



Nomenclature
- IoT
-
Internet of Things
- PS
-
Preexisting System
- SoS
-
System of Systems
- UAV
-
Unmanned Aerial Vehicle
- UAS
-
Unmanned Aerial System
- mUAV
-
mini Unmanned Aerial Vehicle
- MAV
-
Micro Aerial Vehicle
- NAV
-
Nano Aerial Vehicle
- PAV
-
Pico Aerial Vehicle
- SD
-
Smart dust
1.0 Introduction
Nowadays, many systems are complex and consist of independently preexisting pystems. The term preexisting pystems (PS) refers to systems that were developed and put into practice earlier. Here, we use this term PS to refer to a wide range of systems operating at different fields and categories. For instance, a disaster management system consists of preexisting and independent security, fire and rescue systems [Reference Jamshidi1]. Moreover, the cooperation of these systems can meet new needs nowadays. This combination of systems is called system of systems (SOS). There are many methods to increase the performance of an SOS. The first one is a one-by-one optimisation of PSs, and another way is to improve the cybernetic structure of SOS; additionally, both methods can be implemented simultaneously [Reference Klein and van Vliet2]. Thus, technological advancement opens a gate to new possibilities and opportunities like adding another system to an arbitrary PS and taking advantage of its benefits. Unmanned arial vehicles (UAVs) are good examples for such cases. Recently, they have been added to many PSs to improve their performance, adaptability, reliability, response time, etc. [Reference Austin3–Reference Hassanalian and Abdelkefi5] and in doing so, new SOSs are formed.
Due to UAV’s compact design, simplicity, reliability and low cost, they are being widely used for various purposes. Currently, many applications for drones are available in the world. Typically, they fall into one of the six functional categories, as shown in Fig. 1 [Reference Washington, Clothier and Silva6–Reference Bloss8]. For using a UAV in any arbitrary application, there are other necessary components as well. In the literature, they are also referred to as unmanned arial system, or UAS.

Figure 1. Drones’ categorization.
Bijjahalli et al. [Reference Bijjahalli, Sabatini and Gardi9] have discussed the challenges of providing durability, efficiency and safety requirements for UASs’ practical use. Brelje and Martins [Reference Brelje and Martins10] have studied previous commercial UASs that are electric, hybrid or turboelectric and provided a list of their advantages and disadvantages. Liu et al. [Reference Liu, Kreimeier, Stumpf, Zhou and Liu11] have reviewed previous works on personal aerial vehicles (PAVs) and reported key features of PAVs that are essential for their improvements. Washington et al. [Reference Washington, Clothier and Silva6] conducted a comprehensive review of ground risk models of UASs and found thirty-three models for estimating ground risk caused by UASs.
Beyond the military scopes, drones are deployed in dynamic civil and commercial applications, such as crowd monitoring and surveillance [Reference Finn and Wright7], aerial surveying, delivery of products, spraying insecticides [Reference Bloss8], sowing seeds, landslide measurement [Reference Vargas-Ramírez and Paneque-Gálvez12], detection of the illegal landfill [Reference Tong, Hsu and Juang13], acrobatic aerial footage in filmmaking, search and rescue operations, power lines and pipelines inspection, wildlife counting, forest fire and illegal hunting detection [Reference Beloev14, Reference Macrina, Di Puglia Pugliese, Guerriero and Laporte15–Reference Amirreze19].
As the applications of UAVs and their competitive market grow, the need for a modern design method that takes the interactions of design objectives with subsystems into account grows [Reference Abarca, Saito, Cerna, Paredes and Cuellar20]. Furthermore, the range of PSs that tend to add a UAS to improve their performance grows exponentially. The system engineering design approach, which is tightly dependent on mission objectives [Reference Nielsen, Larsen, Fitzgerald, Woodcock and Peleska18], might be the key to having a performance and cost-effective design. So, both UAS and PS applications must be carefully examined to develop a system engineering (SE) design approach for multi-rotors and a design structural matrix (DSM) [Reference Amirreze19]; ergo, this research has been conducted to be used in future projects for developing a system engineering design approach for multi-rotors and UASs.
In this paper, different UAV applications have been investigated systematically to provide a better overview of the drones system engineering design process. In Section 1.1, we will briefly discuss the design trends of UASs to answer the question of what process we will be involved in to increase the productivity of a PS using UASs. In the next section, we will present the UAS categories. This classification will help us know which class of UASs are more suitable for increasing the productivity of which PSs. In the third section, we examine the use of UASs in different PSs based on the classification performed. This section reviews the studies from a design perspective, i.e., the elements that have changed in the structure of a UAS to be suitable for use in a particular PS. In this section, an attempt has been made to review the research conducted in different UAS application fields and provide a comprehensive view of the research trend of UAS application in that field. In addition, according to the study, design challenges should be extracted to present a system design process. With this intention, the rest of this section focuses on UAS design methods, and the next section offers various classifications of UAVs, including our classification based on UAVs application.
1.1 UAS design
As mentioned before, UASs are added to PSs to boost their performance. The primary purpose of this section is to provide an overview of the UAS’s design process. There are a variety of methods to design manned and unmanned aircrafts. In statistical methods, calculations and conceptual design are obtained using the datasets originating from predesigned aircrafts [Reference Ziemer, Glas and Stenz21]. Other approaches for estimating fundamental aircraft characteristics and conceptual design processes include establishing mathematical models and assuming some parameters from an aircraft of the same class [Reference Howe22, Reference Sadraey and Bertozzi23]. In a system engineering method, by specifying the interaction of different subsystems, the systematic process of the design is performed by considering the priorities of each subsystem [Reference Gudmundsson24, Reference Sadraey25–Reference Hassanalian and Abdelkefi27].
The design methods based on a system engineering approach also start their procedure from a need or a desirable performance. As shown in Fig. 2, this initial point passes through a feasibility study and requirement analysis. Then an optimisation cycle is formed between requirement analysis and mission analysis, through which the flight scenario and design requirements are found that are the inputs for the next subsystem, which is conceptual design. The output of the conceptual design subsystem is fed to the performance and cost estimation and the process design subsystems. New performance and cost estimation findings should help a game pass through feasibility studies before moving forward with the detailed design and process planning. After the detailed design, the next subsystem is production process planning, leading to the design processes required for prototype production. Then the prototype undergoes various tests, and using the actual data obtained through the tests, a sizing optimisation loop with the feasibility study is formed. Finally, the procedure leads to a final product that goes through a final feasibility check and is then ready for production.
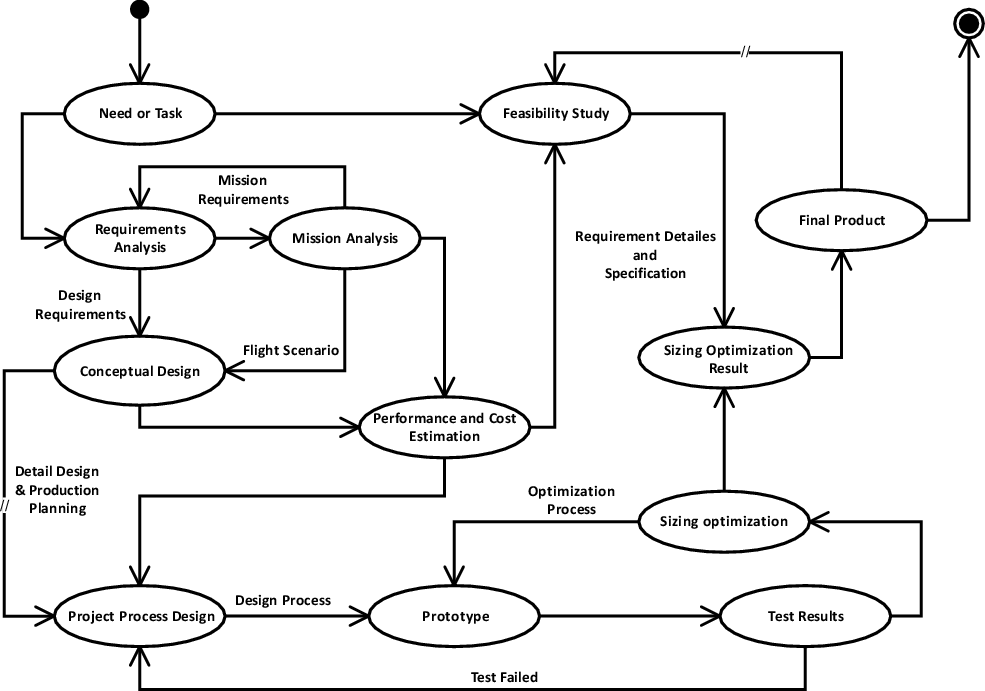
Figure 2. UAS design process overview.
