}{3{\rm \pi} r_0h^{2}\omega(C_1^{+}\hat{D}_2-\hat{C}_2D_1)}\times \begin{cases} \hat{D}_2\,\psi_1(r), & r < r_0,\\ D_1\,\psi_2(r), & r > r_0. \end{cases} \end{equation}C.2.2. Behaviour of ${\rm \Delta} \tilde {G}_0$ as $k \to k_0$


Moreover, we may substitute all the above into  ${\rm \Delta} \tilde {G}_0$ from (3.16b) and (3.16c) to find the leading-order contribution to
${\rm \Delta} \tilde {G}_0$ from (3.16b) and (3.16c) to find the leading-order contribution to  ${\rm \Delta} \tilde {G}_0$ as
${\rm \Delta} \tilde {G}_0$ as  $k\to k_0$. First, we find the exact expression for
$k\to k_0$. First, we find the exact expression for  ${\rm \Delta} \tilde {G}_0$ to be (considering only
${\rm \Delta} \tilde {G}_0$ to be (considering only  $r_0>1-h$, as otherwise
$r_0>1-h$, as otherwise  ${\rm \Delta} \tilde {G}_0 \equiv 0$)
${\rm \Delta} \tilde {G}_0 \equiv 0$)
 \begin{equation} {\rm \Delta} \tilde{G}_0 ={-}\frac{\omega - U(r_0)\,k}{r_0\,W(r_0)}\, \frac{A\,\tilde{p}_1(r_0)}{C_1^{-}\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2} \times\begin{cases} \hat{D}_2\,\psi_1^{-}(r), & r_0 > r,\\ D_1\,\psi_2^{-}(r), & r_0 < r. \end{cases} \end{equation}
\begin{equation} {\rm \Delta} \tilde{G}_0 ={-}\frac{\omega - U(r_0)\,k}{r_0\,W(r_0)}\, \frac{A\,\tilde{p}_1(r_0)}{C_1^{-}\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2} \times\begin{cases} \hat{D}_2\,\psi_1^{-}(r), & r_0 > r,\\ D_1\,\psi_2^{-}(r), & r_0 < r. \end{cases} \end{equation}Using asymptotics above, to leading order we find that
 \begin{equation} {\rm \Delta} \tilde{G}_0 = \frac{A\omega h^{2}\,U(r_0)}{6r_0 Mk_0^{2}(r_0-1+h)}\, \frac{ (k-k_0)^{2}}{C_1^{-}\hat{D}_2-\hat{C}_2D_1+2{\rm \pi}\mathrm{i} AD_1\hat{D}_2} \times\begin{cases} \hat{D}_2\,\psi_1^{-}(r), & r_0 > r,\\ D_1\,\psi_2^{-}(r), & r_0 < r. \end{cases} \end{equation}
\begin{equation} {\rm \Delta} \tilde{G}_0 = \frac{A\omega h^{2}\,U(r_0)}{6r_0 Mk_0^{2}(r_0-1+h)}\, \frac{ (k-k_0)^{2}}{C_1^{-}\hat{D}_2-\hat{C}_2D_1+2{\rm \pi}\mathrm{i} AD_1\hat{D}_2} \times\begin{cases} \hat{D}_2\,\psi_1^{-}(r), & r_0 > r,\\ D_1\,\psi_2^{-}(r), & r_0 < r. \end{cases} \end{equation}C.3. Asymptotic behaviour as $k \to k_r$

Analogously to the derivation above for  $k\to k_0$, we consider here the limit
$k\to k_0$, we consider here the limit  $k\to k_r$. In this case, the only difference is that both
$k\to k_r$. In this case, the only difference is that both  $W(r^{*})$ and
$W(r^{*})$ and  $(\omega - U(r^{*})\,k)$ remain
$(\omega - U(r^{*})\,k)$ remain  $O(1)$ quantities whenever
$O(1)$ quantities whenever  $r\not =r^{*}$, unlike for the limit
$r\not =r^{*}$, unlike for the limit  $k \to k_0$. Otherwise, the same procedure is applicable, with, in particular,
$k \to k_0$. Otherwise, the same procedure is applicable, with, in particular,
 \begin{equation} r-r_c^{+}={-}\frac{\omega h^{2} (k-k_r)}{2Mk_r^{2}Q_r} + O((k-k_r)^{2}), \quad \text{where } Q_r = h\sqrt{1 - \frac{\omega}{Mk_r}}, \end{equation}
\begin{equation} r-r_c^{+}={-}\frac{\omega h^{2} (k-k_r)}{2Mk_r^{2}Q_r} + O((k-k_r)^{2}), \quad \text{where } Q_r = h\sqrt{1 - \frac{\omega}{Mk_r}}, \end{equation}and similarly