UASs, as illustrated in Fig. 3, consist of diverse subsystems, including drones, control station(s), support subsystems, communication, recovery station(s), etc. [Reference Austin3]. However, the essential part of the system in design or operation is the drones.
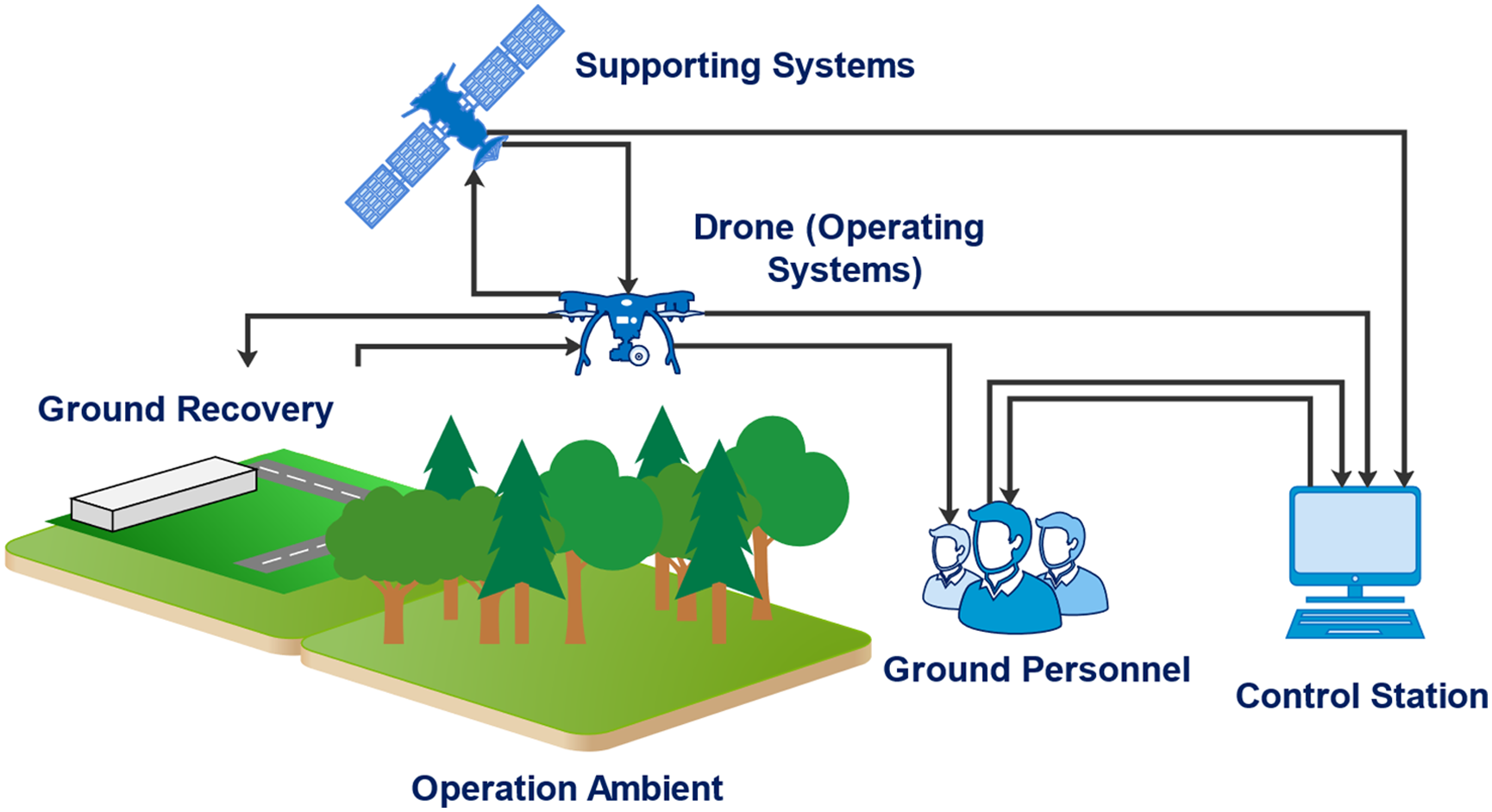
Figure 3. UAS system breakdown.
The common denominator of all these methods is the definition of the aircraft design project, which is based on its objectives and requirements. Therefore, examining the different aircraft applications will determine the performance characteristics expected from the designed UAS in the aircraft design project [Reference Bloss8, Reference Sadraey and Bertozzi23, Reference Pant, Gogate and Arora28, Reference Bonnefoy29].
From the design and operation point of view, one of the most important aspects of a UAV is the design of payload and platform subsystems. The payload subsystem includes every part of the UAV responsible for the mission. The platform subsystem of the UAV includes all the parts that provide the requirements of the payload subsystem operation. Although the pilot subsystem is installed in the platform subsystem, it is not a part of it; consequently, the cooperation of the payload and platform subsystems is an important section of system design. Payload and platform subsystems may have mutual components due to weight reduction. Nonetheless, the design should be optimised in a way that the mutual component would be able to maintain the desired performance for both payload and platform subsystems.
The installed device’s range is limited in a drone due to weight and operating conditions [Reference Sadraey and Bertozzi23, Reference Sadraey25]. Ergo, payload’s size and weight are critical factors for small unmanned aerial vehicles (UAVs). Figure 4 demonstrates an overview of drone subsystems focusing on the payload-platform interactions. This interaction is tightly dependent on mission objectives or a UAV application.
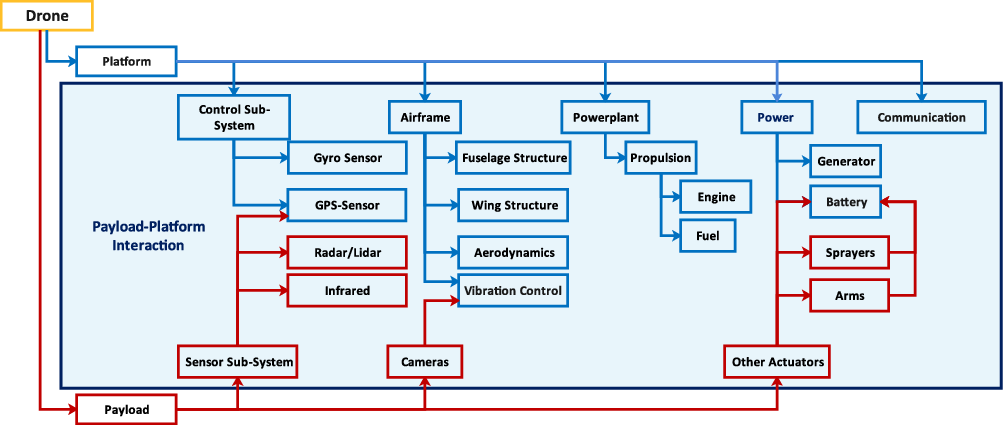
Figure 4. Payload-platform interaction.