 \begin{equation} \tilde{p}_1(r)=\left( {\frac{-\omega h^{2} (k-k_r)}{2Mk_r^{2}Q_r}} \right)^{ 3} + O ((k-k_r)^{4}), \quad \tilde{p}_2(r)=1+O((k-k_r)^{2}). \end{equation}
\begin{equation} \tilde{p}_1(r)=\left( {\frac{-\omega h^{2} (k-k_r)}{2Mk_r^{2}Q_r}} \right)^{ 3} + O ((k-k_r)^{4}), \quad \tilde{p}_2(r)=1+O((k-k_r)^{2}). \end{equation}C.3.1. Behaviour of $\tilde {G}_r$ as $k \to k_r$


Substituting all the above into (3.3) as  $k\to k_r$ gives, to leading order,
$k\to k_r$ gives, to leading order,
 \begin{equation} \tilde{G}\sim\frac{\omega-U(r^{*})\,k_r}{2{\rm \pi}\mathrm{i} r^{*}\,W(r^{*})}\, \frac{1}{C_1\hat{D}_2-\hat{C}_2D_1}\times \begin{cases} D_1\,\psi_2(r_0), & r < r_0 \\ \hat{D}_2\,\psi_1(r_0), & r > r_0 \end{cases} = O(1), \end{equation}
\begin{equation} \tilde{G}\sim\frac{\omega-U(r^{*})\,k_r}{2{\rm \pi}\mathrm{i} r^{*}\,W(r^{*})}\, \frac{1}{C_1\hat{D}_2-\hat{C}_2D_1}\times \begin{cases} D_1\,\psi_2(r_0), & r < r_0 \\ \hat{D}_2\,\psi_1(r_0), & r > r_0 \end{cases} = O(1), \end{equation}
confirming no singular behaviour at  $k=k_r$, and in particular no pole at
$k=k_r$, and in particular no pole at  $k=k_r$.
$k=k_r$.
C.3.2. Behaviour of ${\rm \Delta} \tilde {G}_r$ as $k \to k_r$


Equations (3.16b) and (3.16c) for  $r > 1-h$ give
$r > 1-h$ give  ${\rm \Delta} G_r$ as
${\rm \Delta} G_r$ as
 \begin{equation} {\rm \Delta} \tilde{G}_r={-}\frac{\omega-U(r^{*})\,k}{ r^{*}\,W(r^{*})}\, \frac{ A\,\tilde{p}_1(r) }{C_1^{-}\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} A D_1\hat{D}_2} \times \begin{cases} D_1\,\psi_2^{-}(r_0), & r < r_0,\\ \hat{D}_2\,\psi_1^{-}(r_0), & r > r_0. \end{cases} \end{equation}
\begin{equation} {\rm \Delta} \tilde{G}_r={-}\frac{\omega-U(r^{*})\,k}{ r^{*}\,W(r^{*})}\, \frac{ A\,\tilde{p}_1(r) }{C_1^{-}\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} A D_1\hat{D}_2} \times \begin{cases} D_1\,\psi_2^{-}(r_0), & r < r_0,\\ \hat{D}_2\,\psi_1^{-}(r_0), & r > r_0. \end{cases} \end{equation}Substituting the above asymptotics into this equation gives
 \begin{align} {\rm \Delta}
\tilde{G}_r&\sim\frac{A(\omega-U(r^{*})\,k_r)\omega^{3}
h^{6}}{8r^{*}\, W(r^{*})\,M^{3}k_r^{6}(r-1+h)^{3}
}\,\frac{(k-k_r)^{3}}{C_1^{-}\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi}
A D_1\hat{D}_2}\nonumber\\& \quad\times \begin{cases}
\hat{D}_2\,\psi_1^{-}(r_0), & r_0 < r,\\
D_1\,\psi_2^{-}(r_0), & r_0 > r. \end{cases} \end{align}
\begin{align} {\rm \Delta}
\tilde{G}_r&\sim\frac{A(\omega-U(r^{*})\,k_r)\omega^{3}
h^{6}}{8r^{*}\, W(r^{*})\,M^{3}k_r^{6}(r-1+h)^{3}
}\,\frac{(k-k_r)^{3}}{C_1^{-}\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi}
A D_1\hat{D}_2}\nonumber\\& \quad\times \begin{cases}
\hat{D}_2\,\psi_1^{-}(r_0), & r_0 < r,\\
D_1\,\psi_2^{-}(r_0), & r_0 > r. \end{cases} \end{align}
Appendix D. Conjecture on the behaviour of an $n$-polynomial flow profile

In this appendix, we give an argument to support the conjectured behaviour of the critical layer contribution for large  $x$ for an
$x$ for an  $n$-polynomial flow profile given by
$n$-polynomial flow profile given by
 \begin{equation} U(r)=\begin{cases} M, & 0\leq r\leq 1-h, \\ M\left( {1-\left({1-\dfrac{1-r}{h}}\right)^{n}} \right), & 1-h\leq r\leq 1. \end{cases} \end{equation}
\begin{equation} U(r)=\begin{cases} M, & 0\leq r\leq 1-h, \\ M\left( {1-\left({1-\dfrac{1-r}{h}}\right)^{n}} \right), & 1-h\leq r\leq 1. \end{cases} \end{equation}
The three steepest descent contours will be analogous in form to those given in § 3.3.3. Setting  $r_C$ to be some solution of
$r_C$ to be some solution of  $\omega -U(r_C)\,k=0$, the solutions for small
$\omega -U(r_C)\,k=0$, the solutions for small  $|r-r_C|$ will take the form
$|r-r_C|$ will take the form
 \begin{gather} \tilde{p}_1(r)=(r-r_C)^{3}+O((r-r_C)^{4}), \end{gather}
\begin{gather} \tilde{p}_1(r)=(r-r_C)^{3}+O((r-r_C)^{4}), \end{gather} \begin{gather}\tilde{p}_2(r)=A\log(r-r_C) \tilde{p}_1(r-r_C)+1+O((r-r_C)^{2}), \end{gather}
\begin{gather}\tilde{p}_2(r)=A\log(r-r_C) \tilde{p}_1(r-r_C)+1+O((r-r_C)^{2}), \end{gather} \begin{gather}\tilde{p}_1^{\prime}(r)=3(r-r_C)^{2}+O((r-r_C)^{3}), \end{gather}
\begin{gather}\tilde{p}_1^{\prime}(r)=3(r-r_C)^{2}+O((r-r_C)^{3}), \end{gather} \begin{gather}\tilde{p}_2^{\prime}(r)=b_2(r-r_C)+O((r-r_C)^{2}), \end{gather}
\begin{gather}\tilde{p}_2^{\prime}(r)=b_2(r-r_C)+O((r-r_C)^{2}), \end{gather}
for some coefficient  $b_2$. The Wronskian will satisfy
$b_2$. The Wronskian will satisfy
 \begin{equation} \mathcal{W}(\tilde{p}_1,\tilde{p}_2;r) = W(r)\propto \frac{1}{r} \prod_{{\omega-U(r_c)\,k=0}}(r-r_c)^{2}. \end{equation}
\begin{equation} \mathcal{W}(\tilde{p}_1,\tilde{p}_2;r) = W(r)\propto \frac{1}{r} \prod_{{\omega-U(r_c)\,k=0}}(r-r_c)^{2}. \end{equation}
For the solutions expanded around the particular critical point  $r_C$, we therefore have
$r_C$, we therefore have
 \begin{equation} W(r)={-}3\,\frac{r_C}{r}\,\dfrac{\displaystyle\prod_{\omega-U(r_c)\,k=0} (r-r_c)^{2}}{\displaystyle\prod_{{\begin{array}{c} {\scriptstyle \omega-U(r_c)\,k=0 }\\ {\scriptstyle r_c\not=r_C } \end{array}}} (r_C-r_c)^{2}}. \end{equation}
\begin{equation} W(r)={-}3\,\frac{r_C}{r}\,\dfrac{\displaystyle\prod_{\omega-U(r_c)\,k=0} (r-r_c)^{2}}{\displaystyle\prod_{{\begin{array}{c} {\scriptstyle \omega-U(r_c)\,k=0 }\\ {\scriptstyle r_c\not=r_C } \end{array}}} (r_C-r_c)^{2}}. \end{equation}
As  $k\to {{\omega }/{M}}$, we have
$k\to {{\omega }/{M}}$, we have
 \begin{align} A&={-}\frac{1}{3} \left( {\frac{\omega^{2}}{M^{2}}+\frac{m^{2}}{r_C^{2}}} \right) \left( {\frac{U^{\prime\prime}(r_C)}{U^{\prime}(r_C)}-\frac{1}{r_C}} \right)-\frac{2m^{2}}{3r_C^{3}} \nonumber\\ &\sim{-}\frac{1}{3} \left( {\frac{\omega^{2}}{M^{2}}+\frac{m^{2}}{(1 - h)^{2}}} \right) \frac{n-1}{r_C-1 - h}+O(1), \end{align}
\begin{align} A&={-}\frac{1}{3} \left( {\frac{\omega^{2}}{M^{2}}+\frac{m^{2}}{r_C^{2}}} \right) \left( {\frac{U^{\prime\prime}(r_C)}{U^{\prime}(r_C)}-\frac{1}{r_C}} \right)-\frac{2m^{2}}{3r_C^{3}} \nonumber\\ &\sim{-}\frac{1}{3} \left( {\frac{\omega^{2}}{M^{2}}+\frac{m^{2}}{(1 - h)^{2}}} \right) \frac{n-1}{r_C-1 - h}+O(1), \end{align}
and also  $W(1-h)=O(1-h-r_C)^{2}$, and
$W(1-h)=O(1-h-r_C)^{2}$, and  $W(r)=O((1-h-r_C)^{-2(n-1)})$ for
$W(r)=O((1-h-r_C)^{-2(n-1)})$ for  $r>1-h$.