2.0 UAVS Classification
Drones are being used in various fields, and new applications of UASs are emerging each day. Hence, to create a systematic, thorough and concise review of drone applications, a classification is needed to ensure all applications have been considered.
UAV’s classification is also important from the design perspective since, in the design process of any unmanned aerial system, referring to different classifications provides useful information for the design team. A suitable classification can lead to clearer design criteria and expectations even before beginning the design process.
Mitka and Mouroutsos [Reference Mitka and Mouroutsos26] did a noteworthy classification to show the civil and commercial applications of UAS from which the general idea of Fig. 5 was taken, and then, with putting more thoughts on it, a more concise classification was carried out as shown in Fig. 5. Macrina [Reference Macrina, Di Puglia Pugliese, Guerriero and Laporte15] expressed a spectrum for drone weights, and Hassanalian [Reference Hassanalian and Abdelkefi27] proposed a rather thorough classification. By combining their findings, Fig. 6 was illustrated, which shows UAV classifications concerning weight spectrum.
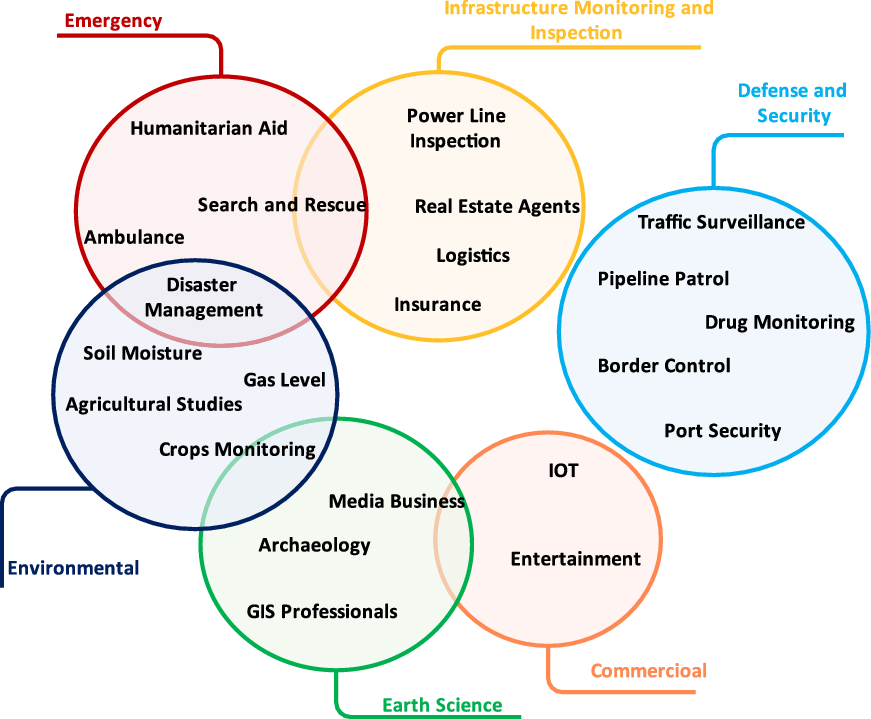
Figure 5. UAS civil and commercial applications.

Figure 6. UAV classification considering weight spectrum.
Each of the above classifications targets unmanned aerial systems from a unique viewpoint. Combining different classifications can lead to a higher level of information and knowledge that is more practical and beneficial from different aspects. In the following, We present some of the classifications obtained by reading and analyzing extensive applications and classifications of unmanned aerial systems.
The above classification provides an overview of every field of unmanned area systems applications until 2020. Although in the original classification Internet of Things (IoT) and entertainment applications were not recognised as applications of unmanned aerial systems, they have been included in this version.
Figure 6 shows a good sample of gathering and combining different classifications and reaching a higher level of information. In this classification, UAVs have been classified using the conventional weight class classification, and then they are further categorised by their structural design. Therefore, major configurations of every class are visible. Although this kind of classification does not restrict its design team to two specific configurations, it gives them insight into the types of configurations used in a specific group. Moreover, the bar on the left provides a deeper level of knowledge by showing the rotor disk diameter of every class.
Figure 7 shows the classification of drones based on their application field, which was done by Macrina [Reference Macrina, Di Puglia Pugliese, Guerriero and Laporte15]. We propose a more generalised classification of UAVs considering the classifications above, as illustrated in Fig. 8. These figures conclude various applications of UAVs. We can mention that the UAV applications fall into two major military and civilian categories. The military category of UAVs is not in the scope of this research, and we have dedicated the next section to further exploration of the civilian class. The law enforcement group could have been categorised into the military class; however, because of the close interaction of urban law enforcement with urban life, it was placed in the civilian class.

Figure 7. UAS application-oriented classification.
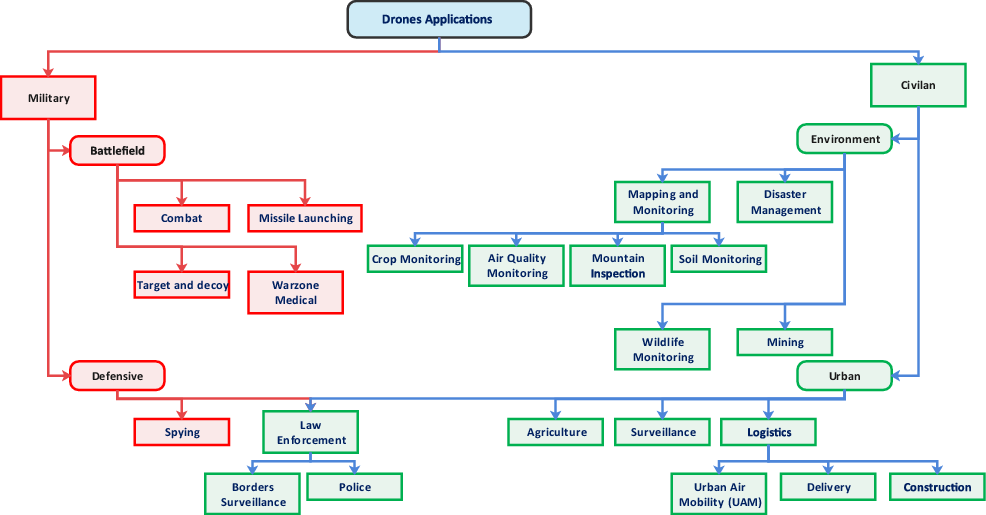
Figure 8. UAV classification.
The civilian divisions have been divided into the environment and the urban groups. The urban applications include the practice of systems more related to urban life, and the environmental applications include all other practices such as wildlife monitoring.
3.0 UAVS Applications
In this part, regarding all points mentioned above about classification, design and operational parts of UASs, we try to demonstrate the research centerpiece in civil applications of UASs. Therefore, studies in each application have been investigated from six aspects: (1) control and path planning, (2) camera and image processing, (3) sensor fusion, (4) system design, (5) aerodynamic and configuration and (6) statistic data review and analysis.
As mentioned earlier in Section 1.1, maintaining a good balance between the performance of payload and platform subsystems is a complex issue in a system engineering design approach. Therefore the six mentioned elements can be practical and useful parameters on this matter (Fig. 9). Control and aerodynamic features of a UAS are the two major parts of the platform subsystem, and their design has a massive impact on the performance and other characteristics of the platform subsystem. Image processing and sensor features are the two important parts of the payload subsystem, and their performance determines the overall performance of the UAS. System design and data review elements are key factors in the system’s life cycle.

Figure 9. Drone mapping and training elements and workflow [Reference Apvrille, Tanzi and Dugelay30].
Each subsection in this chapter focused on one specific application based on Fig. 8 classification. Additionally, we have separated technical studies (mostly experimental research directed to technical development) from other general experimental and numerical studies in each subsection.
3.1 Urban air mobility
3.1.1 General
The air-taxi concept goes back to the late 90s. Pant et al. [Reference Pant, Gogate and Arora28] proposed a new methodology to optimise the conceptual design of an air taxi. Bonnefoy [Reference Bonnefoy29] simulated air-taxi networks to better understand their behaviour. Lee et al. [Reference Lee, Bass and Patek31] presented a model for price adjustment and profit maximisation of an air-taxi network. Boyd et al. [Reference Boyd, Bass, Patek and Lee32] analysed the marketing and logistical considerations of an air-taxi service, the implemented discrete event simulation, and discovered that increasing aircraft capacity, increases passenger wait times. Baik et al. [Reference Baik, Trani, Hinze, Swingle, Ashiabor and Seshadri33] developed a model for forecasting demand for air taxis through 2030. Lee et al. [Reference Lee, Bass, Patek and Boyd34] provided a “flow model” based on their previous discrete event model, which explains the total flow of passengers and aircraft for an air-taxi provider. Mane and Crossly [Reference Mane and Crossley35] proposed an approach for the feasibility study of air-taxi transportation. Archer et al. [Reference Archer, Black and Roy36] analysed air-taxi operations, having a system-of-systems perspective. Fagerholt et al. [Reference Fagerholt, Foss and Horgen37] presented a methodology and model that helps making strategic decisions regarding establishing an air-taxi service. Van Der Zwan et al. [Reference van der Zwan, Wils and Ghijs38] developed a routing system for an air-taxi operator to optimise resources.
In those early stages, the focus was on light jets to be used as air taxis. However, with advances in technology, rotorcrafts began to be promising to be used for such purposes. Enconniere et al. [Reference Enconniere, Ortiz-Carretero and Pachidis39] analyzed the mission performance of a conceptual coaxial rotorcraft to be used as an air taxi and showed that by using this concept, fewer vehicles are needed to cover the same areas.
Johnson et al. [Reference Johnson, Silva and Solis40] proposed three different concept vehicles to be used as air taxis. Husemann et al. [Reference Husemann, Glaser and Stumpf41] suggested using fuel cells instead of batteries and showed that a significantly longer flight could be achieved by doing so. Acceptance of air taxis among people is discussed in Ref. [Reference Planing and Pinar42].
3.1.2 Technical
Yang and Wei [Reference Yang and Wei43] conducted on-demand path planning using a Monte Carlo tree search. Verma and Keeler [Reference Verma, Keeler, Edwards and Dulchinos44] increased the number of urban air mobility (UAM) by modifying the current helicopter routes and proposing a letter of agreement (LOA). Rajendran and Zack [Reference Rajendran and Zack45 estimated the demand for air-taxi services and proposed a clustering approach to determine the possible site for infrastructures. Roy et al. [Reference Roy46] proposed an approach for optimal flight scheduling, and their proposed framework is helpful in fleet-size determination to meet a given demand. They also presented a methodology for estimating the potential user base of eVTOL air taxis [Reference Roy, Kotwicz Herniczek, German and Garrow47]. Rajendran and Shulman [Reference Rajendran and Shulman48] conducted research based on discrete event simulation to determine the number of air taxis required to meet New York City’s need for UAM. Rajendran and Pagel [Reference Rajendran and Pagel49] analysed online customer reviews of helicopter services and provided managerial insights for UAM services.
Diaz et al. [Reference Ventura Diaz, Caracuel Rubio and Yoon50, Reference Ventura Diaz, Johnson, Ahmad and Yoon51] simulated ducts’ effects on coaxial rotors and analysed the aerodynamics and performance of the side-by-side air taxi. Diaz and Yoon [Reference Ventura Diaz and Yoon52] carried out a high-fidelity CFD simulation for analyzing NASA’s quadrotor urban air-taxi concept. Guruswamy [Reference Guruswamy53] simulated the takeoff and cruise of an air taxi using Navier-Stocks’ equations. Schuet et al. [Reference Schuet54] proposed a methodology for building an air-taxi model at the conceptual design level to be used for analysing flight control system safety.
3.2 Ambulance
Abrahamsen [Reference Abrahamsen55] carried out a feasibility study of using a UAV for situation assessment at the time of accidents or disasters. Thamm et al. [Reference Thamm, Brieger, Neitzke, Meyer, Jansen and Mönninghof56] explained the SONGBIRD family, in which the members are fixed-wing UASs with VTOL capabilities and are suitable for various applications including injured assistance before the arrival of an ambulance. Mihai et al. [Reference Mihai, Vidan, Pahonie, Matei, Stoica and Adochiei57] presented a semi-autonomous aerial vehicle to transport medical equipment in emergencies. Kumar and Jeeva [Reference Kumar and Jeeva58] proposed using a drone, which carried a first aid kit and fire extinguishing ball and has audio and video communication ability, as an ambulance for outdoor sports. The main goal is to provide help in emergency conditions as soon as possible. Rizwan et al. [Reference Rizwan, Shehzad and Awais59] developed a rapid response unit using a quadcopter which is incorporated for an optimum aerial aid system. Their proposed system consists of health monitoring and calling subsystems for a field worker and a base in which quadcopters are kept. Liu et al. [Reference Liu, Lv, Gao, Li, Lan and Gao60] designed and developed an information processing system for earthquake rescue mission applications using a multi-rotor UAV, which recommends a rescue plan. Sudula [Reference Sudula61] designed and developed a quadcopter for civil applications such as search and rescue. Sanjana and Prathilothamai [Reference Sanjana and Prathilothamai62] designed and built a quadcopter for first aid kit delivery and remote patient diagnosis in case of emergency. Zhang et al. [Reference Zhang63] performed a feasibility study on multi-rotor usage for emergency medical services. The results showed that drones have better performance than road transfers in emergencies.
3.3 Mapping
Madawalagama et al. [64] performed a feasibility study on aerial mapping using consumer-grade drones. They used Phantom-3 Professional drone successfully in their study to cover an area of 1.28 km2. Sonnemann et al. [Reference Sonnemann, Hung and Hofman65] implemented a photogrammetric method using a UAS to fill the knowledge gap on a local scale in the absence of high-resolution LiDAR data. Ventura et al. [Reference Ventura, Bruno, Lasinio and Belluscio66] used a drone to make fine-scale maps of fish nursery areas. Radjawali et al. [Reference Radjawali, Pye and Flitner67] shared their drone experience to produce high-quality community-controlled maps. Soh and Choi [Reference Suh and Choi68] used a Phantom-2 Vision+ for mapping subsidence hazards around mine sites. Kalantar et al. [Reference Kalantar, Mansor, Sameen, Pradhan and Shafri69] used a UAV and employed an innovative approach integrating fuzzy unordered rule induction algorithm (FURIA) into object-based image analysis (OBIA) and achieved accurate land-cover mapping. Paneque-Gálvez et al. [Reference Paneque-Gálvez, Vargas-Ramírez, Napoletano and Cummings70] used a drone for indigenous territory mapping, and their initial results were promising. Gupta and Shukla [Reference Gupta and Shukla71] carried out landside inventory mapping using a DJI Phantom-3 Advanced Drone. Their 3D model was validated with actual measurements and had less than 5% error. Yang et al. [Reference Yang72] developed a training program for researchers and community members to use commercial drones for mapping purposes.
3.4 Disaster management
3.4.1 General
Information plays a key role in correctly managing the consequences and results of natural disasters. During floods or cyclones, millions of people are affected. These people need emergency foods, medicines, and many other commodities. Control engineering and material science innovations led to the emergence of small-scale unmanned aerial vehicles (UAVs) integration with cameras and sensors. Although drones cannot carry a large number of reliefs such as food or blankets, they can carry emergency medicines, water purification tablets, and lightweight commodities to the affected people when there is no easy way to reach them. Detecting the victims as soon as practicable is more critical for actual rescue operations than perceiving a disastrous environment, which is required for a rescue mission. In such cases, airborne cameras and sensors gain treasured sources of information that allow us to construct an “overview” of the environment and estimate the current situation.