$r>1-h$.
Because of the  $W(r)$ scalings and the
$W(r)$ scalings and the  $\tilde {p}_1$ and
$\tilde {p}_1$ and  $\tilde {p}_2$ scalings, we also have that
$\tilde {p}_2$ scalings, we also have that  $C_1=O((1 - h-r_C)^{-2})$, while
$C_1=O((1 - h-r_C)^{-2})$, while  $D_1,\hat {C}_2,\hat {D}_2=O(1)$.
$D_1,\hat {C}_2,\hat {D}_2=O(1)$.
It then follows that
 \begin{gather} C_1\hat{D}_2-D_1\hat{C}_2=O((1 - h-r_C)^{{-}2}) \end{gather}
\begin{gather} C_1\hat{D}_2-D_1\hat{C}_2=O((1 - h-r_C)^{{-}2}) \end{gather} \begin{gather}\text{and}\quad {\rm \Delta} (C_1\hat{D}_2-D_1\hat{C}_2)= 2{\rm \pi}\mathrm{i} AD_1\hat{D}_2 = O((1 - h-r_C)^{{-}1}). \end{gather}
\begin{gather}\text{and}\quad {\rm \Delta} (C_1\hat{D}_2-D_1\hat{C}_2)= 2{\rm \pi}\mathrm{i} AD_1\hat{D}_2 = O((1 - h-r_C)^{{-}1}). \end{gather}
We further know that as  $k\to {{\omega }/{M}}$, we have
$k\to {{\omega }/{M}}$, we have
 \begin{equation} \omega-U(1-h)k=M({k-{{\omega}/{M}}}) \quad \text{and}\quad \psi_1(r),\psi_2(r)=O(1). \end{equation}
\begin{equation} \omega-U(1-h)k=M({k-{{\omega}/{M}}}) \quad \text{and}\quad \psi_1(r),\psi_2(r)=O(1). \end{equation}
Noting also that  $(1-h-r_C)=O((k-{{\omega }/{M}})^{{1}/{n}})$, we may predict the behaviour of
$(1-h-r_C)=O((k-{{\omega }/{M}})^{{1}/{n}})$, we may predict the behaviour of  $I_{{{\omega }/{M}}}$:
$I_{{{\omega }/{M}}}$:
 \begin{align} {\rm \Delta} \tilde{G}_{{{\omega}/{M}}}&\backsim\frac{(\omega-U(r^{*})\,k)A}{r^{*}\,W(r^{*})\, ({C_1\hat{D}_2-\hat{C}_2D_1})({C_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2})} \nonumber\\ &\backsim \begin{cases} \displaystyle \frac{(k-{{\omega}/{M}})(1-h-r_C)^{{-}1}}{(1-h-r_C)^{2} (1-h-r_C)^{{-}4}} \backsim \left(k-\dfrac{\omega}{M}\right){}^{1+{1}/{n}}, & r_0\leq 1-h, \\ \displaystyle \frac{(1-h-r_C)^{{-}1}}{(1-h-r_C)^{{-}2(n-1)} (1-h-r_C)^{{-}4}}\backsim \left(k-\dfrac{\omega}{M}\right){}^{2+{1}/{n}}, & r_0>1-h, \end{cases} \end{align}
\begin{align} {\rm \Delta} \tilde{G}_{{{\omega}/{M}}}&\backsim\frac{(\omega-U(r^{*})\,k)A}{r^{*}\,W(r^{*})\, ({C_1\hat{D}_2-\hat{C}_2D_1})({C_1\hat{D}_2-\hat{C}_2D_1+2\mathrm{i}{\rm \pi} AD_1\hat{D}_2})} \nonumber\\ &\backsim \begin{cases} \displaystyle \frac{(k-{{\omega}/{M}})(1-h-r_C)^{{-}1}}{(1-h-r_C)^{2} (1-h-r_C)^{{-}4}} \backsim \left(k-\dfrac{\omega}{M}\right){}^{1+{1}/{n}}, & r_0\leq 1-h, \\ \displaystyle \frac{(1-h-r_C)^{{-}1}}{(1-h-r_C)^{{-}2(n-1)} (1-h-r_C)^{{-}4}}\backsim \left(k-\dfrac{\omega}{M}\right){}^{2+{1}/{n}}, & r_0>1-h, \end{cases} \end{align}
and hence we predict that  $I_{{{\omega }/{M}}}$ decays like
$I_{{{\omega }/{M}}}$ decays like  $x^{-2-{1}/{n}}$ for
$x^{-2-{1}/{n}}$ for  $r_0\leq 1-h$, and like
$r_0\leq 1-h$, and like  $x^{-3-{1}/{n}}$ for
$x^{-3-{1}/{n}}$ for  $r_0>1-h$.