3.4.2 Technical
Kazi Mahmud Hasan et al. [Reference Hasan, Newaz and Ahsan73] designed and developed a low-cost aircraft type autonomous portable drone targeting surveillance and disaster management. The drone has been recommended not only is mobile but also lands vertically (VTOL) with no runway requirement. Aakash Sehrawat et al. [Reference Sehrawat, Choudhury and Raj74] work on the design consists of a Quadcopter with a Wi-Vi sensor, infrared camera, and GPS to quickly track humans from a distance in areas that are not quickly reachable over land and/or are not safe for an uninformed human to explore. Seoungjun Lee et al. [Reference Lee, Har and Kum75] claims that drone has become an effective tool for searching for survivors from confined space such as collapsed building or underground area. Their research focuses on proposing an overall architecture for drone hardware that enables fast exploration of GPS-denied environments, and practical methods for victim detection are introduced. Ludovic Apvrille et al. [Reference Apvrille, Tanzi and Dugelay30] worked on bringing autonomy to drones: to fly autonomously, e.g., scanning and covering a given area, and to realize some tasks (e.g., identifying groups of disabled persons). Various experiences and several projects that use drones to help with disaster relief have been discussed by Agoston Restas [Reference Quaritsch, Kruggl, Wischounig-Strucl, Bhattacharya, Shah and Rinner76]. He also discusses various drone application potential for avoiding and reacting to hazardous materials catastrophes [Reference Restas77]. Moreover, he claims to support water-related disaster management. There are three different options for using drones: (a) Before floods, drones can take river bed surveys as a kind of preventive application, and (b) During a flood, drones can support decision-makers with the “eagle eye” view of the flooded area providing objective and relevant information, (c) After a disaster, Drones could also be utilized to map or remap the affected area to make an abrupt assessment of flood damage by Experts. Experts can use [Reference Restas78]. Boualem Rabta et al. [Reference Rabta, Wankmüller and Reiner79] research considers drone applications in the last-mile distribution in humanitarian logistics and presents an optimization model for the delivery of multiple packages of lightweight relief. Collaborative mapping of an earthquake-damaged structure was attended by a team of ground and aerial robots reported by N. Michael et al. in the results of their recent experiments [Reference Veroustraete80] N. Michael et al. [Reference Michael81]. Also, Abrahamsen [Reference Abrahamsen55] carried out a feasibility study of using a UAV for situation assessment. Milan Erdelj et al. ’s [Reference Erdelj, Natalizio, Chowdhury and Akyildiz82] research for network-assisted first response to disaster management covers disaster prediction, assessment, and response, presenting network architectures for geophysical, climate-induced, and meteorological disasters based on the interaction between the UAV and wireless sensor network. M. Quaritsch et al. [Reference Quaritsch, Kruggl, Wischounig-Strucl, Bhattacharya, Shah and Rinner76] report on their research on deploying small-scale UAVs carrying cameras for disaster management applications. In this study, UAVs fly in formations and cooperate to achieve a certain mission.
3.4.3 Practical report
In May 2012, two major earthquakes occurred in the Emilia-Romagna region, Northern Italy, followed by further aftershocks and earthquakes in June 2012 Geert-Jan M. The Italian National Fire Corps set up disasters and helped people and buildings recover. Geert-Jan M. To that purpose, from Tuesday, 24 July to Friday, 27 July 2012, NIFTi deployed a network of experts and robotic systems (UGV, UAV) in the red zone of Mirandola, Emilia Romagna. Kruijff and his team described the deployment and experience [Reference Kruijff83]. According to Milan Erdelj and Enrico Natalizio in UAV-assisted disaster management applications, UAVs not only assess the damaged region but also help establish a network connection between disaster victims, rescue personnel, and the nearest accessible cellular infrastructure [Reference Erdelj and Natalizio84]. In January 2005, commercially accessible urban search and rescue robots and professional operators were provided due to aid Ventura County La Conchita, California, mudslide Fire Rescue Department by CRASAR (The Center for Robot-Assisted Search and Rescue). Robin R. Murphy and Sam Stover [Reference Murphy and Stover85] form a descriptive study of what mudslide responses are like, what tasks robots are needed for, how the rescue robots perform, and how responders view the robots. Their observations are captured in fourteen findings on robot performance, domain characteristics of mudslides, and general rescue robot design issues.
3.5 Agricultural
3.5.1 General
Veroustraete [Reference Veroustraete80] and Stehr [Reference Stehr86] discuss that drone usage is beneficial in agriculture, especially for product monitoring. Navia et al. [Reference Navia, Mondragon, Patino and Colorado87] used an autonomous quadcopter, having a multispectral camera, to monitor crop fields in Colombia. Puri et al. describe the importance of using drones in agriculture in their paper [Reference Puri, Nayyar and Raja88].
3.5.2 Technical
Saheb and Babu [Reference Saheb and Babu89] designed and built a quadcopter for agricultural usages such as seed sowing, plant spraying, and monitoring. Koh and Wich [Reference Koh and Wich90] developed and used an inexpensive one for forest surveillance and mapping. Dahn et al. [Reference Danh, Tuyen and Duy91] designed and tested an autopilot system for a quadcopter to take aerial photos, and their system can be used for remote sensing in agriculture. Ribeiro et al. [Reference Ribeiro-Gomes, Hernández-López, Ortega, Ballesteros, Poblete and Moreno92] proposed a new calibration algorithm that uses neural networks and considers sensor temperature and microbolometers’ digital response as input data. Yadav et al. [Reference Yadav, Singh, Singh, Chauhan, Gopal and Singh93] designed a semi-autonomous quadcopter to be used for agricultural spraying and surveillance. Kurkute et al. [Reference Kurkute94] designed an agricultural drone to spray pesticides. Huuskonen and Oksanen [Reference Huuskonen and Oksanen95] used a drone to create a soil map and then implemented an approach to determine the locations of soil samples. Kim et al. [Reference Kim, Kim, Ju and Son96] discussed the use of both fixed-wing and rotary-wing UAVs in precision agriculture and provided comparative information on their equipment, applications, and control strategies. Daponte et al. [Reference Daponte97] also analyzed precision agriculture techniques using drones having multispectral and thermal cameras. Hassler and Baysal-Gurel [Reference Hassler and Baysal-Gurel98] reviewed the use of UAS in precision agriculture and discussed the pros and cons of using this technology. Merwe et al. [Reference van der Merwe, Burchfield, Witt, Price and Sharda99] provided an overview of the advancement of agricultural drones, methods used for data quality assurance, and some examples of existing and developing applications of agricultural drones. Xu et al. [Reference Xu100] developed a new algorithm for cattle counting in different situations such as pastures and feedlots. Mahajan and Bundel [Reference Mahajan and Bundel101] proposed a cheaper method than spatial satellite sensors for estimating the growing crop health, using images taken by a drone having modified airborne cameras and sensors. Patel et al. [Reference Patel, Patel, Faldu and Dave102] designed and developed a quadcopter for crop surveillance that can distinguish the infected, deceased, and matured crops from each other.
3.6 Wildlife monitoring
3.6.1 General
To construct aerial surveys that provide accurate and comprehensive estimates, population managers should evaluate current data on population density, distribution, and survey intensity. Images of digitized color-infrared photos were taken with a single 12-megapixel camera that did not provide an integrated hot-mirror filter and had a red-light-blocking filter in front of the lens, resulting in images of near-infrared (NIR), green, and blue. Aerial surveys are a profitable instrument for wildlife study and management. Indeed, unmanned aerial vehicles (UAVs) may offer promise for addressing problems and become a valuable tool for many wildlife applications, such as collecting low-altitude aerial imagery. Impact studies leading to suggestions for best practices are critically needed in ecological research, particularly when approaching vulnerable animals in inaccessible locations. Regular observation of animal populations is obligatory to maintain wildlife protection, especially when animal populations are in danger. UASs have numerous advantages, including high geographical and temporal resolution data, providing systematic, permanent data, operational expenses, and less danger for operators. The importance of structural diversity and niche variations within ecosystems in maintaining species coexistence cannot be overstated. UAVs integrated with competent sensors may provide precise spatial resolution data at end-user-specified temporal resolutions. UAV platform design recent advancements have been complemented by upgrading navigation and the downsizing of sensor technology, enabling the close-range study of individual organisms and their spatiotemporal dynamics [Reference Anderson and Gaston103]. Observing wild animals while avoiding human interference remains a significant methodological issue.
3.6.2 Technical
During 2002 and 2003, G. P. Jones IV et al. [Reference Jones, Pearlstine and Percival104] showed for small UAVs (1.5-m wingspan UAV equipped with autonomous control and video equipment) to be useful as management or research tools, they should be durable, modular, electric-powered, capable of being launched and recovered in rough terrain, autonomously controlled, operable with minimum training, and capable of collecting georeferenced imagery E. Raymond Hunt et al. [Reference Hunt, Hively, Fujikawa, Linden, Daughtry and McCarty105] tested the UAV-camera system over two variably fertilized fields of winter wheat and found a good correlation between leaf area index and the green normalized difference vegetation index (GNDVI). Luis F. Gonzalez et al. [Reference Gonzalez, Montes, Puig, Johnson, Mengersen and Gaston106] presented a system that includes thermal image acquisition as well as a video processing pipeline to perform object detection, classification, and tracking of wildlife in the forest or open areas. Margarita Mulero-Paâzmaâny et al. [Reference Mulero-P107] reviewed the existent literature about animals’ responses to UAS flights and conducted a pooled analysis of the data to determine the probability and intensity of the disturbance, and The wildlife reactions are affected by both the features of the UAS (flight pattern, engine type, and aircraft size) and the attributes of the animals themselves (type of animal, life-history stage, and level of aggregation). The effects of drone color, speed, and flying angle on mallard behavior have been investigated by Elisabeth Vas et al. [Reference Hardin and Jensen108] in a semi-captive scenario. Elisabeth Vas et al. [Reference Vas, Lescroel, Duriez, Boguszewski and Gremillet109] Performed 204 approach flights with a Quadcopter drone, and during 80% of those. They could approach unaffected birds within 4 m. David W. Casbeer et al. [Reference Casbeer, Li, Beard, Mehra and McLain110] present an effective UAV path planning algorithm utilizing infrared images that are collected onboard in real-time monitoring large forest fires. J. Lee et al. [Reference Kalyanam, Chandler, Pachter and Darbha111] present a strategy of path-planning for an unmanned aerial vehicle (UAV) to follow a ground vehicle. The path-planning algorithm was built on top of a system that currently estimates the UAV’s dynamics to keep the project’s emphasis on path-planning techniques. J. H. Perry et al. [Reference Watts112] discussed the subsystems and potentials of a small UAS developed for wildlife and ecological monitoring. Jarrod C. Hodgson et al. [Reference Hodgson113] used the UAV method to monitor wildlife in tropical environments and showed that UAV-derived results from counting colony nesting birds are more precise than conventional ground counts. Radiansyah et al. [Reference Radiansyah, Kusrini and Prasetyo114] examine quadcopter (camera: 12–24 M.P. altitude ranges: 50–200 m above ground level) application for wildlife monitoring; measure the accuracy of data generated, and determine effective, efficient, and appropriate technical recommendations; under the ethics of wildlife photography(producing aerial photographs with a spatial resolution of 0.85–4.79 cm/pixel). P. J. Hardin1 et al. investigated challenges and opportunities using RPVFootnote 1 in Environmental Remote Sensing, and also study about the design process of inexpensive, lightweight sensor packages for environmental tasks and the improvement of image processing algorithms to interpret, rectify RPV, and manage imagery [Reference Hardin and Jensen108, Reference Hardin and Hardin115].
3.6.3 Practical report
J. Paneque-Gálvez et al. [Reference Paneque-Gálvez, McCall, Napoletano, Wich and Koh116] assess: (1) the feasibility of using small, low-cost drones (i.e., remotely piloted aerial vehicles) in CBFM programs; (2) their potential advantages and disadvantages for communities, partner organizations, and End-users of forest data; and (3) the extent to which their usage, in conjunction with ground surveys and local biological knowledge, might improve tropical forest monitoring. In an attempt to establish an appropriate conversion factor for predicting total seasonal nesting activity from aerial samples, the findings of the 1981 study were compared with those of concurrent ground surveys on various beaches. Ewins and Miller (1995) [Reference Sardà-Palomera117] also worked on “Measurement Error in Aerial Surveys of Osprey Productivity.” A comparison of fixed-wing and rotary-wing aircraft was carried out in 1992–1993, and both types were used to count chicks. Due to this study, Fixed-wing surveys underestimated total chick numbers (P = 0.03), but rotor-wing survey counts by both observers did not differ from actual nest contents (P = 0.7). The variation in chick totals between observers was higher on fixed-wing surveys than on rotor-wing surveys. Linchant [Reference Linchant118] reviewed studies in which wildlife populations were monitored using drones. The sensors are often electro-optic or infrared cameras, although novel sensors can be developed and tested. Ferreira and Aarde [Reference Ferreira and van Aarde119] simulated survey intensities to determine which could yield accurate and precise population estimates and detect population changes for several African elephants (Loxodonta Africana) populations. R. T. Kingsford’s [Reference Kingsford120] study highlights the use of waterbird communities as potential measures of river and floodplain health on a landscape scale. The potential of unmanned aerial vehicles (UAVs) examined by Luke Wallace et al. comparing the attainable precision of a new constructed UAV-borne LiDAR system to a conventional full-scale system. Luke Wallace et al. [Reference Wallace, Lucieer, Turner and Watson121] D. Chabot and D. M. Bird [Reference Kalyanam, Chandler, Pachter and Darbha111] compared photographic counts from repeated flybys to repeated visual ground counts to assess a low-end model for surveying flocks of Canada Geese and Snow Geese [Reference Sardà-Palomera117] reported on implementing small UAS for surveilling changes in breeding population size of a ridiculous colony. James A. Rodgers et al. [Reference Rodgers, Linda and Nesbitt122] used a fixed-wing UAV in Florida to estimate wood stork nests.
Remotely sensed LiDAR data has become an essential tool in contemporary forest inventory management. Reference [Reference Getzin, Wiegand and Schöning123] shows that aerial images of canopy gaps can be used to assess the floristic biodiversity of the forest understory. This approach was made possible using high-tech UAVs and high-quality images of the canopy characteristics. that comprehensive, spatially implicit information on gap shape measurements is adequate to show the significant relationship between disturbance patterns and plant diversity demonstrated in this study [Reference Le Maho124, Reference Hernandez, Murcia, Copot and Keyser125] they worked on minimizing rovers’ human disturbance in research on wild animals by using a UAS. a combined use of GPS data logger information collected from free-roaming birds and environmental information captured by UASs characterized in A. Rodrguez et al. study. A. Rodr´guez et al. [Reference Rodríguez, Negro, Mulero, Rodríguez, Hernández-Pliego and Bustamante126] studied the habitat selection of a small raptorial bird, the lesser kestrel Falco Naumanni, foraging in a highly dynamic landscape. They showed that using UASs is beneficial for a broad range of wildlife research.