$r_0>1-h$.
In order to do the same for  $I_{r}$ and
$I_{r}$ and  $I_0$, we first note that
$I_0$, we first note that  $(r-r_C)=O(k-k_r)$ as
$(r-r_C)=O(k-k_r)$ as  $k\to k_r$, and analogously for
$k\to k_r$, and analogously for  $k\to k_0$. Further, we have
$k\to k_0$. Further, we have  $C_1,D_1,\hat {C}_2,\hat {D}_2=O(1)$ and
$C_1,D_1,\hat {C}_2,\hat {D}_2=O(1)$ and  $A=O(1)$. It is noticed that for
$A=O(1)$. It is noticed that for  $r>1-h$,
$r>1-h$,  $\tilde {p}_1(r)=O((r-r_C)^{3})$, while
$\tilde {p}_1(r)=O((r-r_C)^{3})$, while  $\psi _1(r_0),\psi _2(r_0)=O(1)$. Using the results given previously for
$\psi _1(r_0),\psi _2(r_0)=O(1)$. Using the results given previously for  $\omega -U(r^{*})\,k$, and noting that
$\omega -U(r^{*})\,k$, and noting that  $W(r_0)=O((r_0-r_C)^{2})$ for
$W(r_0)=O((r_0-r_C)^{2})$ for  $I_0$ only, and otherwise
$I_0$ only, and otherwise  $W(r_0) = O(1)$, gives us our results that
$W(r_0) = O(1)$, gives us our results that  $I_{0}$ decays like
$I_{0}$ decays like  $x^{-3}$ while
$x^{-3}$ while  $I_r$ decays like
$I_r$ decays like  $x^{-4}$, exactly as for the quadratic and linear cases.
$x^{-4}$, exactly as for the quadratic and linear cases.
The validity of the above conjecture depends on the the assumed scalings for  $\tilde {p}_{1}(r)$ and
$\tilde {p}_{1}(r)$ and  $\tilde {p}_{2}(r)$ at
$\tilde {p}_{2}(r)$ at  $r=1-h$,
$r=1-h$,  $1-h< r<1$ and
$1-h< r<1$ and  $r=1$, in the limits
$r=1$, in the limits  $k\to {{\omega }/{M}}$,
$k\to {{\omega }/{M}}$,  $k\to k_r$ and
$k\to k_r$ and  $k \to k_0\not =k_r$. Particular attention would be required for
$k \to k_0\not =k_r$. Particular attention would be required for  $n\geq 6$, where three expansions would be needed to cover the whole domain
$n\geq 6$, where three expansions would be needed to cover the whole domain  $r\in [1-h,1]$. Moreover, the locations of the
$r\in [1-h,1]$. Moreover, the locations of the  $k_\pm$ poles have a significant bearing on the overall far-field magnitude of the critical layer, and in particular whether the
$k_\pm$ poles have a significant bearing on the overall far-field magnitude of the critical layer, and in particular whether the  $k^{+}$ occurs as a convective instability or is stabilized by the boundary layer thickness.
$k^{+}$ occurs as a convective instability or is stabilized by the boundary layer thickness.



























































































































 Open access
Open access