3.7 Law enforcement
There have been many signs of interest for Law Insurance Applications of Quadcopters in the United States and all around the world in the past decades. The border of a country defines its political boundaries and areas of its jurisdictions. An individual border zone monitoring is assigned to a squad of unmanned aerial vehicles (UAVs). A border region is defined to be a geographical region that is, in general, like a line: thin and long. A particular border region is split into sectors that are roughly the same in shape and size. Each aircraft is assigned a sector. If any UAV detects an event or target, it alerts its operator. If the operator deems the target is essential, the UAV is commanded to follow it. The sectors are then dynamically reassigned among the remaining UAVs [Reference Girard, Howell and Hedrick127, Reference Bein, Bein, Karki and Madan128]. As mentioned in previous parts, Unmanned Arial Vehicles (UAVs) can fly over dangerous situations with no human life risk. Moreover, it makes them suitable for long-range and long-endurance operations like border patrol [Reference Kalyanam, Chandler, Pachter and Darbha111, Reference Girard, Howell and Hedrick127, 129–Reference Beard, McLain, Nelson, Kingston and Johanson132]. On several occasions, Congress in the United States has authorized DHS to investigate the possibility of deploying UAVs and utilizing the technology to monitor the border. The Intelligence Reform and Terrorism Prevention Act (P.L. 108–458) passed by the 108th Congress includes provisions for a pilot program to explore the deployment of current technologies, including UAVs, along the northern border. The President was obligated to provide a report “on the use of unmanned aerial vehicles for the support of homeland security missions” under the 2003 DOD Authorization Act (P.L. 108–136). The conference report to the FY2007 DHS Appropriations Act (P.L. 109–295) in the 109th Congress encouraged DHS to collaborate with the FAA to develop a pilot program for the use of UAVs to surveil the northern border. To respond to the congressional regulations, DHS has implemented unmanned aerial vehicles (UAVs) to monitor the US-Mexico border in some specific border areas since June 2004 [Reference Haddal and Gertler133].
Compared to border guards on patrol or fixed surveillance equipment, the range of UAVs is a considerable benefit. Suppose an unauthorized border entrant attempts to cross via dense forests or mountainous terrain. In that case, UAVs with thermal detection sensors have a better chance of locating the violation than stationary camera equipment commonly employed on borders. Despite the potential benefits of deploying UAVs, 2003 research expressed worry about the high accident risk of UAVs, which can be several times that of human aircraft. Furthermore, if a manned aircraft’s control systems fail, a well-trained pilot is better positioned to find the source of the problem due to his or her physical proximity; however, if a UAV encounters a similar system failure or if a UAV landing was attempted during difficult weather conditions, the ground control pilot would be at a disadvantage because he or she is removed from the event. The remote pilot, unlike a person pilot, would be unable to analyze critical sensory information such as wind speed. Furthermore, the expenses of operating a UAV are more than double those of a human aircraft, according to the CBP Inspector General. This is because UAVs demand extensive logistical support as well as specific operator and maintenance training [Reference Haddal and Gertler133].
People in the disaster have been aided by Unmanned aerial vehicles (UAV) or drones due to recent technology maturation. Mainly, it would be incredibly beneficial for law-enforcement missions. An assistant drone that can support law-enforcement officers has the potential to increase safety and reduce the number of casualties by detecting and spotting hostile targets in advance during the operation.
Police often operate alone or in small groups throughout the clearing operation, which may confront unpredictable occurrences or a surprise ambush from the hostile target and respond quickly and adequately to the possible threat. Drone swarms (multiple UAVs) are more efficient than a single drone in the searching process, and a swift clearing operation means less possibility of injuries. UAVs have been successfully applied and deployed in the military field since the 1910s. UAVs can quickly respond to the orders to search particular areas and deliver support and feedback in real-time massage with limited operator exposure to the hazards and risks [Reference Greenwood, Nelson and Greenough134]. Due to their characteristics, the UAVs can be suitable tools for the law-enforcement agency to deal with a wide variety of situations. Although a helicopter may do the same operations as a drone, its material, and operational expenses are significant. According to data from the US Department of Justice, the average price of a helicopter is over 30 times that of a UAV, and the average operating and maintenance cost is nearly 16 times that of a UAV [Reference Valdovinos, Specht and Zeunik135]. drones not only can operate in natural disasters rescuing, heavy snowfalls, and strong winds searching, but also can locate building firefighters, police, hostage, suspects, and terrorist in a building or a room [Reference González-Jorge, Martínez-Sánchez, Bueno and Arias136]. Since the implementation of drone technology, drones have exhibited the capability to capture detailed images and search large areas, cooperate with other drones [Reference Xu137–Reference Govindarajan and Sridharan140], and have autonomous flight within an indoor environment [Reference Mac141]. Schnieders et al. [Reference Schnieders, Wang, Stone, Backous and Danford-Klein142] evaluated a single drone to assist law enforcement agencies in a simulated building clearance operation to address the interior dangers of law-enforcement clearing operations. He argued that, due to the improvement of microchips of drones, drones could move indoor environments with high-quality streaming and maneuverability capability; drones fit into law-enforcement clearing operations [143–Reference Guo and Leang145].
3.8 Logistic
3.8.1 Technical
Unmanned aerial vehicles, or systems, have emerged as a promising mode of fast, energy-efficient, and cost-effective Logistics tools, mostly having sophisticated applications like package delivery. Joshuah K. Stolaroff et al. [Reference Stolaroff, Samaras, O’Neill, Lubers, Mitchell and Ceperley139] showed that although drones consume less energy per package-km than delivery trucks, the additional warehouse energy required and the longer distances traveled by drones per package significantly increase the life-cycle impacts. Govindarajan and Sridharan estimated the sizing and performance of four VTOL configurations, which are being used in package delivery missions [Reference Govindarajan and Sridharan140]. A gradient-based optimization approach was used to determine the optimum designs for each configuration under each weight class. According to the findings of this study, the hexacopter outperformed the quadrotor in terms of using less installed power and delivering more oversized payload packages for a given radius of action.
Indeed, more than 25% of research in the field of logistic application of UASs, focuses on its Designing methods and challenges. By combining the concurrent scheduler technique with a genetic algorithm, San et al. [Reference Vempati, Crapanzano, Woodyard and Trunkhill146] created a UAV delivery system that manages delivery order assignments, autonomous flight operation, real-time control for UAV flights, and delivery status tracking. Dyutimoy Nirupam Das and Partners propose [Reference Das, Sewani, Wang and Tiwari147] presents a mechanism that synchronizes drones and delivery trucks, where trucks can work as mobile launching and retrieval sites. Aaron P. Bauer et al. [143] develop some proposed methods and devices that enable multi-rotors to deploy one-to-two pound objects on or near doors while in flight to overcome obstacles. During these search and rescue efforts, within damaged structures.
Moreover, another technical challenge that attracted more than 28% of researchers to work on is Control, Stability, and Path Planning. In this sector, the safe and effective operation of unmanned aerial vehicles (UAVs) is a challenge that necessitates obstacle avoidance methods as well as improved trajectory planning and control schemes for stability and energy efficiency. As a result, Hossein Eslamiat et al. [148] suggested an autonomous waypoint planning framework, trajectory creation using waypoints, and trajectory tracking for multi-rotor Unmanned Aerial Vehicles (UAVs). M. Khosravi and H. Pishro-Nikaims [Reference Junaid, Konoiko, Zweiri, Sahinkaya and Seneviratne149] tend to develop UAV trajectories that optimize package delivery time while still providing consistent coverage across a local community, which is required for applications like network coverage or surveillance. Inkyung et al. [Reference Sung and Nielsen144] propose a systematic approach that decomposes a service area into several disjoint zones to deploy large numbers of UAVs to properly handle increasing demands for the service by the units Planning Paths for Package Delivery in Heterogeneous Multirobot Teams. Neil Mathew et al. [Reference Mehndiratta, Kayacan and Kayacan150] concentrated on the job scheduling and path planning for a group of vehicles performing autonomous delivery in urban areas. Suttinee Sawadsitang and Dusit Niyato 157 present the framework for combined ground and aerial delivery service optimization and planning (GADOP). The architecture specifically accounts for the unpredictability of drone package delivery, including takeoff and breakdown circumstances. They formulate the GADOP framework as a three-stage stochastic integer programming model. Dejun Guo and Kam K. Leang [Reference Guo and Leang145], in their work, Image-Based Estimation, Planning, and Control of a Cable-Suspended Payload for Package Delivery, present an image-based approach that enables an aerial robot with a cable-suspended device to locate a payload of unknown bulk, picking it up, transporting it, and relocating it The new nonlinear observer, which does not require localization information from external sensors is created for controlling the robot’s velocity. The goal of Seokkwan Yoon et al. [Reference Yoon, Lee and Pulliam151] the study is to investigate the effects of the separation distances between rotors and also fuselage and wings on the performance and efficiency of multirotor systems.
3.8.2 Practical report
Most delivery drone ideas use point-to-point airborne delivery CONOPS from a warehouse to the front or back yards of a customer’s home or business office area. Instead, L. A. Young [Reference Young152] discusses an alternate approach to the typical notional small package delivery drone concept. The proposed method is similar to current postal deliveries in that a small aerial vehicle flies from a warehouse to designated neighborhood VTOL landing spots, where it converts to a “roadable” (ground-mobility) vehicle that transits on sidewalks and/or bicycle paths until it arrives at the residence/office drop-off points. It is suggested that the MICHAEL (Multimodal Intra-City Hauling and Aerial-Effected Logistics) concept potentially results in a more community-friendly “delivery drone” approach. Mohit Mehndiratta and Erdal Kayacan [Reference Mehndiratta and Kayacan153] present an instantaneous learning-based control approach for the precise trajectory tracking of a 3D-printed aerial robot that can adapt itself to changing working conditions. Indeed, three case scenarios, payload mass variations on an aerial robot for a package delivery problem, ground effect when the aerial robot is hovering/flying close to the ground, and wind-gust disturbances encountered in the outdoor environment, have been investigated in this research. In each case study, parameter variations are learned using the nonlinear moving horizon estimation (NMHE) method, and the estimated parameters are fed to the nonlinear model predictive controller (NMPC). Vempati et al. [Reference Vempati, Crapanzano, Woodyard and Trunkhill146], in their 2017 research, analyzed how a model of the air-based delivery system can be implemented to maximize Amazon’s profit and how variability in consumer demand can affect deliveries. Marc Narkus-Kramer [Reference Introduction154] seeks to quantify the potential magnitude of the level of traffic and economic impact of small autonomous unmanned aerial systems (UAS) operating below 500 feet in metropolitan areas. NASA and the FAA have been developing a UAS traffic management system, and this study demonstrates how important this effort will be in fulfilling future demand for small altitude UAS. Among those who have contributed to this work are Ashruf Ali et al. [148, Reference Ali, Ballou, McDougall and Valle Ramos155]. They presented a tool to help package delivery service providers in configuring the best multi-rotor vehicle for their payload application. The design-state-space algorithm is made up of two independent multi-rotor aircraft models: (1) a power consumption model and (2) a comprehensive dynamic flight model.
UAVs can operate in restricted places and hover over a subject of interest, but they have limited flying duration and endurance. A traditional contact-based charging method for UAVs has been utilized; however, successful docking needs great landing precision. In place of the current method, Ali Bin Junaid et al.’s study proposes an autonomous wireless battery charging system for UAVs in outdoor situations [Reference Junaid, Konoiko, Zweiri, Sahinkaya and Seneviratne149]. There is a demand for rapid and extremely precise re-supply missions in many civil or military operations. Seth W. Jackson and his research team member [Reference Jackson156] offer a new re-supply method to answer this demand. The concept will allow a quadcopter carrying 1.5 pounds of goods to be delivered within a 5-m radius of a ground impact site. The team worked through an extensive design process and developed a system capable of achieving the mission with autonomy and proved the capability to autonomously deliver the microlight payload with 5-m accuracy. Mohit Mehndiratta et al. [Reference Mehndiratta, Kayacan and Kayacan150] develop simple learning (S.L.) strategy for feedback linearization control (FLC) algorithm for uncertain nonlinear systems. The package delivery challenge of a tiltrotor tricopter unmanned aerial vehicle is examined in real-time to assess the efficiency and usefulness of the SL-FLC architecture. The experimental results demonstrate that the SL-FLC framework outperforms the standard FLC technique in terms of path tracking performance while retaining nominal control performance in the absence of uncertainties and displaying resilient control performance in the presence of uncertainties.
4.0 Conclusion
In this study, extensive samples of previous research on multi-rotor applications have been discussed to demonstrate the important role of UAVs in UASs, and how they can improve the performance of preexisting systems. Different classifications of drones are investigated, and a more thorough categorization is developed. UAVs’ applications have been divided into eight groups due to their effective applications on preexisting systems, which are: (a) Urban Air Mobility (UAM), (b) Ambulance, (c) Mapping, (d) Disaster Management, (e) Agricultural, (f) Wildlife Monitoring, (g) Law Enforcement, (h) Logistic. Moreover, each group is analyzed in six domains: (1) Control and path planning, (2) Camera and Image Processing, (3) Sensor Fusion, (4) System Design, (5) Aerodynamic and configuration, (6) Statistic Data Review and Analysis.
To have a more comprehensive report, statistics of the previous research are illustrated in the form of figures. As shown in Fig. 10, the most popular research fields are Wildlife Monitoring and Logistic, closely followed by Urban Air Mobility and Disaster Management drones. From Fig. 11, it is evident that Statistic Data Review and Analysis is the most popular area of research, followed by Control and Path Planning and System Design as the second and third popular areas.
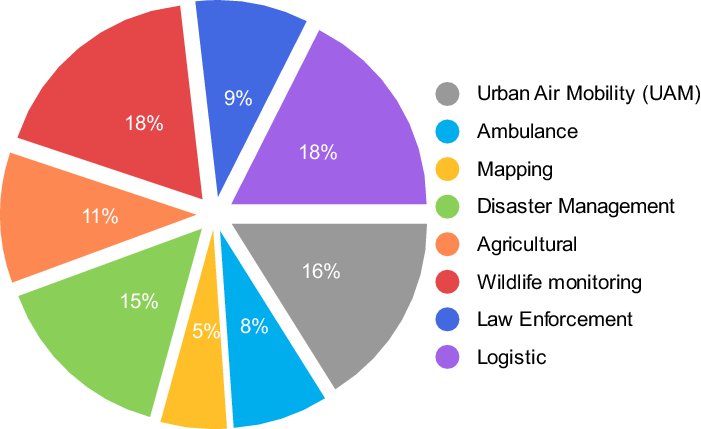
Figure 10. Research focus on different applications of multi-rotors.

Figure 11. Research focus on different domains.
From Figs. 12, 14, 15, 17, it can be seen that the main focus of research on Urban Air Mobility, Mapping, Disaster Management, and Wildlife Monitoring has been on Statistic Data Review and Analysis. Figure 13 shows that System Design is a famous area in Ambulance drones. From Fig. 16, it is evident that the main focus of researchers working on Agricultural drones has been on the Camera and Image Processing area. Figure 18 reveals that the majority of researchers on Law Enforcement drones dedicated their time to Control and Path Planning. Figure 19 shows that Statistic Data Review and Analysis and Control and Path Planning are the most attractive areas, closely followed by the System Design area, for researchers working on Logistic drones. These figures are spotlights on research popularities and gaps in every specific application, and a design team can easily determine the research gap for their target application of UAV.

Figure 12. Research focus on urban air mobility drones.

Figure 13. Research focus on ambulance drones.

Figure 14. Research focus on mapping drones.

Figure 15. Research focus on disaster management drones.

Figure 16. Research focus on agricultural drones.

Figure 17. Research focus on wildlife monitoring drones.

Figure 18. Research focus on law enforcement drones.

Figure 19. Research focus on logistic drones.



















